VO 7+8+9 Data Assimilation
1/15
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai | Chat |
|---|
No analytics yet
Send a link to your students to track their progress
16 Terms
When was the first successful weather forecast?
Charney, Fjørtoft, von Neumann 1950
computing time 24h for 24h forecast
Timeline weather forecast
First operational numerical weather forecasts: → 1954 in Sweden
→ 1955 in the USA(although not really useful forecasts yet for several years)
NWP pioneers HPC
1958: First generation of initial conditions using an objective analysis method at the National Meteorological Center (NMC; now the National Center for Environmental Prediction, NCEP)
1966: Primitive equations for NWP are used for the first time
1971: Creation of the first "nested" regional model
1978: The optimal interpolation (OI) technique is used for data assimilation for the first time → beginning of data assimilation, but initially limited to direct measurements of model variables
Evolution since 1980
1980: First spectral global model
1992: First ensemble forecasting system at ECMWF (but not really usable in
the early years)
From 1995: Development of "high-resolution" regional models, e.g., MM5 (USA), MC2 (Canada), Meso-NH (France), COSMO (formerly LM, Germany)
1996: ECMWF switches from the "optimal interpolation (OI)" technique for data assimilation to a 3-dimensional variational system (3D-Var) and one year later to 4D-Var (direct assimilation of satellite data/radiances)
2011: Introduction of "hybrid" data assimilation at ECMWF (use of an ensemble for error estimation). Other weather services switched around the same time or followed shortly after.
2012: Operational introduction of the DWD COSMO-DE ensembles as the first operational regional ensemble system
2023: First machine learning models in parallel operation
Why can raw NWP model output not always be directly used for local weather forecasts?
Models cannot resolve local effects (zb ground inversion, local topography, fog, subgrid clouds)
Models have systematic errors (zb precipitation intensity, ground temperature, cloud cover)
Many different models and measurements (temperature, wind, radar) are available
Model information is often several hours old by the time it reaches the user (computing time for data assimilation + model, transmission)
What is done during product generation and statistical post-processing?
Calculation of additional diagnostic variables (sunshine, surface fields, cloud cover, model variables) from the prognostic model variables
Mixing of different models (possibly weighting)
Calculation of probabilities from ensembles
Correction of model forecasts using current measurements
Correction of systematic errors (Model Output Statistics, MOS), used in all automated forecasts
What is Model Output Statistics / MOS ?
→ Correction of systematic errors
Over a training period (one year), the direct model output is compared with measurements (e.g., linear regression or machine learning)
Different model fields and levels are linked (ground temperature errors can also depend on zb wind, inversion/stability, or fog/cloud cover)
Automated corrections are then calculated for each location
For certain variables (ground temperature), MOS is virtually unbeatable, but for rare extreme events, it sometimes struggles
27
What is blending in short-term weather forecasting and why is it used?
for short-term lead times (0-6h):
combines nowcasting with NWP forecasts to improve forecast quality
Goal: create a smooth transition between the information sources using slowly changing weights.
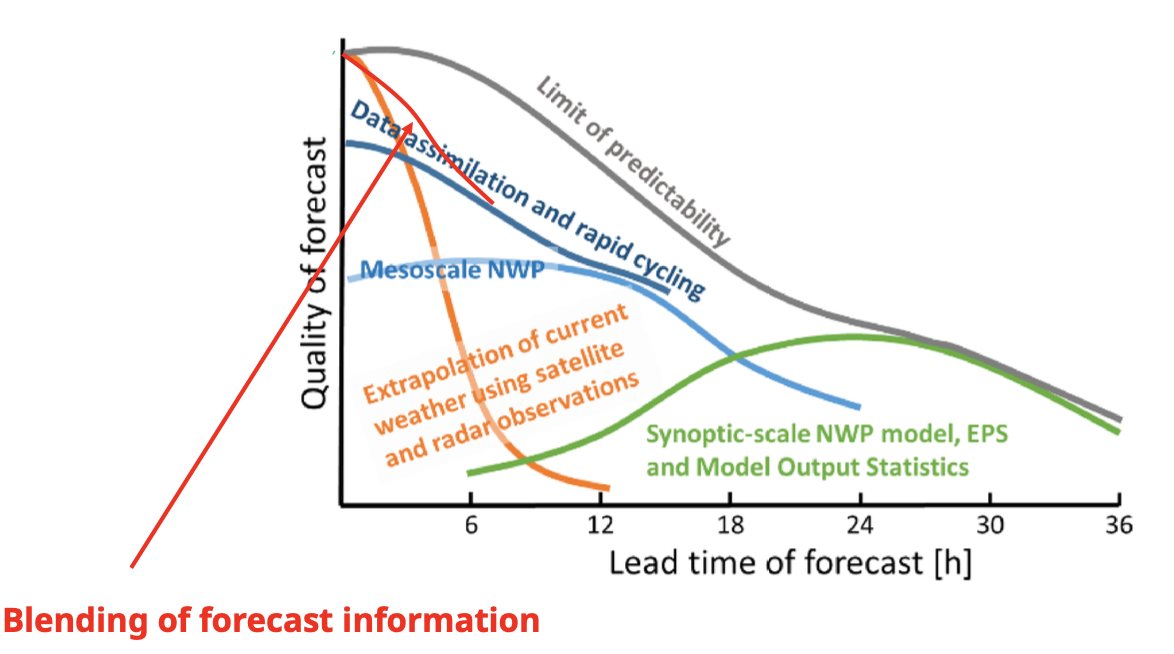
What is nowcasting, and why is it important at the beginning of the forecast period?
Nowcasting:
extrapolation of current radar and satellite observations
especially useful for the first 1–2 hours
during this period, NWP forecasts are not yet available usually and sometimes produce artifacts (model spin-up)
What is Data Assimilation?
Analysis = best estimate of the atmospheric state in the model space (model grid and model variables)
If the problem is overdetermined:
more measurements than model degrees of freedom)→ averaging/interpolation
problem is almost always underdetermined:
too few measurements
measurements unevenly distributed
measurements not equal to the model variable
additional background information required:
climatology
rough estimate
persistence
short-term forecast
In NWP: latest available forecast = background / first guess
Mathematically optimal combination:
Least-squares method
Optimal weighting of measurements and background
Where else is data assimilation used?
reanalysis
oceanography
medicine (MRI, CT, etc)
Oil deposits
astrophysics
epidemic modeling
animal populations
etc.
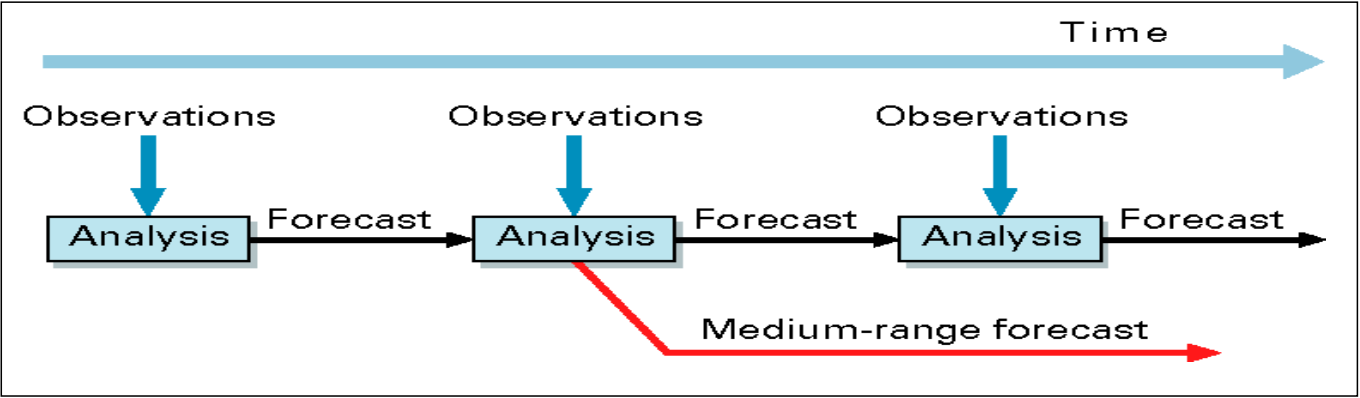
How does the ECMWF assimilation cycle work?
observations are used to correct errors in the short-term forecast from the previous analysis time
The analysis is mainly (> 95% information content) based on information from the short-range forecast, but this forecast also carries information from past observations into the current analysis
→ this means the information from observations is cycledThe data assimilation procedure takes as much computer power as the 10-day forecast
ECMWF has more staff working on data assimilation than on model development
What is the Gaussian distribution?
68% of values within ± σ (Standard deviation)
95% of values within ± 2σ
σ=n−1∑i=1n(xi−x)2
Distribution that occurs frequently – and if not, a distribution can often be transformed to suit it
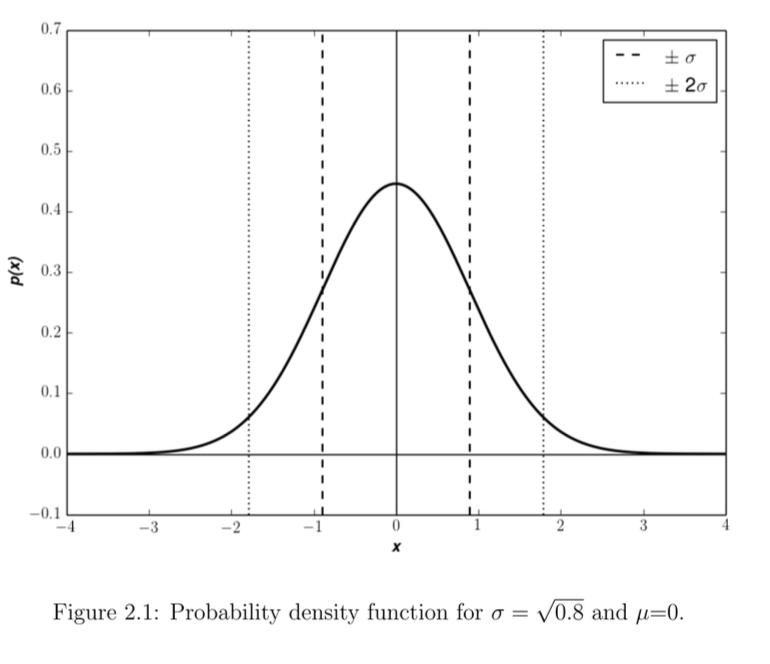
Properties of the Gaussian distribution?
defined by two variables: mean and standard deviation (σ)
Normal distribution remains normal under any linear transformation
Variables whose distribution and errors usually deviate from normal distribution:
Humidity
precipitation
clouds/hydrometeors
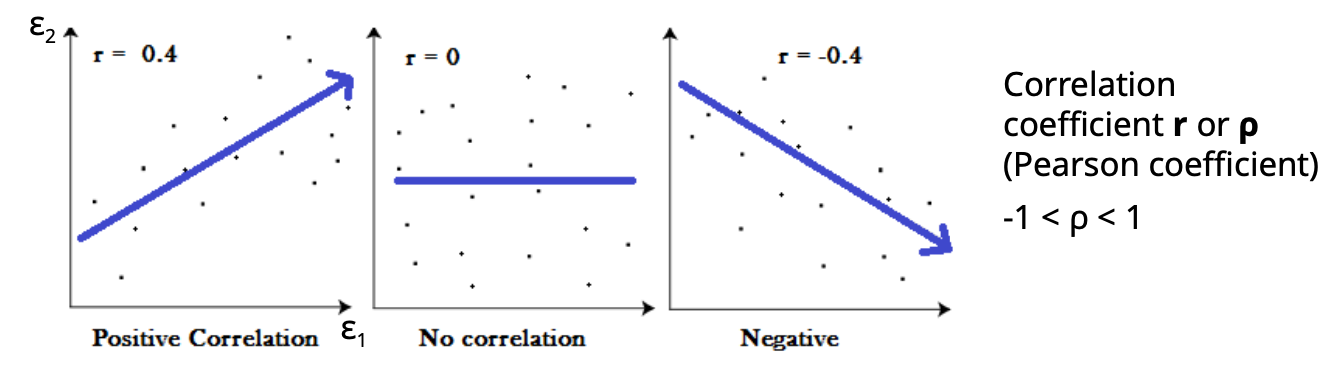
What does correlation between two errors ε1 and ε2 describe?
Pearson correlation coefficient: −1 < r < 1
r > 0: positive correlation
r = 0: no linear correlation
r < 0: negative correlation
For uncorrelated errors:
ϵ1⋅ϵ2=0
→ the expected value of the product of two errors is 0
no causal relationship between the two errors
Independent information from the two sources (information content is lower if
errors are correlated)
Reality:
Errors of model and measurement are usually uncorrelated
Errors of different measurements are partially correlated
Model errors are almost always spatially and temporally correlated (both an advantage and a disadvantage)
The correlation coefficient describes only linear dependence; nonlinear relations, e.g. for clouds, may not be represented correctly
Easiest example for data assimilation
Given at a grid point:
Measurement T_o (observation)
Forecast T_b (background)
What we want:
Optimal combination T_a (analysis) from T_o und T_b
T_a should provide an optimal estimate of T_t (the truth)
Error epsilon:
ϵo=To−Tt
ϵb=Tb−Tt
ϵa=Ta−Tt
Assumption:
T_o and T_b have no systematic error (no bias): E(epsilon_o) = E(epsilon_b) = 0
→ where E() = expected value → average value over many realizationsMean errors of T_o and T_b are known and normally distributed: E(epsilono2) = epsilon_o^2 ; E(epsilonb^2) = epsilon_b^2 → sigma = standard deviation → sigma^2 = variance
• Errors of To and Tb are not correlated: E (epsilono epsilonb) = 0
BLUE - Best Linear Unbiased Estimate