2 Meccanica Razionale Capitolo 2: Cinematica del corpo rigido
1/61
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
62 Terms
come si fa a sapere il moto di un punto nel tempo
bisogna conoscere il vettore posizione in funzione del tempo
OP(t)

che cosa è la traiettoria del punto
la curva parametrizzata con t della forma

a che cosa serve la descrizione della traiettoria tramite la ascissa curvilinea,
come è definita la ascissa curvilinea
la ascissa curvilinea è definita come segue;
serve per descrivere la traiettoria in un modo puramente geometrico e senza includere il tempo come parametro,
percio OP(t) diventa OP(s)
che cosa è la equazione oraria o legge oraria
è un cambio di parametro ce permette di cambiare la parametrizzazione dalla ascissa curvilinea alla parametrizzazione con il tempo
s = s(t)
come è definita la velocità media e velocità istnatanea di un punto lungo una traiettoria
velocità istantanea: v = ds/dt
velocità media come in immagine:
che cosa è un moto uniforme
un moto con accellerazione nulla: a = 0
che cosa è il moto uniforme e vario
un moto con accellerazione costante a = k
che cosa è il moto vario
un moto con accellerazione che varia secondo una funzione a(t)
come viene definita la velocità vettoriale
DERIVARE
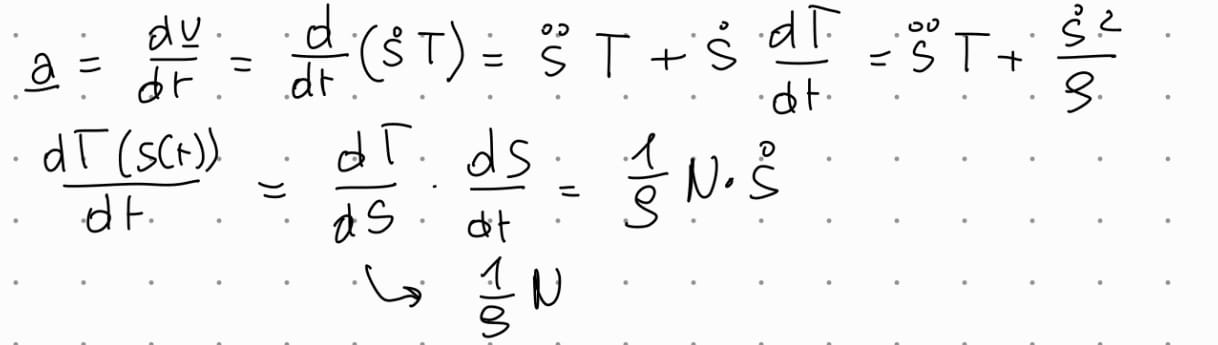
esprimere la accellerazione in forma vettoriale
DERIVARE
definizione di corpo rigido
un corpo si dice rigido se la distanza di due punti qualsiasi del corpo non varia nel tempo
quale è la condizione di rigidità
la invariabilità della distanza di due punti qualsiasi del corpo nel tempo
come si puo pensare un corpo rigido,
un insieme di punti che rispettano la condizione di rigidità
quando il moto di un sistema solidale è conosciuto
se è conosciuto il moto di ogni suo punto
quanti gradi di libertà ha un corpo rigido, quali sono?
6
3 servono per individuare la posizione del origine del sistema ortogonale solidale con il corpo, altri 3 servono per trovare la rotazione applicata al sistema solidale con il corpo
Derivare la formula di Poissaut
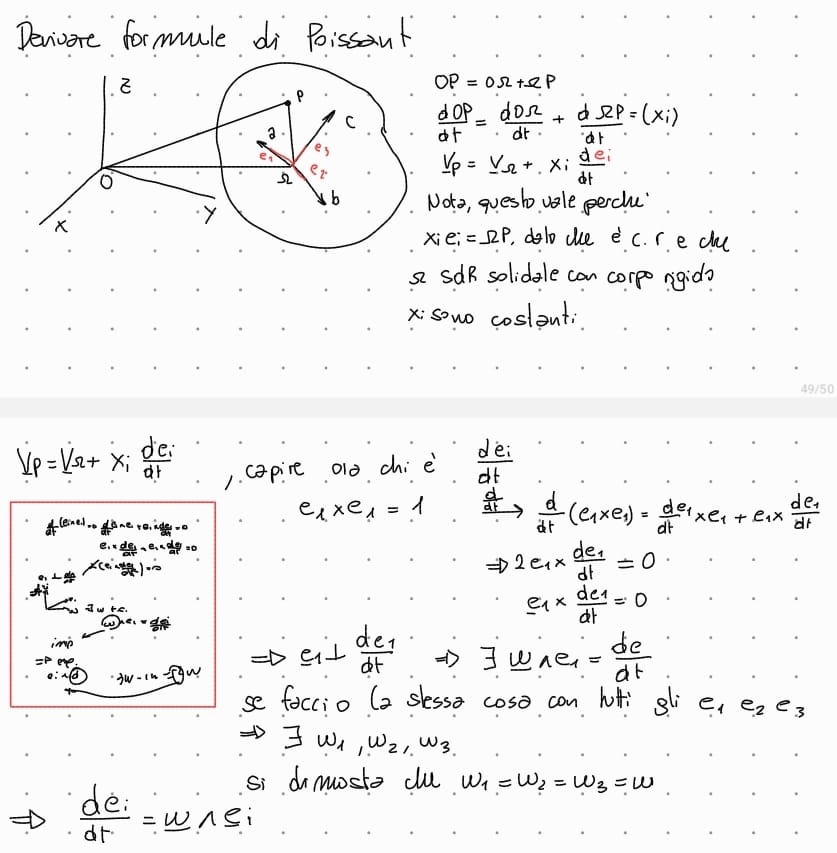
quale è la relazione fondamentale della cinematica rigida
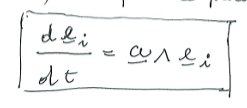
le formule di Poissant
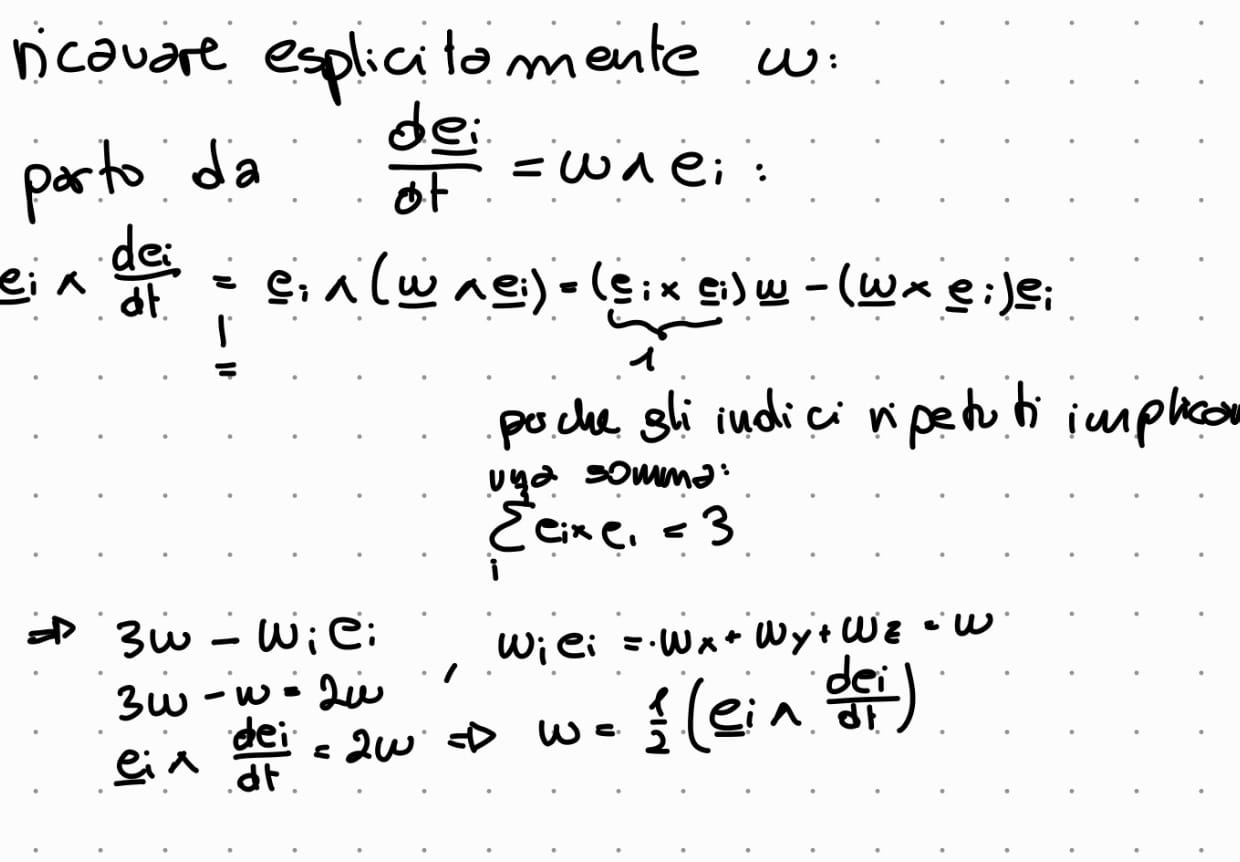
ricavare esplicitamente ω formula
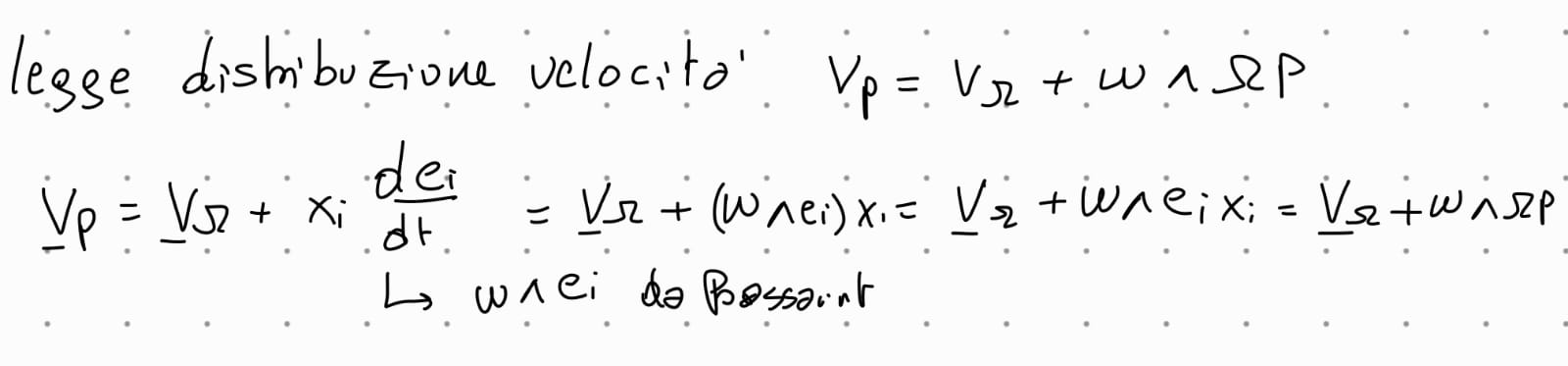
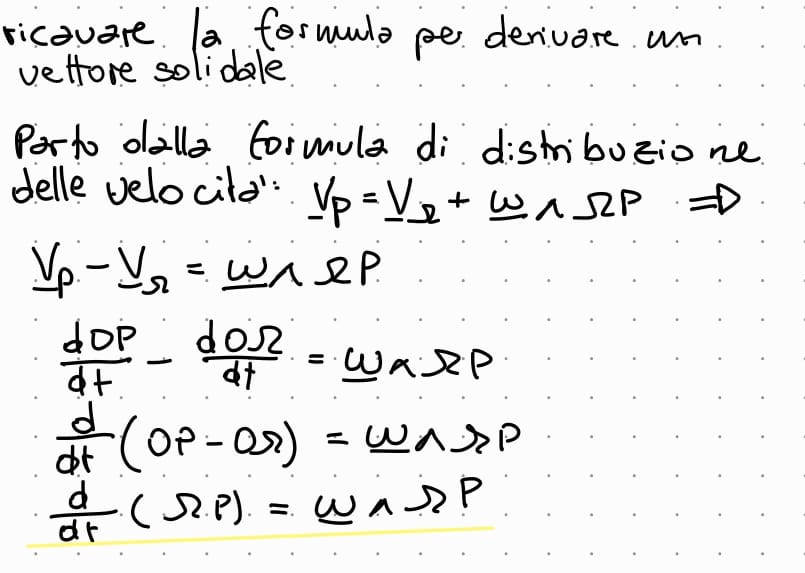
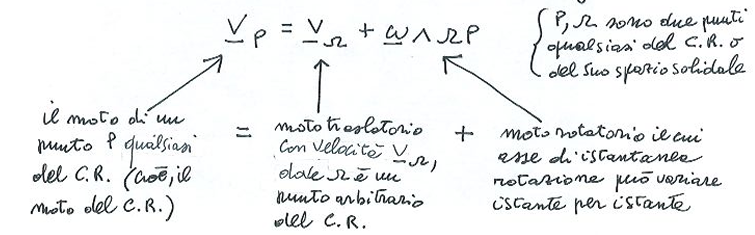
Legge di distribuzione della velocità, che cosa dice + come ricavare
formula di derivata di un vettore solidale ΩP rispetto ad un sistema globale, derivare la formula
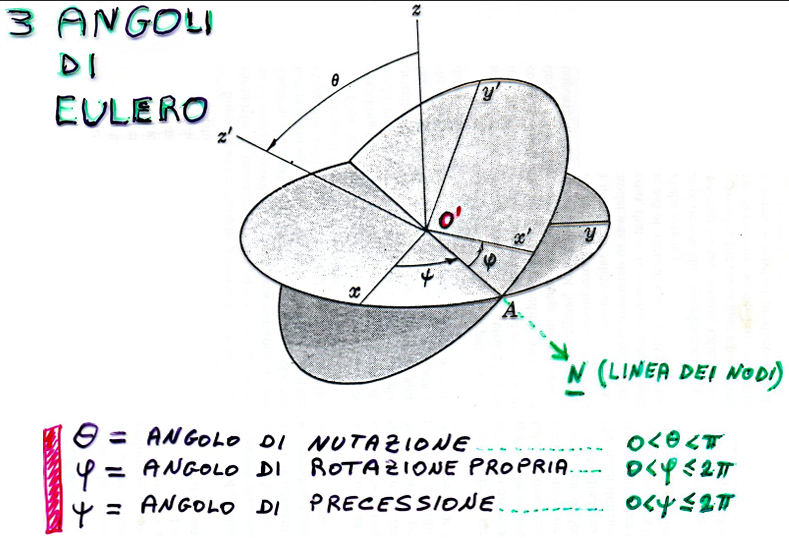
disegnare schematizzato i 3 agnoli di eulero per un corpo, come si chiamano?\
che cosa è una sospensione cardanica
una sospensione a due cardini che hanno un punto fisso nella intersezione dei due assi di rotazione
nel contesto dei tre angoli di eulero, che cosa è la linea dei nodi
la linea di intersezione tra il piano fisso es il piano ruotato dell’angolo di nutazione,
in pratica la intersezione tra lunico piano che effettivamente si muove,
si puo vedere osservando una sospensione cardanica come lasse che congionge la parte fissa alla parte mobile, se vogliamo il primo asse di rotazione
come si puo esprimere la velocità angolare tramite gli angoli di Eulero

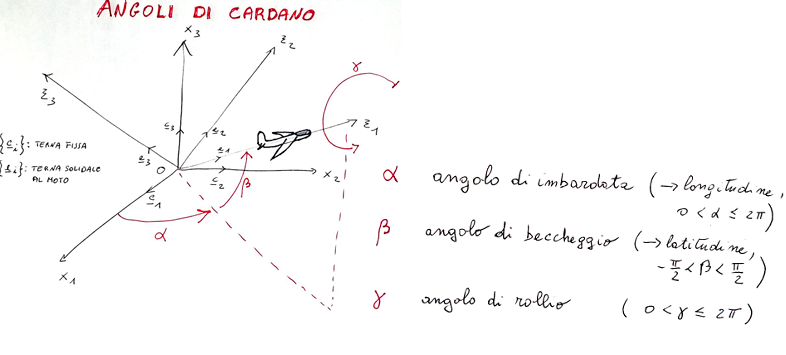
schematizzare gli angoli di cardano
come vengono classificati i moti rigidi,
moto traslatorio: un moto si dice traslatorio quando durante il moto ogni retta solidale al corpo rimane parallela
moto rototraslatorio: un moto si dice rototraslatorio se esiste una retta solidale con il corpo che si mantiene parallela a se stessa durante il moto
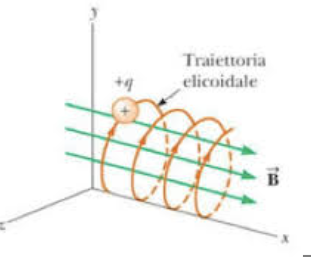
moto elicoidale (foto) : un moto si dice elicoidale se esiste una retta solidale al corpo i cui punti hanno velocità parallela a tale retta
(particolare caso di moto rototraslatorio)moto rotatorio: un moto si dice rotatorio se esiste una retta solidale al corpo i cui punti hanno velocità nulla
moto polare: un moto si dice polare o sferico se esiste un punto solidale al corpo che rimane fisso
moto di precessione: un moto è di precessione se:
è un moto polare
esisto due rette passanti per il punto fisso, una solidale al corpo ed una fissa, tali che l’angolo tra le due rette rimane costante durante il moto
quali sono le caratteristiche piu importanti del moto traslatorio
- gradi di libertà
- velocità di punti speciali
- velocità di un punto generico sapendo la velocità della terna ortogonale Ω
il moto traslatorio si dice se durante il moto la traiettoria di due punti qualsiasi genera due rette parallele
3 gradi di libertà
la velocità di ogni punto è uguale
si puo dimostrare che la velocità angolare è nulla:
quali sono le caratteristiche piu importanti del moto roto - traslatorio
- gradi di libertà
- velocità di punti speciali
- velocità di un punto generico sapendo la velocità della terna ortogonale Ω
- dimostrare che la velocità angolare è parallela all’asse invariante
- dimostrare che per ogni punto sullasse vale Vp = VΩ
moto roto- traslatorio: se esiste una retta solidale al corpo che durante il moto di mantiene parallela a se stessa:
4 gradi di libertà
nessun punto speciale
se prendo Ω come sistema di riferimento con un asse parallela alla asse invariante, allora ho che la velocità di un punto generico P si calcola come
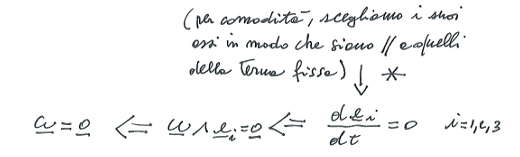
DIM scegliendo un sistema di riferimento solidale con il corpo, tale che e3 è lungo la asse invariante si ha che:
de3/dt = 0 —> ω ∧ e3 = 0 —> e3 e ω sono paralleliDIM applico la formula in disegno ad un punto generico sull’asse, avrò che ΩP è parallelo a e3, se scelgo il sistema di riferimeto globale tale che c3 // e3 avro dalla formula che la parte finale si annulla perché ω e ΩP sono paralleli

quali sono le caratteristiche piu importanti del moto elicoidale
- gradi di libertà
- velocità di punti speciali
- velocità di un punto generico sapendo la velocità della terna ortogonale Ω
un moto elicoidale si dice cosi se esiste un asse solidale al corpo i cui punti hanno velocità parallela alla asse
gradi di libertà: 2
scelgo il sistema di riferimento dell’osservatore tale che la asse c3 sia parallela alla retta descritta prima, anche il sistema solidale con il corpo lo scelgo tale che la asse e3 sia colineare con c3 e con la retta.
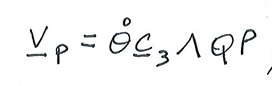
ne segue che la velocità di un punto qualsiasi sulla retta sarà:
Vp = VΩ c3
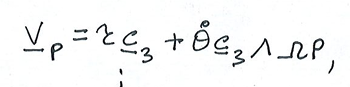
mentre per un punto non sulla retta sarà:
dove il primo termine tau c3 equivale a dire VΩ * c3
quali sono le caratteristiche piu importanti del moto rotatorio
- gradi di libertà
- velocità di punti speciali
- velocità di un punto generico sapendo la velocità della terna ortogonale Ω
un moto si dice rotatorio se esiste una retta solidale al corpo i cui punti hanno velocità nulla
1 grado di libertà
la velocità dei punti sulla reta
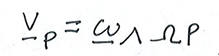
la velocità di un punto qualsiasi è data da:
dove il sistema di riferimento globale è scelto tale che la asse sia conilneare con c3 e ela velocità di un generico punto è su un piano normale alla asse di rotazione
quali sono le caratteristiche piu importanti del moto Polare o sferico
- gradi di libertà
- velocità di punti speciali
- velocità di un punto generico sapendo la velocità della terna ortogonale Ω
- il moto polare è un moto rotatorio?
- che cosa è la asse di istantanea rotazione
un moto di dice sferico se esiste un punto solidale al corpo fisso nello spazio
3 gradi di libertà
la velocità del punto fisso è nulla, la velocità di ogni punto sulla asse di istantanea rotazione è nulla
la velocità di un punto a caso è:
il moto polare non è un moto rotatorio dato che il vettore velocità angolare puo cambiare istante per istante
la asse di istantanea rotazione è un asse passante per il punto fisso e concorde con ω
che cosa è la asse di istantanea rotazione
in un moto polare o sferino la asse passante per il punto fisso e di direzione di ω
quali sono le caratteristiche piu importanti del moto di precessione
- gradi di libertà
- velocità di punti speciali
- velocità di un punto generico sapendo la velocità della terna ortogonale Ω
- come si calcola la velocità angolare del sistema
il moto di precessione deve avere due caratterisitche:
- moto polare
- esistono due rette passanti per il punto fisso, una è solidale con il corpo, laltra solidale con il sistema di riferimento globale. durante il moto langolo tra le due rette non cambia
2 gradi di libertà
i punti lungo la asse fissa rispetto al sistema di riferimento hanno velocità nulla
la velocità di un generico punto si calcola come:
dove ω è la somma delle velocità angolare di rotazione attoro alle due assi
nel contesto dellorbita terrestre, che cosa è
Eclittica
Equatore celeste
Equinozio
Eclittica
La traiettoria apparente che il Sole descrive nel cielo durante un anno. È il piano dell'orbita terrestre proiettato sulla sfera celeste.
Equatore celeste
Una proiezione dell'equatore terrestre nello spazio. È una linea immaginaria che divide la sfera celeste in due emisferi, nord e sud.
Equinozio
Uno dei due momenti dell'anno in cui il giorno e la notte hanno la stessa durata. Avviene quando il Sole è esattamente sopra l'equatore celeste, il 20 o 21 marzo e il 22 o 23 settembre.
quale è la relazione fondamentale della cinematica rigida
come si puo definire il moto piu generale
un moto dove tutti i punti si muovono di moto traslatorio e doce la velocità angolare cambia di istante in istante e il corpo ruota attorno all’asse di istantanea rotazione
enunciare la legge di distribuzione degli spostamenti
partendo dalla legge di distribuzione delle velocità, si scrive:
dP/dt = dΩ/dt + ω ∧ ΩP
che diventa:
dP = dΩ + dψ ∧ ΩP con ψ = ω * dt
come è la formula per la accellerazione di un moto rigido,
che cosa succede se prendo ω diverso da 0
Bisogna derivare rispetto al tempo la legge di ditribuzioni della velocità:
aP = dvP/dt = dvΩ/dt + dω/dt ∧ ΩP + ω ∧ dΩP/dt
dΩP/dt = ω ∧ ΩP perche ΩP è un vettore rigido con il corpo
la formula finale è
aP = aΩ + ω˙ ∧ ΩP + ω ∧ (ω ∧ ΩP)
prendendo ora ω diverso da 0 scompongo ΩP con una componente parallele ed una normale a ω: ΩP = ΩQ + QP
ω ∧ ΩP = ω ∧ QP dal momento che: ω ∧ ΩQ =0
avrò ora che:
ω ∧ (ω ∧ ΩP) = ω ∧ (ω ∧ QP) = (ω × QP)ω − ω² QP
dato che ω × QP =0
per come QP è stato definito segue: ω ∧ (ω ∧ ΩP) = −ω²QP
ne segue che
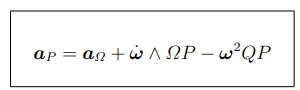
che cosa è la accellerazione centripeta
nella formula della accellerazione di un corpo rigido, il termine -ω²QP
quando è che in generale si puo parlare “semplicemente di accellerazione del corpo“
quando il corpo ha moto translatorio e percio velocità angolare nulla
che cosa dice il TEOREMA DI DERIVAZIONE RELATIVA
parto da un sistema di riferimento assoluto ed uno relativo, il teorema mette in relazione la velocità di w, (w vettore variabile nel tempo) calcolata rispetto al sistema di riferimento assoluto e la velocità di w calcolata rispetto a quello relativo è: doce ω è la velocità angolare del sistema di riferimento relativo rispetto a quello assoluto
perchè nel teorema di derivazione relativa non compare la velocità del sistema di riferimento relativo ma solamete la sua velocità angolare
a noi intaressa capire come il vettore w cambia nel tempo se visto da due sistemi di riferimento differenti. w si puo pensare come un vettore applicato —> la velocità cambia sono se cambia il suo vero o il suo modulo.
Ne segue che:
se la velocità angolare del sistema di riferimento relativo è nulla e ha solo una velocità di trascinamento e il vettore w non cambia lunghezza —> la fine del vettore i linizio del vettore si muovono via alla stessa velocità, e percio la derivata temporale del vettore w rispetto ad un solo moto traslatorio del sistema di riferimento relativo non cambia!
non appena però si ha una rotazione del sisteam di riferimento allora il vettore w fisso nel sdr globale dal punto di vista del sdr relativo ruota —> ha velocità
che cosa dice il TEOREMA DI GALILEO della composizione delle velocità
Vp(a) = Vp(r) + Vp(t) dove:
Vp(a) è la velocità assoluta di P
Vp(r) è la velocità relativa di P
Vp(t) è la velocità relativa, la velocità che avrebbe P se per un istante fosse solidale con il SdR relativo
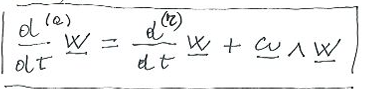
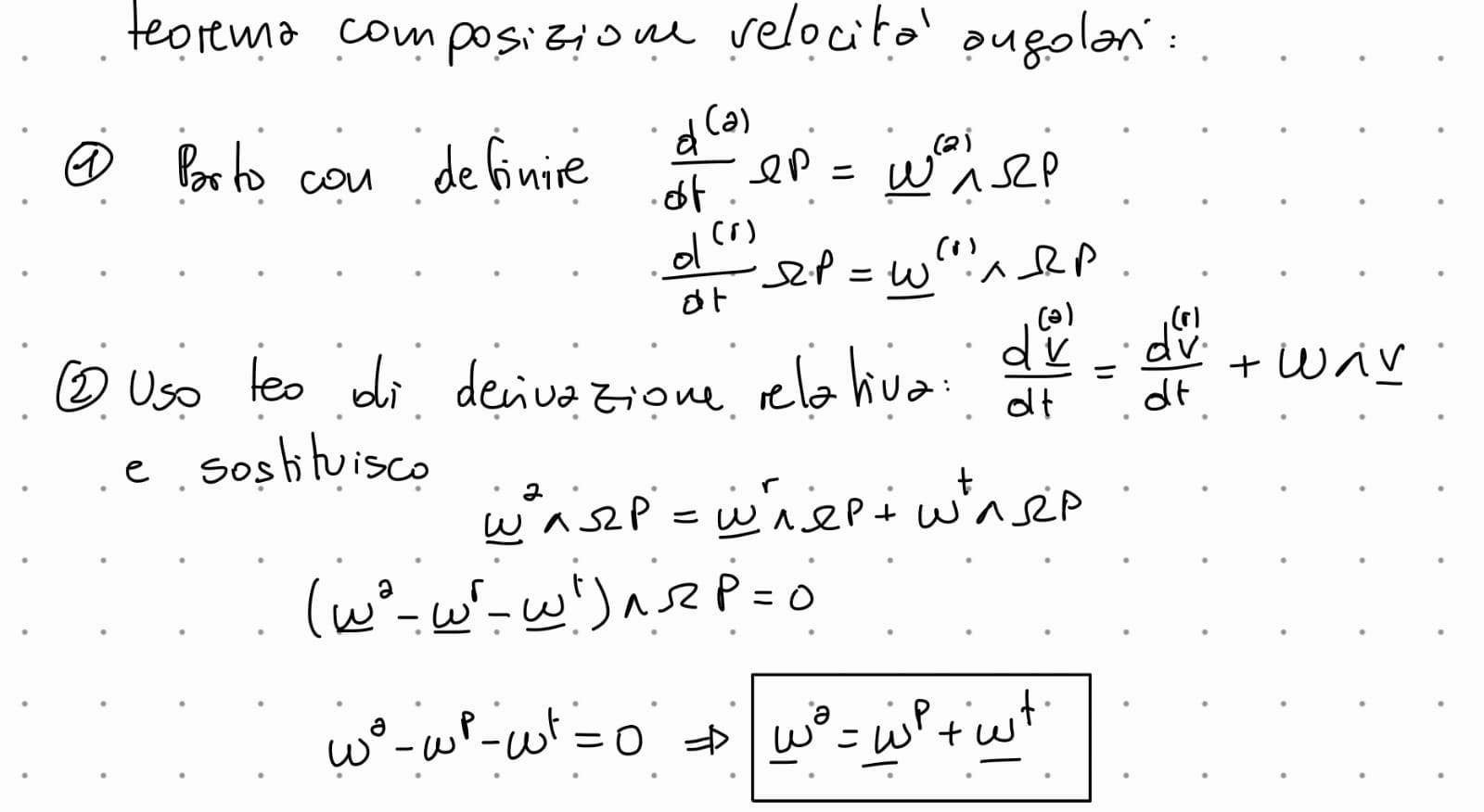
che cosa dice il teorema di conposizine delle velocità angolari DERIVARE
dove: ω(t) è la velocità angolare di trascinamento, cioè la velocità angolare che il corpo rigido avrebbe se nellistante fosse solidale con il sistema di riferimento relativo
descrivere il punto di vista lagrangiane e quello euleriano,
quando è conosciuto il moto dell’intero sistema
Lagrangiano:
seguire una particella istante per istante misurando velocià, posizione, accellerazione in un INTERVALLO di tempo,
si dice punto di vista globale, perché
il moto dell’intero sistema è conosciuto quando si conosce il moto di ogni singola particellaEuleriano
si misura lo STATO del sistema in un determinato spazio di controllo. si misurano accellerazioni, velocità e posizioni
di dice punto di vista locale AUTOSTOP
che cosa è un atto di moto?
che cosa è la velocità euleriana
come atto di moto viene definito linsieme di tutti i vettori velocità euleriane in uno spazio di controllo in un cerrto istante
accellerazione / velocità euleriana, la velocità / accellerazione di una particella che vista da un punto di vista euleriano transita in un certo istante nello spazio di controllo
quale è la differenza sostanziale tra atto di moto e moto
un moto avviene in un intervallo di tempo, gli atti di moto sono associati ad un istante fissato
classificare gli atti di moto
scrivere la legge che descrive la velocità di un punto P solidale con il corpo
AM traslatorio:
quando tutti i punti del corpo hanno nellistante considerato la stessa velocità (euleriana)
Vp = VΩ per ogni puntoAM rototraslatorio
se esiste una retta solidale con il corpo i cui punti nellistante considerato hanno la stessa velocità.
Vp = VΩ + ω ∧ ΩP se scelgo Ω sulla asseAM elicoidale
se esiste una retta slidale al corpo i cui punti nellistante considerato hallo la setssa velocità e questa è parallela alla retta stessa:
Vp = VΩ + ω ∧ ΩPAM rotatorio
se esiste una retta solidale con il corpo i cui punti hanno velocità nulla, scelto Ω b sulla retta si ha Vp = ω ∧ ΩP
enunciare il TEOREMA DI MOZZI
che cose è la asse di mozzi
latto di moto rigido piu generale è il moto elicoidale
la asse di mozzi è la asse del moto elicoidale parallela a ω
come si puo approssimare il moto arbitrario di un corpo rigido?
tramite il teorema di mozzi si sa che latto di moto piu generale è quello elicoidale,
il moto arbitrario di un corpo si puo approssimare con successione di infiniti atti di moto elicoidali dove la asse dei mozzi varia continuamente
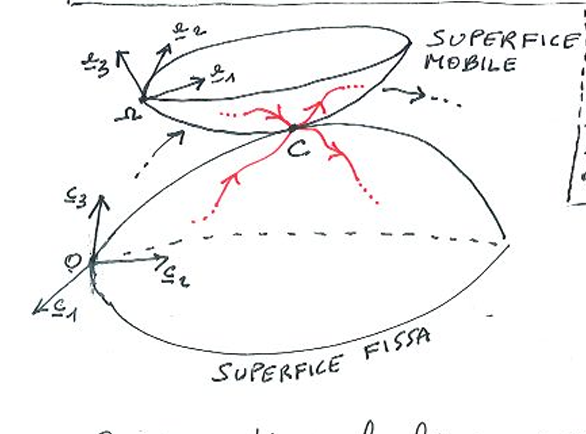
definizione di rotolamento di due superfici
dal punto di vista geometrice
dal punto di vista delle velocità
due supercifi rotolano luna sull’altra se in ogni istante il piano tangente nel punto di contatto è lo stesso per le due superfici
la velocità di striscamento del punto di contatto è nulla
per due superfici che rotolano una sullaltra, definire la velocità di strisciamento:
la velocità di strisciamento è la differenza di velocità tra la velocità del punto di contatto visto dallosservatore fisso e relativo
partendo dal disegno, definisco:
velocità assoluta Vc(a) = d/dt OC
velocità relativa Vc(r) = d/dt ΩC
velocità di strisciamento Vc(t)= Vc(a) - Vc(r)
che cosa è il puro rotolamento
rotolamento senza strisciare quando la velocità di strisciamento è nulla
quale è la condizione scalare per il puro rotolamento di due superfici in forma differenziale?
dS(a) = dS(r)
definizione di moto rigido piano
un moto si dice rigido e piano se si puo identificare un piano solidale con il corpo che rimane parallelo ed equidistante ad un piano nel sistema di riferimento globale
quali sono le due possibilità di un atto di moto rigido piano
atto di moto rigido piano puramente traslatorio
atto di moto rigido piano puramente rotatorio
in un moto rigido piano il moto della sezione parallela determina completamente il moto dell’intero sistema
s'ì
che cosa è il centro di istantanea rotazione, a che sistema si riferisce
il centro di istantanea rotazione si riferisce al moto rigido piano. nel caso l’atto di moto sia di rotazione, il centro di istantanea rotazione è il punto che ha velocità nulla nell’istante considerato
come si fa a determinare in modo geometrico il centro di istantanea rotazione per un sistema di moto rigodo piano
Teorema di Chasles
si prende un vettore i si traccia una retta ortogonale a esso passante per il punto di applicazione. si ripeto con un altro vettore non nullo —> la intersezione sarà il centro di istantanea rotazione
che cosa sono la base e la rulleta a livello concettuale
sono linsieme della di tutti i centri di istantanea rotazione al variare del tempo, dato che è catatterizzato da sono un parametro è una curva
definizione di BASE
la base è la curva descritta dal centro di istantanea rotazinoe al variare di t rispetto al sistema dell’osservatore (globale)
definizione Rulletta
la curva descritta dal centro di istantanea rotazinoe al variare di t rispetto al sistema solidale con il corpo