4. Navigation
1/4
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
5 Terms
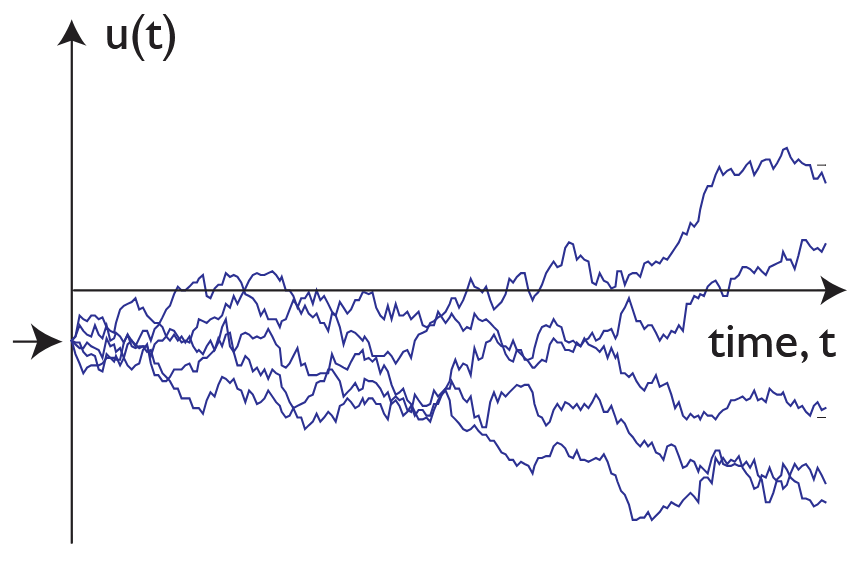
What is the fundamental problem of Dead-Reckoning?
If the agent knows its current heading direction & speed it can estimate its change of position by integration.
Integration leads to an accumulation of uncertainty.
=> Need for “recalibration” / re-setting of the estimate.
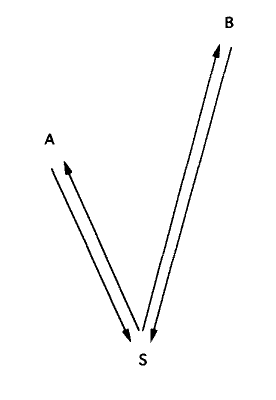
What is a common test to find out if an animal uses a Map?
When the animal can generalize beyond stimulus-response chaining of previous observations, f.e. take a short-cut (A→B) it previously has not.
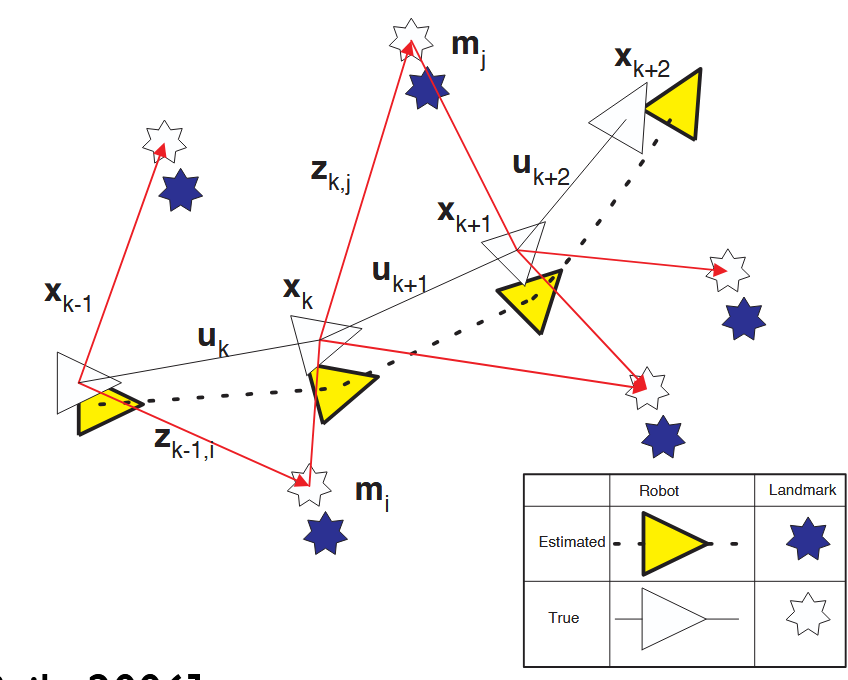
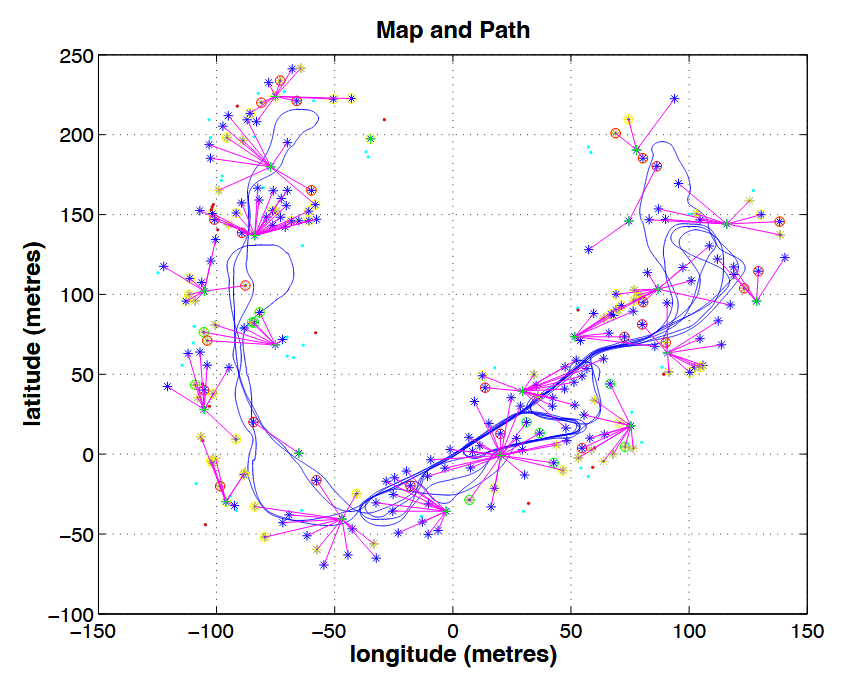
What is SLAM?
Simultaneous Localization and Mapping.
Problem of learning path integration and using this to associate landmark information with locations.
What is the problem of Loop Closure?
Problem in SLAM, where an agent has reached a spot it has seen before through a different way.
Needs to recognize location and correct errors in map, so that the same location has the same place in the map (“close the loop”).
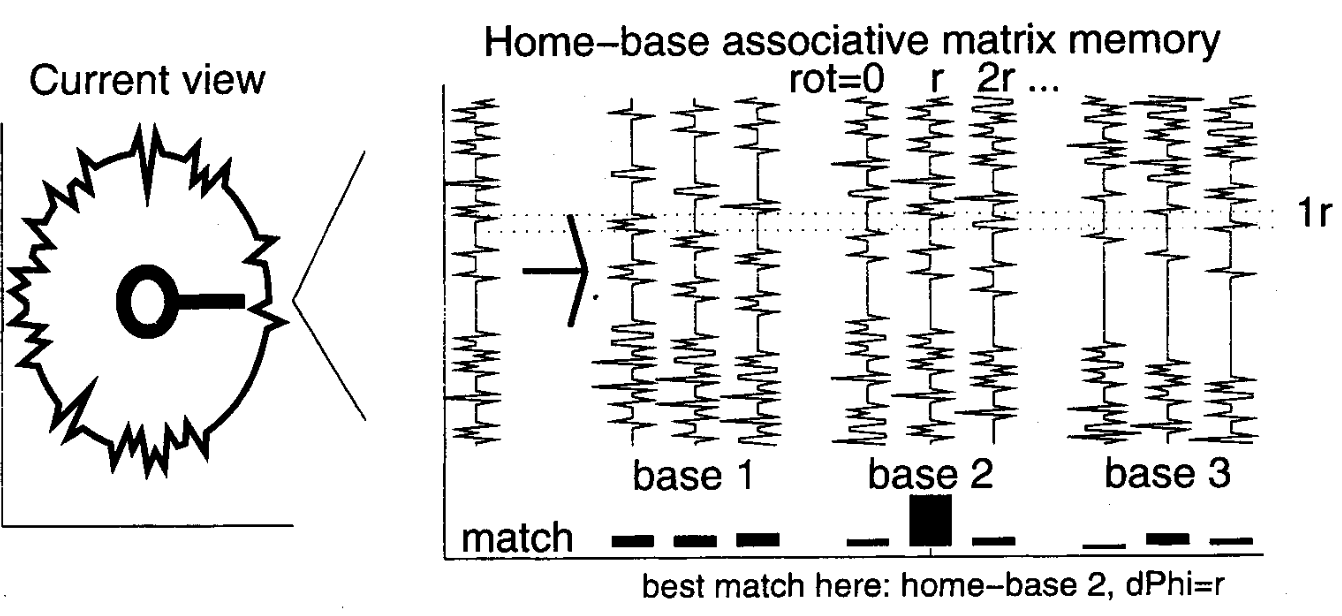
How does Visual Place Navigation work in Neural Dynamics?
Views of surrounding are stored together with current position around particular locations (“hombases”).
All stored views are compared to current view (with all rotations actively generated).
Level of correlation across multiple views within a home base generates position estimate.