Unit 6 - Discrete-time Signals and Systems
1/70
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
71 Terms
Biological Signals
generally CT; they are routinely sampled to yield discrete-time (DT) signals to facilitate signal analysis via computers
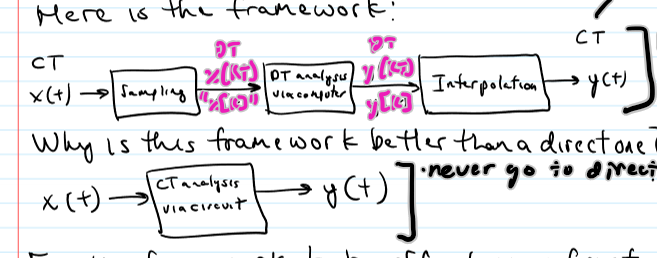
better than one below because it is recomfigureable (no component error; less costly, faster, and easier; more accurate); info can’t be lost in the sampling process and equivalent to saying that x(t) can be recovered from its samples (x[k])
![<p>better than one below because it is recomfigureable (no component error; less costly, faster, and easier; more accurate); info can’t be lost in the sampling process and equivalent to saying that x(t) can be recovered from its samples (x[k])</p>](https://knowt-user-attachments.s3.amazonaws.com/b52bde39-33d6-4baf-97b0-92cbe136aded.png)
Info in x(t) can’t be lost in the sampling process
intuitively, 2 conditions should be met for the answer to be yes → x(t) must have smoothness and the sampling must be fast enough
Shannon’s Sampling Theorem
CT signal, x(t), that is bandlimited frequency to BHz or 2piB rad/sec; x(t) can be exactly recovered from its sample x(k)=x(kt) provided that; Fs (sampling frequency) = 1/T (sampling interval) > 2B;
Proof of Shannon’s Sampling Theorem
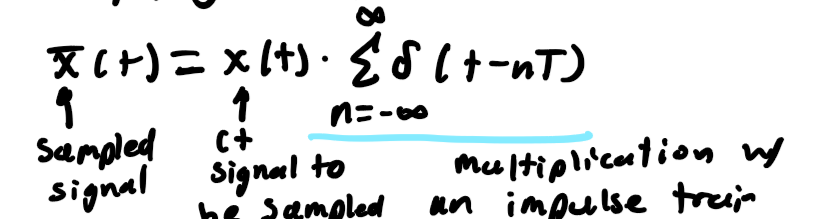
a signal can be sampled in time by multiplying it by an impulse train
Examples
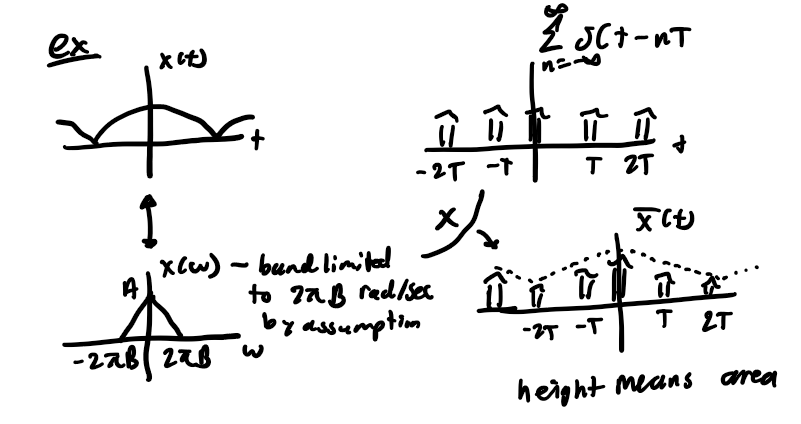
What is happening in the frequency domain?
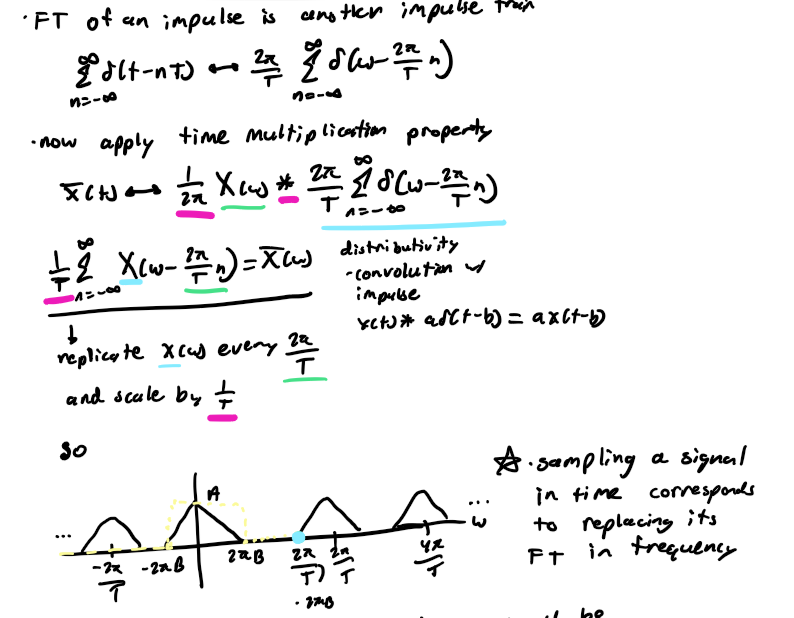
FT of an impulse is another impulse train; now apply time multiplication property; use distributivity and convolution w/ impulse; replicate X(w) every (2pi/T) and scale by (1/T); to reconstruct x(t) from xbar(t), X(w) should be recoverable from Xbar(w); this is possible if there is no overlap between successive cycles in Xbar(w) → X(w) can be recovered by a low pass filter; for no overlap to occur (2pi/T - 2piB > 2piB) so 1/T > 2B
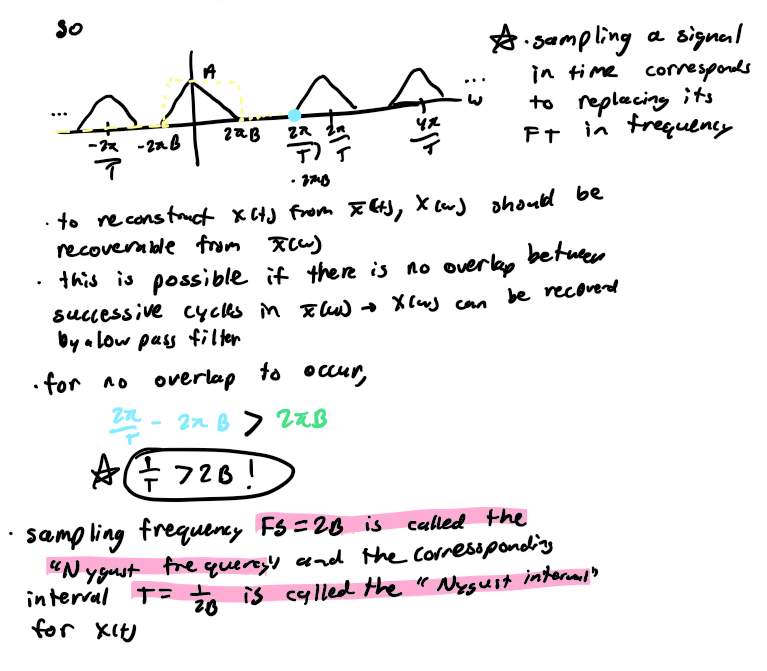
Nyguist Frequency
sampling frequency Fs = 2B
Nyguist Interval
interval T = 1/2B
Nyguist Interval in Plain Language
process of reconstructing a CT signal from its samples
Interpolation
the process of reconstructing a CT signal from its samples, amounts to lowpass filtering
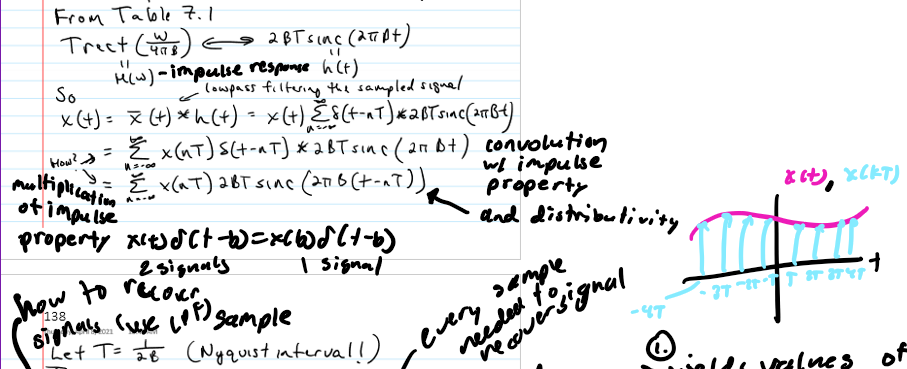
What happens in the time-domain?
x(t) = xbar(t)*h(t) = sum of - infinity to infinity of x(nT)*sinc(2piB(t-nT)) → interpolation formula
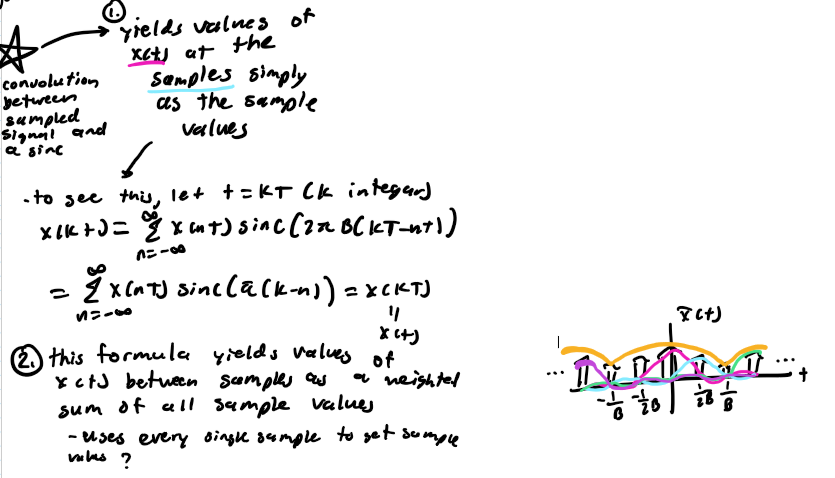
Interpolation Formula yields values of x(t)
yields values of x(t) at the samples simply as the sample values
this formula yields values of x(t) between samples as a weighted sum of all sample values (uses every single single to get sample values??)
x(t) at the samples simply as the sample values
let t=kT (k integar): x(kT) = sum of - infinity to infinity of x(nT)*sinc(pi(k-n)) = x(kT) = x(t)
2 Practical Difficulties w/ Interpolation Formula
if signal is sampled just above Nyguist rate (ws = 2pi/T = 4piB) then x(t) can only be recovered w/ an ideal LPF, which is not physically realizable
sampling theorem assumes that x(t) is bandlimited but all practical signals are time limited
Oversampling
make sample significantly greater than the Nyguist rate (triangle further apart) so well above 4piB
Practical Filter
w/ a finite width transition band could be used for interpolation; Fx > 2B is thus a theoretical limit
Timing-Scaling Property
implies that signals can’t be both of finite duration and bandlimited
What happens when practical signals that aren’t bandlimited, are sampled?
even if ideal interpolation were possible, the reconstructed signal would be unsatisfactory
Unsatisfactory because
loss of high frequency info, x(w) above pi/T rad/sec (losing tails) and reappearance of this “tail” within +- rad/sec (tails switch, called “aliasing/spectra folding”)
Aliasling/Spectra folding
when high frequency impersonate low frequencies; can be fixed with pre-filtering
Pre-filtering/anti-aliasfiltering
apply a LPF, x(t), prior to sampling to make it as bandlimited as possible
Summary
theory - bandlimited to BHz, Fs > 2B convolution w/ sinc
practice - LPF, x(t), to B before sampling Fs »2B
Sampling a CT Sinusoid
let x(t)=cos(wt) be sampled at T sec intervals; x[k]=x(kT)=cos(wkT)=cos(wTk) so x[k]=cos(omega k), omega=wT (normalized frequency) in rads
CT vs DT Sinusoids
CT - x(t) and unique for each w
DT - x[k] and not unique for each u
DT Sinusoid
of frequency, omega, is indistinguishable from a DT sinusoid of frequency, omega +- an integar of multiple 2pi; so can be expressed w/ omega between +- pi; since cos(omega k)=cos(-omega k) any real of this can be expressed w/ omega between 0 + pi; 0 is lowest frequency and pi is the highest
CT Sinusoid
must be sampled at a rate greater than 2 samples/cycle to avoid alaising
DT Signals
x[k]; defined only at integar values of time (t); has properties and special signals
DT Signal Properties
periodic/aperiodic (periodic if x[k]=x(k+No) for all k and integar No)
uni/multidimensional
energy/power/neither (integration in CT corresponds to summing in DT)
deterministic/stochasic
Special DT Signal
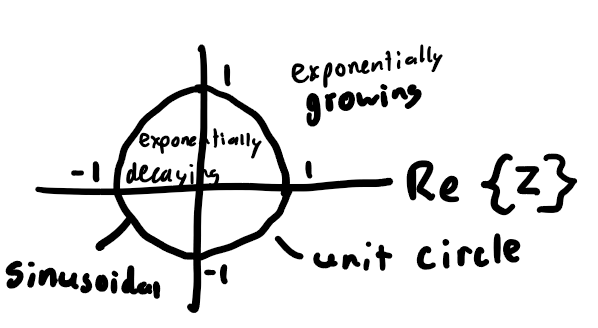
exponentially varying sinusoids (gamma^k)
|gamma| < 1: decays as k → infininty
|gamma| > 1: grows as k → infinity
|gamma| = 1: oscillates as k → infinity
these can be visualized in the complex (z-plane)
Analogies Between s-plane and z-plane
S: based on e^(st) where s is in cartesian coordinates
Z: based on gamma^k wheer gamma is in polar coordinates
S (LHP) ←> Z (within unit circle)
S (RHP) ←> Z (outside unit circle)
S (jw-axis) ←> Z (on unit circle)
Singularity Signals
entirely analogous to their CT counterparts but simpler; ex. DT step fcn and DT impulse fcn; summming plays a role of integrating in DT and differencing plays role of differentiating in DT

DT System Properties
same as CT
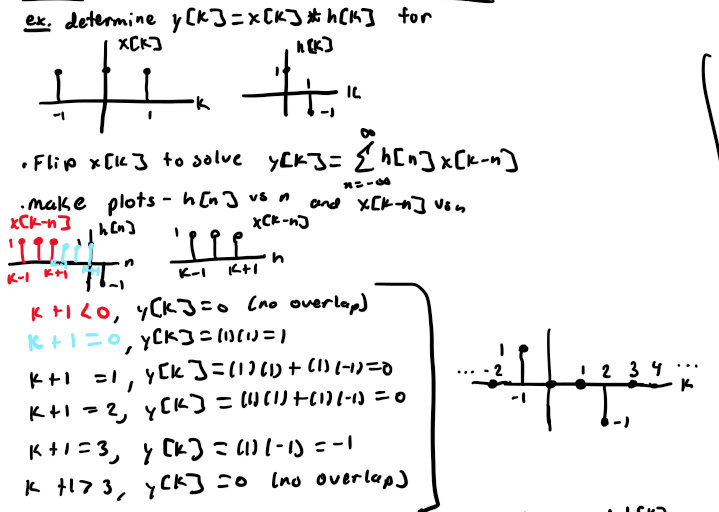
Time-domain Analysis of DT LTI Systems
very similar to CT but convolution is now a sum

Example
y[k] is N + M -1 Samples in Duration
in general, if x[k] is N samples in duration and h[k] is M samples in duration
LCCDEs
differential equations are difference equations in DT: a2 y[k-2] + a1 y[k-1] + ao y[k] = b1 x[k-1] + b2 x[k]; can be solved analogously (homogenous + particular or initial conditions or by recursion/iteration)
LCCDEs - Homogenous + Particular
yh[k] + yp[k]
LCCDEs - Initial Conditions
yZIR[k] + yZSR[k]
LCCDEs - Recursion/Iteration
How to determine the output of DT LTI systems using multiplication and not convolution?
represent DT signals as sums of exponentially-varying sinusoids and invoke lineraity
Z-Transform (ZT) Analysis of DT Signals and LTI Signals
a frequency-domain technique in which DT signals are representaed as sums of exponentially-varying sinusoids
Unilateral ZT of a DT Signal, x[k], is this complex form
x(z) = sum from k=0 to infinity of x[k]*z^(-k); z is a complex # for which the finite sum exists; exists for DT signals that grow no faster than an exponential
Z
a complex # for which the finite sum exists
ZT exists for DT Signals when
signals grow no faster than an exponential
Z^k instead of e^(zk)
“causal signals” that have a ZT have ROC outside some circle in the z-plane
Inverse ZT Equation
likewise a contour integral so PFE should instead be used for inverse transforming
ZT Properties
time convolution and right shift
Time Convolution
if x[k] ←> X(z) and h[k] ←> H(z), then x[k]*h[k] ←> x(z) H(z); useful for solving ZSR
Right Shift
if x[k] ←> X(z) then, x[k-1] ←> z^(-1) X(z) + x[-1] then x[k-2] ←> z^(-1) X(z) + x[-1] + x[-2]; useful for solving LCCDes (differences)
System Function, H(z), of a DT LTI System Parallels H(s)

Example
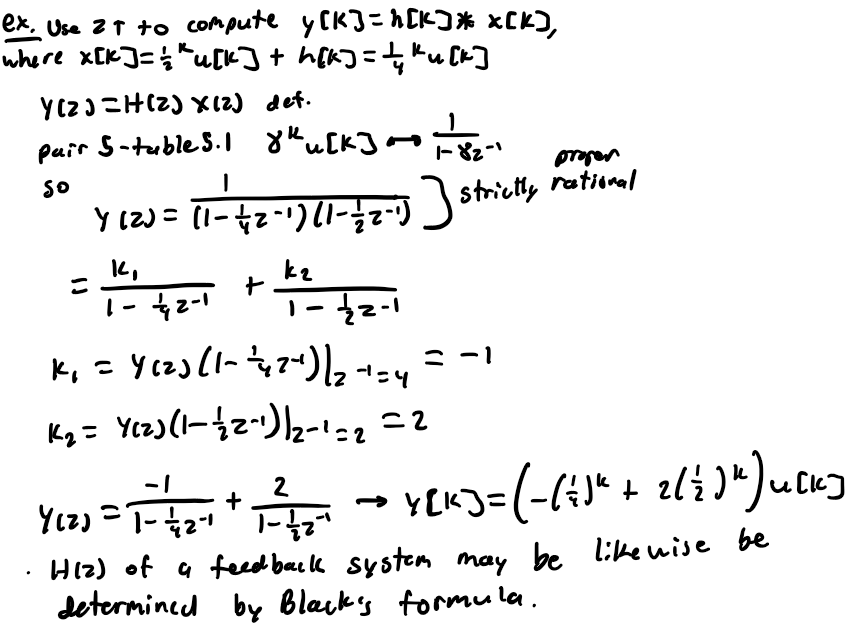
H(z) of a Feedback System
may be likewise be determined by Black’s formula
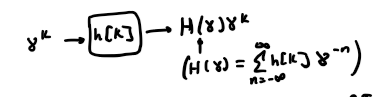
Frequency Response
input: x[k] = gamma^k (exponentially-varying sinusoid) where gamma = 1; y[k] = H(e^(jomegao))*e^(j omega k); Acos(omegao K + phi) → H(z) → A|H(e^jomego)|*cos(omegaok + phi + angle of H(e^jomegao))
H(e^(j omega)) as a fcn of omega
the frequency response of a DT LTI system
H(e^jomega)
evaulating H(z) around the unit circle in the z-plane; always a periodic fcn of omega w/ period 2pi (bc e^(jomega) = e^(j(omega + 2pi))
Frequencies in DT
lowest: 0
highest: pi
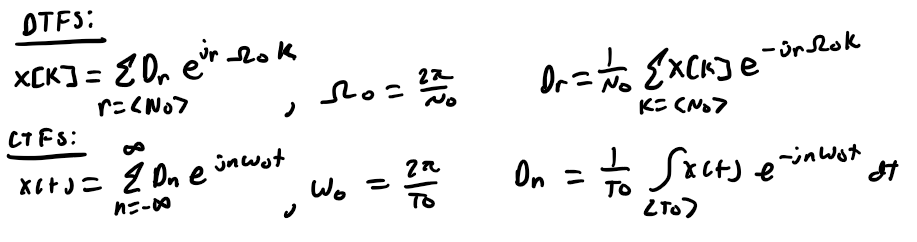
Discrete-Time Fourier Series (DTFS)
same as CTFS w/ 1 difference; since frequency range in DT is 2pi and harmonics are separated in frequency in omega naught = 2pi/No so only No harmonic
DTFS Line Spectra
(Dr vs r) will be periodic w/ period No and thus need only be plotted over -No/2 <= r < No/2
DTFS vs CTFS
DTFT for Representing Aperiodic Signals
a continum of frequency over 2pi interval for needed; X(omega) is a periodic fcn of omega w/ period 2pi
DTFT Spectra
X(omega) vs omega; continous plot but signal discrete plotted over -pi <= omega < omega
If x[k] real then
magnitude spectrum (|x(omega)| vs omega) and phase spectra (angle of x(omega) vs omega) will be even and odd respectively
What signals does DTFT exist for?
absolutely and square summable DT signals; power signals if impulse(omega) allowed in x(omega); DNE for growing signals
DTFT and ZT

DTFT of h[k]
of a causal, stable system is the frequency response
DTFT Properties
y[k] = h[k]*x[k] ←> Y(omega) = H(omega)X(omega) but, like the LT, the ZT is perferred for system analysis
Example of Impulse response
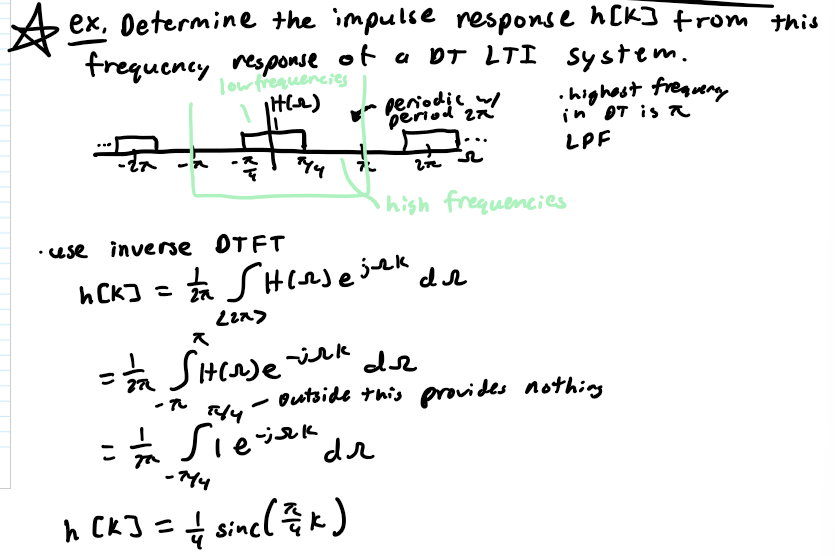
Ideal LPF is not what?
physically realizable
Practical Approach to Filter Design
windowing the sinc
CT vs DT
CT: t - continous, integrals, derivatives, e^st (jw-axis), w: - infinity → infinity
DT: k - integar, sums, differences, gamma^k (unit circle), omega (- pi → pi) (periodic)