MTH 267 - Differential Equation Final Exam Topics
1/53
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
54 Terms
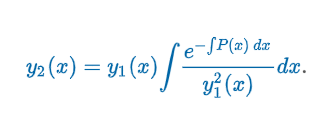
Reduction of Order
If y1 and y2 are linearly independent, then their quotient y2 ∕ y1 is nonconstant on I—that is, y2(x) ∕ y1(x) = u(x) or y2(x) = u(x)y1(x).
General Case:
“Let y1(x) be a solution of the homogeneous differential equation y″ + P(x)y′ + Q(x)y = 0 on an interval I and that y1(x) ≠ 0 for all x in I. Then (Image) is a second solution.
Note:
Drop the constant!
Wronskian w/ Reduction of Order
If is the y2 solution in the Reduction of Order Formula, then the functions y1(x) and y2(x) are linearly independent on any interval I on which is not zero.

General Solution - Homogeneous
Let y1, y2, …, yn be a fundamental set of solutions of the homogeneous linear -order differential equation on an interval I. Then the general solution of the equation on the interval is y = c1y1(x) + c2y2(x) + … + cnyn(x) where ci, i = 1, 2, …, n are arbitrary constants.”

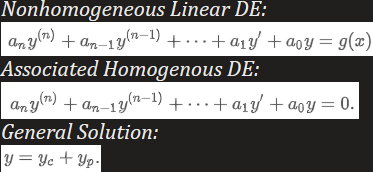
Nonhomogeneous General Solution
General Solution: y = yc + yp
yc : complementary function; general solution of the associated homogeneous DE
yp :any particular solution of the nonhomogeneous equation
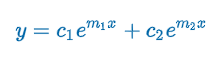
Case 1: Distinct Real Roots (Homogeneous Linear Equations with Constant Coefficients)
Criteria: m1 & m2 real & distinct (b2 - 4ac > 0)
am2 + bm + c = 0 has 2 real unequal roots m1 & m2 → linearly independent y1 = em1x & y2 = em2x
m1 = (-b + √(b2 - 4ac)) / 2a) & m2 = (-b + √(b2 - 4ac)) / 2a)
y = c1em1x + c2em2x
Case 2: Repeated Real Roots (Homogeneous Linear Equations with Constant Coefficients)
Criteria: m1 & m2 real & equal (b2 - 4ac = 0)
m1 = m2 → y1 = em1x & b2 - 4ac = 0 → m1 = -b/2a
Proof: y2 = em1x∫(e2m1x/e2m1x)dx = em1x∫dx = xem1x
m1 = (-b + √(b2 - 4ac)) / 2a) & m2 = (-b + √(b2 - 4ac)) / 2a)
m1 = m2 = -b/2a
y = c1em1x + c2em1x
Case 3: Conjugate Complex Roots (Homogeneous Linear Equations with Constant Coefficients)
Criteria: m1 & m2 conjugate complex numbers (b2 - 4ac < 0)
m1 & m2 are complex → m1 = α + iβ & m2 = α - iβ were α & β > 0 are real & i2 = -1
m1 = (-b + √(b2 - 4ac)) / 2a) & m2 = (-b + √(b2 - 4ac)) / 2a)

Equation 1 Worth Knowing (Homogeneous Linear Equations with Constant Coefficients)
k: real
DE: y” + k2y = 0
Auxiliary Equation: m2 + k2 = 0
Roots: m1 = ki & m2 = -ki
Solution: y = c1coskx + c2sinkx
Equation 2 Worth Knowing (Homogeneous Linear Equations with Constant Coefficients)
k: real
DE: y” - k2y = 0
Auxiliary Equation: m2 - k2 = 0
Roots: m1 = k & m2 = -k
Solution: y = c1ekx+ c2e-kx
Special Case: c1 = c2 = ½ → y = 1/2(ekx + e-kx) = coshkx
Special Case: c1 = ½ & c2 = -½ → y = 1/2(ekx - e-kx) = sinhkx
Alternative form: y = c1coshkx + c2sinhkx
Rational Roots (Homogeneous Linear Equations with Constant Coefficients)
We know that if m1 = p ∕ q is a rational root (expressed in lowest terms) of a polynomial equation anmn + … +anm +a0 = 0 with integer coefficients, then the integer p is a factor of the constant term a0 and the integer q is a factor of the leading coefficient an.
Method of Undetermined Coefficients
Limited to linear DEs such as nonhomogeneous linear DE where
the coefficients ai, i = 0, 1, …, n are constants &
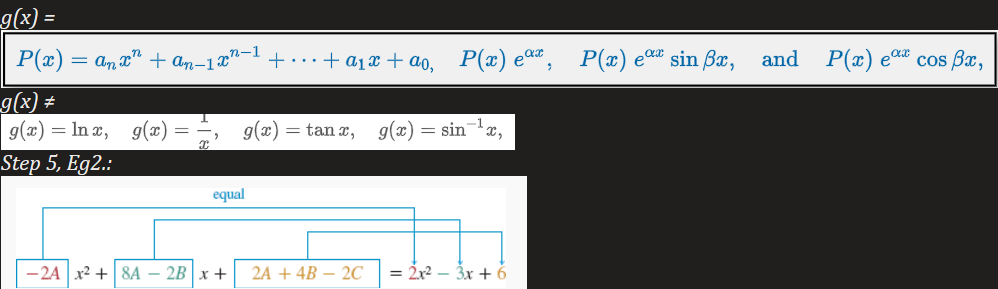
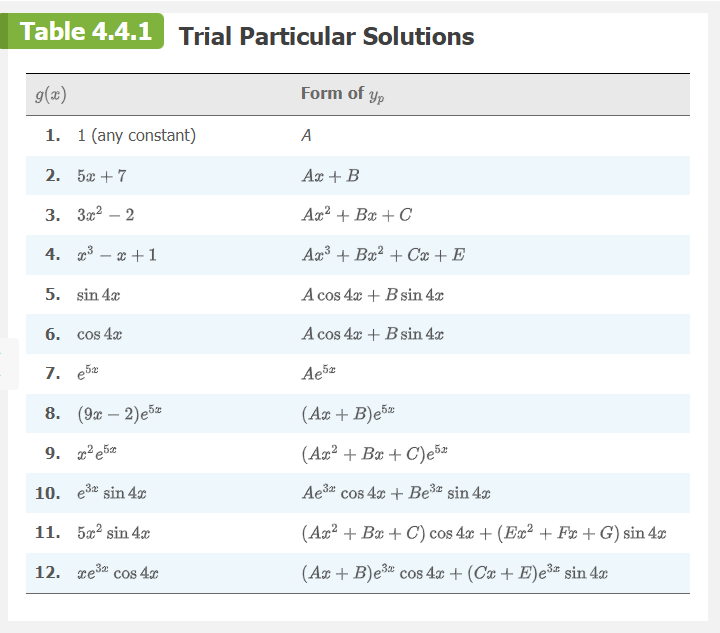
g(x) is a constant k, a polynomial function, an exponential function eαx, a sine or cosine function sinβx or cosβx, or finite sums and products of these functions. (Refer to image to what this means)
Steps:
1) Find yh
Characteristic Equation
Identify type of Homogeneous Linear Equations with Constant Coefficient
2) Choose a general yp
Look at RHS, the equation will include RHS & it’s derivatives
Refer to Trial Particular Solutions Flashcard
Eg. RHS = 3x2 → Ax2 + Bx + C = 0
3) Derive the general yp
4) Plug the derivatives into the DE
5) Match elements in LHS w/ elements in RHS
Eg1. LHS = 2A - 4Ax2 - 4Bx + 4C; RHS = 3x2 + 0x +1 → 2A + 4C = 0, -4B = 0, -4A = 3
Eg2. Refer to Image
Solve
6) Plug into yp
7) Write y = yh + yp
8) Check by plugging solution into DE
Superposition Principle for Nonhomogeneous Equations
yp = yp1 + yp2 +…+ ypn
(Apply this theorem when g(x) is a combination of allowable functions)
Trial Particular Solutions
No function in the assumed particular solution is a solution of the associated homogeneous differential equation.
The form of yp is a linear combination of all linearly independent functions that are generated by repeated differentiations of g(x).
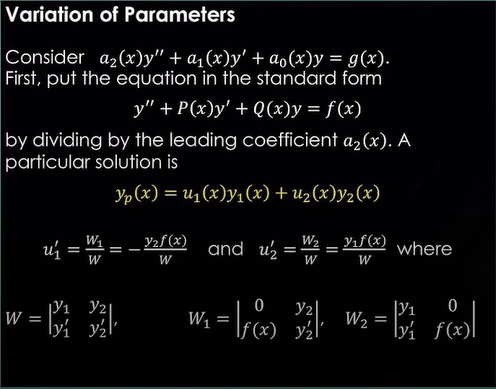
Variation of Parameters
Note: do not need to introduce new constants, solution method may involved integral-defined functions, particular solution may not be unique
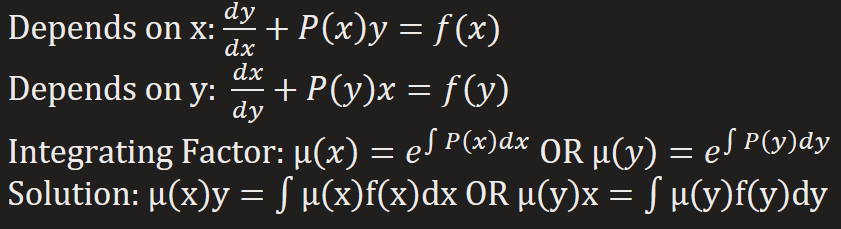
Linear 1st Order DE (Integer Factor)
Follows the linear general formula: a1(x)(dy/dx) + a0(x)y = g(x)
Steps:
1) Put into standard form; (dy/dx) + P(x)y = f(x)
2) Identify P(x) & find the integrating factor: μ = e∫P(x)dx
3) Multiply both sides of the standard form by the integrating factor. The LHS of the resulting equation is the derivative of the product of integrating factor & y.
4) Integrate both sides of the last equation.
5) If asked, solve for y
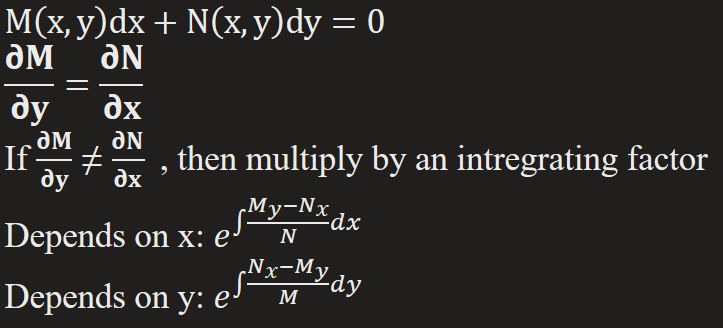
Exact 1st Order DE
Differential is continuous & has continuous 1st partial derivatives in R defined by a < x < b & c < y < d on some function f(x,y)
Steps:
1) Set in Exact Equation
Find the integer factor if necessary
2) Integrate w.r.t. x / Integrate w.r.t. y
3) Partial Differentiate w.r.t. y / Partial Differentiate w.r.t. x
4) Integrate h’(y) / Integrate g’(x)
5) Final answer = C
Separable 1st Order DE
can be separated as a product of a function of x & a function of y (can be linear or nonlinear)
Steps:
1) Separate y terms on the right & x terms on the left
2) Integrate
3) If asked, solve for y

Population Growth
“rate of population growth at a time is proportional to the population at that time”
P(t) = population at time (t)
k = constant of probability
P(t) = P0(t)ekt
Note: It is decay if k < 0.
Radioactive Decay
“the rate dA/dt at which the nuclei of a substance decay is proportional to the amount A(t) of the substance remaining at time t”
A(t) = A0e-kt
Newton’s Empirical Law of Cooling/Warming
“the rate at which temperature (temp.) of a body changes is proportional to the difference between temp. of body & ambient temp.”
T(t) = Tm + (T0 -Tm)ekt
T(t) = temp. of body at time t
Tm = ambient temp.
k = constant of probability
k > 0: warming
k < 0: cooling
Spread of Disease
“the rate dx/dt in which the disease spread is proportional to the number (#) of interactions between diseased people x(t) & unexposed people y(t)”

1st Order Chemical Reactions
“disintegration of a radioactive substance”
X(t) = amount of substance A at any time t
k = negative constant
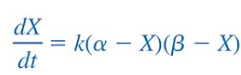
2nd Order Chemical Reactions
“disintegration of a radioactive substance”
X(t) = amount of C at time t
α = amount of A
β = amount of B
α - X = amount of A not converted to C
β - X = amount of B not converted to C
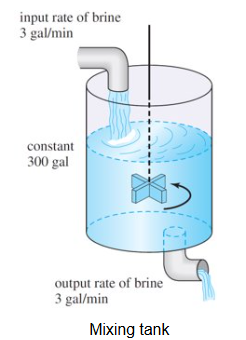
Mixture
“the amount of salt in a mixture of 2 salt solutions of differing concentrations”
A(t) = amount of salt in tank at time t
Rin = input rate of salt
Rout = output rate of salt
R = concentration * rate


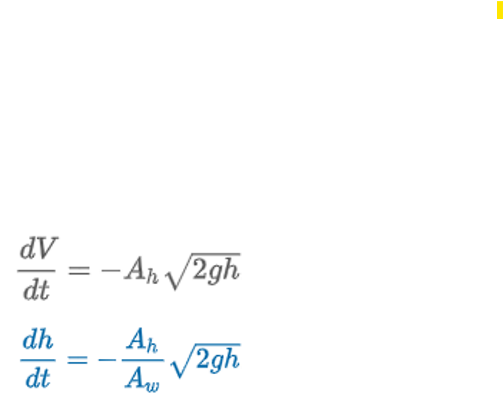
Draining a Tank
“Torricelli’s Law states that the speed of which a fluid flows out of a hole of a container is equal to the speed of it falling freely from the height of the fluid’s surface to the level of the hole.”
Ah = area (ft3) of hole
v = √2gh = speed (ft/s) of water leaving the tank
V(t) = Awh = volume of water leaving the tank at time t
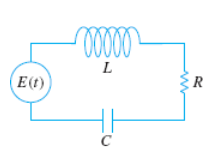
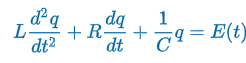
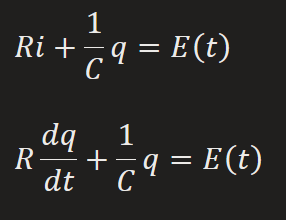
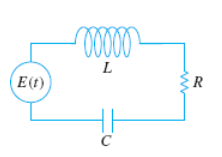
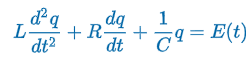
LRC Series Circuit
“Kirchoff’s 2nd Law states the impressed voltage E(t) in a closed loop equals the sum of the voltage drop.”
E(t) = impressed voltage
i(t) = current in closed circuit
q(t) = charge incapacitor at time t
L = inductance
R = Resistance
C = Capacitance
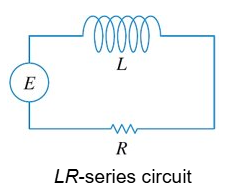
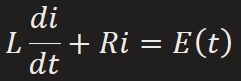
LR Series Circuit
E(t) = impressed voltage
i(t) = current in closed circuit
q(t) = charge incapacitor at time t
L = inductance
R = Resistance
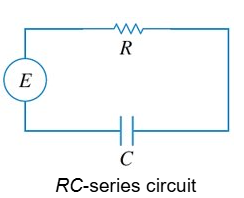
RC Series Circuit
E(t) = impressed voltage
i(t) = dq/dt current in closed circuit
R = Resistance
C = Capacitance
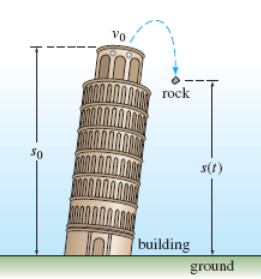
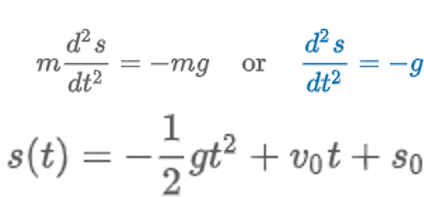
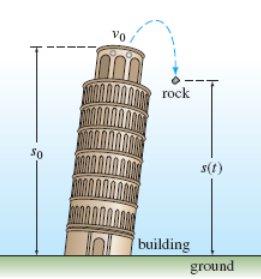
Falling Bodies
“Newton’s 1st law states a body in motion remains in motion & a body at rest remains at rest unless acted upon by a force. Newton’s 2nd Law states Force = mass * acceleration.”
s(t) = height position of falling object (obj.)
d2s/dt2 = acceleration of falling obj.
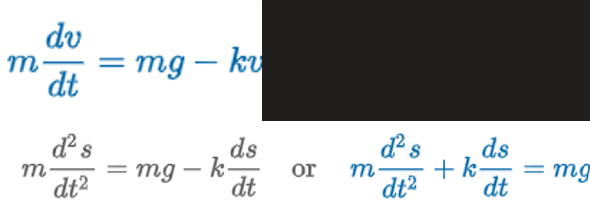
Falling Bodies w/ Air Resistance
“when air is proportional to velocity”
mg = F1 = W
-kv = F2 = viscous damping
W = weight
m = mass
g = gravity
s(t) = distance body falls
ds/dt = v = velocity
d2s/dt2 = dv/dt = a = acceleration
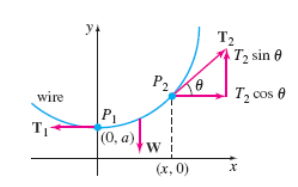
Suspended Cables
“3 forces act on the cables - tension T1 (tangent to P1), tension T2 (tangent to P2), & Weight W (between P1 & P2)
T1 = cosθ
W = T2sinθ
tanθ = W/T1

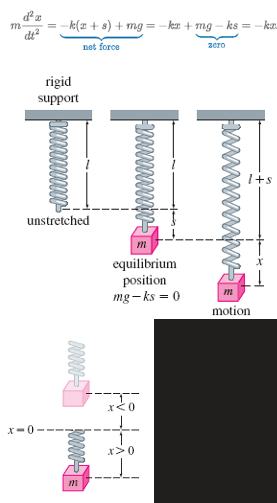
Newton’s 2nd Law
m(d2x/dt) = -k(x + s) + mg = -kx +mg - ks = -kx
F1 = -k(x+s) : restoring force
W = mg: Weight = mass*acceleration
mg = ks or mg -ks = 0: condition of equilibrium (stretched- elongation/compression)
x(t): displacement where x = 0 is the equilibrium position, above is negative, below is positive
F = ma: Force = mass* acceleration
a = d2x/dt2: acceleration
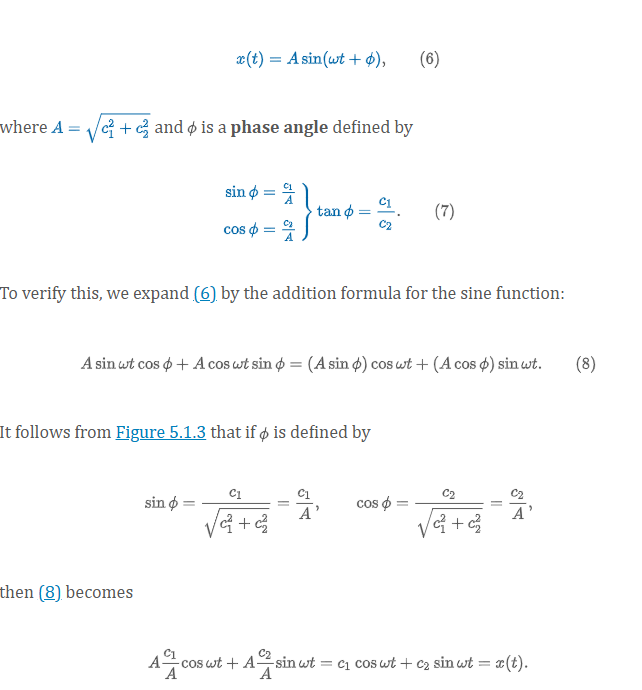
Free Undamped Motion - Alternative Form of x(t)
amplitude A
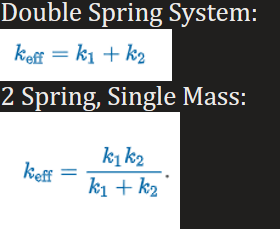
Effective Spring Constant
Spring/Mass Systems: DE of Free Damped Motion
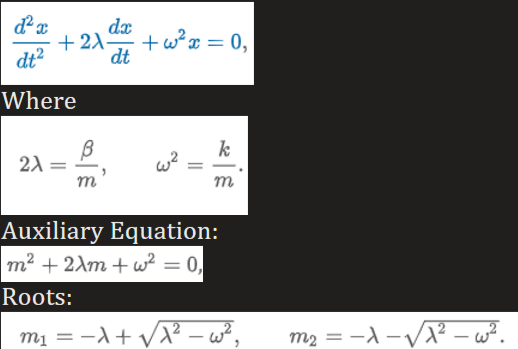
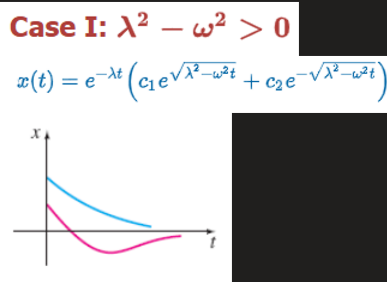
Case 1: Overdamped
Case 2: Critically Damped

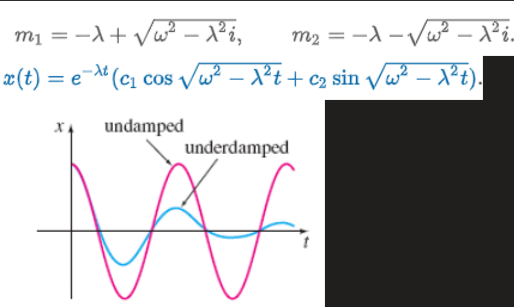
Case 3: Underdamped
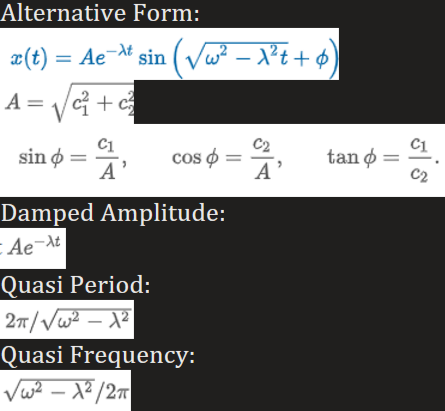
Free Damped Motion - Alternative Form of x(t)
amplitude A
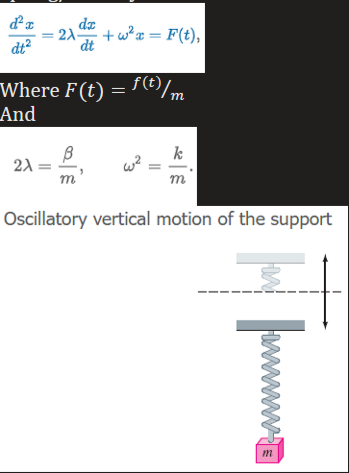
Spring/Mass Systems: Driven Motion with Damping
Take into consideration an external force f(t) acting on a vibrating mass on a spring.
Note: when F is a periodic function, it is considered a transient term; in other word, yc = transient term, yp = steady-state term
Spring/Mass Systems: Driven Motion without Damping
With a periodic impressed force and no damping force, thereis no transient term in the solution of a problem.

LRC Series Circuit
“Kirchoff’s 2nd Law states the impressed voltage E(t) in a closed loop equals the sum of the voltage drop.”
E(t) = impressed voltage ~ external force, f(t)
i(t) = current in closed circuit
q(t) = charge incapacitor at time t
L = inductance ~ mass, m
R = Resistance ~ damping constant, b
C = Capacitance ~ spring constant, k
E(t) = 0: electrical vibration of the circuit are free
E(t) > 0: electrical vibrations are forced
R ≠ 0, qc(t) = transient solution, qp(t) = steady-state solution
general solution contains the factor e-Rt/2L
the capacitor is charging and discharging as t→∞ (simple harmonic)
E(t) = 0 & R = 0: undamped, electrical vibrations fo not approach 0 as t increases without bound
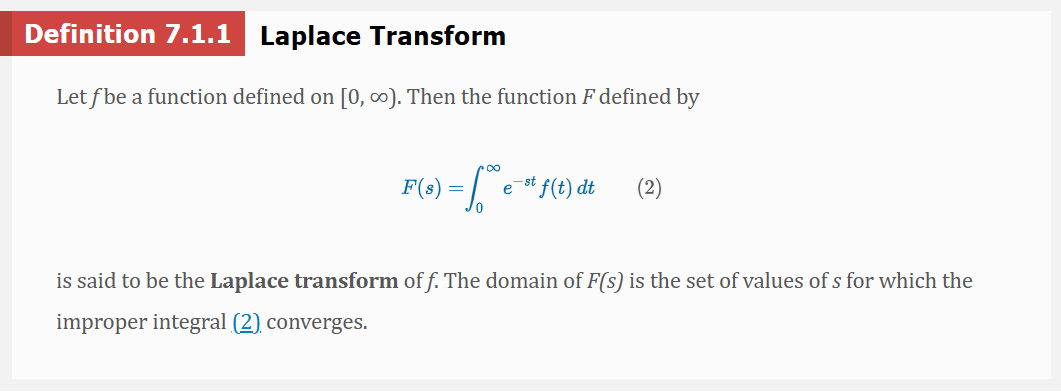
Laplace Transform
Note: also denoted as ℒ{f(t)}
Application: use a lowercase letter to denote the function being transformed and the corresponding capital letter to denote its Laplace transform
ℒ{f(t){ = F(s)
ℒ{g(t){ = G(s)
ℒ{g(i){ = I(s)
Linear Transform
“Suppose the functions f and g possess Laplace transforms for s > c1 and s > c2 , respectively. If c denotes the maximum of the two numbers c1 and c2 then for s > c and constants α and β we can write…”

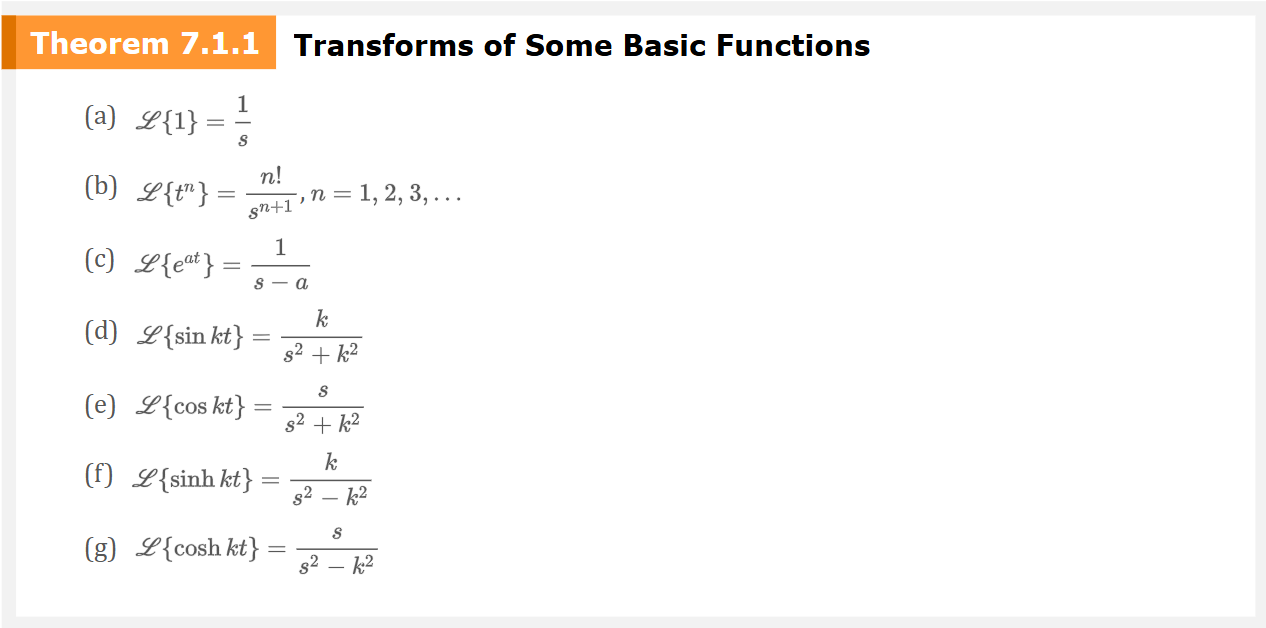
Transform of Basic Functions
Existence of ℒ{f(t)}
“Sufficient conditions guaranteeing the existence of ℒ{f(t)} are that f be piecewise continuous on [0, ∞) and that f be of exponential order for t > T.”
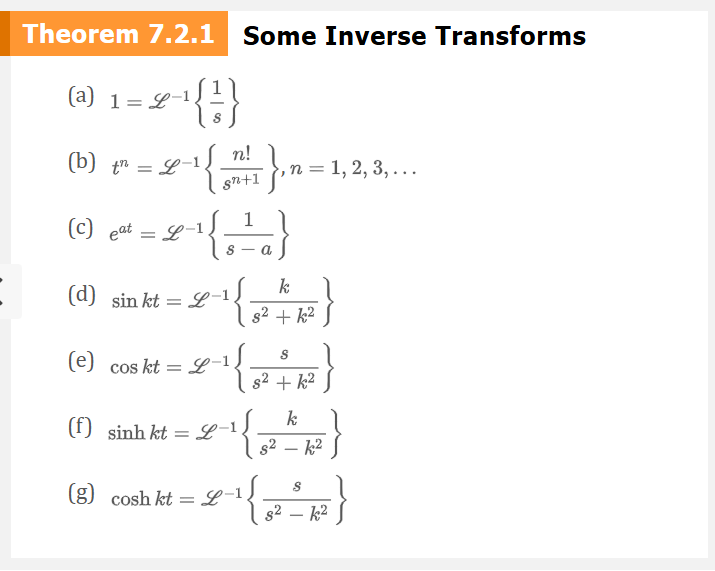
Inverse Laplace Transforms
Since ℒ{f(t)} = F(s), then f(t)=ℒ-1{F(s)}
Some Inverse Transforms
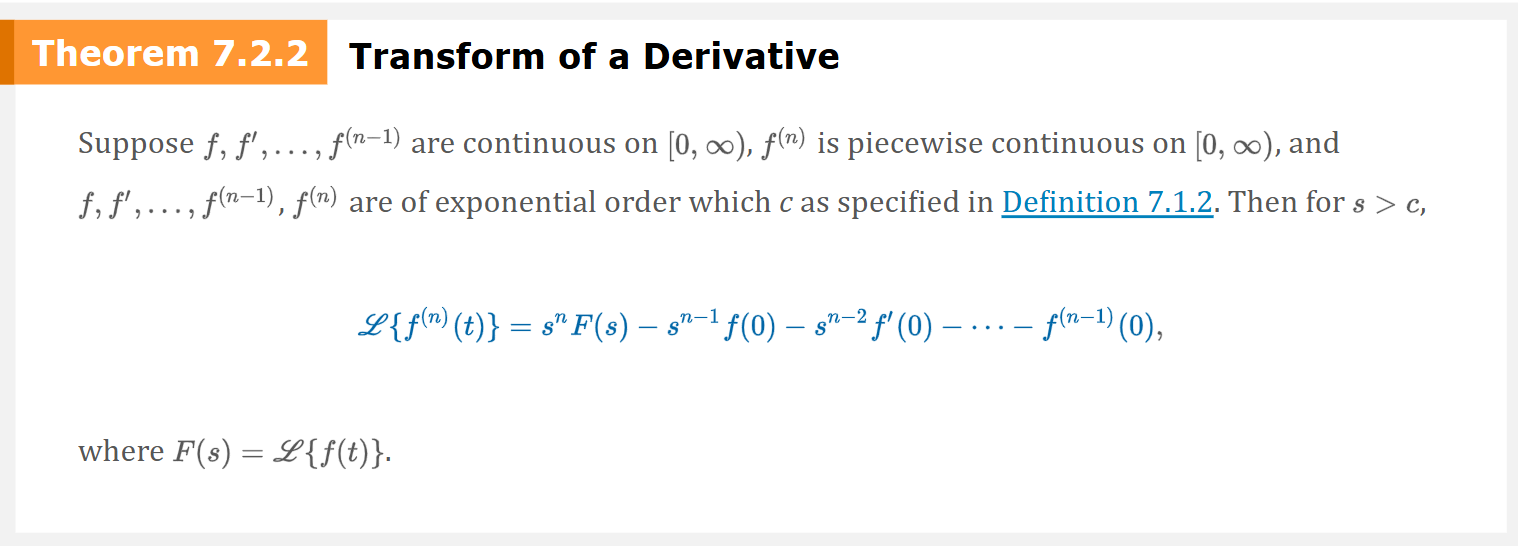
Transforms 1st Derivative

Transforms 2nd Derivative

Transforms 3rd Derivative

Transform of a Derivative (Theorem)
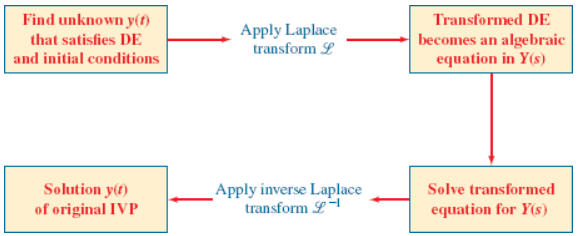
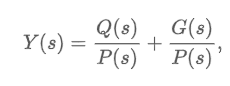
ODE w/ Laplace Transforms
The Laplace transform of a linear differential equation with constant coefficients becomes an algebraic equation in Y(s).
P(s) = ansn + an-1sn-1 + … + a0
Q(s) = polynomial in s of degree less than or equal to n - 1 consisting of various products of the coefficient, a1, i = 1, …, n and the prescribed initial conditions y0, y1, …, yn-1
G(s) = Laplace transform of g(t)
y(t)=ℒ-1{Y(s)}
Steps in solving an IVP by the Laplace transform