Modeling quizzes
1/88
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
89 Terms
Quiz 1
Intro concepts, Iteration, convergence, residual, FD,TE,RO
Iteration (Loop
x1 =1/2 (x0+ r/x0)
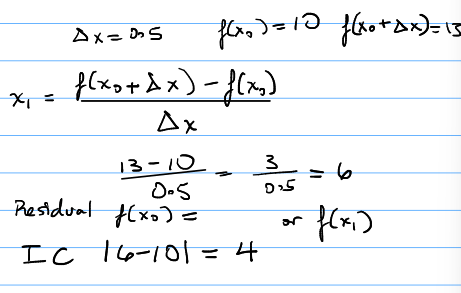
Residual
f(xi)=ans or |f(xi+1)|=TOL
Fixed point
Integer
Floating point
Real
Round off error
Finite accuracy which stores real numbers (storage error) Finite accuracy of arithmetic inherent error (arithmetic error)
Iterative convergence
|x1-x0|=ans
Emachine
smallest number you can add or subtract and still find a difference
Forward difference example
Truncation error
Due to approximations used to represent exact mathematical operations and quantities. We cant actually use an infinite number of terms.
Quiz 2
Data representation and bisection
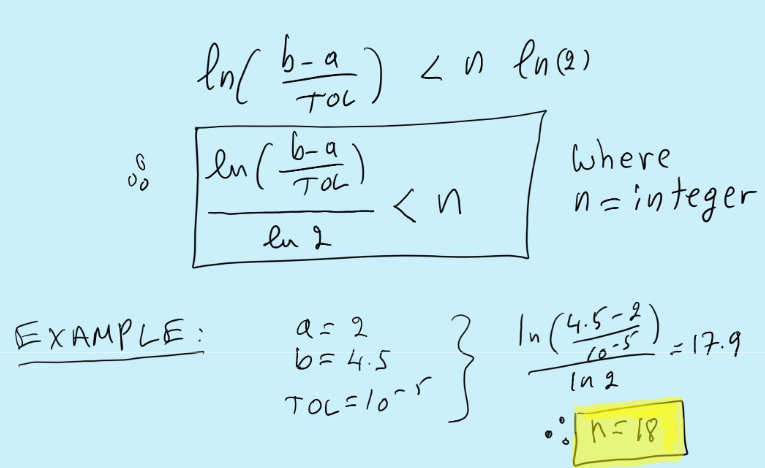
Bisection
departs from premise that [a,b] brackets a simple root in between a and b which is p of f(x)
Bisection steps
chk midterm by p1=a+b/2
if |f(p1)<TOL
yes then stop; no keep going
if root is less than p1 then [a,p]
If its greater than p1 then [p,b]
+ then x>0, 0 then x=0, - then x<0
sign f(a)*sign(f(p1) < 0
IEEE (Institute for electrical and electronics engineers)
Sign bit, characteristic, mantissa, bias is set by the computer when precision is declared.
c>b t is pos
c<b t is neg
t=c-b
Single Precision integer
16 bits
Largest possible integer +- 32, 767
Double Precision integer
32 bits
Largest possible integer +- 2,147,483,647
Double precision real
64 bits
Largest number is 2047 and bias is 1023
smallest number 10-308 which is zero in double precision corresponds to zero in c and f
largest number 10308 corresponds to 1 in c and f
any attempt to make any smaller than +-10-308 it just resets to that and its not fatal (real underflow error)
any attempt to make any larger than +- 10308 it is a fatal error (real overflow error) NAN

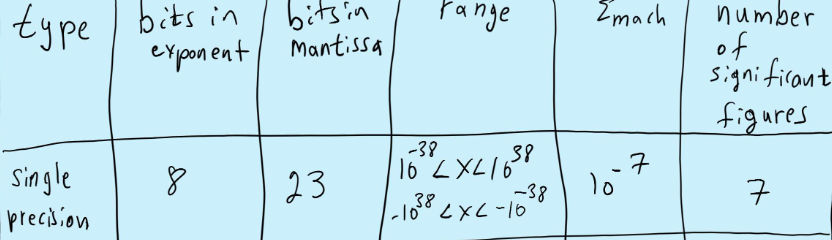
Single precision real
32 bits
Largest number is 255 and bias is 127
smallest number corresponds to zero +-10-38
largest number corresponds to one +-1038
any attempt to make any smaller than +-10-38 it just resets to that and its not fatal (real underflow error)
any attempt to make any larger than +- 1038 it is a fatal error (real overflow error) NAN
ex
x=-39.9
(-39.9)10=-1.00111111100110011×25
b=127
t=c-b
c=t+b
=5+127
=132
(132)10=(10000100)2
Putting in binary
1 is odd and 0 is even
For just a number like 25 just divide by 2 till you get to 1
and for a decimal like 0.2 just multiply by 2 till you get to the amount needed (most likely given in the question)
Ex
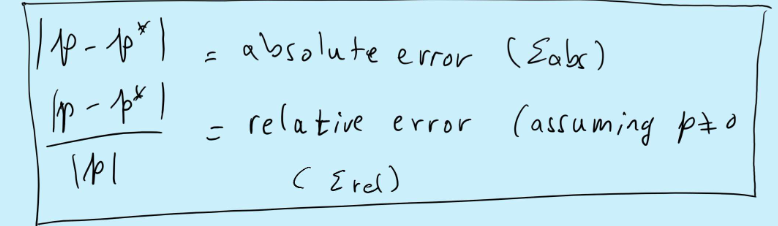
Error abs and relative
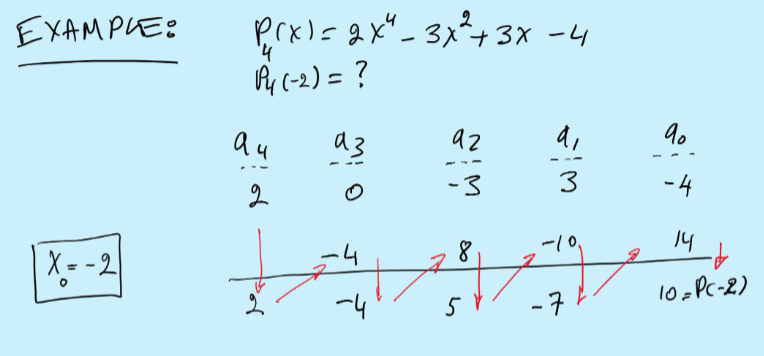
Horner’s Method
It can be used for both 1st and 2nd derivatives, It’s used to reduce round off error, and it can be applied to polynomials with complex arguments.
Quiz 3
fixed point, Newton-Raphson,Gauss elimination
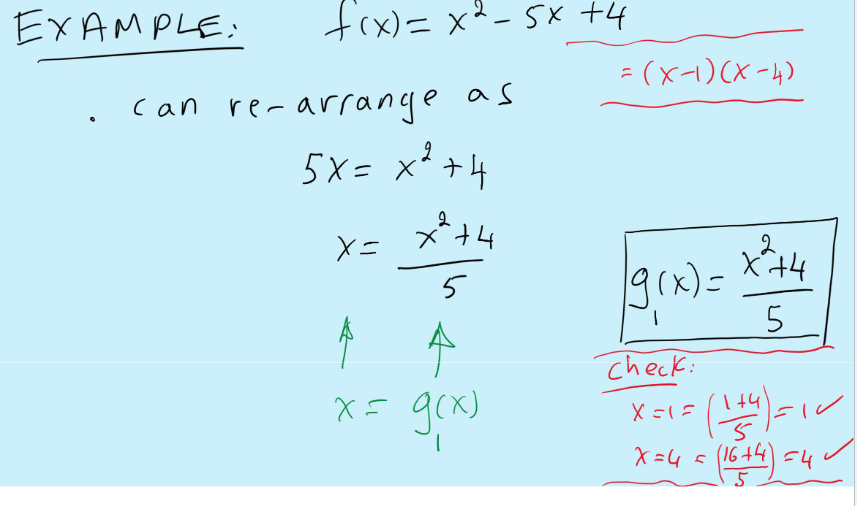
Fixed point
Used for iterative solution of linear system of equations to solve f(x)=0 and then rearrange somehow in the form of x=g(x)
You’ll start with an initial guess then iterate
x1= g(x0)
x2= g(x1)
x3= g(x2)
…
xn+1=g(xn)
ex
You can rearrange it other ways too
To find when fixed point iteration converges
You need to use intermediate value theorem for derivatives.
Fixed Point Theorem
A sufficient but not necessary condition for the fixed point iteration. Provides a convergence criteria basically.
x=g(x)
to converge is that
|g’(xn)|<1 for n=0,1,2,…
We can use it to check the initial guess
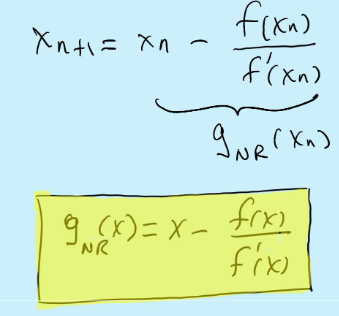
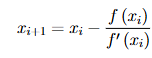
Newton-Raphson
Method requires: f(x) and f’(x)
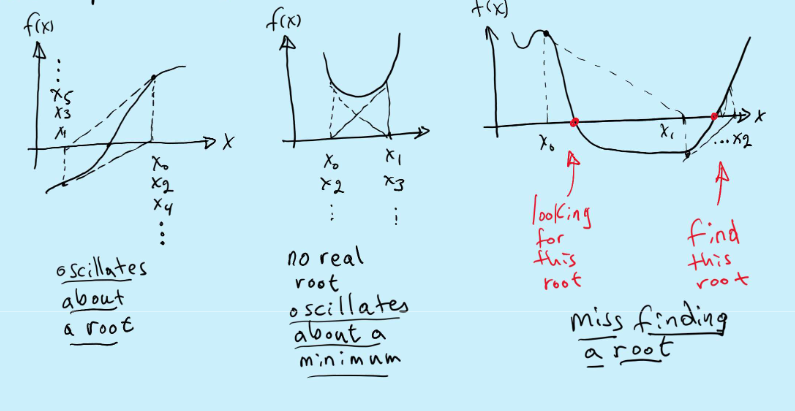
converges “very fast” when it converges
diverges “very fast” when it diverges
a general way to find a fixed point form for any f(x) or geometrically
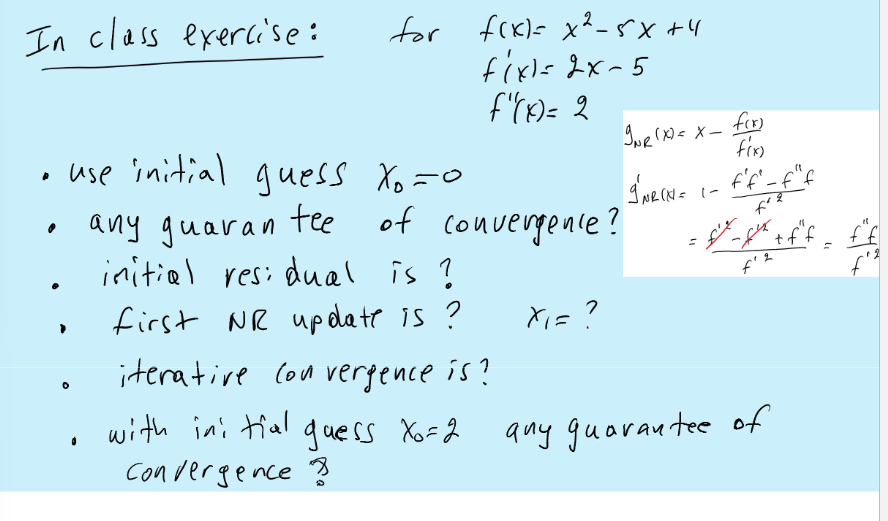
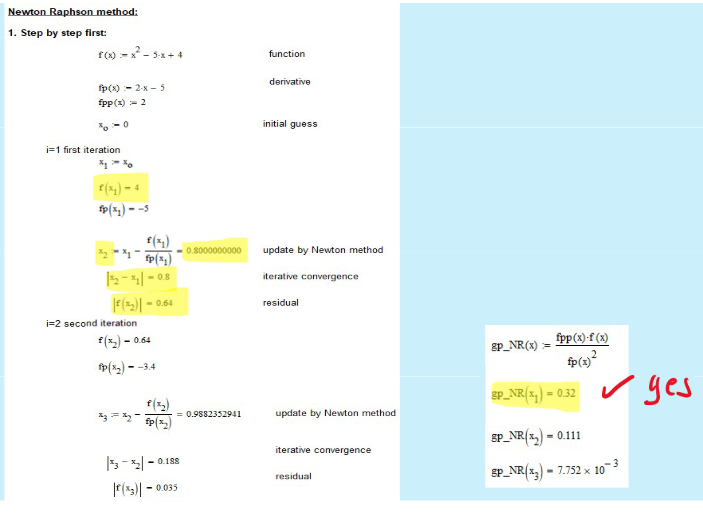
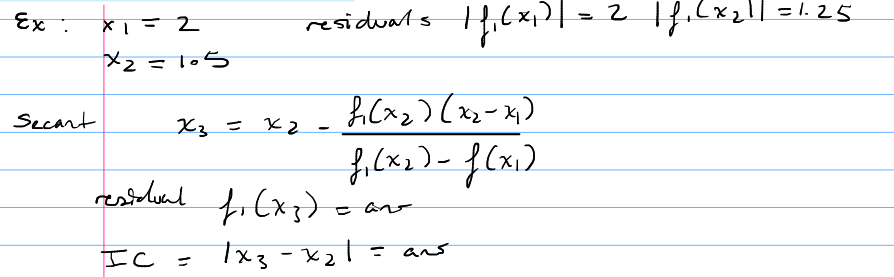
NR example
Only one initial guess
Do residual, do the 1st update
Then the residual of that |f1(x2)|=ans, then iterative convergence |x2-x1|=ans
Geometric interpretations
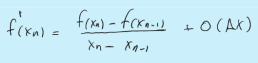
Secant Method
Approximates f’(xn) in the NR by a backward finite difference generate iteration.
Secant Method ex
Needs two initial guesses, do residuals for both guesses, then do the 1st update, residual from that answer then the iterative convergence.
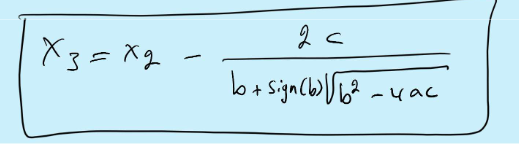
Muller’s method
Extension of secant method
Good method for complex roots
Rate of convergence is K=1.84
Requires 3 initial guesses
Assume a quadratic and use this formula to find x3 and solve the quadratic
To avoid RO error if b2»4ac express result in an alt manner
Chk residual, update solution and we use them to find x4 and etc
Finding roots of
initial guess
count the number of iterations to convergence
replace the location of the initial guess with the number of iterations
plot the result
Ex of the roots

End of 1st exam material
yippee
Small system of equations
N < 2,000
Use direct methods and N is limited by R.O
Large system of equations
N > 2,000
Use iterative methods. No limits on N
Gauss elimination
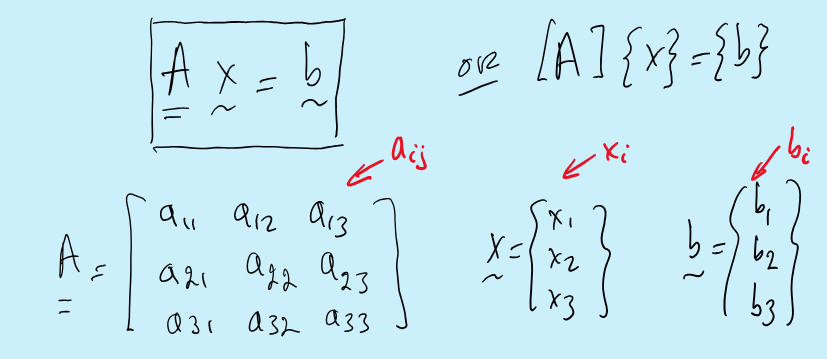
Its how we solve Ax=b
rearrange exactly using ERO’s Ax=b into an upper triangular form where we can find easily
det(A)
solution of Ax=b
FVM and FEM
Finite Volume Methods and Finite Element Methods
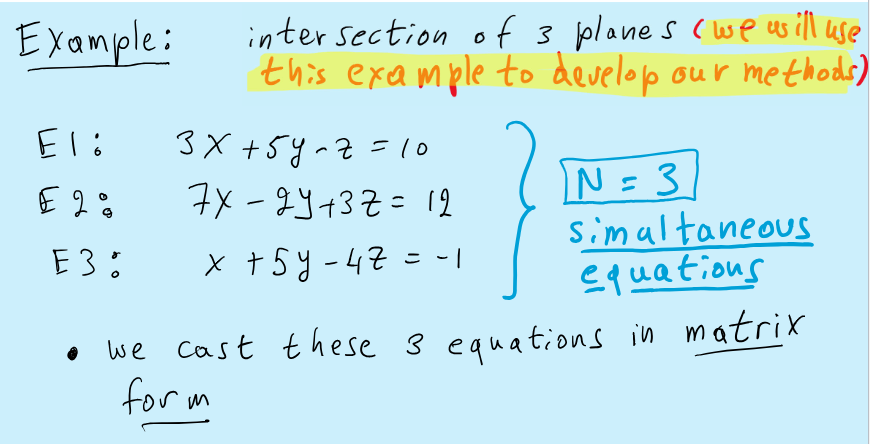
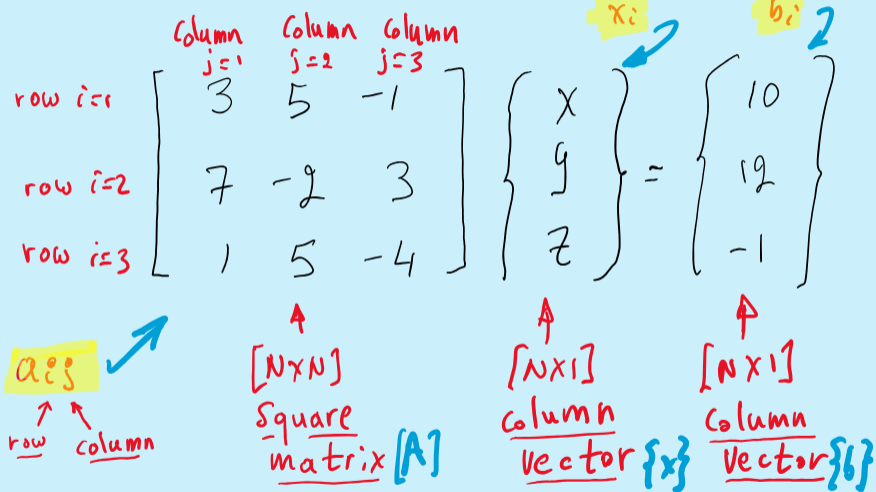
We write the equations as Ax=b
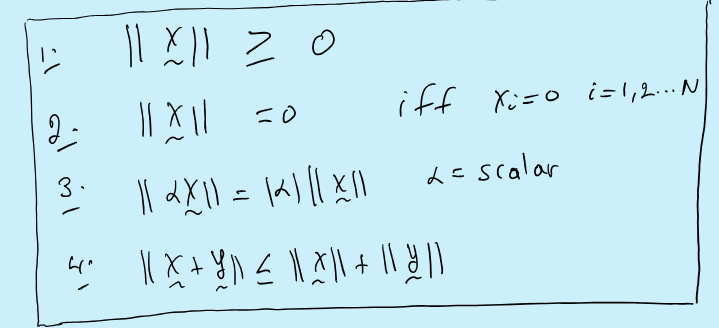
Vector norms and properties
Measures of size of vectors
||x||
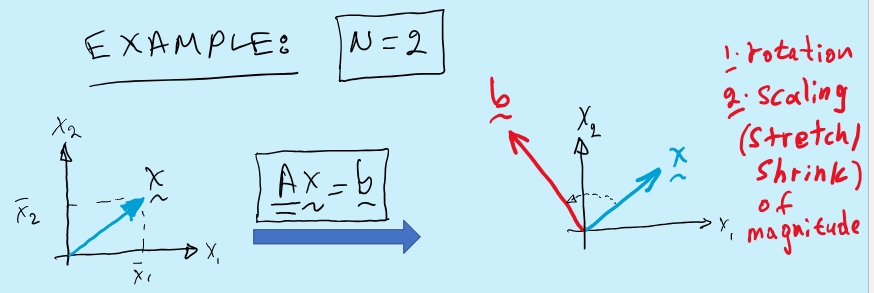
a[NxN] matrix operates on an [Nx1] vector and produces another [Nx1] vector
a linear transformation
To be able to solve a1 and a2 must be linearly independent
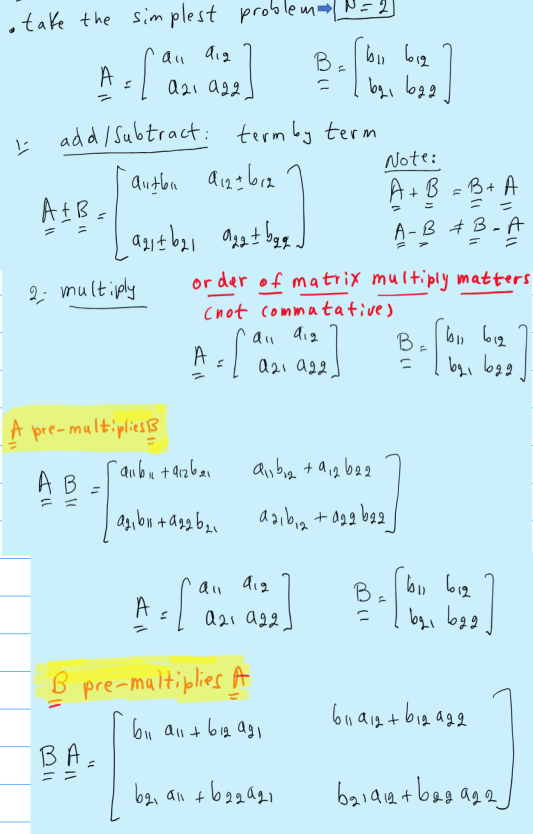
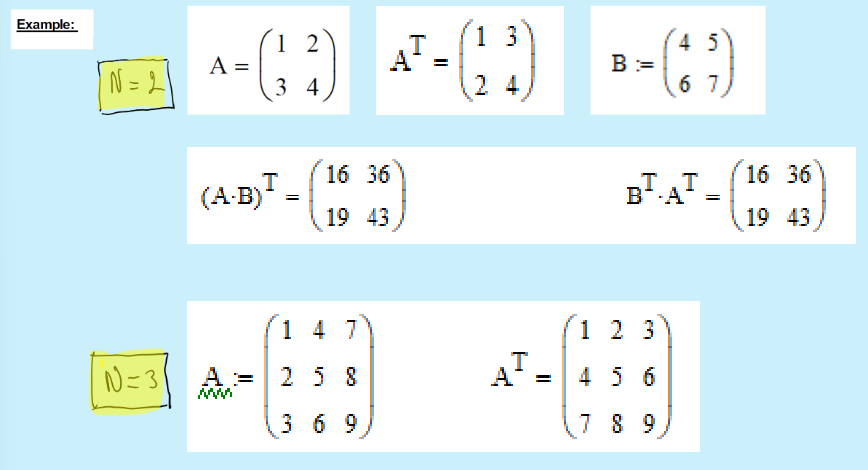
Matrix Operations
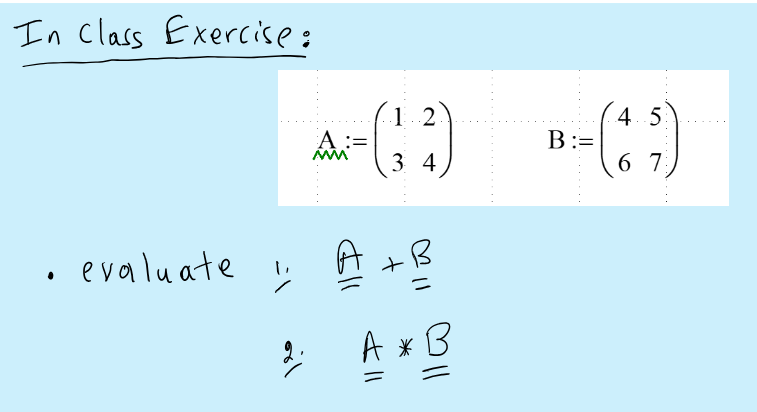
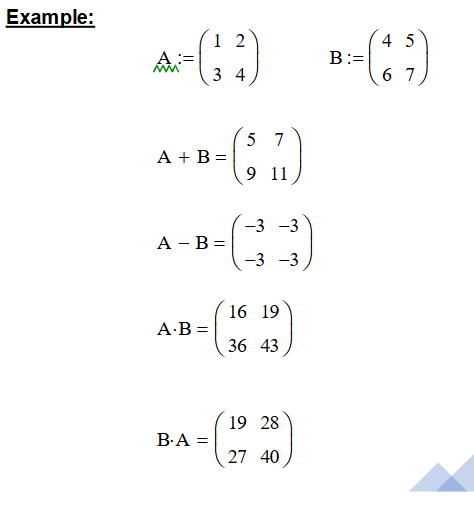
Example
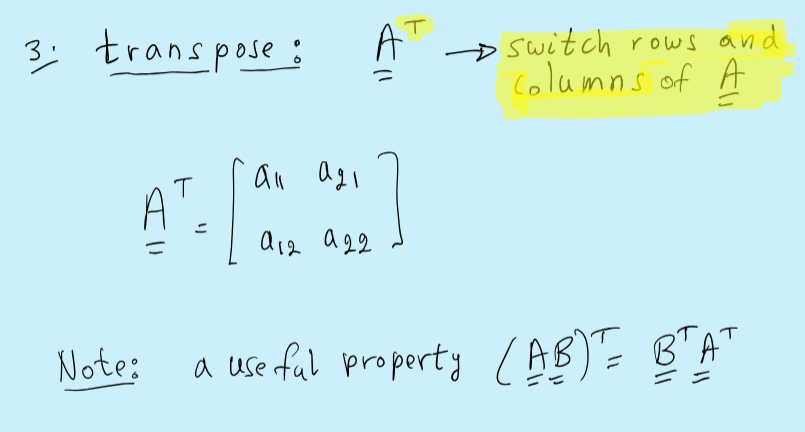
Transpose
Example
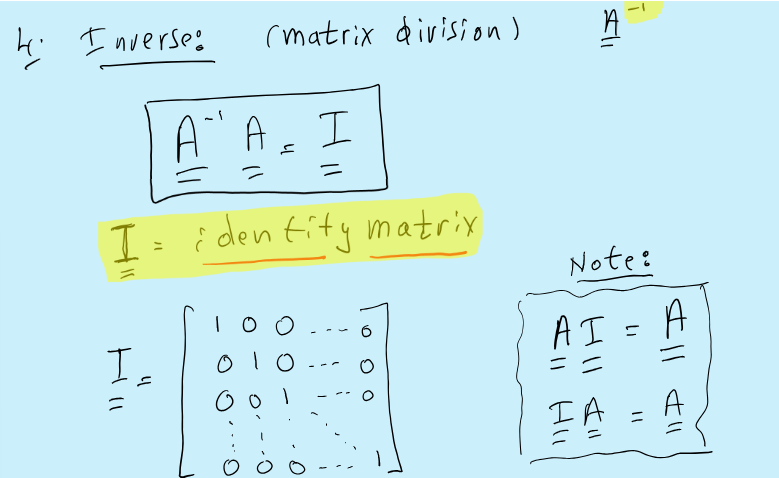
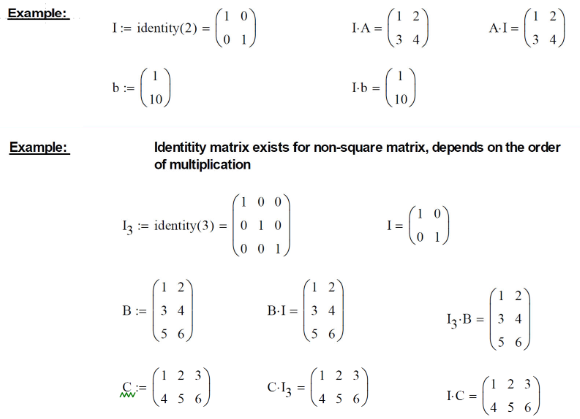
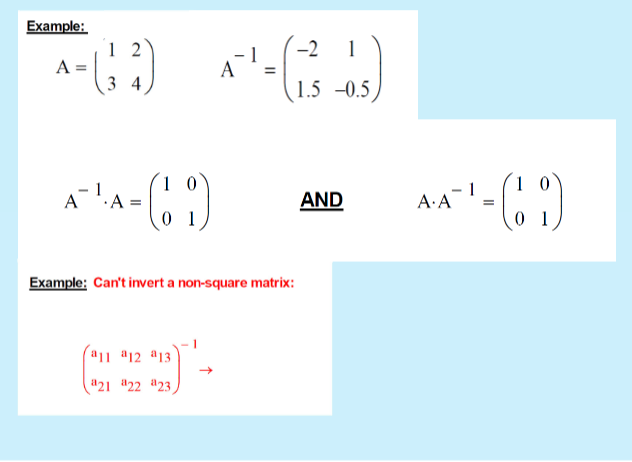
Inverse
Extra example
Useful Property
(AB)-1= B-1A-1
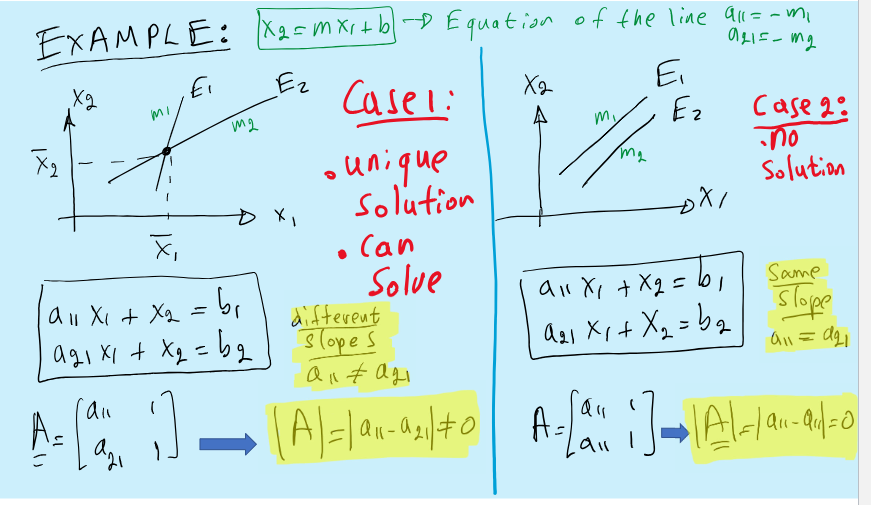
Can you always solve Ax=b
No, you can only solve if A-1 exists and this is assured if the determinant is not zero
|A|≠0 or det(A)≠0
Determinant refresher
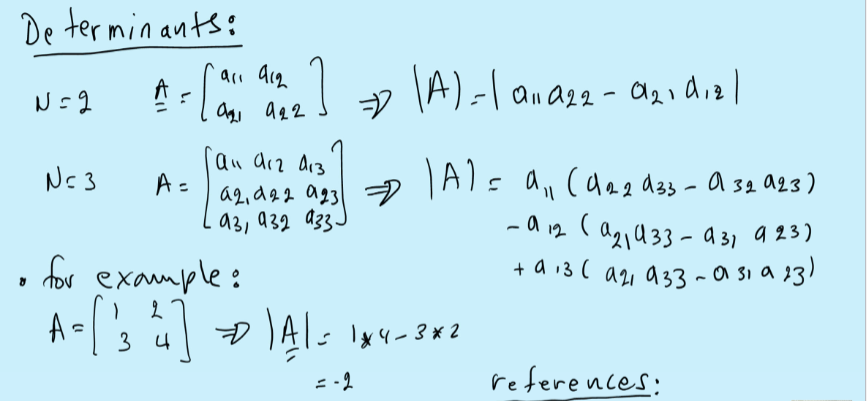
Ex:
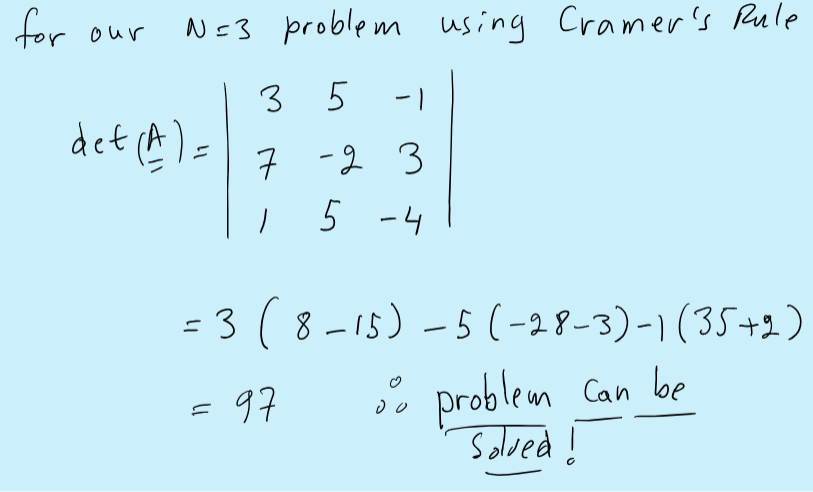
Cramer’s Rule
Legit take the det(A)
For larger N, Cramer’s rule isnt practical it takes N! floating point operations
Ex using cramer’s rule
ERO’s
Used to rearrange in a form where the determinant can be calculated
multiply row by non-zero constant (scaling which scales determinant)
add multiple of one row to another row (rotation about root)
switch two rows (reorder the way equations are written change the sign of the determinant by -1)
Quiz 4
Pivoting, LU, Jacobi, Gauss Seidel, Iterative methods
The following matrix
| 0.2 -3 2 |
| 1 10 7 |
| 2 1 -8 |
will require pivoting when solved by Gauss Elimination
is not diagonally dominant
Faced with the following coefficient matrix of a system of equations to be solved by Gauss elimination methods
| -15 2 1 |
| -5 -12 1 |
| -5 7 -19|
will partial pivoting be required?
No, because the matrix is diagonally dominant
When factoring the NxN matrix [A] into its upper and lower [LU] factors
Crouts method set up the diagonal elements of [u] equal to one
Doolittle's method set the diagonal elements of [L] equal to one
Is exact except for round off error
The Thomas Algorithm
Can store and solve the problem on 4 vectors
Is used to solve tridiagonal systems of linear equations
Uses Crout's method to find the factors of the coefficient matrix [A]
The LU decomposition method applied to the linear systems [A][x] = [b] is assume that the matrix [A] is fully populated
Is used when the coefficient matrix [A] stays constant and there are multiple right hand sides [b] to solve
is a direct method of solution
is a method that takes O(N^3) floating point operations to solve the system of equations for the first right hand side vector [b] and subsequently takes O(N^2) for any new right hand side vector [b]
If a set of simultaneous equations [A][x] = [b] is solved by an iterative and [A] is 400x400 matrix and if it takes k = 10 iterations to coverage, then number of floating point operations to find of
1,600,000
If a set of simultaneous equations [A][x] = [b] is solved by an iterative and [A] is 200x200 matrix and if it takes k = 10 iterations to coverage, then number of floating point operations to find of
400,000
Iterative methods of solution for simultaneous equations include
Gauss - Seidel Iteration
Successive over relaxation (SOR)
Jacobi iteration
The system of equations
| 4 1 | {x1} = { 1 }
| 0 3 | {x2} = {5}
is solved by the Jacobi iteration and the solution vector after the 3rd iteration is
{x1}^2 = {1}
{x2} {1}
The residual norm is evaluated using the Linf norm as
4
When solving a linear system of equations by Jacobi iteration, given the following two vectors at iterations 2 and 3
{x}^2 = {0.27}
{ 0.1 }
{x}^3 = { 0.1 }
{ 0.2 }
Using the Linf norm the iterative convergence criterion is
0.17
The system of equations
| 4 1 | {x1} = { 1 }
| 0 3 | {x2} = {5}
is solved by the Jacobi iteration and the solution vector after the 3rd iteration is
{x1}^2 = {2}
{x2} {2}
The residual norm is evaluated using the Linf norm as
9
Gauss Elimination
The process of using row operations to transform a linear system into on whose augmented matrix is in row echelon form.
Quiz 5
Faced with the following coefficient matrix of a system of equations to be solved by iterative methods
| -5 2 1 |
| -5 -12 14 |
| -5 7 -19 |
Do you have any guarantee that you will obtain a solution?
No, because the matrix is not diagonally dominant
The eigenvalues of a matrix are
ya = { 1.2 }
{ -1.56}
Then when [A] pre-multiplies any vector that is not an eigenvector of [A] then it will
Decrease its magnitude
Rotate the vector
The eigenvector [A] of the matrix [A] of the linear system of equations [A][x] = [b] satisfy the following equation
Note: Here (I) is the identity matrix. [A]^T is the transpose of [A] and y is a scalar value.
[A][/\] = y[/\]
If the conditioning number of the coefficient matrix [A] of a system of linear equations [A][x] = [b] is very high
SVD can be used to solve the problem approximately by discarding the nearly linearly dependent equations
There is a large uncertainty in the error and small residuals do not necessarily indicate an accurate solution
Numerical solutions are highly sensitive to input errors
The Linf norm (row sum norm) of the following matrix
| 2 -3 2|
| 1 -1 7|
| 2 1 2|
is evaluated as
9
With respect to the eigenvalues and eigenvectors of a matrix
Eigenvalues solve an Nth order polynomial for an NxN matrix
Eigenvalues are uniquely defined and are specifically associated with that matrix
Eigenvectors are not uniquely defined and are expressed equivalently up to an arbitrary multiple of each vector
The L1 norm (column sum norm) of the following matrix is evaluated as
| -21 -3 2|
| 1 -1 7|
| 2 1 2|
24
The eigenvalues of a matrix are
ya = { 0.2 }
{ 0.56}
Then when [A] pre-multiplies any vector that is an eigenvector of [A] then it will
Decrease the magnitude
Not rotate that vector
The matrix [A] that has a norm of ||A|| = 3.2x10^3 and the norm of the inverse of the matrix is ||A^-1|| = 2.5x10^12. If a solution is obtained for a system of equations [A][x] = [b] using this same matrix and double precision computations then
The solution is very sensitive to input error.
Small residuals do not indicate accurate answers.
The system is ill-conditioned.
Quiz 6
When applied to solving the system of non-linear equations
f(x) = 0
one step equivalent of the Newton Raphson method is
{x}^n+1 = {x}^n - [J({x}^n)]^-1 {f({x}^n}
When solving the simultaneous set of coupled non-linear equations {f(x)} = 0 by the Newton Raphson iterative method, the iteration is stopped when the residual criterion is met.
If the n+1th solution vector is {x}^n+1, then the residual stopping criterion is defined in terms of some appropriate vector norm || || and a user-supplied error tolerance TOL as:
|| f{x}^n+1 || < TOL
The Levenberg Marquardt algorithm
is a method that automatically combines steepest descent and the Newton Raphson algorithm for solving non-linear equations
The Jacobian Matrix [J] that arises in the Newton Raphson method for simultaneous non-linear equations {f(x)} = 0
Has entries Jij = parfi/ parxj
Must be updated at each iteration
Given the two simultaneous non-linear equations to be solved by the Newton-Raphson method
f1(x) = x1 - 2x1x2
f2(x) = 6x1-x1^3x2
and a current solution vector at the n+1 iteration
(x1)^n+1 = (2)
(x2) (2)
then the element J2,2 of the Jacobian matrix is evaluated as
-8
The Jacobian matrix evaluates for N = 10 simultaneous non-linear equations
has 100 entries of partial derivatives
can be approximately evaluated using finite differences
Given the two simultaneous non-linear equations to be solved by the Newton-Raphson method
f1(x) = x1 - 2x1x2
f2(x) = 6x1-x1^3x2
and a current solution vector at the n+1 iteration
(x1)^n+1 = (2)
(x2) (2)
then the element J1,2 of the Jacobian matrix is evaluated as
-4
When solving the simultaneous set of coupled non-linear equations {f(x)} = 0 by the Newton Raphson iterative method, the iteration is stopped when the residual criterion is met.
If the n-th solution vector is {x}^n+1, then the residual stopping criterion is defined in terms of some appropriate vector norm || || and a user-supplied error tolerance TOL as:
|| {x}^n+1 - {x}^n || < TOL