meccanica - TUTTO
1/139
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No study sessions yet.
140 Terms
cos’è la forza?
È un’interazione che può modificare lo stato di moto o la forma di un corpo.
spiega il primo principio di Newton
Anche detto legge d’inerzia, ci dice che esistono dei sistemi di riferimento INERZIALI per cui un corpo non soggetto a forze permane indefinitivamente nel suo stato di quiete o moto rettilineo uniforme.
spiega il secondo principio di Newton
spiega cosa succede se agiscono delle forze su di un corpo.
L’applicazione di una forza risulta alla variazione del moto del corpo, per cui comporta un’accelerazione o decelerazione.
Al moto però si oppone la massa inerziale, per cui l’accelerazione è direttamente proporzionale alla forza e inversamente proporzionale alla massa inerziale.
F = ma
Spiega in modo DEDUTTIVO il secondo principio di Newton
Posso vedere la relazione F = ma come un’equazione differenziale: F = m d2x/dt2
So che la soluzione di questa equazione è data dalla velocità e dallo spostamento iniziali, e che la forza dipende da spostamento, velocità e tempo. Conoscendo la forza in tutti gli istanti di tempo considerati posso determinare la legge oraria del corpo soggetto a tale forza.
spiega in modo INDUTTIVO la seconda legge di Newton
Conoscendo massa e accelerazione nel tempo, posso indurre la forza che causa tale spostamento. Ciò è stato fatto con le orbite dei pianeti di Keplero, con le quali Newton indusse la legge di gravitazione universale. Oppure con le perturbazioni del moto dei pianeti, che hanno portato Adams e Le Verrier a indurre la presenza di un’altro pianeta, Nettuno.
spiega il terzo principio di newton e un possibile equivoco
Se un corpo esercita una forza (azione) su di un corpo, esso eserciterà una forza uguale e contraria (reazione, 1° proprietà) lungo la stessa retta d’azione (2° proprietà).
Un possibile equivolo sarebbe: ma quindi niente si può muovere!
Prendiamo il caso di un blocco legato ad una fune, che viene tirata fino a far spostare il blocco. la forza esercitata dalla fune ha un punto di applicazione diverso da quella esercitata dal blocco, una si trova sulla fune e l’altra sul blocco. Quindi, considerando solo il blocco per esempio, abbiamo che la forza che agisce su di esso è solo quella della fune, e viceversa.
Cos’è il determinismo Newtoniano?
Il determinismo newtoniano afferma che conoscendo con esattezza lo stato iniziale di un sistema (cioè le posizioni e le velocità di tutte le particelle) e le leggi fisiche che lo governano, è possibile prevedere con certezza tutto ciò che accadrà in futuro, così come risalire a tutto ciò che è accaduto nel passato.
Data un’equazione m d2x/dt2 = F, date le condizioni iniziali x0 e v0 e nota F nel tempo, esiste una sola funzione x(t) che soddisfa l’equazione.
Quindi il futuro (e il passato) del corpo è completamente determinato.
Dimostrami la conservazione di quantità di moto
Parto da un punto P, a cui viene impressa una forza F. So che
p = mv
derivo
(*) dp/dt = m dv/dt = ma = F (per il secondo principio)
Se ho due corpi che interagiscono, per il 3° principio ho che (£)
F12 = F21
Per (*) F12 = dp1/dt, mentre F21 = dp2/dt
Allora, quando vengono sommate, d(p1 + p2)/dt = F12 - F21 = 0
Quindi la quantità di moto totale p = p1 + p2 è costante e si conserva nel tempo
dimostra la base fenomenologica della 1° proprietà del 3° principio di Newton
Si dimostra tramite la conservazione della quantità di moto durante un urto elastico.
dimostra la conservazione del momento angolare
dL0 /dt = d(OP x p)/dt = dOP/dt x p + dp/dt x OP = v x p + OP x F
dove
v x p = 0 perchè v//p
OP x F = Mo (momento della forza)
Quindi Mo = dLo/dt
considero Lo = Lo1 + Lo2
derivo:
d(Lo1 + Lo2)/dt = OP1 x F12 + OP2 x F21
che per il 3° principio sarebbe
(OP1 - OP2) x F12 = P1P2 x F12 = 0 perchè parallele
Quindi dL0 /dt = 0 → L0 totale si conserva
dimostra che Mo = dLo/dt
dL0 /dt = d(OP x p)/dt = dOP/dt x p + dp/dt x OP = v x p + OP x F
dove
v x p = 0 perchè v//p
OP x F = Mo (momento della forza)
Quindi Mo = dLo/dt
cosa dice il teorema di Noether?
Se un sistema ha una simmetria continua che dipende da n parametri, allora esistono n qantità fisiche associate che si conservano.
Con deboli assunzioni Noether trovò che la conservazione della quantità di moto è dovuta all’omogeneità dello spazio, mentre la conservazione del momento angolare è dovuta all’isotropia dello spazio.
differenza tra massa inerziale e massa gravitazionale?
La massa inerziale misura la resistenza di un corpo all’accelerazione quando sottoposto a una forza (F = mi·a).
La massa gravitazionale misura quanto un corpo subisce o produce forza gravitazionale (Fp = mg·g o legge di gravitazione universale).
Esperimenti mostrano che sono numericamente uguali (principio di equivalenza), per cui tutti i corpi cadono con la stessa accelerazione in assenza di attrito.
Considerazioni sulla forza peso?
La forza peso è la forza con cui la Terra attrae un corpo di massa m verso il suo centro:
P=mg
È diretta verso il basso (verso il centro della Terra) ed è un caso particolare della forza gravitazionale, valida vicino alla superficie terrestre dove g è quasi costante.
spiegami la reazione vincolare normale
È la forza esercitata da una superficie perpendicolarmente al contatto con un corpo, che impedisce a quest’ultimo di penetrarla. In assenza di altre forze verticali, bilancia il peso (N=P).
spiega la tensione esercitata su un filo
È la forza trasmessa lungo un filo o una corda tesa, diretta sempre verso l’interno del filo (tirando gli estremi). In un filo ideale (massa trascurabile e inestensibile) la tensione è la stessa in ogni punto.
tre leggi di Amontons e Coulomb
Quando il corpo è fermo:
Fs < μsN
le superfici iniziano a scorrere se:
Fs = μsN
se le due superfici scorrono, l’attrito dinamico:
Fd = μdN
0 < μd < μs < 1
da cosa è originato l’attrito?
Deriva da irregolarità microscopiche delle superfici e da interazioni molecolari tra i punti di contatto. Anche superfici “lisce” presentano asperità che si incastrano e richiedono forza per essere superate.
Più sono i frattali in contatto, più l’attrito sarà forte.
Spiega la formula dell’attrito viscoso
Per velocità piccole, la forza viscosa è proporzionale alla velocità:
Fv = −bv - b’ v |v|
-bv è il coefficiente viscoso, che dipende dal fluido e dalla forma del corpo. Il segno meno indica che la forza si oppone al moto.
- b’ v |v| è dovuto alla formazione di vortici
spiega la forza elastica
È la forza con cui un corpo elastico tende a ritornare alla forma iniziale quando viene deformato. Segue la legge di Hooke:
F = −kΔx
dove k è la costante elastica e Δx l’allungamento o la compressione.
cos’è un oscillatore armonico?
È un sistema in cui la forza è proporzionale allo spostamento e diretta verso la posizione di equilibrio:
F=−kx
e segue la legge oraria:
x(t) = A sen (wt + phi)
Esempi: massa su molla, pendolo per piccole oscillazioni. Il moto risultante è armonico semplice, con oscillazioni sinusoidali
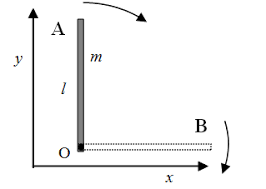
Come funziona il pendolo semplice?
È costituito da una massa puntiforme appesa a un filo inestensibile e senza massa, di lunghezza L. Oscilla sotto l’azione della componente tangenziale del peso.
dimostra la formula dell’accelerazione del pendolo semplice
v(t) = v(t) uT (t)
uT = (cosa, sina)
calcolo la derivata della velocità
dv/dt = dv/dt uT + duT/dt v
duT/dt = (da/dt -sena, da/dt cosa) = da/dt (-sena, cosa) = da/dt uN
per il moto circolare v = dx/dt = L da/dt
quindi da/dt = v/L
l’accelerazione è quindi
a = dv/dt = dv/dt uT + duT/dt v = dv/dt uT + v/L uN v = dv/dt uT + v2/L uN
qual è l’equazione per il moto di un pendolo semplice?
equazione di Newton:
mi a = T + mg g
lungo la direzione tangenziale:
mi L d2a/dt2 = -mg g sena
lungo la direzione normale:
mi L d2a/dt2 = T - mg g cosa
Concentrandomi sull’equazione tangenziale posso effettuare l’approssimazione per piccole oscillazioni, semplificando sina con a:
d2a/dt + mg/mi g/L a = 0
che è la classica equazione per l’oscillatore armonico, che ha pulsazione:
w = sqrt(mg/mi g/L) = sqrt(g/L)
e periodo:
T = 2pi/w
Cosa s’intende per approssimazione delle piccole oscillazioni?
Quando l’angolo di oscillazione θ è piccolo, si può approssimare sinθ≈θ (in radianti). Questo linearizza l’equazione del moto, che diventa quella di un oscillatore armonico semplice.
dammi la definizione di corpo rigido
Un corpo si dice rigido se la distanza tra qualsiasi sua coppia di punti è fissa. Ciò è dovuto ai legami interatomici che tengono fermi gli atomi.
quanti gradi di libertà ha un corpo rigido?
Fissato un punto A nel corpo rigido, abbiamo 3 coordinate (xyz).
Fissato un secondo punto B esso ha 2 gradi di libertà, perché ha distanza fissa da A.
Fissato un terzo punto C esso ha 1 grado di libertà, perché può solo che ruotare attorno la congiungente A-B.
Quindi in totale un corpo rigido ha 3 + 2 + 1 = 6 gradi di libertà
quali sono i tipi di moto che può compiere un corpo rigido? Dimostra una certa proprietà legata alle velocità
in generale il moto è una successione di coppie rotazione + traslazione infinitesime. In generale l’asse di rotazione cambia nel tempo, infatti viene detto asse di rotazione ISTANTANEO.
Quindi basta conoscere la velocita e la velocità angolare rispetto un asse del corpo per conoscere il suo moto in un istante.
La velocità dipende dalla psizionedella particella del corpo rispetto all’asse di rotazione, ma la velocità angolare no perché descrive l’angolo spazzato in un certo tempo
DIMOSTRAZIONE
Scelgo due punti all’interno del corpo, P e Q, mentre O è il punto per cui passa l’asse di rotazione, allora:
vP = vo + w x OP
vQ = vo + w x OQ
vP - vQ = w x (OP-OQ = w x QP
quindi vP = vQ + w x QP
per cui la velocità angolare è la stessa anche se ho scelto l’asse che passa per Q.
posizione del centro di massa per un corpo rigido?
dato che ρ = dm/dV e che m = ∫dm = ∫ρdV
rCM = ∫rdm/∫dm = ∫rρdV/ ∫ρdV = 1/m ∫rρdV
se il corpo è OMOGENEO, quindi con ρ costante:
rCM = ρ/m ∫rdV
quali sono le condizioni necessarie affinché avvenga l’equilibrio?
la somma vettoriale di tutte le forze esterne deve essere nulla, così come la somma di tutti i momenti delle forze esterni
quanti gradi di libertà ci sono nelle rotazioni attorno ad un asse fisso?
quando fisso un punto dell’asse perdo tre gradi di libertà, mentre se ne fisso un’altro (andando quindi a determinare l’asse di rotazione) ne perdo altri 2.
Dai sei gradi di libertà iniziali ne tolgo 5, per cui servirà un’unica equazione per determinare il moto di rotazione attorno ad un asse fisso.
rotazioni intorno ad un asse fisso: determina il momento assiale
uso la seconda equazione cardinale dLo/dt = Mo
moltiplicandola per il versore uz ottengo
dLz/dt = dLo uz/dt = Mo uz = Mz
rotazioni intorno ad un asse fisso: trova la formula che lega Lz a Iz, ovvero il momento angolare al momeno d’inerzia rispetto l’asse z. Cosa succede integrando ancora?rotazioni intorno ad un asse fisso:
So che ogni elemento ruota con velocità v = w x R (w perp. R)
Inoltre il momento angolare di dm è
dL = r x p = r x dm v = r dm v uT = r dm w R uT
uT = versore perpendicolare a r e v
dLz = dL uz = r dm w R uT uz = r dm w R cos(pi/2 - θ) =
r dm w R sinθ = dm w R2
integro:
∫dLz = Lz = ∫ w R2 dm = ∫ w (x2 + y2) ρdV = Iz w
integrando ancora:
dLz/dt = Iz dθ/dt = Iz α = Mz
rotazioni intorno ad un asse fisso: parla del moto del CM
il moto del CM è determinato perché dista RCM dall’asse di rotazione, per cui:
aCM,T = α RCM
aCM,N = w2 RCM
vCM = w RCM
rotazioni intorno ad un asse fisso: ricava l’energia cinetica
K = ∫ ½ dm v2 = ∫ ½ ρ v2 dV = ∫ ½ ρ w2 R2 dV = ½ Iz w2 = ½ Lz2/Iz
rotazioni intorno ad un asse fisso: teorema delle forze vive e potenza
dW = dK = Iz w dw = Iz dφ/dt dw = Iz dw/dt dφ = Mz dφ
P = dW/dt = Mz w
rotazioni intorno ad un asse fisso: generalizzazione di Lz
Se il moto è completamente determinato dal momento delle forze Mz, lo stesso non vale per il momento angolare Lz. Abbiamo che il momento angolare sia soltanto Lz solo nel momento in cui l’asse di rotazione è l’asse di simmetria.
L = Iz w
momento d’inerzia rispetto un asse di rotazione fisso
I = ∫ R2 dm
dove R = distanza punto infinitesimo di massa dm-asse.
= ∫V ρ R2 dV
= ∫V ρ (x2+y2) dV
momento d’inerzia rispetto all’asse di simmetria di un asta di lunghezza L
I = ∫-L/2L/2 x2 dm = ∫ ρ x2 dx = ρ (L3/24 + L3/24) = m L2 / 12
momento d’inerzia rispetto all’asse di simmetria di un anello sottile di raggio R
I = ∫02pi R2 dm = ∫ ρ R2 dl = ρ R2 ∫ dl = ρ R2 2 pi R
circonferenza cerchio
ρ * circonferenza = massa, per cui
I = m R2
oppure
m = ρ * 2 pi R
I = ∫02pi R2 dm = ∫ R2 R dθ ρ = 2 pi R3 ρ = m R2
momento d’inerzia rispetto all’asse di simmetria di un disco di raggio R
so che ρ = m / pi R2
I = ∫0R dr ∫02pi dθ r r2 ρ = 2 pi R4/4 ρ = ½ m R2
momento d’inerzia rispetto ad un asse di simmetria di un cilindro di raggio R e altezza L
ρ = m / pi R2 L
I = ∫0R dr ∫02pi dθ r ∫0L dz r2 s =
= R4/4 2 pi L ρ = ½ m R2
momento d’inerzia rispetto ad un asse di simmetria di una sfera di raggio R
ρ = m / 4/3 pi R3
sin2θ = 1 - cos2θ
sinθdθ = -d cosθ
I = ∫0R dr ∫0pi dθ r sinθ ∫02pi dφ (rsinθ)2 ρ =
= 2 pi R5/5 ∫-11 d cosθ (1 - cos2θ) ρ =
= 2 pi R5/5 (2-2/3) = 2 pi R5/5 4/3 m/(4/3 pi R3) = 2/5 R2 m
enuncia e dimostra il teorema di Huygens - Steiner
il momento d’inerzia di un corpo rigido rispetto ad un asse che di trova a distanza D dal CM è dato dalla somma del momento di inerzia rispetto ad un asse parallela ma passante per il CM I0 e del prodotto mD2
I = I0 + mD2
DIMOSTRAZIONE
nuove coordinate di P:
z’ = z
x’ = x
y’ = y + D
I = ∫V (x2+y2) dm =
passo alle coordinate del nuovo asse di rotazione
∫ [x’2 + (y’ - D)2] dm =
svolgo il quadrato di binomio
∫ [x’2 + y’2 - 2Dy’ + D2] dm =
= ∫ (x’2 + y’2) dm + D2 ∫ dm - 2D ∫ y’ dm
momento d’inerzia rispetto l’asse z’
mD2
nullo, perché =my’CM con y’CM la coordinata del CM è posta = 0
applicazione di huygens-steiner: calcola il momento d’inerzia di un’asta con punto fisso in uno degli estremi
I = I0 + mD2 = m L2 / 12 + m L2/4 = m L2 / 3
applicazione di huygens-steiner: calcola il momento d’inerzia di un disco con punto fisso in un estremo
I = I0 + mD2 = ½ m R2 + mR2 = 3/2 m R2
applicazione di huygens-steiner: calcola il momento d’inerzia di una sfera con punto fisso in un estremo
I = I0 + mD2 = 2/5 R2 m + m R2 = 7/5 R2 m
applica il teorema di Huygens-Steiner all’enercia cinetica nel caso di una rotazione attorno ad un asse fisso che non passa per il centro di massa
K = ½ I w2 =(H-S)= ½ (ICM + mD2) w2 = ½ ICM w2 + ½ m v2
Va a spiegare il teorema di Konig per l’energia cinetica, infatti
energia cinetica NEL CM
energia cinetica DEL CM
quando abbiamo un moto di precessione?
quando c’è un momento esterno non parallelo a L
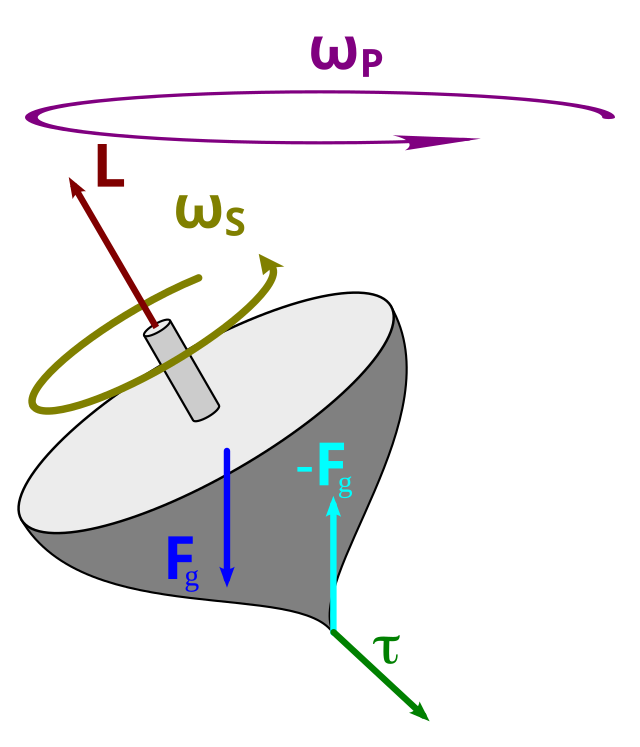
dimostra la velocità angolare di rotazione
considero due masse attaccate da un asta che ruotano sull’asse di rotazione che passa per il centro dell’asta, inclinato di un angolo θ rispetto l’asse.
so che la componente perpendicolare all’asse di rotazione del momento angolare Lp * w = 0
Poiché il moto delle due masse è circolare ci deve essere una forza che le spinge costantemente verso l’interno, ma:
momento delle forze con forza peso: (r2 = -r1)
r1 x mg + r2 x mg = (r1 - r1) x mg = 0
allora calcolo per una generica F, sapendo che F2 = -F1
r1 x F1 + r2 x F2 = r1 x F1 + (-r1) x (-F1) =
= 2r1 x F1 = Mtot
Che sappiamo essere perpendicolare al piano individuato da r e F (verso individuato dalla regola della mano destra)
Adesso studio il verso z:
dLz/dt = Mz = 0 perché M è perpendicolare a w
quindi Lz si conserva
L = r1 x mv1 + r2 x mv2 = 2r1 x mv1
quindi L è perpendicolare al piano individuato dai vettori r e v.
F perp v
r x F perp r x v = M perp L = dL/dt perp L
per cui dz/dt = 0 e L * dL/dt = 0
quindi tutto L si conserva → anche Lp
Uso la formula di Poisson per cui esiste Ω perp a Lp e dLp/dt tale che Ω x Lp = dLp/dt
Ma L è perpendicolare alla sbarra e ruota con essa, quindi anche Lp ruota con w e pertanto precede
quando avviene un moto di puro rotolamento?
Quando un corpo ruota senza strisciare attorno al punto di contatto
Come si calcola l’energia cinetica di un corpo in moto di puro rotolamento?
K = ½ Ic w2 = (H-S) = ½ m v2CM + ½ ICM w2
= ½ m (wR)2 + ½ ICM w2
cos’è un urto?
cos’è una forza impulsiva?
cosa succede durante un urto in assenza di forze esterne?
spiega quale energia cinetica può non conservarsi
classifica gli urti
cosa succede durante un urto in presenza di forze impulsive? come ottengo conservazione?
definizione di urto centrale
trova le due velocità finali in un urto elastico centrale
spiega le velocità rispetto al CM
cosa succede se m2 » m1?
se mi sposto nel CM, cosa posso dire sugli urti elastici non centrali?
metodo sperimentale
esperimento: bisogna raccogliere dati e osservazioni per verificare una teoria e porsi in condizioni le più semplici possibili, eliminando le variabili estranee e controllando le condizioni iniziali (con l’intuito fisico).
ipotesi: momento di induzione.
legge fisica: momendo di deduzione. Bisogna dedurre dall’ipotesi la legge che governa ciò che si sta osservando, e trarre varie conseguenze.
verifica: si compie attraverso vari esperimenti, che possono verificare l’intera legge o restringerne la validità, fino a smentirla del tutto.
leggi fisiche
Relazioni tra equazioni matematiche che servono a descrivere il comportamneto dei fenomeni naturali
equazione dimensionale
Un'espressione matematica che mette in relazione le dimensioni fisiche di una grandezza con altre grandezze fisiche, utile per analizzare e verificare la coerenza di leggi fisiche.
descrivere la posizione di un punto materiale
Retta orientata, sistema di assi cartesiano, levogiro e destrogiro
dimotra che lo spazio è omogeneo
= la scelta di origine è arbitraria…
dimostra che lo spazio è isotropo
= la scelta di direzione (verso degli assi) è arbitraria…
dimostra che il tempo è omogeneo
= la scelta di origine è arbitraria…
il tempo è
omogeneo
lo spazio è
isotropo, omogeneo e pari
regole epistemologiche di Newton
non ammettere altre cause dei fenomeni oltre a quelle necessarie a spiegarli
riferire alla stessa causa fenomeni equivalenti
validità dell’induzione fino a prova contraria (ovvero nuovi fenomeni scoperti che la contraddicono)
dimostra la parità dello spazio
= uguaglianza per simmmetria/riflessione
descrivi le coordinate polari
Sistema di coordinate che utilizza la distanza da un punto fisso e un angolo per determinare la posizione di un punto in un piano.
descrivi le coordinate sferiche
Coordinate utilizzate in un sistema tridimensionale per descrivere la posizione di un punto attraverso un raggio e due angoli.
cos’è una trasformazione di simmetria?
Una trasformazione che mantiene le proprietà geometriche di un oggetto, come la sua forma e dimensione, includendo riflessioni, rotazioni e traslazioni.
dimostra che la traiettoria di un proiettile è una parabola
Si parte dall’equazione del moto lungo l’asse delle x, x(t) = x0 + v0t.
Se x0 = 0, x(t) = v0xt
ricavo t = x/v0x
pongo a sistema le due equazioni del moto sui due assi cartesiani e sostituisco la t nell’equazione delle y: trovo che la traiettoria descritta è quella di una parabola.
dimostra l’angolo che comporta una gittata massima
ISTANTE 0
Si parte dall’equazione del moto lungo l’asse delle x, x(t) = x0 + v0t.
Se x0 = 0, x(t) = v0xt
ISTANTE FINALE
ricavo la t dall’equazione sull’asse delle y con la formula risolutiva delle equazioni di secondo grado, con segno positivo. xfinale = v0xt, per cui sostituisco la t e poi raccolgo v0y. Se pongo l’altezza h = 0, quindi che il proiettile parte da terra, trovo che xf = sin2a * v02/g
Per cui xf è massima se 2a = pi/2 → a = pi/4
trova la formula di poisson dalle considerazioni sul moto circolare
Si parte da v = ω x r. Vedo v come dr/dt.
r = R ur, per cui posso anche scrivere che dur/dt = ω x ur.
Generalizzando ad un vettore qualsiasi dA(t)/dt = d/dt (A(t) * uA) = (derivata di un prodotto)
poi sostituisco duA/dt con w x uA, che moltiplicato per A(t) mi da
wA x A(t).
deduci l’equazione del moto armonico dall’eq. di secondo grado dell’accelerazione e l’equazione del moto circolare.
a = -ω²x, dove a è l'accelerazione, ω è la pulsazione e x è lo spostamento. Questa equazione descrive il moto di un oscillatore armonico semplice, in cui l'accelerazione è proporzionale e opposta allo spostamento dalla posizione di equilibrio.
La vedo come un’equazione di secondo grado (d2x/dt2 = -ω²x), che risolvo con la formula risolutiva x(t) = c1sen(ωt + φ) + c2cos(ωt + φ), dove c1 e c2 sono costanti determine dalle condizioni iniziali.
c1 = v0/w
c2 = x0
per cui x(t) = v0/w sen(wt) + x0 cos(wt)
x(t) = A sen (wt + phi) = A senwt cos(phi) + A coswt sen(phi)
Quindi, mettendole a confronto, trovo che:
x0 = A sen(phi)
v0 = wA cos(phi)
tg(phi) = w x0 / v0
A = sqrt(x02 + v02/w)
x(t) = Rcoswt = Rsen(wt + pi/2)
y(t) = Rsenwt
relazione velocità-posizione
inizia da v dv
= v dv/dt dt = a v dt = a dx
poi si integra tra 0 e t, per cui 1/2(v2 - v02) = a (x-x0)
v = sqrt(v02 + 2a(x-x0))
moto con attrito viscoso
a = -kv. Vedo a come dv/dt, poi riordino:
dv/v = -k dt
integro tra 0 e t:
ln v/v0 = -kt
v/v0 = e-kt
v(t) = v0 e-kt
mentre x(t) = x0 + integrale tra 0 e t di v0 e-kt dt = x0 + v0/k (1 - e-kt)
per grandi t → x0 + v0/k
prodotto scalare
prodotto vettoriale
dammi la definizione di baricentro
il baricentro o centro di massa del sistema è il punto geometrico di coordinate
rCM = sum(mi ri) / sum(mi)
oppure, con la massa totale M
rG = 1/M * sum(mi ri)
la velocità del baricentro è
vCM = sum(mi vi) / M = p/M
differenziando rispetto al tempo:
dp/dt = M aG = sum(mi ai) = Fi
arriva ad enunciare la prima eq. cardinale della dinamica
la velocità del baricentro è
vCM = sum(mi vi) / M = p/M
differenziando rispetto al tempo:
dp/dt = M aG = sum(mi ai) = Fi (*)
abbiamo ricavato l’equazione m ai = Fi , ma conviene vedere la forza totale come una somma di forza esterna al sistema FiE e una fora interna dovuta alle particelle circostanti FiI.
Fi = FiI + FiE
Per il 3° principio di newton per ogni azione del punto i-esimo sul punto j-esimo Fji corrisponde una reazione uguale e contraria del punto j-esimo esercitata sul punto i-esimo Fij = -Fji
Essendo la somma vettoriale INDIPENDENTE dal punto di applicazione, abbiamo che FiI = sumi=/=j (Fij) e che quindi
sumi=1N(FiI) = sumi,j = 1N(Fij)
DIMOSTRAZIONE (1 ver)
sumi<j(Fij) + sumj<i(Fij) =
= sumi<j(Fij) - sumj<i(Fji)
dato che la somma è indipendente dal nome delle variabili su cui si somma, posso scambiare la i e la j nel secondo termine:
sumi<j(Fij) - sumi<j(Fij)
DIMOSTRAZIONE (2 ver)
fisso una coppia i, j e considero solo le forze che coinvolgono i e j
Fij + Fji = (3° princ) = Fij - Fij = 0
quindi (*) sarebbe
dp/dt = sum(mi ai) = (2° princ) = sum(FiI + FiE) = sum FiE = FE
cosa dice il teorema del moto del baricentro? Qual è una sua conseguenza?
il baricentro si muove come un punto materiale in cui sia concentrata tutta la massa del sistema e su cui agisce la risultante delle forze esterne.
La sua conseguenza afferma che per conoscere il moto del baricentro è sufficiente conoscere le forze esterne che agiscono su di esso.
come si effettua il passaggio da un insieme di elementi discreti a un insieme continui di infinite particelle?
basta scomporre il volume in moltissimi volumetti infinitesimi e passare da sommatorie a integrali:
limΔV→0 sum(ΔVi ρ(ri) ri) = 1/M ∫ ρ(ri) ri dV
spiega come arrivare alla seconda equazione cardinale della dinamica
Ho un polo O e un vettore rO che descrive le coordinate di O rispetto l’origine del sistema.
Il momento angolare rispetto ad O è dato da
Lo = sum LOi = sum (OPi x pi)
derivo:
dLo/dt = sum d/dt(OPi x pi) =
= sum (dOPi/dt* pi + OPi *dpi/dt) (#)
d/dt OPi = vi - vo
(#) diventa sum (vi - vo) x pi + OPi x Fi
Ma vi x pi = 0 perché paralleli, quindi
-vo x pi + OPi x (sum(FiI + FiE))
dimostro che posso eliminare le forze interne:
sumi,j OPi Fij = sumi<j OPi x Fij + sumj<i OPi x Fij
adesso cambio i con j e j con i
= sumi<j OPi x Fij + sumi<j OPi x Fij = (1° parte 3° princ)
= sumi<j (OPi x Fij - OPj x Fij) = sumi<j (OPi - OPj) x Fij =
= sumi<j PjPo x Fij = 0 perché Fij // PjPi
Quindi, riprendendeo il discorso di prima
dLo/dt = - vo x pi + OPi x (sum(FiI + FiE)) =
= - vo x pi + sum(OPi x FiE) = -vo x p + ME
Questa equazione si semplifica con solo dLo/dt = ME se:
O è fisso (vo = 0)
il baricentro è fisso (p = mvCM = 0)
vo // vCM
O corrisponde con il centro di massa
spiega la differenza tra ‘nel CM’ e ‘del CM’ e come preferisce distinguerli il prof
una scrittura del tipo v* indica nel CM, ovvero la velocità osservata dal sistema del CM.
una scrittura del tipo vCM indica la velocità complessiva del CM visto dall’esterno, e viene chiamato del CM
spiega e dimostra il teorema di Konig per il momento angolare
connette il momento angolare rispetto al polo O e quello rispetto al CM. Il teorema ci dice infatti che:
Lo = rCM x p + (LCM)*
il momento angolare rispetto un arbitrario polo O = momento angolare del CM + momento angolare del CM.
DIMOSTRAZIONE
so che ri = ri* + rCM e che vi = vi* + vCM
Lo = sum (ri x mi vi) =
= sum ((ri* + rCM) x mi (vi* + vCM))
= sum (ri* x mi vi*) + rCM x sum(mi vi*) + sum (miri*) x vCM + rCM x MvCM
si eliminano perche p* = 0 e miri* = 0
sum (ri* x mi vi*) = LCM*
rCM x MvCM = rCM x p
Ho dimostrato che Lo = LCM* + rCM x p
spiega e dimostra il teorema di Konig per l’energia cinetica
l’energia cinetica totale K è la somma dell’energia cinetica DEL CM e dell’energia cinetica NEL CM
K = ½ M vCM2 + K*
DIMOSTRAZIONE
K = sum ( ½ mi vi vi) = sum ( ½ mi (vi* + vCM) (vi* + vCM))
= ½ sum (mi vi*2 ) + ½ vCM sum(mi vi*) + ½ vCM sum(mi vi*) + ½ sum(mi vCM * vCM)
si eliminano perché p* = 0
½ sum (mi vi*2 ) = K*
½ sum(mi vCM * vCM) = ½ M v2CM
parla delle coniche e come trovare l’equazione del raggio in funzione dell’eccentricità e di un certo parametro p
differenzia i tre casi: e<1, e=1 e>1 e spiega il perché
differenza tra epicIclo e deferente
Che cos’è il deferente nel modello tolemaico?
È la grande circonferenza lungo la quale si muove il centro dell’epiciclo. Rappresenta il percorso principale del pianeta attorno alla Terra (posta vicina al centro, o in un punto leggermente decentrato detto eccentrico).
Che cos’è l’epiciclo?
È la piccola circonferenza sulla quale si muove il pianeta, il cui centro a sua volta percorre il deferente. Serve a spiegare i moti retrogradi osservati nei pianeti.
arriva alla formulazione della prima legge di Keplero
spiega la seconda legge di keplero
parla della terza legge di keplero