AP Calculus BC Review
1/74
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
75 Terms
Tangent Line
Straight line on the curve at a given point that can be used to estimate values near by
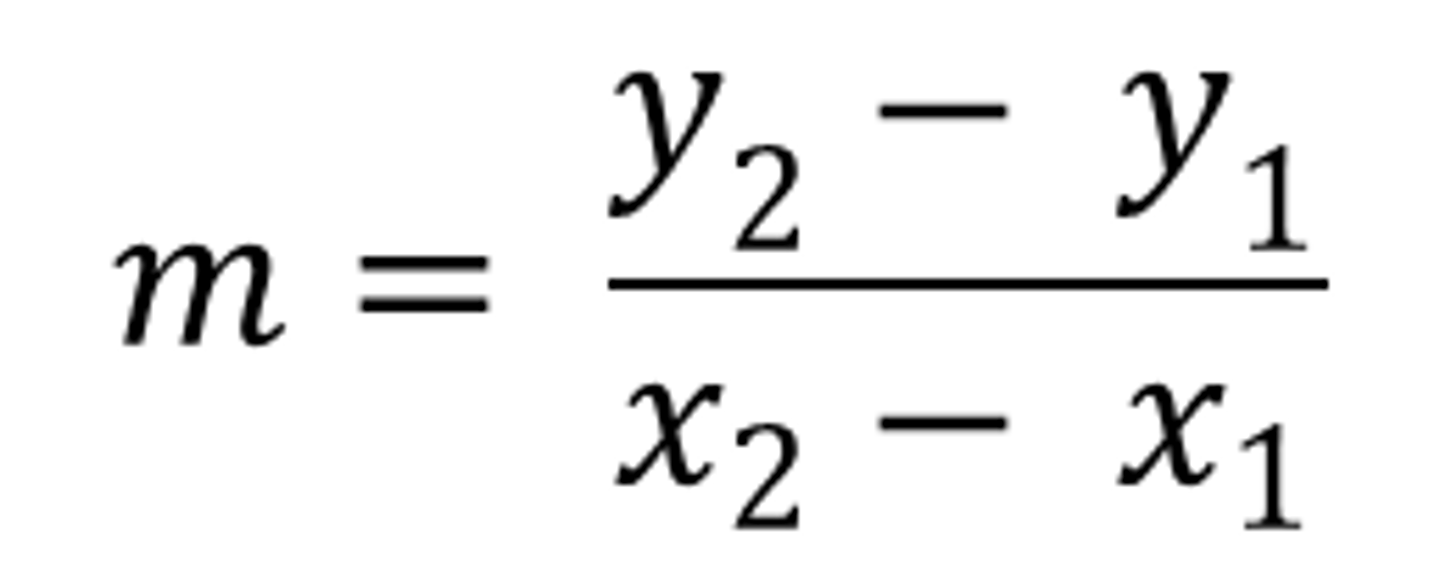
Slope
Rise over run
Instantaneous Rate of Change
the rate of change at a particular moment, for F(x) this would be F'(x)
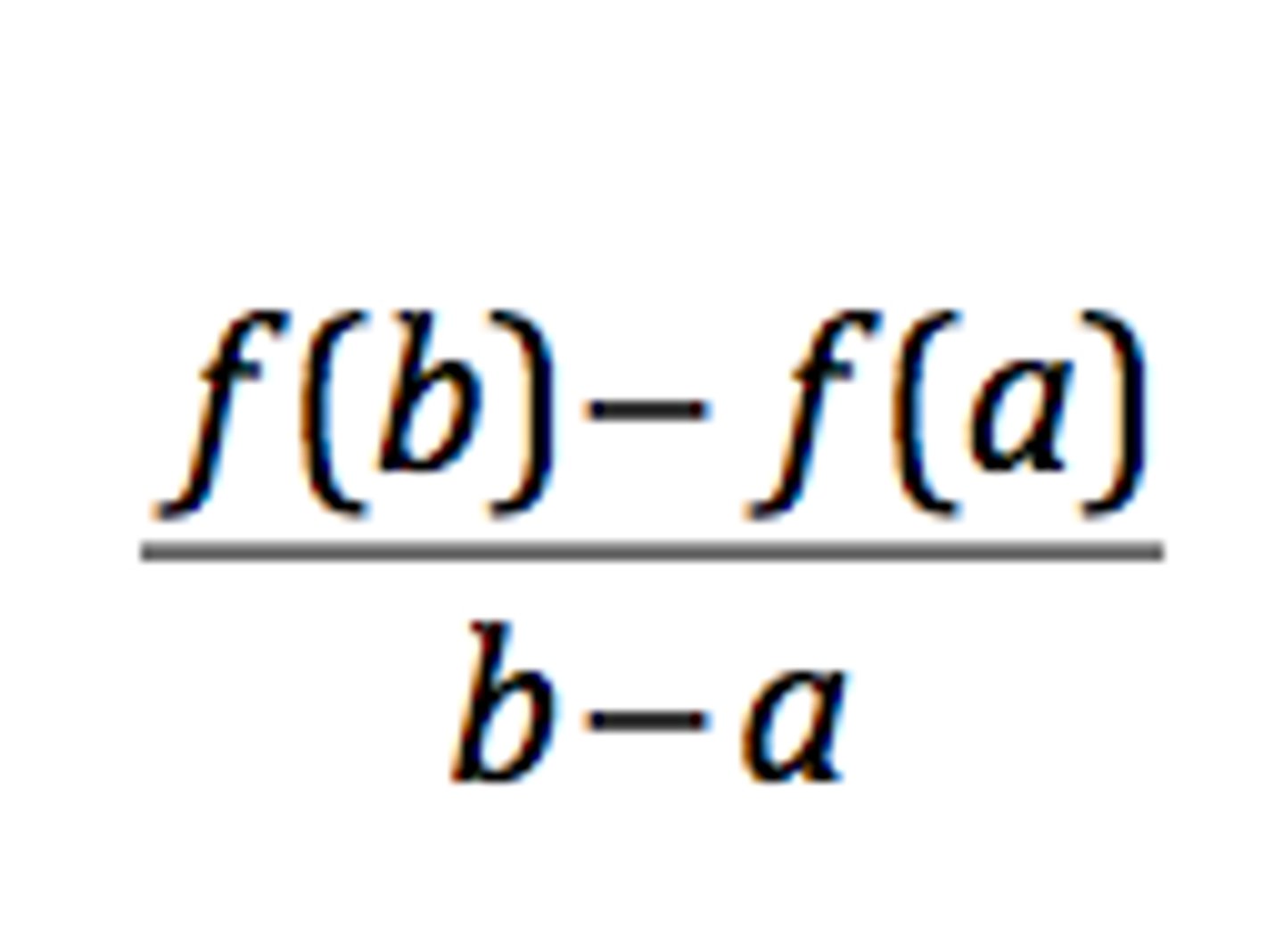
Average Rate of Change
the change in the value of a quantity divided by the elapsed time
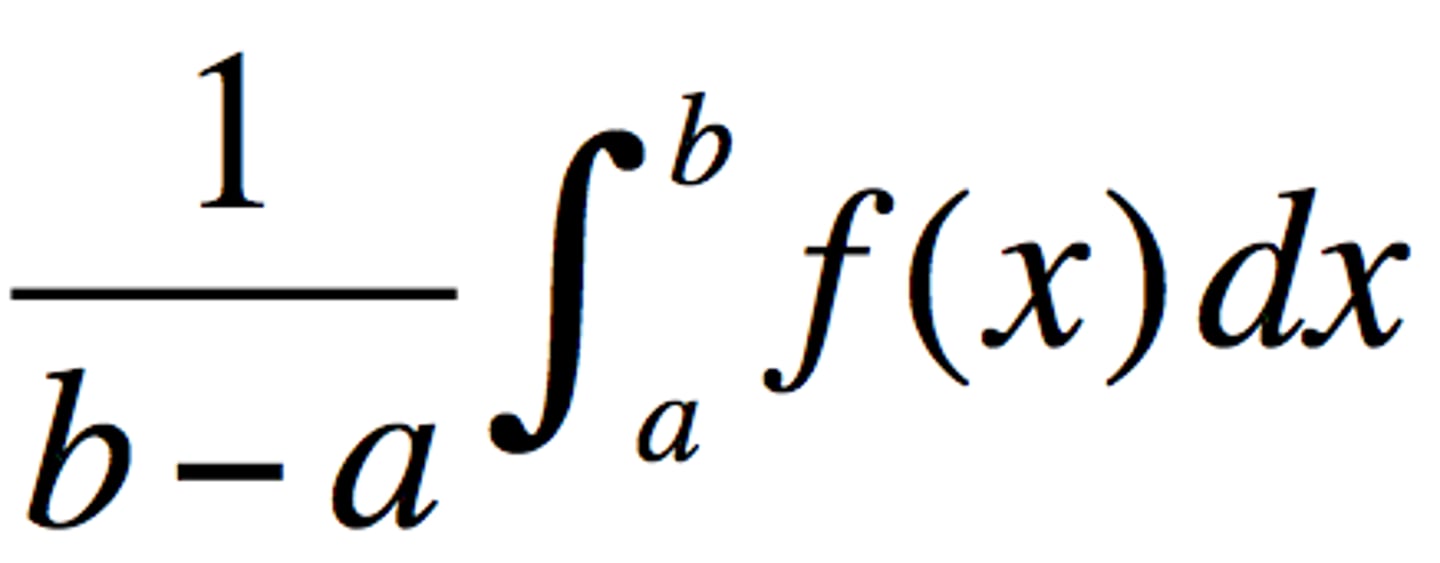
Average Value
finds the average value of a function. often related to the mean value theorem
Linear Approximation
Using the tangent line to approximate nearby values

Displacement
The distance and direction of an object's change in position from the starting point.
function is given in relation to time
Velocity
The speed at which an object is traveling
velocity function is the derivative of a position function in relation to time.
Acceleration
The rate at which velocity changes
Acceleration function is the derivative of a velocity function in relation to time
Total Distance
Total distance traveled
to do this calculate integral of velocity graph positive and negative sections separately and add absolute value of those together.
Speeding Up
Acceleration has the same sign as Velocity
Slowing Down
Acceleration has the opposite sign as Velocity
Area Under the Curve
Integral or antiderivative
Area Between Curves
with f(x) on top and g(x) on bottom
a and b represent bounds or where the two graphs intersect
Disc Method of Rotation
V = pi * int from a to b of R(x)^2 dx
R(x) is radius and dx is height
rotated around variable inside
Washer Method of Rotation
V = pi * int from a to b of ( R(x)^2 - r(x) ^2 ) dx
R(x) is furthest away from axis
r(x) is closest to axis
rotated around variable inside
Shell Method of Rotation
V = 2pi int from a to b of ( x F(x) ) dx
rotated around opposite variable inside
Definition of A Derivative
we say that f is differentiable at x = a and the limit is the derivative of f(x) at x = a, denoted by f prime of a.
Continuity
A function is uninterrupted, this implies integratibility
Product Rule
Quotient Rule
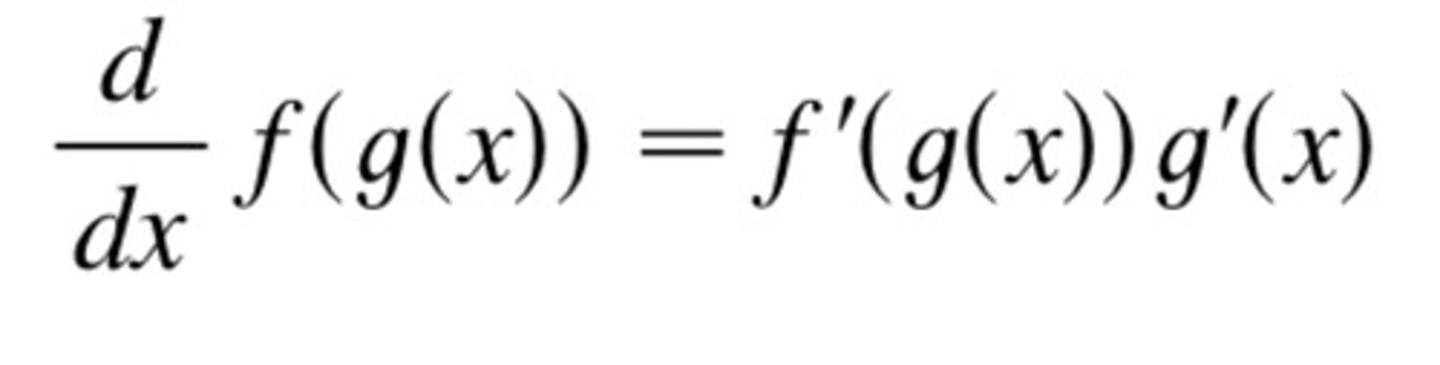
Chain Rule
also applies to Trig functions, natural logs, and e
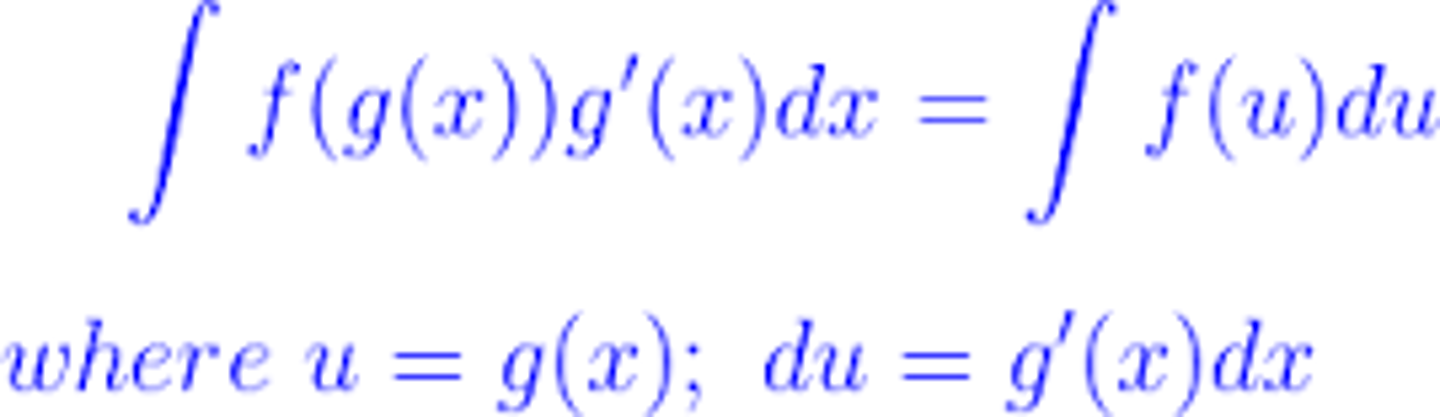
U-Substitution
Integration by Parts
int u dv = u v - int v du
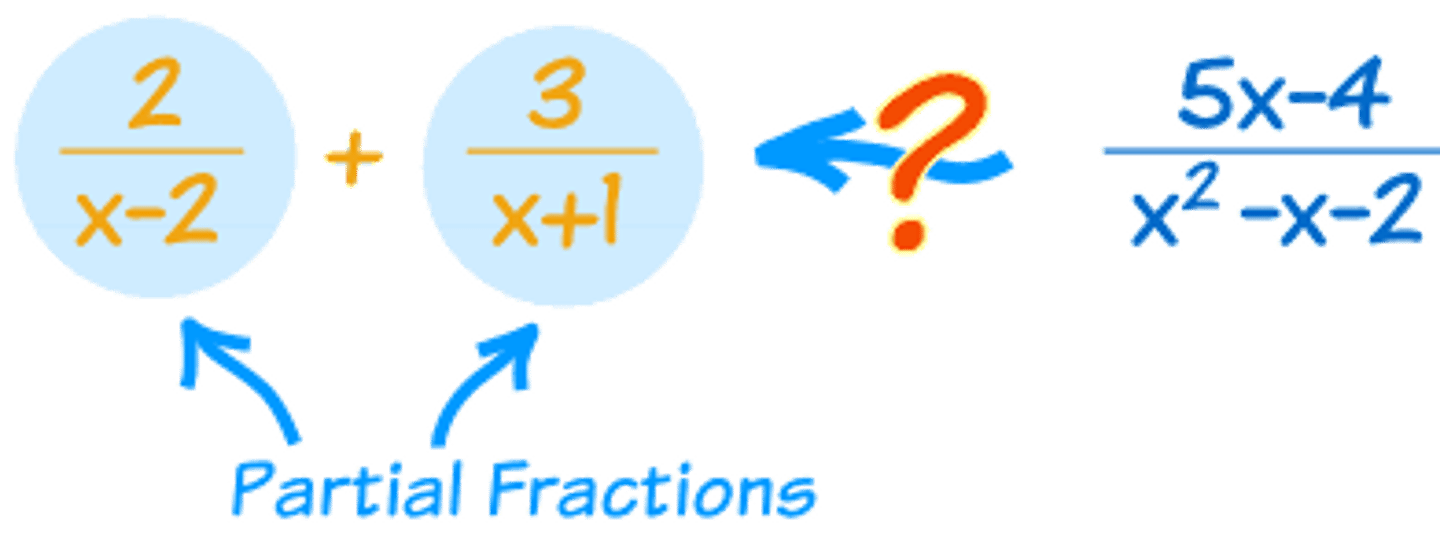
Partial Fractions
Splitting up a fraction into its parts can make integration easier!
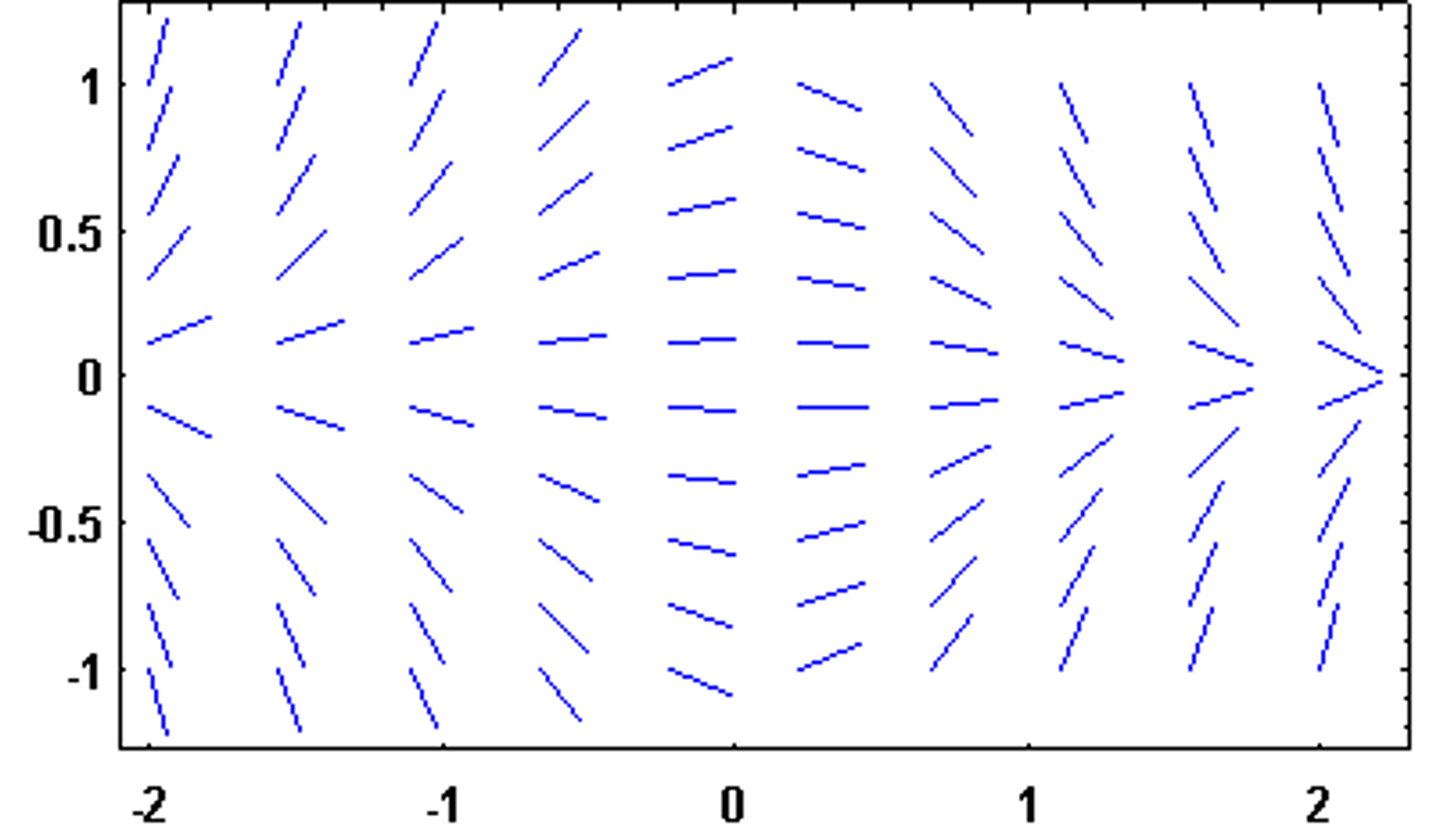
Slope Fields
Drawing the slopes at different points for a function (often that is difficult to integrate) can help predict the shape of the function
Particular Solution
Integration that has value for c solved for by plugging in a known coordinate pair
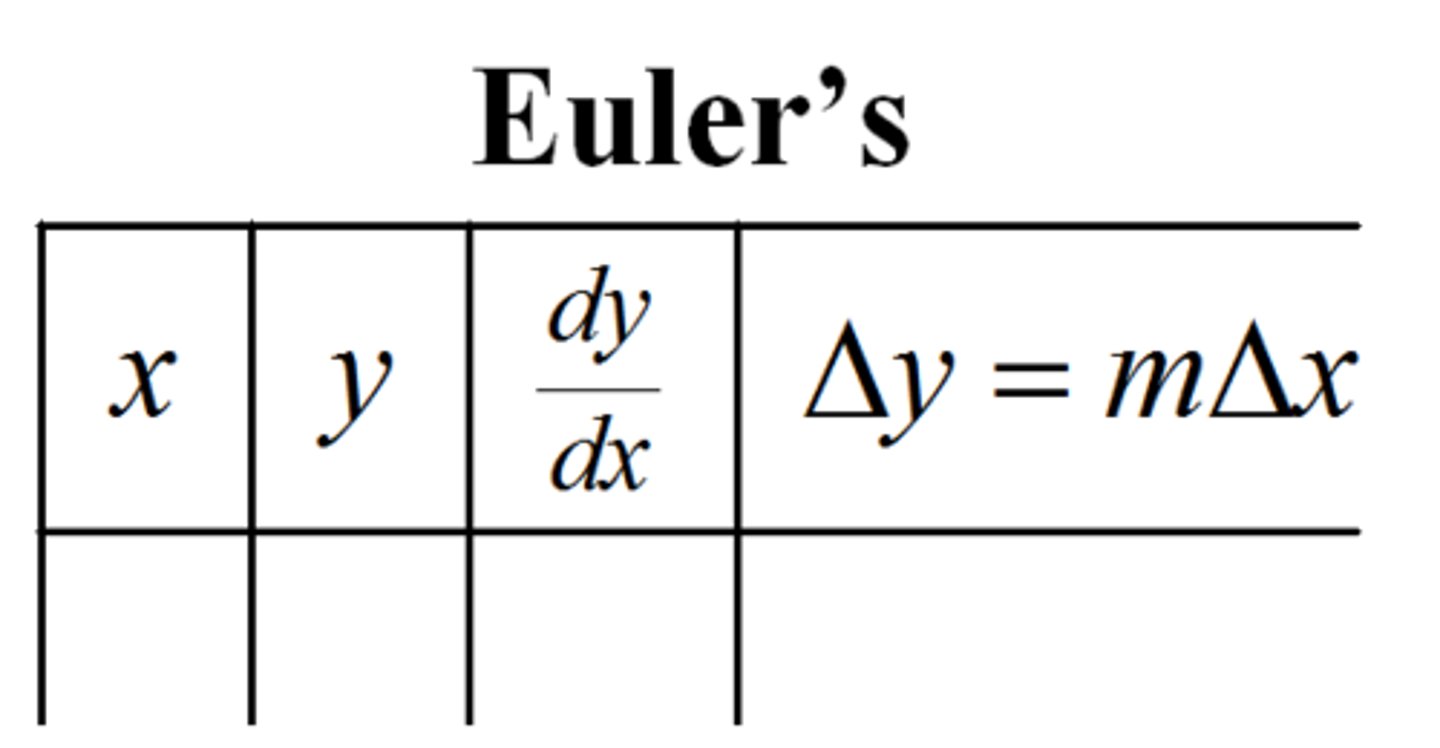
Euler's Method
a method of approximation helpful when dy/dx has x and y terms in it
g(x) is increasing
g'(x) is positive
g(x) is decreasing
g'(x) is negative
g(x) is concave up
g''(x) is positive
g(x) is concave down
g''(x) is negative
g(x) changes directions
g'(x) passes through 0
g(x) has a point of inflection
g''(x) passes through 0 or DNE
Local/Relative Maximum
A point on the graph of a function where no other nearby points have a greater y-coordinate.
Local/Relative Minimum
A point on the graph of a function where no other nearby points have a lesser y-coordinate.
Absolute Maximum
The y-value of a point on a graph that is higher than any of the other points on the entire graph.
Needs to be proved with critical points and the limits as x approaches - infinity and + infinity
Absolute Minimum
The lowest point of the function
Needs to be proved with critical points and the limits as x approaches - infinity and + infinity
Stationary Points
Maximum Points, Minimum Points, and Points of Inflection
Critical Point
Occurs when f'(x) = 0
Can be a min, max, or neither
Related Rates
A class of problems in which rates of change are related by means of differentiation. Standard examples include water dripping from a cone-shaped tank and a man's shadow lengthening as he walks away from a street lamp.
Riemann Sums
A Riemann Sum is a method for approximating integrals
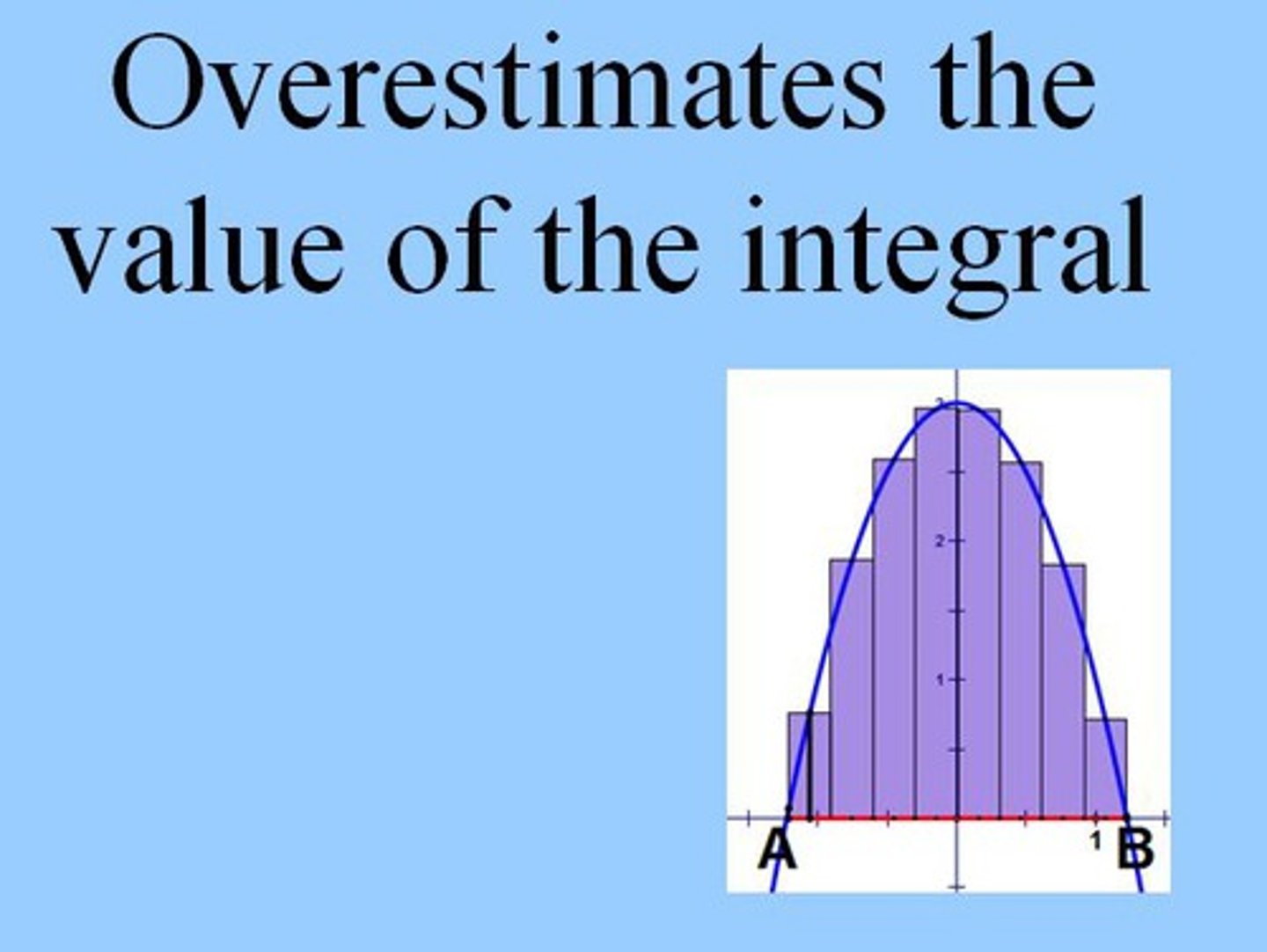
Trapezoidal Sums
Riemann Sums done with averaging two points instead of picking a side
can be more accurate
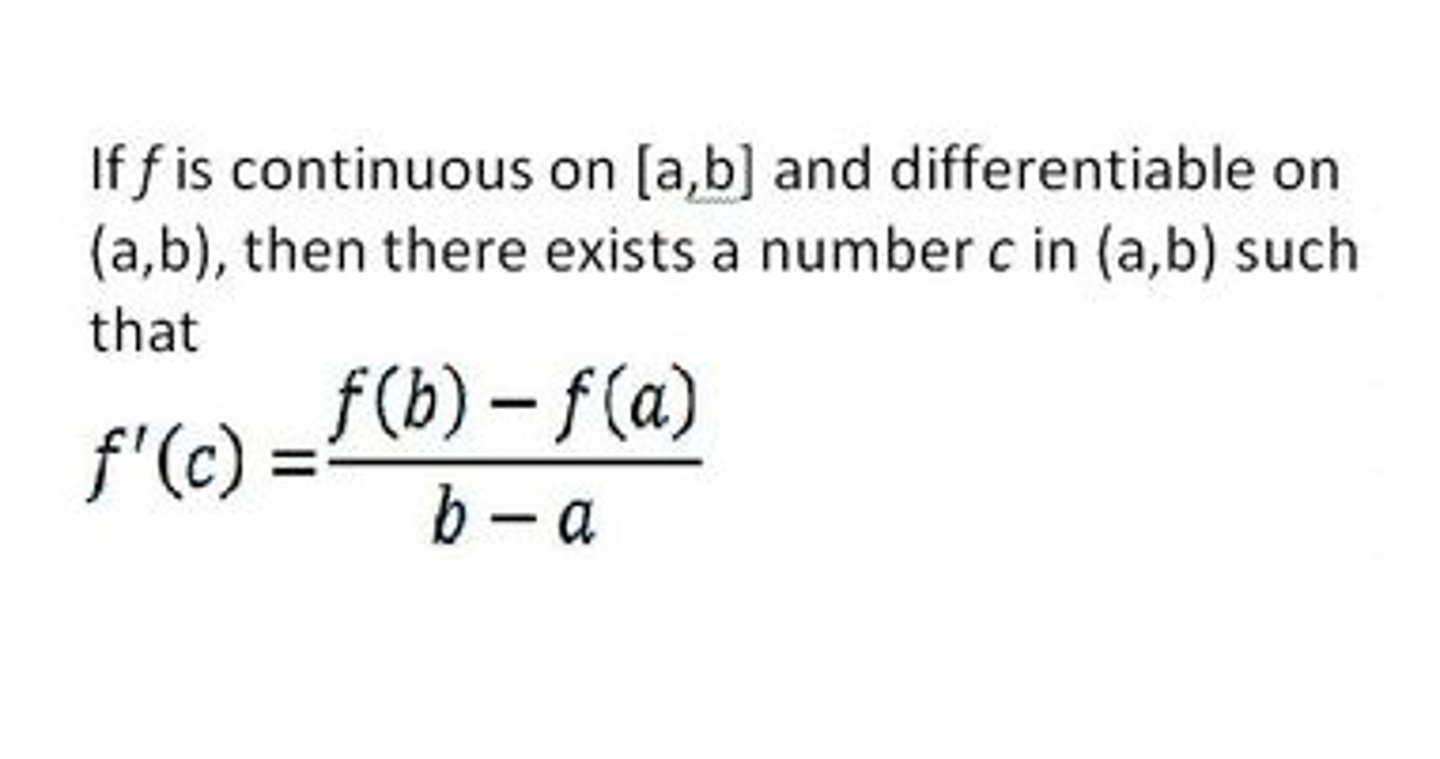
Mean Value Theorem
the average value on a certain integral must have a value of x that it is equal to
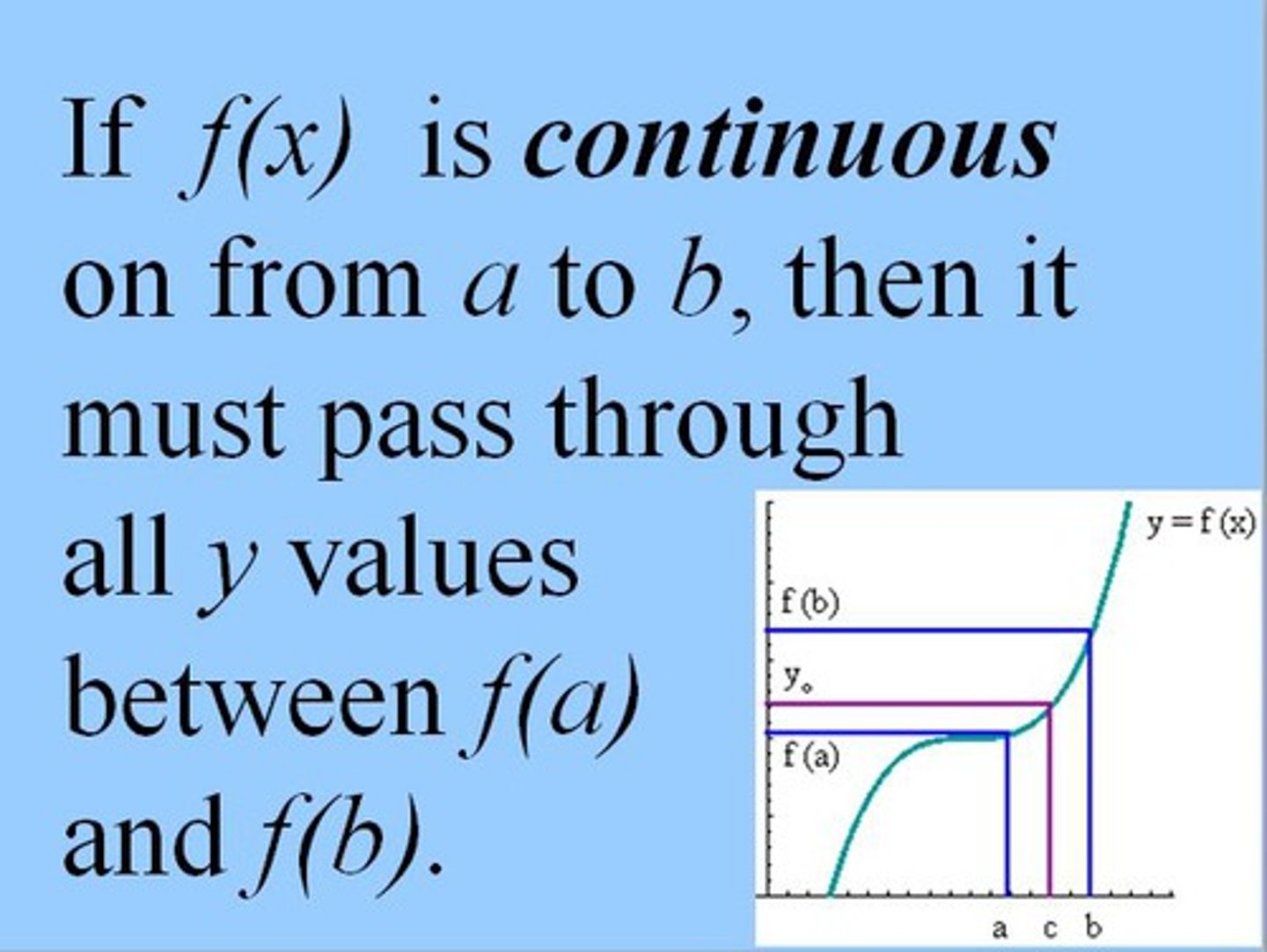
Intermediate Value Theorem
Extreme Value Theorem
1st Fundamental Theorem of Calc
int from a to b of f'(x) dx = f(b) - f(a)
2nd Fundamental Theorem of Calc
d/dx (int from c to x of f(t) dt) = f(x)
L'Hopital's Rule
if lim x --> of g(x)/f(x) is 0/0 then you can derive
Find int 0 to infinity of f(x) dx
substitute b and do lim as b--> infinity
Polar Coordinates
(r,theta)
Polar Derivatives
dy/dx = (dy/dtheta)/(dx/dtheta)
Polar Length of Curve
int of alpha to beta of sqrt ( (dx/dtheta)^2 + (dy/dtheta)^2)
Polar Integrals
0.5 int from alpha to beta r^2 dtheta = area
Parametric Coordinates
(x(t),y(t))
Parametric Derivatives
dy/dx = (dy/dt)/(dx/dt)
d2y/dx2 = (d/dt(dy/dt))/(dx/dt)
Parametric Length of Curve
int of a to b of sqrt ( (dx/dt)^2 + (dy/dt)^2)
Parametric Integrals
integrals normal but with position vectors and relative to t
Particle motion
s = ( x(t) , y(t) )
v = ( x'(t), y'(t) )
a = ( x''(t), y''(t) )
Magnitude
|| v(t) || = sqrt ( ((dx/dt)^2) + ((dy/dt)^2) )
Series for sin x

Series for cos x

series for e^x
e^x = 1 + x + (x^2)/2! + (x^3)/3! + ...
Maclaurin Series
a Taylor series about x=0
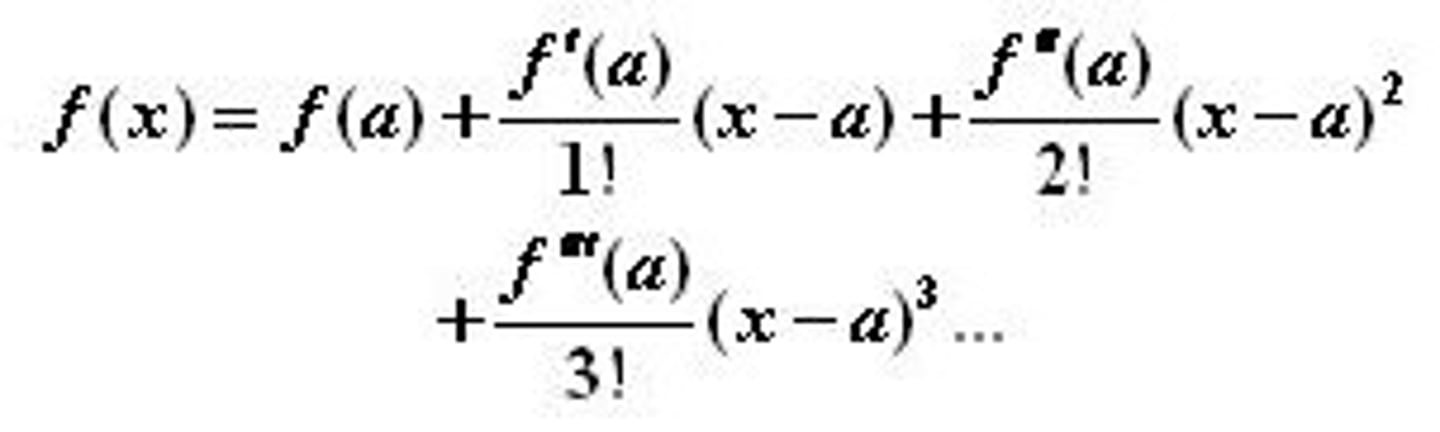
Taylor Series
if the function f is smooth at x=a, then it can be approximated by the nth degree polynomial f(x) ~ f(a) + f'(a)(x-a) + f"(a)(x-a)^2/2! + ... + f^n(a)(x-a)^n/n!
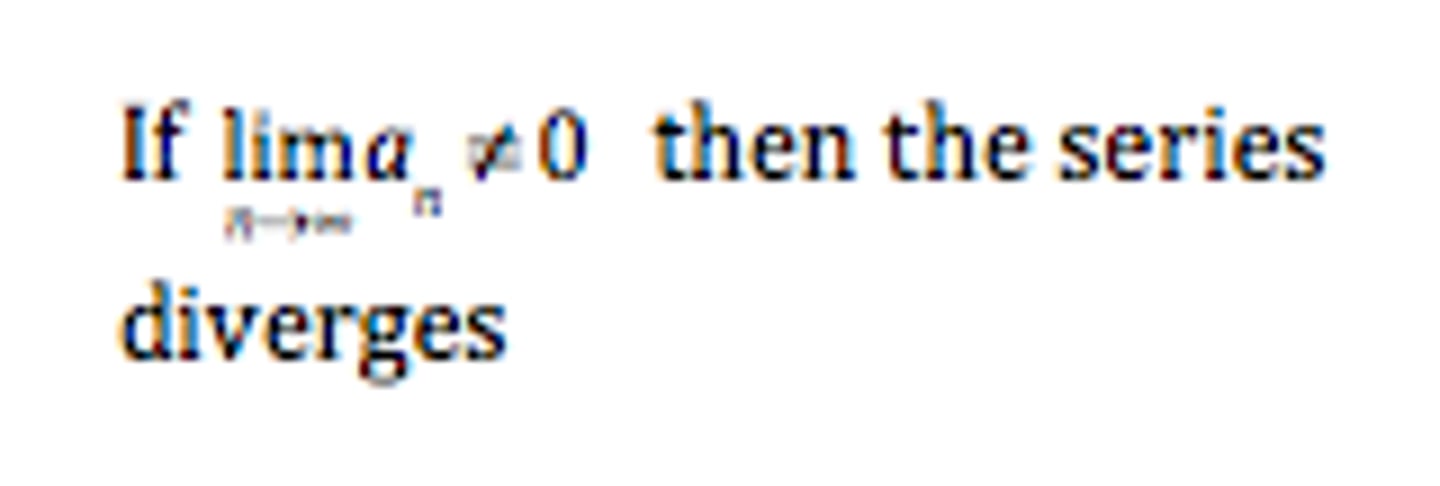
nth term test for divergence
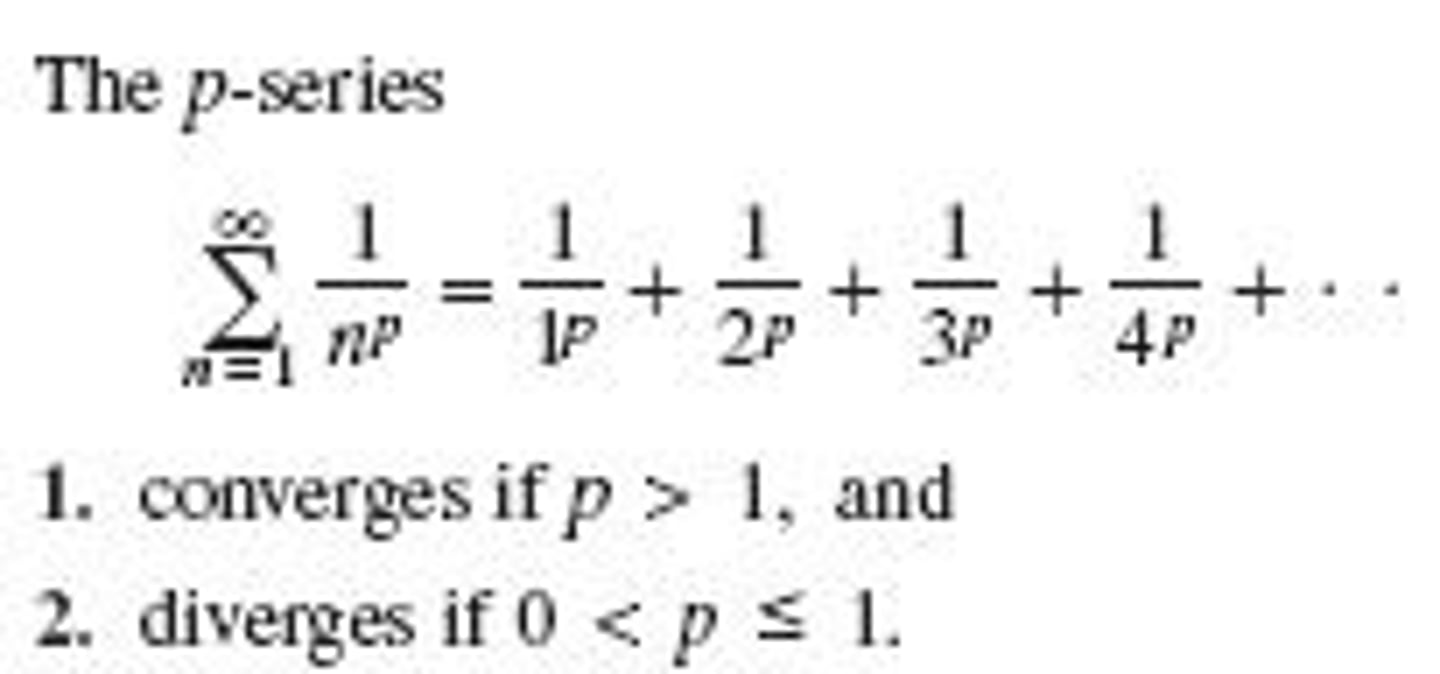
p-series test
Geometric Series Test
An = a r^(n-1) , n>= 1
|r| < 1 converges to a/(1-r)
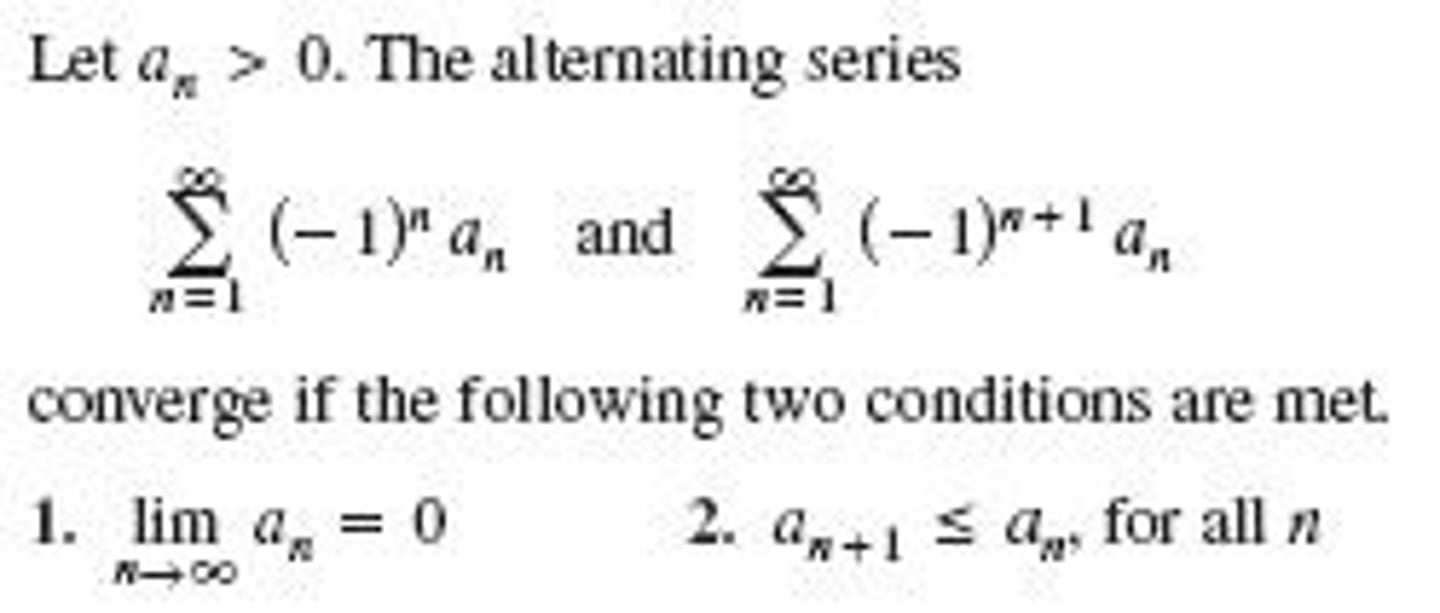
Alternating Series Test
An = (-1)^n bn , bn>=0
is bn+1 <= bn and lim n-> infinity of bn=0 series converges
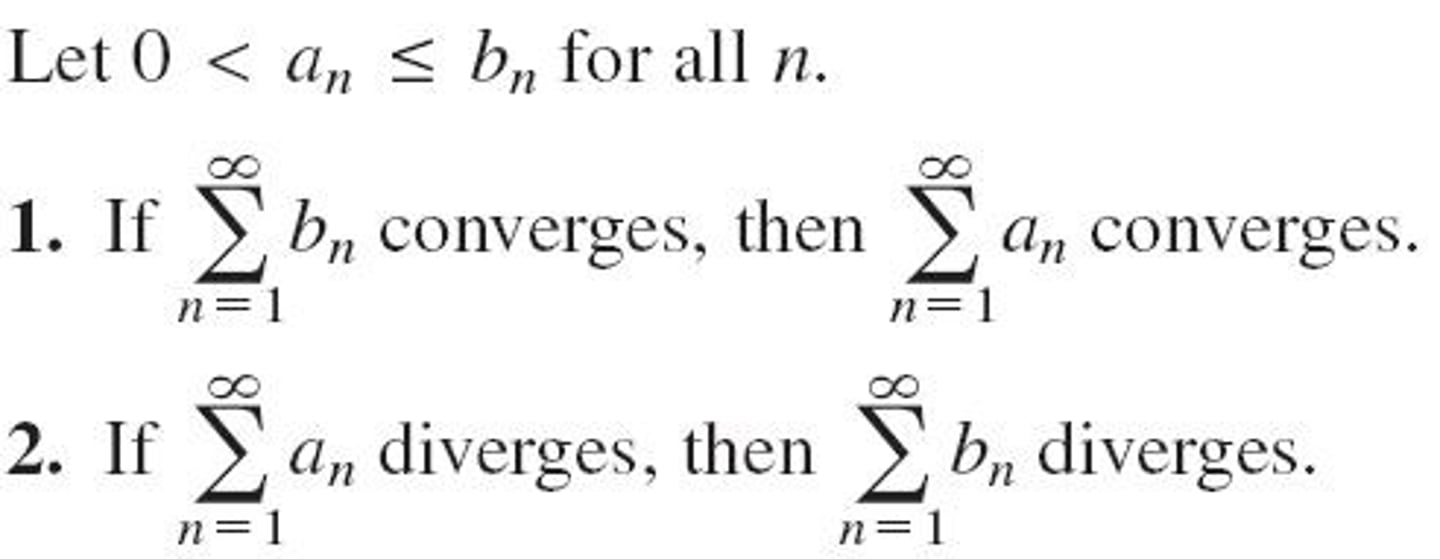
Direct Comparison Test
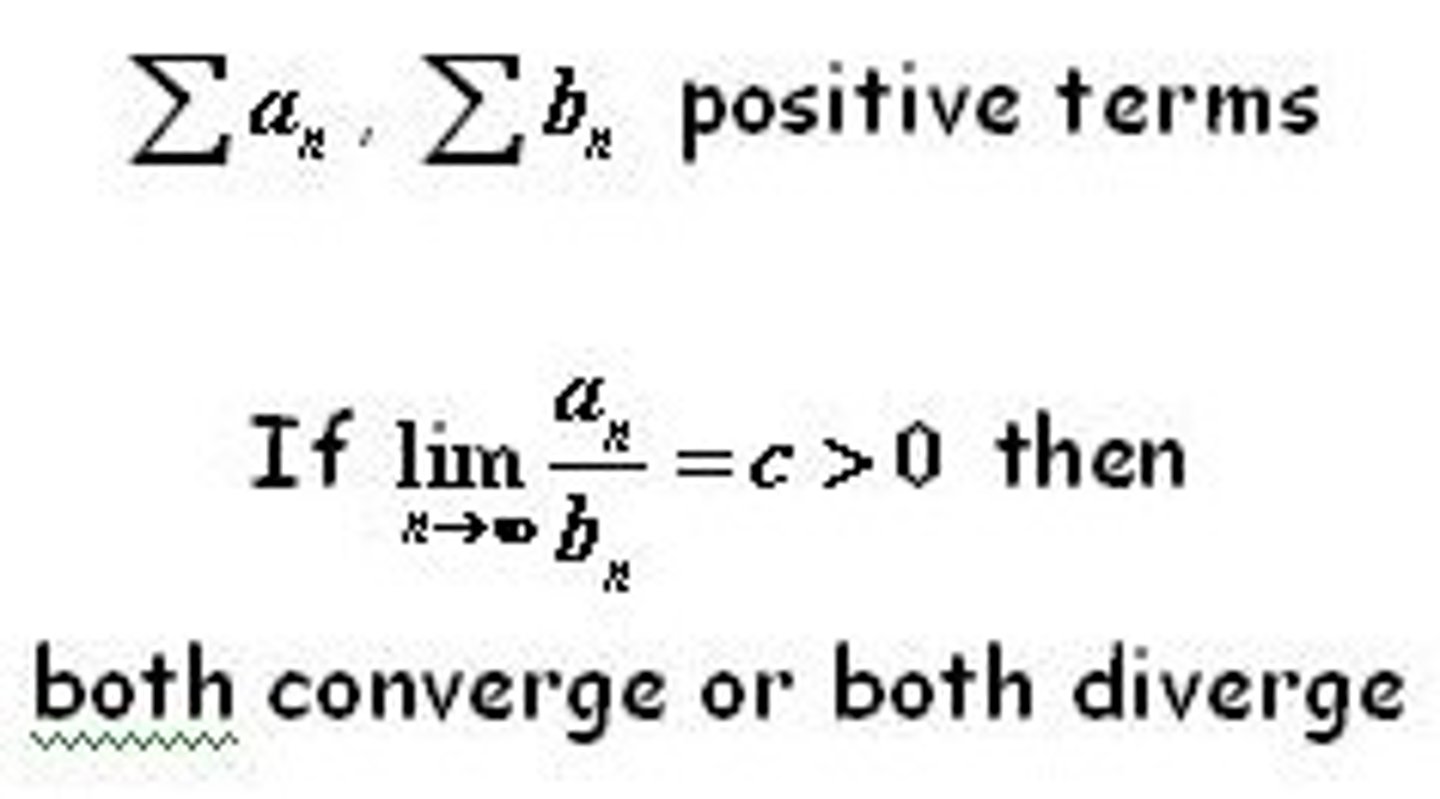
Limit Comparison Test
Ratio Test
lim n-> inf |(An+1 / An)| < 1 series converges
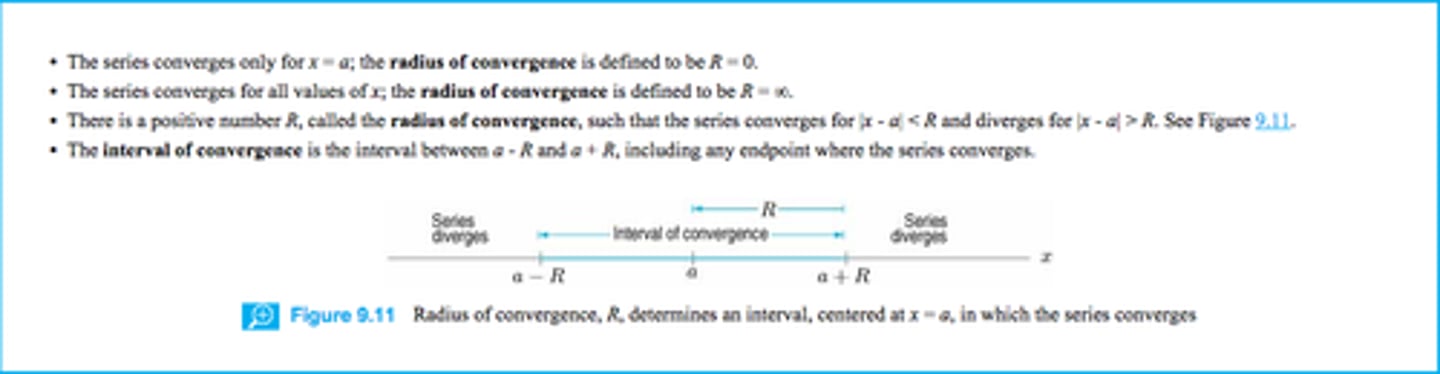
Interval of Convergence
Determined using ratio of convergence
Power Series
sum from n to infinity of (a*x^x)
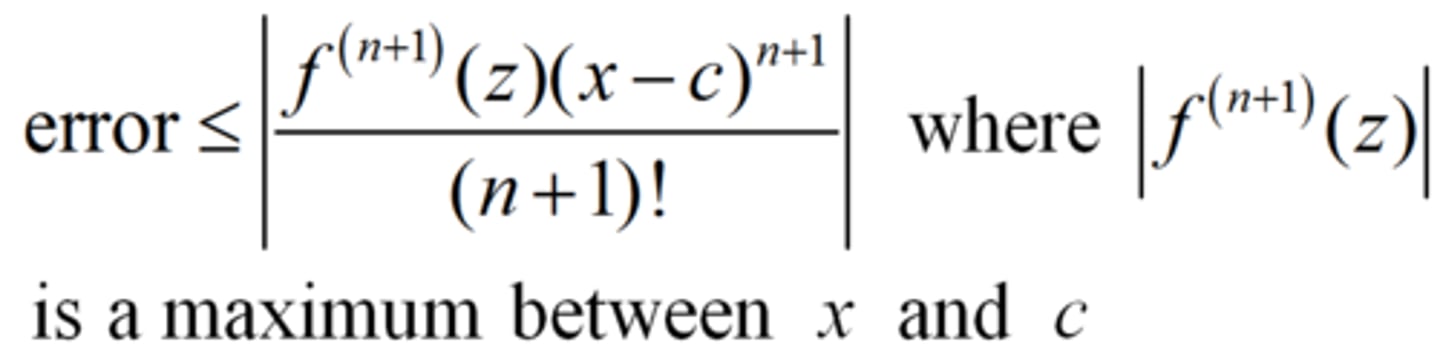
Lagrange Error Bound