11.4 Torque Vector/11.5 Angular Momentum Vector
1/4
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai | Chat |
|---|
No analytics yet
Send a link to your students to track their progress
5 Terms
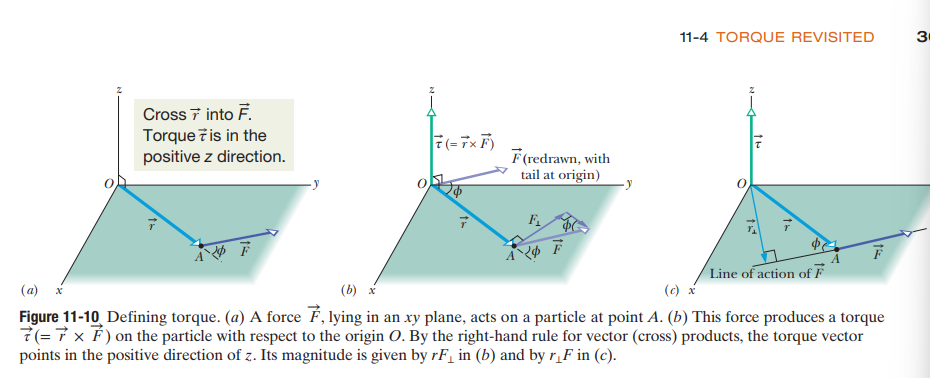
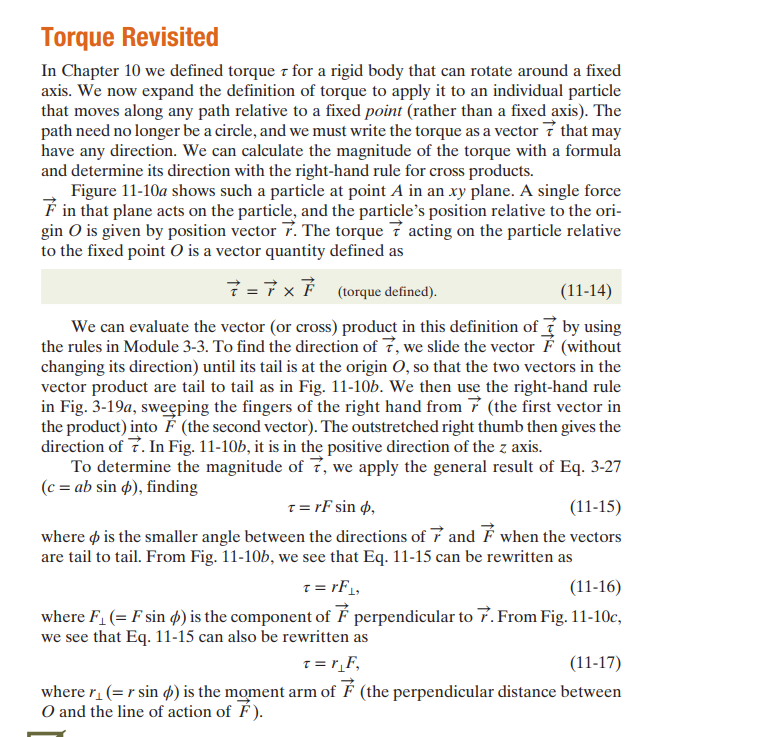
Vector Definition of Torque
As a vector, torque is defined as the cross product of the radial vector and force vector on a particular particle. The torque vector will always be perpendicular to the pivot point of the particle (since cross vectors are always perpendicular to their respective vectors).
Magnitude of the Torque Vector
Recall that the magnitude of a cross vector is always the product of the magnitudes of the individual vectors and the sin of the angle formed between them.
This is where the definition of torque comes from:
T = rFsin(theta)
Torque Vector Visual
Torque Explained (Visual)
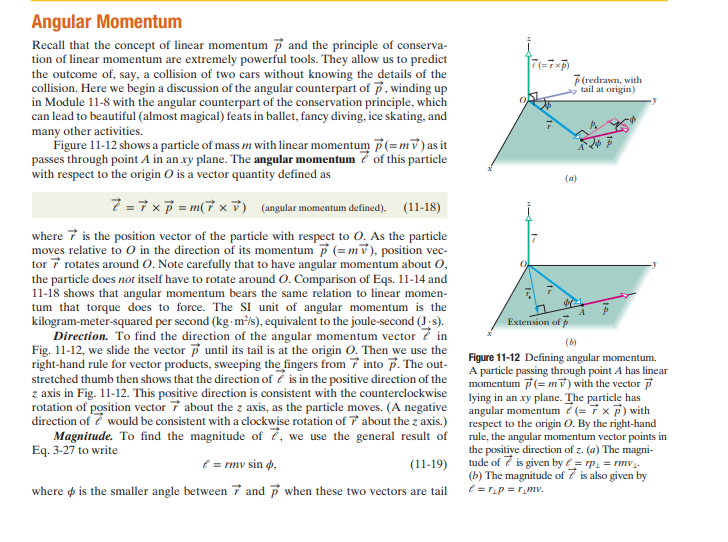
Angular Momentum
In the same way how there exists LINEAR momentum for objects in strictly translational motion, so too does there exist a momentum vector for objects in rotational motion.
Angular momentum is defined in a capacity that is very similar to linear momentum:
L = r x p
L = Angular momentum vector
R = radial vector
P = momentum vector
P = mv (the velocity vector)
Angular momentum can also be defined as:
L = m(r X v)
Angular momentum vector is the cross product of the radial vector and the velocity vector, then also multiplied by the mass of the particle.
The magnitude of the angular momentum vector is defined as
L = (R)(M)(V)sin(theta)
r: radial length
m: particle mass
v: particle velocity
theta: angle between radial and momentum vector