Lineare Algebra 1
1/109
Earn XP
Description and Tags
Vocabulary flashcards covering definitions from the Linear Algebra 1 lecture notes.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
110 Terms
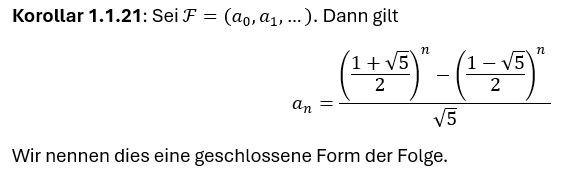
Fibonacci-Folge (𝑎𝑛)𝑛≥0
Definiert durch die Rekursion 𝑎0 = 0, 𝑎1 = 1, 𝑎𝑛 = 𝑎𝑛−1 + 𝑎𝑛−2 für 𝑛 ≥ 2
ℱ𝑎,𝑏
Eine Folge definiert durch die Rekursion 𝑎0 = 0, 𝑎1 = 1, 𝑎𝑛 = 𝑎𝑛−1 + 𝑎𝑛−2 für 𝑛 ≥ 2 wobei 𝑎, 𝑏 ∈ ℝ.
V
Die Menge aller Fibonacci-Folgen, d.h. 𝑉 = {ℱ𝑎,𝑏 ∶ 𝑎, 𝑏 ∈ ℝ}
Summe von ℱ und 𝒢
Definiert als die Folge ℱ + 𝒢 = (𝑎𝑛 + 𝑏𝑛)𝑛≥0, wobei ℱ = (𝑎𝑛)𝑛≥0 und 𝒢 = (𝑏𝑛)𝑛≥0 ∈ 𝑉.
Skalarprodukt von ℱ und 𝛼
Definiert als die Folge 𝛼 ∙ ℱ = (𝛼 ∙ 𝑎𝑛)𝑛≥0, wobei ℱ = (𝑎𝑛)𝑛≥0 ∈ 𝑉 und 𝛼 ∈ ℝ.
Vektorraums über ℝ
V hat die Struktur eines Vektorraums über ℝ, wenn für
ℱ, 𝒢 ∈ 𝑉 gilt ℱ + 𝒢 ∈ 𝑉
ℱ ∈ 𝑉 und 𝛼 ∈ ℝ gilt 𝛼 ∙ ℱ ∈ 𝑉.
Es gilt…
ℱa,b + ℱc,d = ℱa+c + ℱb+d
𝛼 ∙ ℱa,b = ℱ𝛼a,𝛼b
Linearkombination
Die Gleichung schreibt ℱ als eine Linearkombination der Folgen ℱ1,0 und ℱ0,1, so dass ℱ = 𝛼 ∙ ℱ1,0 + 𝛽 ∙ ℱ0,1
Symmetrie von V
Eine Abbildung 𝑇: 𝑉 → 𝑉 ist eine Symmetrie von V, wenn für alle ℱ, 𝒢 ∈ 𝑉 und 𝛼 ∈ ℝ gilt, dass 𝑇(ℱ + 𝒢) = 𝑇(ℱ) + 𝑇(𝒢) und 𝑇(𝛼 ∙ ℱ) = 𝛼 ∙ 𝑇(ℱ). T ist eine lineare Abbildung.
Verschiebungs-Abbildung 𝑆 ∶ 𝑉 → 𝑉
Definiert als (𝑎0, 𝑎1, … ) ↦ (𝑎1, 𝑎2, … )
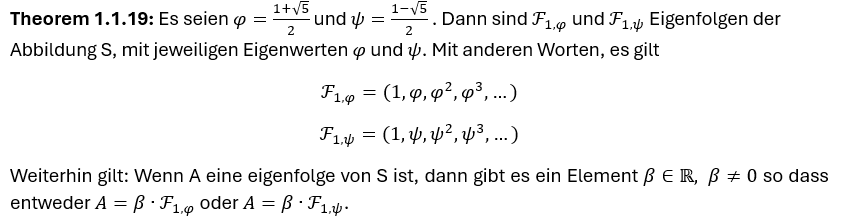
Eigenfolge
Sei 𝑇 ∶ 𝑉 → 𝑉 eine Symmetrie. Eine Folge ℱ ∈ 𝑉, ℱ ≠ ℱ0,0 ist eine Eigenfolge, wenn es ein Element 𝛼 ∈ ℝ gibt so dass 𝑇(ℱ) = 𝛼 ∙ ℱ. In diesem Fall heisst 𝛼 der Eigenwert der Folge ℱ.
Eigenfolge der Abbildung S
Geschlossene Form der Folgen
Menge
Eine Sammlung von Objekten. Die Objekte heissen die Elemente dieser Menge.
𝑥 ∈ 𝑀
y /∈ M
x ist ein Element von M.
y ist kein Element von M.
Regeln der Mengen
Reihenfolg speilt keine Rolle
Wiederholungen werden ignoriert
Mengen können Elemente von Mengen sein
Eine Menge muss nicht umbedingt Elemente der gleichen Art enthalten.
𝑀 = {𝑥 ∶ 𝐴(𝑥)} oder {𝑥 | 𝐴(𝑥)}
Die Menge aller x mit einer bestimmen Eigenschaft A(x).
𝑃 ⊆ 𝑄
P ist eine Unter- oder Teilmenge von Q, wenn für alle 𝑥 ∈ 𝑃 gilt: 𝑥 ∈ 𝑄.
𝑃 ⊊ 𝑄
P ist eine strikte Unter- oder Teilmenge von Q, wenn 𝑃 ⊆ 𝑄 und 𝑃 ≠ 𝑄.

P keine Teilmenge von Q
𝑃 ∩ 𝑄
Die Schnittmenge von P und Q, definiert als {𝑥| 𝑥 ∈ 𝑃 und 𝑥 ∈ 𝑄}
Elemente die sowohl in P und in Q sind
𝑃 ∪ 𝑄
Die Vereinigungsmenge von P und Q, definiert als {𝑥| 𝑥 ∈ 𝑃 oder 𝑥 ∈ 𝑄}
Elemente die in P oder in Q sind
𝑃 − 𝑄
P ohne Q, definiert als {𝑥| 𝑥 ∈ 𝑃 und 𝑥 ∉ 𝑄}
Elemente die nur in P sind.
𝑄𝑐
Das Komplement von Q (in P)
wenn Q eine Teilmenge von P ist, dann nennen wir P ohne Q das Komplement von Q (in P)
Cartesisches Produkt von X und Y
Die Menge aller geordneten Paare (𝑥, 𝑦) mit 𝑥 ∈ 𝑋 und 𝑦 ∈ 𝑌: 𝑋 × 𝑌 = {(𝑥, 𝑦) ∶ 𝑥 ∈ 𝑋, 𝑦 ∈ 𝑌}
Das ist einfach die Menge aller möglichen geordneten Paare, bei denen das erste Element aus X kommt und das zweite aus Y.
n-fache Cartesische Produkt von X
Die Menge 𝑋𝑛 = {(𝑥1, … , 𝑥𝑛) ∶ 𝑥1, … , 𝑥𝑛 ∈ 𝑋}
Für eine Menge X ist das n-fache kartesische Produkt Xn die Menge aller n-Tupel, also geordneter Listen mit nnn Einträgen aus X.
Funktion (oder Abbildung) 𝑓: 𝑋 → 𝑌
Eine Relation, die jedem Element 𝑥 ∈ 𝑋 genau ein Element 𝑓(𝑥) ∈ 𝑌 zuordnet; wir schreiben 𝑥 ↦ 𝑓(𝑥).
𝑋 ist die Definitionsmenge und 𝑌 die Zielmenge.
Gleiche Funktionen
Zwei Funktionen f : X → Y und g : X’ → Y’ sind genau gleich, wenn X = X’ , Y = Y’ und f (x) = g (x) für alle 𝑥 ∈ 𝑋 .
Beschränkung von f auf A
Die Funktion 𝑓|𝐴 ∶ 𝐴 → 𝑌, 𝑓|𝐴(𝑥) = 𝑓(𝑥) 𝑓ü𝑟 𝑥 ∈ 𝐴, wobei 𝐴 ⊆ 𝑋.
Injektiv
𝑓 ist Injektiv, wenn für alle 𝑥1, 𝑥2 ∈ 𝑋 mit 𝑥1 ≠ 𝑥2 𝑔𝑖𝑙𝑡 𝑓(𝑥1) ≠ 𝑓(𝑥2).
Verschiedene Eingaben ergeben verschiedene Ausgaben.
Gleiche Eingaben ergeben gleiche Ausgaben
Surjektiv
𝑓 ist surjektiv, wenn für alle 𝑦 ∈ 𝑌 es mindestens ein 𝑥 ∈ 𝑋 gibt, so dass 𝑓(𝑥) = 𝑦.
Jeder Wert in Y wird mindestens einmal getroffen.
Bijektiv
𝑓 ist bijektiv, wenn f Injektiv und surjektiv ist; mit anderen Worten, für alle 𝑦 ∈ 𝑌 gibt es genau ein 𝑥 ∈ 𝑋, so dass 𝑓(𝑥) = 𝑦.
Perfekte Zuordnung: Jeder y hat genau ein x
Inverse Funktion 𝑓−1:𝑌 → 𝑋
Die Funktion, die einem Element 𝑦 ∈ 𝑌 das eindeutig bestimmte Elemente 𝑥 ∈ 𝑋 zuordnet, für das gilt 𝑓(𝑥) = 𝑦, wenn 𝑓: 𝑋 → 𝑌 bijektiv ist.
Funktionskomposition und Reihenfolge
Gegeben seien zwei Funktionen f:X→Y und g:Y→Z. Dann ist die Komposition g∘f definiert und bildet x∈X auf g(f(x))∈Z ab. Die umgekehrte Komposition f∘g ist nur dann definiert, wenn Z = X gilt.
Selbst wenn beide Kompositionen möglich sind, gilt im Allgemeinen:
f∘g ≠ g∘f
Das bedeutet, dass die Reihenfolge der Funktionsauswertung wichtig ist – die Funktionskomposition ist nicht kommutativ.
Eigenschaften von Funktionskompositionen
Seien f:X→Y und g:Y→Zzwei Funktionen. Dann gelten folgende Aussagen über die Komposition g∘f:
Wenn sowohl f als auch g injektiv sind, dann ist auch g∘f injektiv.
Wenn sowohl f als auch g surjektiv sind, dann ist auch g∘f surjektiv.
Wenn sowohl f als auch g bijektiv sind, dann ist auch g∘f bijektiv.
Diese Aussagen zeigen, dass Injektivität, Surjektivität und Bijektivität beim Zusammensetzen von Funktionen erhalten bleiben – wenn beide Funktionen diese Eigenschaft besitzen.
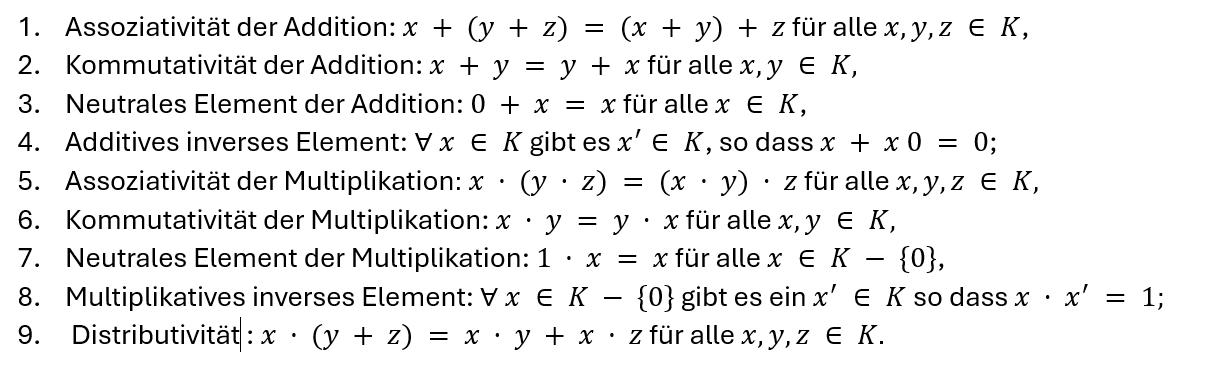
Körper
Eine Menge 𝐾 ≠ ∅ mit zwei Abbildungen
+∶ 𝐾 × 𝐾 → 𝐾 (Addition) und
∙ ∶ 𝐾 × 𝐾 → 𝐾 (Multiplikation)
und zwei ausgezeichneten Elementen 0, 1 ∈ 𝐾 mit 0 ≠ 1, die bestimmte Eigenschaften erfüllen
𝔽𝑝
Der Körper definiert als die Elemente {0, . . . , 𝑝 − 1} für eine Primzahl p. Für 𝑥, 𝑦 ∈ 𝔽𝑝 definieren wir 𝑥 + 𝑦 ∈ 𝔽𝑝 (bzw. 𝑥𝑦 ∈ 𝔽𝑝) als den Rest, der bei der Division durch p entsteht.
Ist ein Körper
Schwierigkeit zu zeigen: Existenz eines multiplikativen inversen
Multiplikatives Inverse von 𝔽𝑝
Sei x∈𝔽𝑝 ein von null verschiedenes Element. Dann existiert ein y∈𝔽𝑝, sodass gilt:
x⋅y=1
Man nennt dieses y das multiplikative Inverse von x und schreibt:
y=x−1
Das bedeutet: In jedem endlichen Körper 𝔽𝑝 (mit p Primzahl) hat jedes x≠0 ein Inverses bezüglich der Multiplikation.
Die Menge 𝔽𝑝×= 𝔽𝑝∖{0} ist also eine Gruppe unter der Multiplikation.
Kommutativer Ring
Eine Menge ℝ mit Operationen + und ·, die alle Axiome aus Definition 2.1.1 ausser 8 erfüllen.
Ebenso ist die Menge der Reste, die bei Division durch n entstehen, ein kommutativer Ring, der genau dann ein Körper ist, wenn n eine Primzahl ist
(𝑚 × 𝑛) Matrix A
Eine Tabelle mit m Zeilen und n Spalten, deren Einträgen Elemente von K sind.

Zeilenvektor
Eine (1 × 𝑛) Matrix.
Spaltenvektor
Eine (𝑚 × 1) Matrix.
Nullmatrix
Die Nullmatrix 0m×n ist die m×n-Matrix, in der alle Einträge gleich Null sind. Sie wird als:
0m×n
notiert.
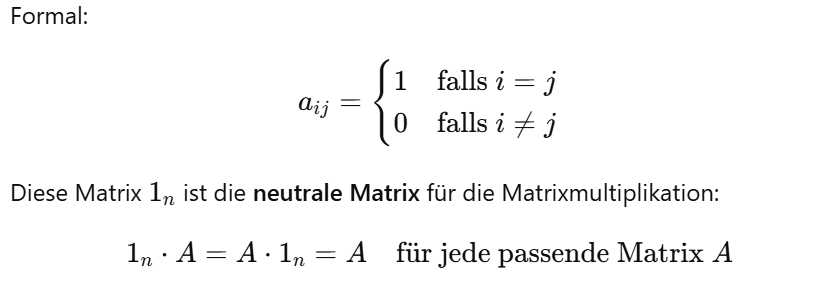
Einheitsmatrix
Die Einheitsmatrix 1n ist die quadratische n×n-Matrix, bei der auf der Diagonalen alle Einträge gleich 1 sind, und alle anderen Einträge gleich 0.
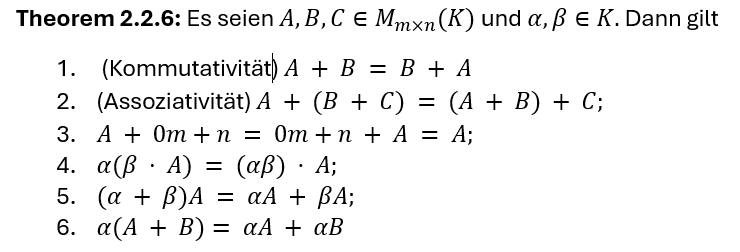
Summe 𝐴 + 𝐵
Die (𝑚 × 𝑛) Matrix (𝑐𝑖𝑗) mit 𝑐𝑖𝑗 = 𝑎𝑖𝑗 + 𝑏𝑖𝑗, wobei 𝐴 = (𝑎𝑖𝑗) und 𝐵 = (𝑏𝑖𝑗) Elemente von 𝑀𝑚×𝑛(𝐾) sind.
Skalarprodukt 𝛼 ∙ 𝐴
Die Matrix mit Einträgen (𝛼𝑎𝑖𝑗), wobei 𝐴 = (𝑎𝑖𝑗) ∈ 𝑀𝑚×𝑛(𝐾) und 𝛼 ∈ 𝐾.
Rechenregeln für Matrizen
Produkt 𝐴𝐵
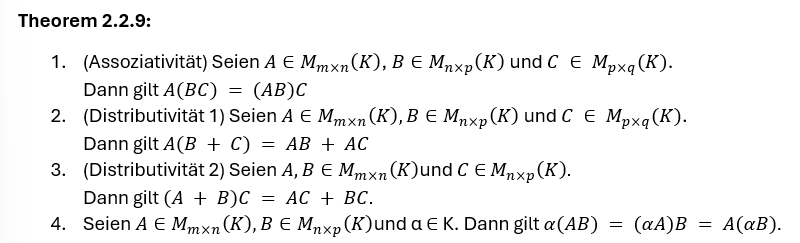
Die (𝑚 × 𝑝)-Matrix 𝐶 = (𝑐𝑖𝑘) mit 𝑐𝑖𝑘 = ∑𝑎𝑖𝑗𝑏𝑗𝑘, wobei 𝐴 ∈ 𝑀𝑚×𝑛(𝐾) und 𝐵 ∈ 𝑀𝑛×𝑝(𝐾).
Beachte: Die beiden Produkte AB und BA sind dann und nur dann definiert, wenn n = p. In diesem Fall ist AB ∈ 𝑀m×m(𝐾) und BA ∈ 𝑀n×n(𝐾)
Rechenregeln für Matrixmultiplikation
Kommutierende Matrizen
Zwei Matrizen A,B ∈ Mn×n(K) kommutieren, wenn gilt:
AB=BA
Diagonale Matrix
Eine Matrix 𝐴 = (𝑎𝑖𝑗) ∈ 𝑀𝑛×𝑛(𝐾), falls (𝑎𝑖𝑗) = 0 für alle 𝑖 ≠ 𝑗.
Obere Dreiecksmatrix
Eine Matrix 𝐴 = (𝑎𝑖𝑗) ∈ 𝑀𝑛×𝑛(𝐾), falls (𝑎𝑖𝑗) = 0 für alle 𝑖 > 𝑗.
Untere Dreiecksmatrix
Eine Matrix 𝐴 = (𝑎𝑖𝑗) ∈ 𝑀𝑛×𝑛(𝐾), falls (𝑎𝑖𝑗) = 0 für alle 𝑖 < 𝑗.
Invertierbare Matrix
Eine (𝑛 × 𝑛)-Matrix 𝐴 ∈ 𝑀𝑛×𝑛(𝐾) ist invertierbar, wenn es eine (𝑛 × 𝑛)-Matrix 𝐵 ∈ 𝑀𝑛×𝑛(𝐾) gibt, so dass 𝐴𝐵 = 𝐵𝐴 = 1𝑛.
Diese Matrix B nennt man die inverse Matrix von A, und man schreibt sie als:
A−1
Die Inverse ist also eindeutig bestimmt – es kann nur eine Matrix B geben, die A genau „rückgängig“ macht.
Inverse eines Matrixprodukts
Seien A und B zwei invertierbare n×n-Matrizen. Dann gilt für das Produkt AB:
(AB)−1=B−1A−1
Die Reihenfolge kehrt sich beim invertieren um
Elementare Zeilenumformungen (EZU)
Operationen auf eine (𝑚 × 𝑛)-Matrix 𝐴:
𝑃(𝑟, 𝑠): Vertauschen der Zeilen r und s;
𝑀(𝑟, 𝜆): Multiplikation der Zeile r mit λ;
𝑆(𝑟, 𝑠, 𝜆): Addition von 𝜆 × (Zeile 𝑟) zur Zeile s.
Zeilen-äquivalent
Zwei Matrizen 𝐴 und 𝐴−1 sind zeilen-äquivalent, wenn wir 𝐴−1 durch die Anwendung von endlich vielen (EZU)s auf A erhalten.
Jede Matrix ist zeilen-äquivalent zu einer Matrix in reduzierter Zeilenstufenform.
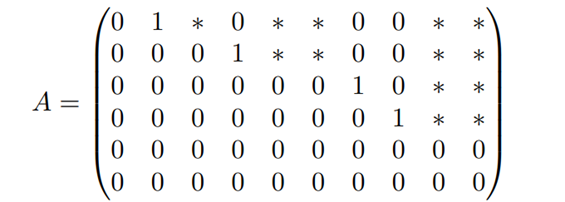
Reduzierte Zeilenstufenform RZSF
Eine (𝑚 × 𝑛) Matrix A ist in reduzierter Zeilenstufenform, wenn:
1. 𝐴 ist in reduzierter Zeilenform;
2. alle Nullzeilen liegen unter den nicht-Nullzeilen;
3. die führende 1 einer Zeile liegt rechts von der führenden 1 der Zeile darüber.
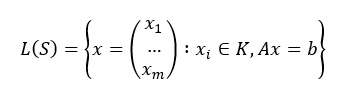
Lineares Gleichungssystem
Ein System von 𝑚 Gleichungen mit 𝑛 Unbekannten 𝑥𝑗, ausgedrückt in Matrizenform als 𝐴𝑥 = 𝑏.

𝐿(𝑆)
Die Lösungen des Gleichungssystems
Das lineare Gleichungssystem Ax = b ist durch die erweiterte Matrix A|b vollständig bestimmt.
Wenn b=0, dann schreiben wir A anstatt der erweiterten Matix A|0.
Erweiterte Matrix 𝐴|𝑏
Die (𝑚 × (𝑛 + 1))-Matrix, bei der der Spaltenvektor 𝑏 als (𝑛 + 1)ste Spalte der Matrix A hinzugefügt wird.
Homogenes lineares Gleichungssystem
Ein lineares Gleichungssystem der Form 𝐴𝑥 = 0.
Zeilenäquivalente Gleichungssysteme
Gegeben seien zwei lineare Gleichungssysteme:
(S):Ax=b(S)
(S′):A′x=b′(S')
mit jeweils m Gleichungen in n Unbekannten.
Wenn die erweiterten Matrizen A′∣b′ und A∣b zeilenäquivalent sind (d. h. durch elementare Zeilenumformungen ineinander überführbar), dann haben die Systeme denselben Lösungsraum:
L(S′)=L(S)
Das bedeutet: Zeilenumformungen verändern die Lösungsmenge eines LGS nicht.
Lösbarkeitsfall eines LGS abhängig von Bedingung
Fall 1:
Wenn b3−b2+2b1≠0 dann ist das System nicht lösbar: L(S)=∅
Fall 2:
Wenn
b3−b2+2b1=0
dann besitzt das System eine Lösungsmenge, die durch freie Variablen beschrieben ist:
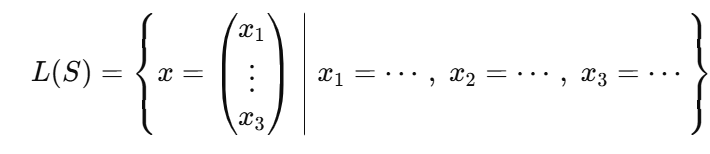
Vektorraum über 𝐾
Eine Menge 𝑉 mit zwei Operationen
+∶ 𝑉 × 𝑉 → 𝑉
×∶ 𝐾 × 𝑉 → 𝑉,
die bestimmte Bedingungen erfüllen:

VR3: Es gibt genau ein Element mit der Eigenschaft (VR3), wir nennen es die additive Identität von V.
VR4: Das Element ist in (VR4) eindeutig bestimmt, es heisst das (additive) Inverse von .
VR6: Vektor Addition
VR7: Skalar-Multiplikation
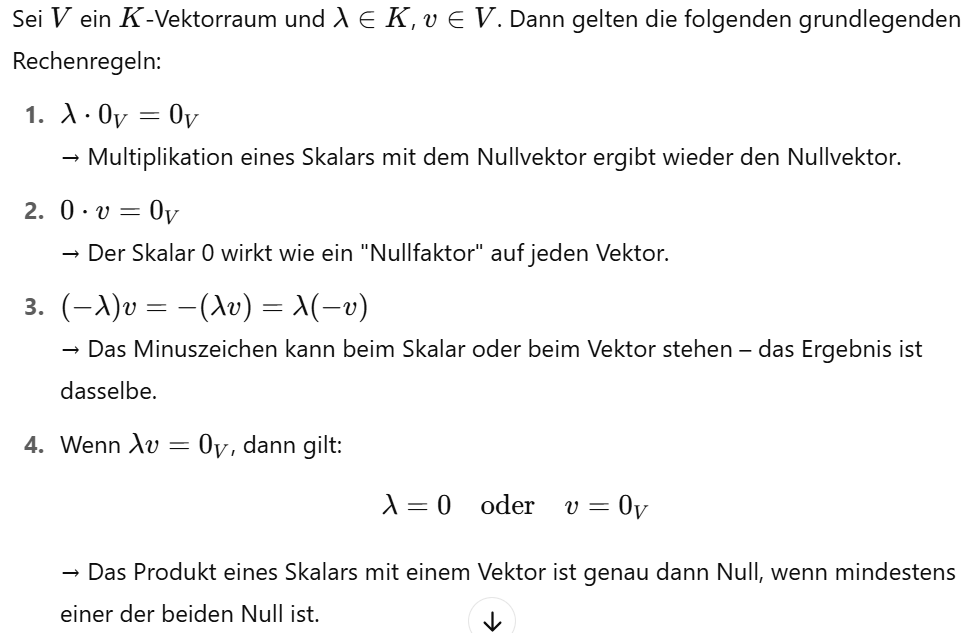
Rechenregeln im Vektorraum mit Nullvektor
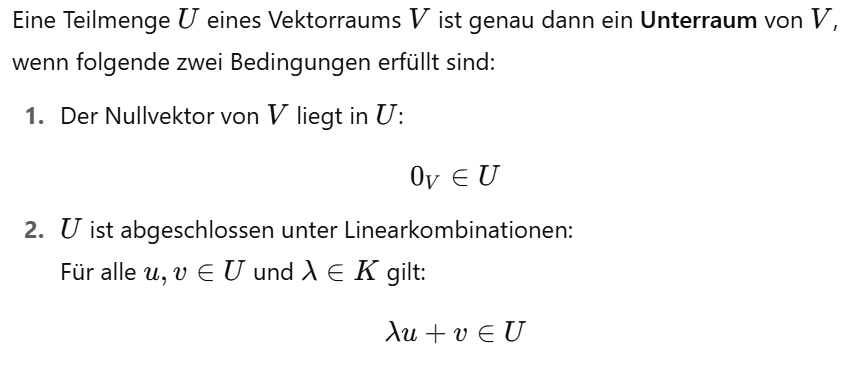
Unterraum
Eine Teillmenge 𝑈 ⊆ 𝑉 ist ein Unterraum, wenn 𝑈 ≠ ∅ und wenn sie bezueglich Addition und Skalar-Multiplikation abgeschlossen ist
Also:

Wir schreiben U ≤ V.
Kriterium für Unterräume: U≤V
Lineare Hülle
Der von 𝑣1, . . . , 𝑣𝑛 erzeugten Unterraum, 〈𝑣1, … , 𝑣𝑛〉 = {𝜆1𝑣1 + ⋯ + 𝜆𝑛𝑣𝑛 ∶ 𝜆𝑖 ∈ 𝐾 ∀1 ≤ 𝑖 ≤ 𝑛}
Linearkombination von 𝑣1, … , 𝑣𝑛
Ein Element der Form 𝜆1𝑣1 + ⋯ + 𝜆𝑛𝑣𝑛 mit 𝜆𝑖 ∈ 𝐾.
Endlich-dimensional
V ist endlich-dimensional, wenn es endlich viele Vektoren 𝑣1, … , 𝑣𝑛 ∈ 𝑉 gibt so dass 𝑉 = 〈𝑣1, … , 𝑣𝑛〉
Erzeugendessystem
𝑣1, … , 𝑣𝑛 ∈ 𝑉 wenn 𝑉 = 〈𝑣1, … , 𝑣𝑛〉
Linear unabhängig
𝑣1, … , 𝑣𝑛 ∈ 𝑉 sind linear unabhängig, wenn sich 0𝑉 eindeutig als Linearkombination dieser Vektor darstellen lässt, nämlich 0𝑉 = 0𝑒1 + ⋯ + 0𝑣𝑛
Basis von V
Ein linear unabhängiges Erzeugenden System von V.
Dimension von V
Die Anzahl von Elementen einer Basis von V; wir schreiben dim𝐾 𝑉.
Komplement von U
Ein Unterraum 𝑊 ≤ 𝑉 ist ein Komplement zu U wenn 𝑉 = 𝑈 + 𝑊 und 𝑈 ∩ 𝑊 = {0}.
Lineare Abbildung
Eine Funktion 𝑇 ∶ 𝑉 → 𝑊 zwischen Vektorräume über K, die folgende Bedingungen erfüllt: 1. 𝑇(𝑣1 + 𝑣2) = 𝑇(𝑣1) + 𝑇(𝑣2) für alle 𝑣1, 𝑣2 ∈ 𝑉 ; 2. 𝑇(𝛼𝑣) = 𝛼 𝑇(𝑣) für all 𝑣 ∈ 𝑉 , 𝛼 ∈ 𝐾.
Endomorphismus
Eine lineare Abbildung 𝑇 ∶ 𝑉 → 𝑉
Kern von T
ker(𝑇) = {𝑣 ∈ 𝑉 ∶ 𝑇(𝑣) = 0𝑤} ⊆ 𝑉
Bild von T
𝑖𝑚(𝑇) = {𝑇(𝑣) ∶ 𝑣 ∈ 𝑉} ⊆ 𝑊
Rang von T
Der Rang 𝑟𝑘(𝑇) von T ist dim𝐾 𝑖𝑚(𝑇).
Isomorphismus
Eine lineare Abbildung 𝑇 ∶ 𝑉 → 𝑊, wenn es eine lineare Abbildung 𝑆 ∶ 𝑊 → 𝑉 gibt, so dass 𝑆 ◦ 𝑇 = 𝑖𝑑𝑉 und 𝑇 ◦ 𝑆 = 𝑖𝑑𝑊
Abbildungsmatrix von T bezüglich der Basen B und C
Die Matrix [𝑇]𝐶 𝐵 = (𝑎𝑖𝑗 ) ∈ 𝑀𝑚×𝑛(𝐾), deren Einträge definiert sind durch 𝑇(𝑣𝑗) = ∑𝑎𝑖𝑗𝑤𝑖
Basiswechselmatrix
Die Matrix 𝐴 = [𝑖𝑑]𝐵′ 𝐵, deren Eintraege definiert sind durch die Gleichungen 𝑣𝑗 = ∑𝑎𝑖𝑗𝑣𝑖 ′
Ähnliche Matrizen
Zwei Matrizen 𝐴, 𝐵 ∈ 𝑀𝑛 × 𝑛(𝐾) sind ähnlich, wenn es eine invertierbare Matrix 𝑃 ∈ 𝑀𝑛×𝑛(𝐾) gibt, so dass 𝐵 = 𝑃−1 · 𝐴 · 𝑃.
Äquivalente Matrizen
Zwei Matrizen 𝐴, 𝐵 ∈ 𝑀𝑚×𝑛(𝐾) sind äquivalent, wenn es invertierbare Matrizen 𝑃 ∈ 𝑀𝑚×𝑚(𝐾) 𝑢𝑛𝑑 𝑄 ∈ 𝑀𝑛×𝑛(𝐾) gibt, so dass 𝐵 = 𝑃 · 𝐴 · 𝑄.
Koordinaten
Die Einträge des Vektors (𝛼1 … 𝛼𝑛) ∈ 𝐾𝑛, wenn 𝑢 = 𝛼1𝑣1 + · · · + 𝛼𝑛𝑣𝑛
Zeilenrang(A)
dim𝐾 𝑍𝑒𝑖𝑙𝑒𝑛(𝐴), wobei 𝑍𝑒𝑖𝑙𝑒𝑛(𝐴) = 〈𝑢1, … , 𝑢𝑚〉 ≤ 𝐾𝑛 die Zeilen von A sind.
Spaltenrang(A)
dim𝐾 𝑆𝑝𝑎𝑙𝑡𝑒𝑛(𝐴), wobei 𝑆𝑝𝑎𝑙𝑡𝑒𝑛(𝐴) = 〈𝑣1, … , 𝑣𝑛〉 ≤ 𝐾𝑚 die Spalten von A sind.
Rang(A)
Der gemeinsame Wert von Zeilen- und Spaltenrang von A.
Transponierte Matrix 𝐵𝑡
Die (𝑛 × 𝑚) − Matrix, deren (𝑖,𝑗) Eintrag durch 𝑏𝑗𝑖 gegeben ist.
Gruppe
Eine Menge G zusammen mit einer Operation ⋆∶ 𝐺 × 𝐺 → 𝐺, die Assoziativität, Existenz eines neutralen Elements und Existenz eines Inversen erfüllt.
Ring
Eine Menge R mit zwei Operationen + (Addition) und × (Multiplikation), die (R, +) als eine abelsche Gruppe, assoziative Multiplikation, ein Element 1𝑅 ∈ 𝑅 für das gilt 1𝑅 × 𝑎 = 𝑎 × 1𝑅 = 𝑎 und distributive Multiplikation bezüglich der Addition erfüllt.
Linearformen
Elemente von 𝑉∗, lineare Abbildungen 𝑉 → 𝐾.
Duale Basis
Die Basis 𝐵∗ = (𝑣1 ∗ , . . . , 𝑣𝑛 ∗), wobei 𝑣𝑖 ∗ ∈ 𝑉∗ wie folgt definiert ist: 𝑣𝑖 ∗ (𝑣𝑗 ) = {1 𝑤𝑒𝑛𝑛 𝑖 = 𝑗 0 𝑤𝑒𝑛𝑛 𝑖 ≠ 𝑗.
Duale Abbildung
𝑇∗ ∶ 𝑊∗ → 𝑉∗ , ℓ ↦ ℓ ◦ 𝑇
Annulator von 𝑈
Die 𝑀enge aller Linearformen von V , die alle Elemente von 𝑈 auf Null abbilden, das heisst 𝑈∘ = {ℓ ∈ 𝑉∗ ∶ ℓ(𝑢) = 0𝑉 ∀ 𝑢 ∈ 𝑈}.
Bidualraum
Der K-Vektorraum 𝑉∗∗ = (𝑉∗)∗
Kommutatives Diagramm
Ein Diagramm, wobei 𝜏𝑉, 𝜏𝑊 mit T kompatibel sind.
Quotientenraum
Die Elemente von 𝑉/𝑈 sind die Nebenklassen von 𝑈 in 𝑉, die Addition und Skalarmultiplikation sind definiert durch [𝑣1] + [𝑣2] = [𝑣1 + 𝑣2] und 𝛼[𝑣] = [𝛼𝑣].