2. Analisi cinematica meccanismi
1/23
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
24 Terms
quale è la differenza tra sintesi cinematica e analisi cinematica
sintesi cinematica: conosco il mio obiettivo di movimento cinematico e devo trovare un meccanismo giusto
analisi cinematica: conosco il meccanismo cinematico e devo trovare il moto
come si puo suddividere la analisi cinematica
analisi di meccanismi a catena aperta // chiusa
analisi di meccanismi con metodi analitici // grafici
analitici ancora divisibili in forma chiusa o soluzione numerica
che cosa è un sistema articolato
un sistema nel piano composto solo da coppie rotoidali
Regola di grashof
quando un quadrilatero si considera di grashof
sia:
a la lunghezza del membro piu corto
b la lunghezza del membro piu lungo
c,d le altre due lunghezze
allora vale:
a+b < c+d —> quadrilateo di grashof
a+b > c+d —> quadrilatero non di grashof
a+b = c+d —> caso limite
quale è la caratterisitca di un quadrilatero di grashof (x2)
in un QL di grashof esiste sempre un membro che puo fare una rotazione completa
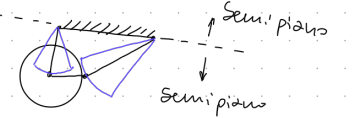
in un QL di grashof ci sono sempre due bilanceri che si muovono in un solo semipiano
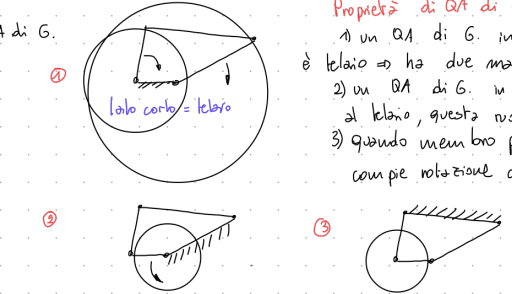
quali 4 casi esistono che aiutano a classificare i QL articolati di grashof
il QL è di grashof e il membro piu corto è il telaio —> il sistema ha due manovelle
il QL è di grashof e il membro piu corto è adiacente al telaio —> questo puo ruotare
il QL è di grashof e il membro piu corto è la biella —> questa compie una rotazione completa
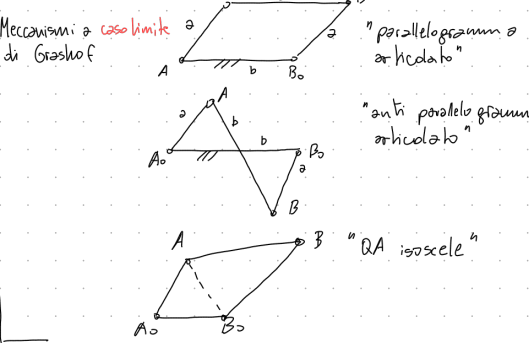
quale è un esempio per il caso limite del quadrilatero di grashof, quanti tipi ci sono e come si chiamano
sono 3:
parallelogramma articolato
antiparallelogramma articolato
QA isoscele
che cosa è un meccanismo omocineico
un maccanismo che ha rapporto di trasmissione unitario
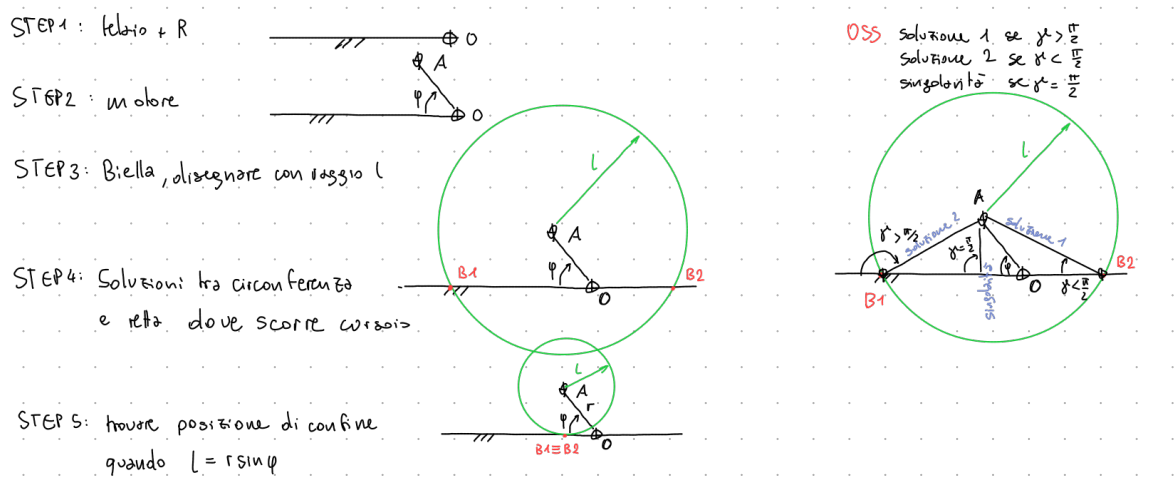
disegnare un quadrilatero articolato conoscendo la geometria per via grafica,
quante soluzioni si hanno a scanso del caso limite
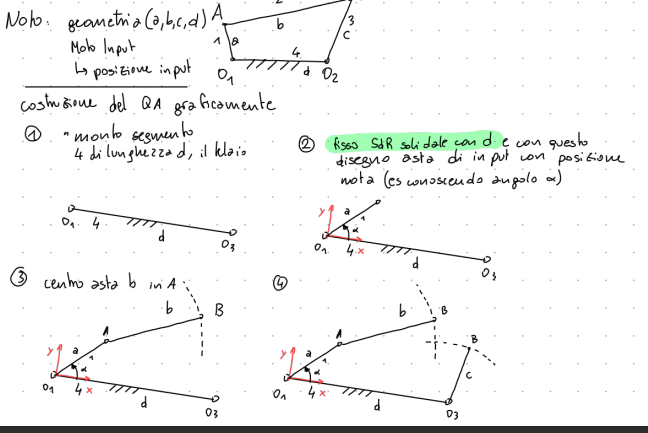
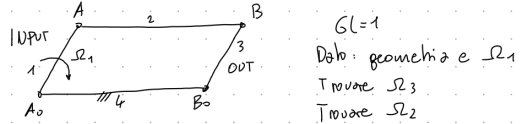
che cosa è la equazione di chiusura per la analisi cinematica di una catena articolata
Prima interpreto ogni membro come un vettore e poi faccio la somma vettoriale e la pongo a zero perche la catena è chiusa:
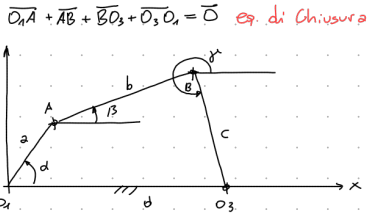
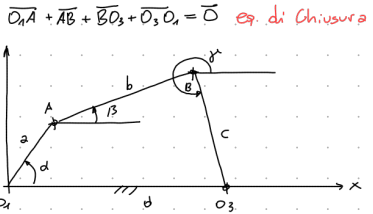
scrivere la equazione di
chiusura
posizione
velocità
accellerazione
proiettata sulle assi x y di questo quadrilatero articolato:
pdf p15
a che cosa bisogna fare attenzione quando si calcolano le equazioni della velocità di un quadrilatero articolato
bisogna risolvere un sistema lineare e percio bisogna assicurarsi che abbia soluzione:
prima si traduce il problema in una moltiplicazione matriciale e poi di fa il determinante della matrice che deve essere diverso da zero
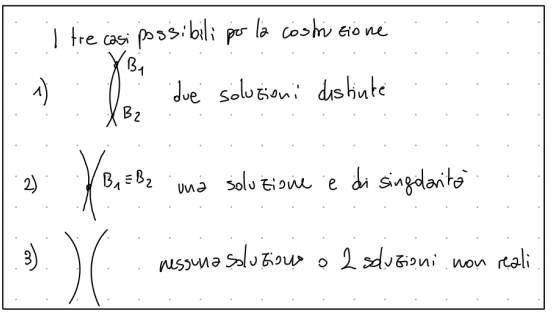
che cosa è una posizione singolare che puo accadere nella costruzione di un quadrilatero articolato
costruiendo un quadrilatero possono accadere tre situazioni:
le equazioni hanno due soluzioni
le equazioni convergono in una soluzione
le equazioni non hanno souzione
a livello grafico è la seguente immagine nella costruzione dell’ultimo membro:
che cosa sono i coefficeinti di velocità
risolvendo il problema di velocità si ottiene un sistema lienare:
A * [a, b] = [R] dove A è la matrice e a,b sono le incognite come le velocità angolari
per risolvere il sistema moltiplico per la inversa di A e ottengo:
[a,b] = [R] * A-1
isolando i termini riesco a ottenere un sistema come in figura, la particolarità è che il vettore delle incognite dipende solamente dalla geometria e dal parametro lagrangiano che definisce lo stato del sistema (in questo caso alpha). dato che
alpha-punto è una costante. il termine che viene moltiplicato da alpha punto si chiamano parametri lagrangiani
![<p>risolvendo il problema di velocità si ottiene un sistema lienare: <br>A * [a, b] = [R] dove A è la matrice e a,b sono le incognite come le velocità angolari </p><p>per risolvere il sistema moltiplico per la inversa di A e ottengo: <br>[a,b] = [R] * A<sup>-1</sup> </p><p>isolando i termini riesco a ottenere un sistema come in figura, la particolarità è che il vettore delle incognite dipende solamente dalla geometria e dal parametro lagrangiano che definisce lo stato del sistema (in questo caso alpha). dato che <br>alpha-punto è una costante. il termine che viene moltiplicato da alpha punto si chiamano parametri lagrangiani</p><p></p>](https://knowt-user-attachments.s3.amazonaws.com/8d640ed9-ad94-4b9b-831f-b6c485ffbef4.png)
derivare i coefficienti di velocità e accelelrazione (p16 pdf)
svolgere una analisi cinematica della velocità di un quadrilatero articolato in modo grafico
p 17
svolgere una analisi cinematica della accellerazione di un quadrilatero articolato in modo grafico
che tipo di meccanismo è un “meccanismo glifo oscillante“. disegnare
un meccanismo glifooscillante è un tipo di manovellismo a spinta
definizione di punto morto superiore e inferiore
le posizioni estreme di un punto che svolge moto oscillatorio
definizione di manovella centrata
una manovella dove il centro di istantanea rotazione del corsoio è sulla asse di movimento
nomencaltura manovella
costruire in modo grafico un meccanismo di manovellismo a spinta,
poi svolgere analisi analitica di posizione, velocita e accellerazioni
isolare coefficienti di velocità e accellerazione
aprozzimare accellerazione, velocità e posizione del cursoio in un meccanismo a manovellismo a spinta
p25