Cálculo III (vectorial)
1/75
Earn XP
Description and Tags
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
76 Terms
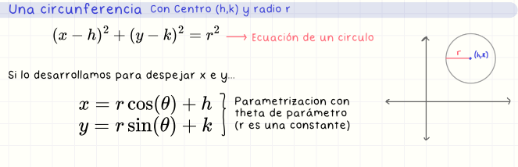
Parametrización de una circunferencia con centro (h,k) y radio r
x = r cos(θ) + h, y = r sin(θ) + k. Es una forma de recorrer la circunferencia usando el ángulo θ como parámetro.
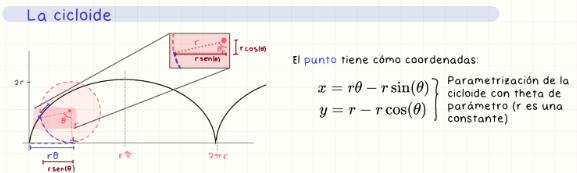
Parametrización de la cicloide
x = rθ − r sin(θ), y = r − r cos(θ). Representa la trayectoria de un punto sobre la circunferencia que rueda sin resbalar sobre una línea recta. Es una curva periódica.
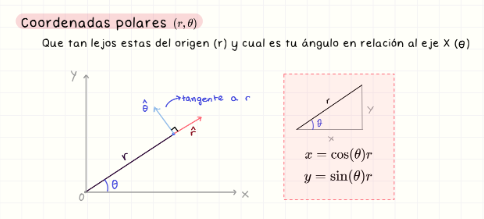
Coordenadas polares
Sistema de coordenadas que representa un punto por su distancia al origen (r) y el ángulo θ respecto al eje x. La relación con coordenadas cartesianas es: x = r cos(θ), y = r sin(θ)
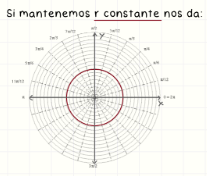
Si r es constante
Describe un círculo de radio fijo, ya que el punto está a una distancia fija del origen.
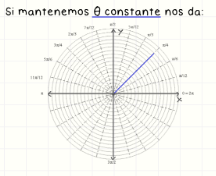
Si θ es constante
Describe una línea recta que pasa por el origen en dirección fija.
Simetría respecto al eje polar
La curva es simétrica si (r, θ) y (r, −θ) pertenecen a ella. Ejemplo: cos(−θ) = cos(θ). Es una reflexión respecto al eje x.

Simetría respecto al origen
La curva es simétrica si (r, θ) y (−r, θ + π) o (r, θ) y (r, θ + π) están en la curva. Implica una rotación de 180° respecto al origen.

Simetría respecto a θ = π/2
La curva es simétrica si (r, θ) y (r, π − θ) pertenecen a la curva. Es una reflexión respecto al eje y.

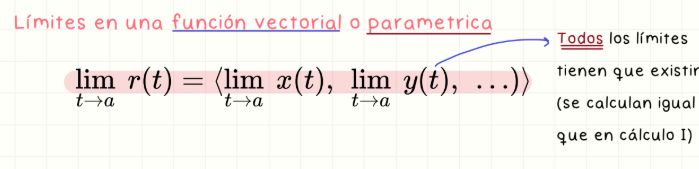
Límite de una función vectorial
El límite de r(t) cuando t → a es el vector formado por los límites de sus componentes. Es necesario que todos existan para que el límite exista.
Continuidad de una función vectorial
Una función vectorial es continua en t = a si el límite de r(t) al acercarse a a es igual al valor r(a). Equivale a la continuidad de cada componente.
Derivada de una curva paramétrica (dy/dx)
Si x = x(t), y = y(t), entonces dy/dx = (dy/dt) / (dx/dt). Esta razón representa la pendiente de la recta tangente a la curva.

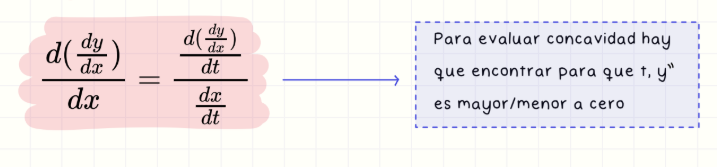
Segunda derivada paramétrica considerando r(t) (d²y/dx²)
La segunda derivada d²y/dx² se calcula como: (d/dt (dy/dx)) / (dx/dt). Se usa para determinar la concavidad de la curva.
Significado de r'(t)
Es el vector tangente a la curva. Representa la dirección y velocidad con la que una partícula se mueve sobre la curva.

Norma de r'(t)
Se interpreta como rapidez o magnitud de la velocidad. Es un número positivo que indica qué tan rápido se recorre la curva sin importar la dirección.
TFC: ∫_b ^a r'(t) dt
∫ r'(t) dt = r(b) − r(a). Representa el desplazamiento neto entre dos puntos en la curva.
Longitud de una curva
Se calcula con ∫ ||r'(t)|| dt. Suma la magnitud de los pequeños desplazamientos para obtener la longitud total recorrida sobre la curva.
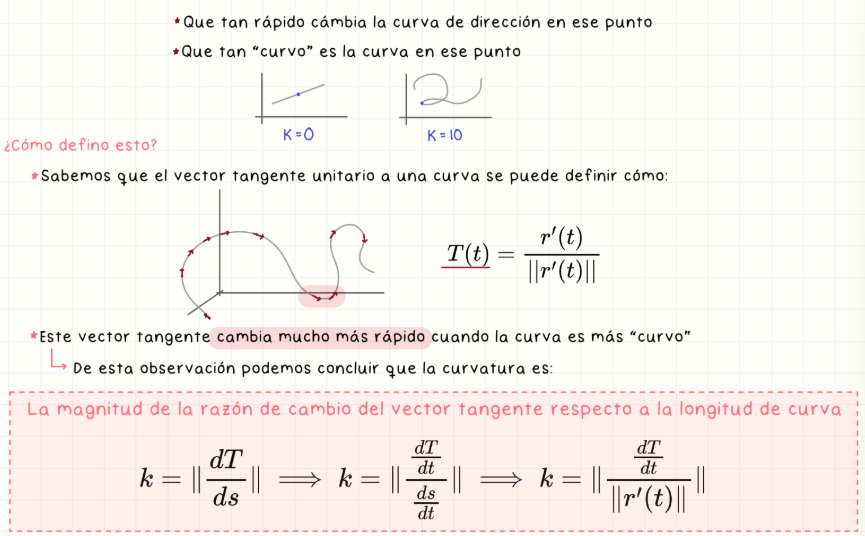
Curvatura (definición con T)
La curvatura k es la razón de cambio del vector tangente unitario respecto a la longitud de arco: k = ||dT/ds|| = ||dT/dt|| / ||r'(t)||. Indica qué tan rápido cambia la dirección.
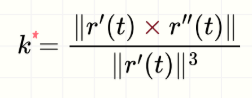
Curvatura (definición alternativa solo con r(t))
Fórmula útil cuando conocemos r'(t) y r''(t), especialmente en coordenadas cartesianas.
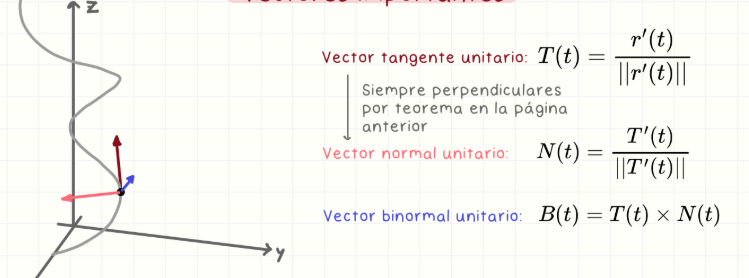
Vector tangente unitario
T(t) = r'(t)/||r'(t)||. Representa la dirección del movimiento sobre la curva. Siempre apunta en la dirección de avance.
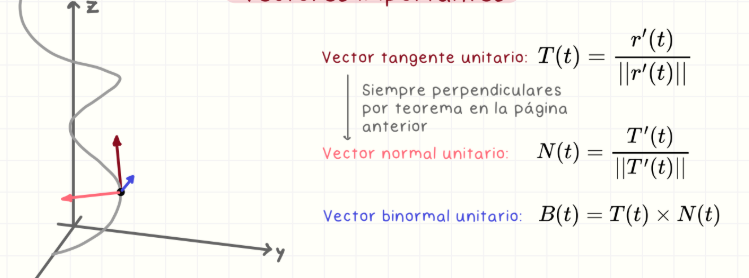
Vector normal unitario
N(t) = T'(t)/||T'(t)||. Indica hacia dónde gira la curva, es perpendicular al vector tangente.
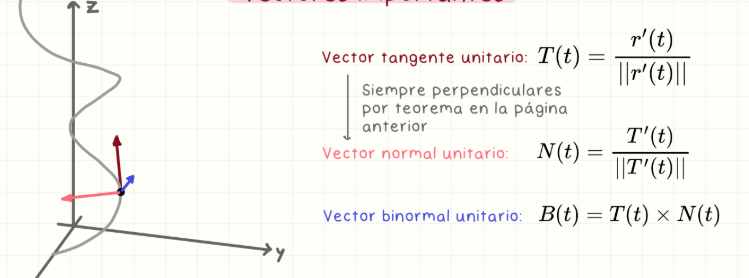
Vector binormal unitario
B(t) = T(t) × N(t). Perpendicular tanto a T como a N. Forma una base ortonormal en el espacio tridimensional.
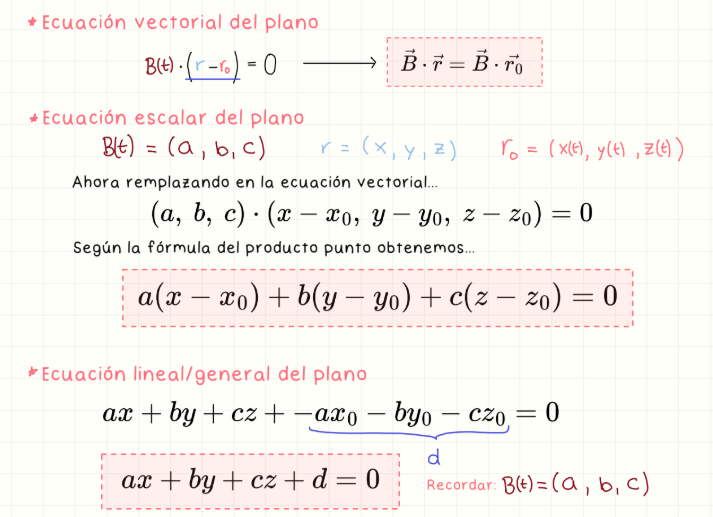
Plano osculador
Plano determinado por T y N en un punto. Es el plano que mejor se ajusta a la curva en ese punto, como si “rozara” la curva.
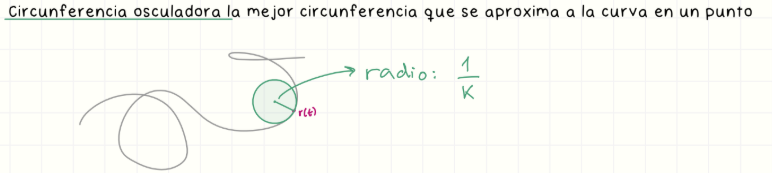
Circunferencia osculadora
Es la circunferencia que mejor se aproxima a la curva en un punto. Su radio es 1/k, donde k es la curvatura.
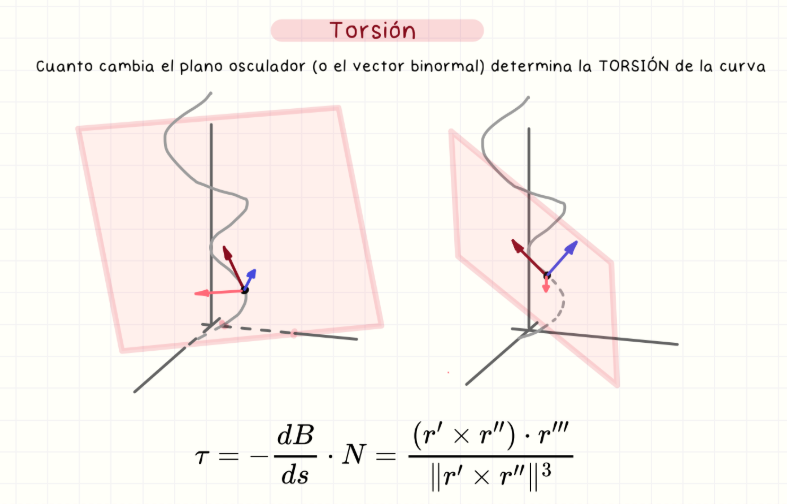
Torsión
Mide cuánto cambia el plano osculador a lo largo de la curva. Se define como τ = −dB/ds · N, o usando triple derivada y producto cruzado.
Fórmulas de Frenet-Serret
Relaciones entre derivadas de T, N y B respecto al arco:
dT/ds = kN
dN/ds = −kT + τB
dB/ds = −τN

Campo escalar
Función que asigna un número real a cada punto del espacio: f: ℝⁿ → ℝ. Ejemplo: temperatura en un punto del espacio.
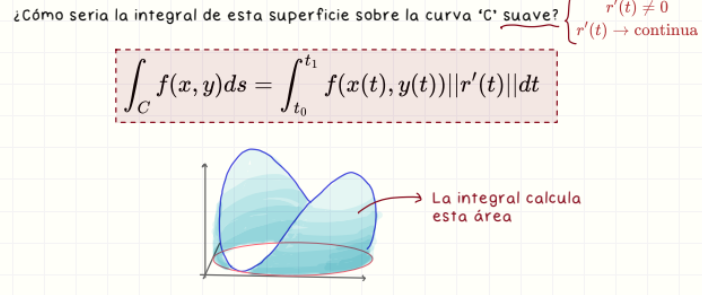
Integral de línea sobre una función escalar
Representa el área "bajo" la curva sobre la superficie z = f(x,y).
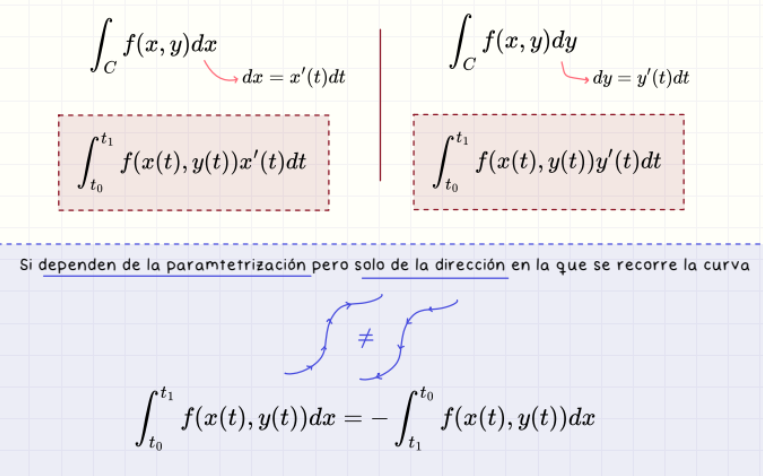
Integral de línea respecto a x e y
∫ f(x,y) dx = ∫ f(x(t), y(t)) x'(t) dt.
∫ f(x,y) dy = ∫ f(x(t), y(t)) y'(t) dt.
Dependen de la orientación de la curva.
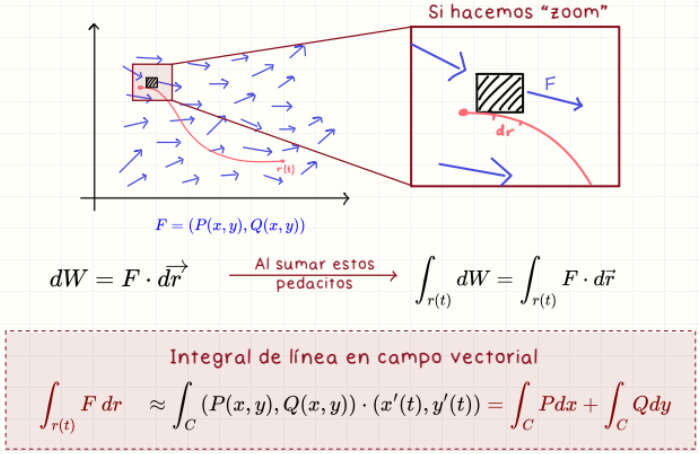
Integral de línea sobre campo vectorial
∫ F·dr = ∫ P dx + Q dy. Representa el trabajo hecho por el campo al recorrer una curva.
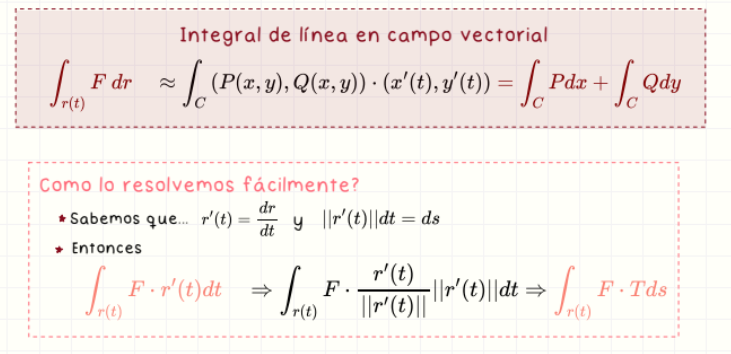
Otras formas de integral de linea sobre campo vectorial
Teorema fundamental del cálculo en campos
Si F es conservativo y F = ∇f, entonces ∫_C F·dr = f(r(t₁)) − f(r(t₀)). La integral solo depende del punto inicial y final.

Conjunto abierto
Un conjunto es abierto si para cualquier punto dentro de él, puedes moverlo ligeramente en cualquier dirección y seguir dentro del conjunto.
Conjunto cerrado
Un conjunto es cerrado si contiene todos sus puntos límite. Ejemplo: incluye su borde.

Conjunto disconexo
Existe una separación entre sus partes. Se puede dividir en dos conjuntos abiertos no vacíos, disjuntos, cuya unión es el conjunto original.

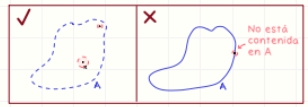
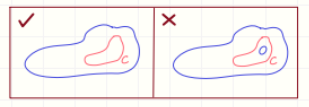
Conjunto simplemente conexo
Es conexo y no tiene agujeros. Toda curva cerrada dentro del conjunto se puede contraer a un punto sin salir del conjunto.
Teorema de equivalencia para curvas en campos conservativos
Para un campo vectorial continuo en un dominio conexo y una curva suave a trozos, se cumple que las siguentes afirmaciones son equivalentes:
F es conservativo.
La integral de línea es independiente del camino.
La integral sobre cualquier curva cerrada contenida en el dominio es cero.
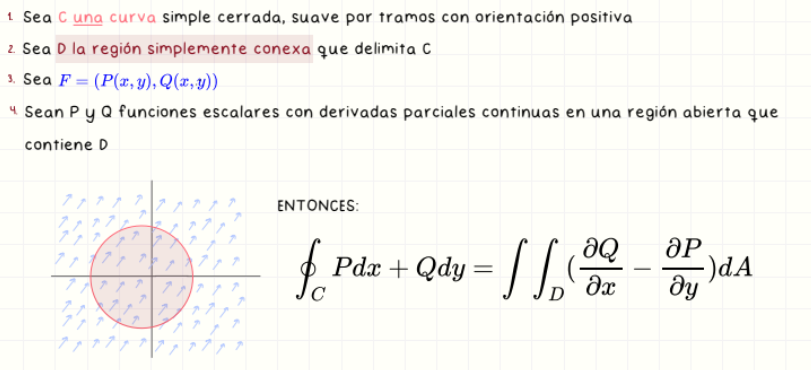
Teorema de Green
Relaciona una integral de línea sobre una curva cerrada con una doble integral sobre la región que encierra:
∮_C P dx + Q dy = ∬D (∂Q/∂x − ∂P/∂y) dA.
Se requiere que la curva sea simple, cerrada, suave por tramos y con orientación positiva.
∇ = (∂/∂x, ∂/∂y, ∂/∂z).
Div(F) = ∇ · F = ∂P/∂x + ∂Q/∂y + ∂R/∂z.
rot(F) = ∇ × F.
Si es cero, el campo no tiene rotación local.
Condición para ser conservativo
Un campo vectorial F es conservativo si y solo si su rotacional es cero en una región simplemente conexa.
Teoremas de identidades vectoriales (div-rot-grad)
div(rot(F)) = 0.
rot(grad(f)) = 0.
Estas son propiedades algebraicas de los operadores vectoriales.
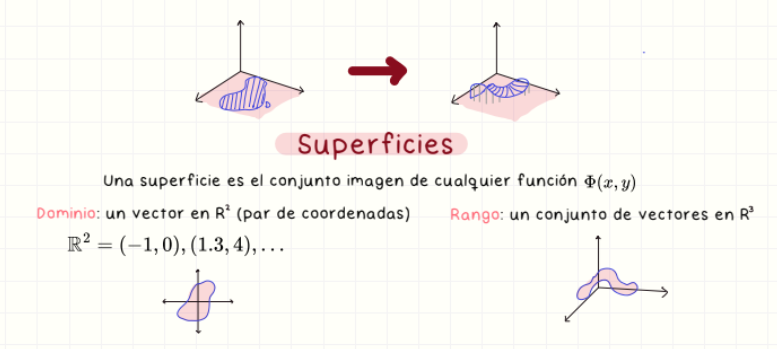
Superficies
Una superficie es el conjunto imagen de una función vectorial de dos variables Φ(u,v). Está definida sobre un dominio en ℝ² y toma valores en ℝ³.
Coordenadas cilíndricas
Extienden las polares añadiendo una coordenada z.
Φ(θ,z) = (a + r cos(θ), b + r sin(θ), z).
D: [0, 2π] × ℝ.
![<p>Extienden las polares añadiendo una coordenada z. <br />
Φ(θ,z) = (a + r cos(θ), b + r sin(θ), z). <br />
D: [0, 2π] × ℝ.</p>](https://knowt-user-attachments.s3.amazonaws.com/ee35147d-8d08-4eae-8fa6-f564f1116953.png)
Coordenadas esféricas
Representan puntos en términos de su radio y dos ángulos.
Φ(θ, φ) = (a + r cos(θ) sin(φ), b + r sin(θ) sin(φ), c + r cos(φ)).
D: [0, 2π] × [0, π].
![<p>Representan puntos en términos de su radio y dos ángulos. <br>Φ(θ, φ) = (a + r cos(θ) sin(φ), b + r sin(θ) sin(φ), c + r cos(φ)). <br>D: [0, 2π] × [0, π]. </p>](https://knowt-user-attachments.s3.amazonaws.com/cfe391cd-2e7c-4ec1-9167-77b8b2138873.png)
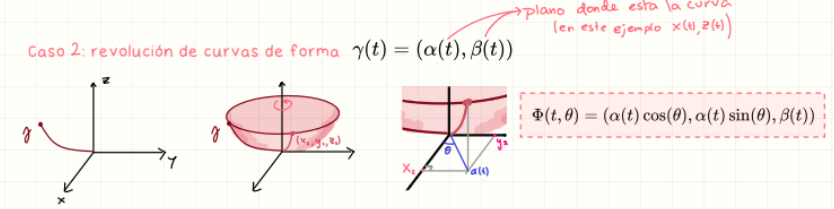
Superficies de revolución forma y = f(x)

Superficies de revolución forma y(t) = (a(t), b(t)
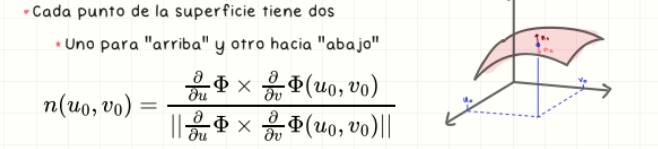
n = ∂Φ/∂u × ∂Φ/∂v.
Vector normal unitario
Se obtiene normalizando el vector normal:
n̂ = (∂Φ/∂u × ∂Φ/∂v) / ||∂Φ/∂u × ∂Φ/∂v||.
Plano tangente a superfice
En un punto Φ(u₀, v₀), el plano tangente tiene ecuación:
n · (X − X₀) = 0, donde n es el vector normal en ese punto.

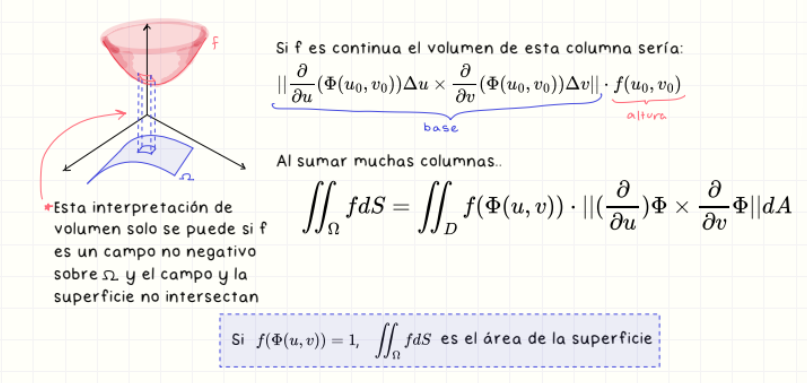
Área de una superficie
Se calcula mediante la norma del producto cruz entre los vectores tangentes a las curvas coordenadas:
Área = ∬ ||∂Φ/∂u × ∂Φ/∂v|| dA.

Integral de superficie de campo escalar
Representa el “volumen” bajo la superficie si f ≥ 0. Se define como:
∬ f dS = ∬ f(Φ(u,v)) ||∂Φ/∂u × ∂Φ/∂v|| du dv.
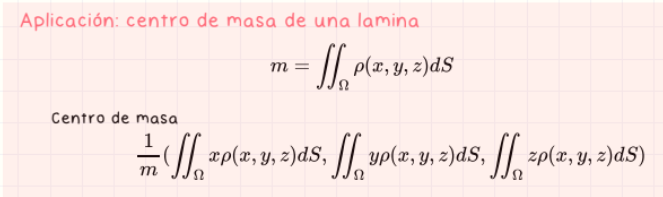
Centro de masa de una lámina
Si ρ(x,y,z) es la densidad superficial, el centro de masa se calcula como:
(x̄, ȳ, z̄) = (1/m) ∬ xρ dS, ∬ yρ dS, ∬ zρ dS.
Superficie orientable
Una superficie es orientable si se puede asignar un campo normal continuo. No todas las superficies lo permiten (ej: banda de Möbius).
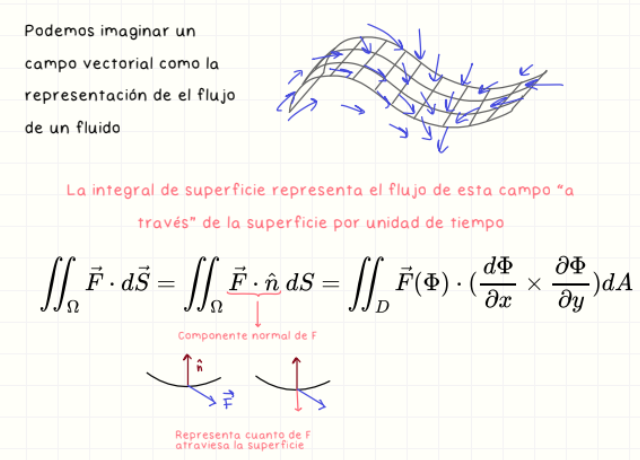
Integral de superficie de campo vectorial
Representa el flujo del campo a través de una superficie. Se expresa como:
∬ F · dS = ∬ F(Φ(u,v)) · (∂Φ/∂u × ∂Φ/∂v) du dv.
Mide cuánto atraviesa el campo la superficie por unidad de tiempo.
Independencia de la parametrización en Integral de superficie de campo vectorial
La integral de superficie no depende de cómo esté parametrizada, siempre que se conserve la orientación. Si se invierte la orientación, la integral cambia de signo.
Q = ε₀ ∬ E · dS
Es uno de los pilares del electromagnetismo.
Teorema de Stokes
Relaciona la circulación de un campo sobre una curva cerrada con el flujo de su rotacional a través de una superficie que tiene esa curva como borde:
∮ F · dr = ∬ rot(F) · dS.
La orientación del borde y de la superficie debe seguir la regla de la mano derecha.

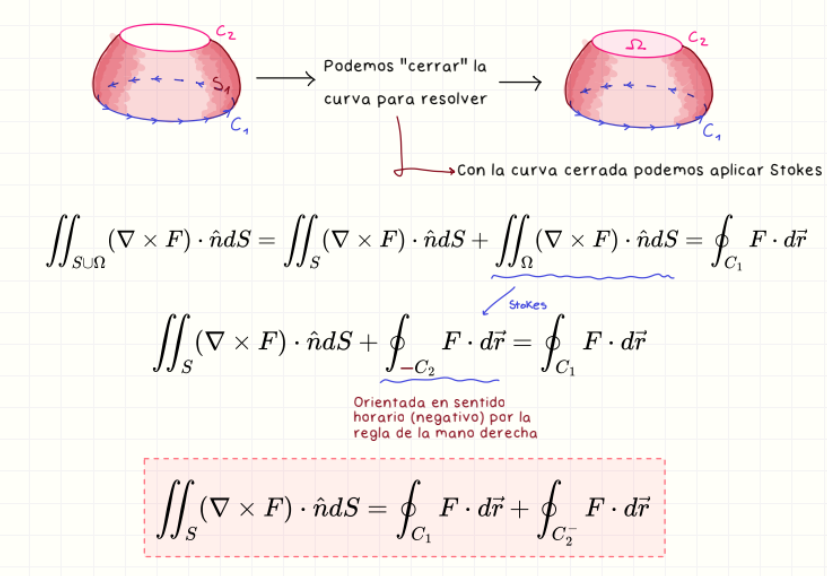
Stokes con dos curvas de borde
Si una superficie tiene dos curvas de borde, se puede cerrar una de ellas artificialmente y aplicar Stokes considerando las orientaciones. El resultado es la suma de ambas integrales de línea.
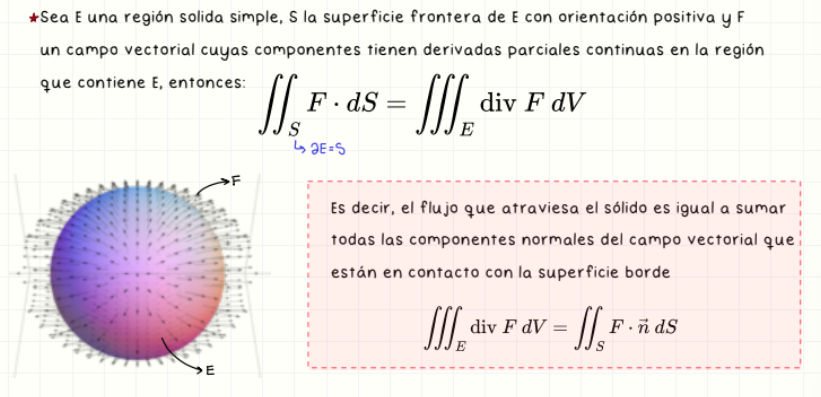
Teorema de la divergencia (Gauss)
Relaciona el flujo de un campo vectorial F a través de la superficie frontera de una región sólida E.
Mide el “flujo neto” que entra o sale del volumen.
Volumen de una región E en ℝ³
∭ div F dV representa el volumen si div F = 1