3 Meccanica razionale Capitolo3: cinematica dei sistemi e delle masse
1/42
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced |
|---|
No study sessions yet.
43 Terms
definizione di sistema libero
un sistema in cui bisogna conoscere tutte le coordinate dei punti per conoscere la configuarione del sistema
definizione di vincolo
un vincolo è una funzioen che correla e limita le posizione e/o gli spostamenti di un sistema meccanico
come vengono classificati i vincoli
vincoli olonomi e anolonomi
vincoli interni e esterni
vincoli unilaterali e bilaterali
vincoli reonomi e scleronomi
vincoli lisci e scabri
che cosa è un sistema olonomo
un sistema solamente soggetto a vincoli olonomi
definire i vincoli esterni ed interni
che cosa differenziano
fare esempi
la introduzinoi di questo tipo di vincolo è stata fatta perchè si distingue fra vincoli interni o allinterno dello stesso sistema come i vincoli di rigidità e vincoli esterni che sorgono quando si interfaccia il sistema con l’ambiente
ES: vincoli interni: condizione di rigidità
vincoli esterni: condizioni tra sistemi come rotolamento
che cosa sono i vincoli olonomi e anolonomi, perche sono stati introdotti e come si fa la distinzione
la classificazione piu importante dei vincoli
vincolo OLONOMO
un vincolo tra le coordinate dei punti di un sistema, formato da equazioni e disequazioni in termini finiti,
in altre parole:
vincolo delle posizioni del sistema e degli spostamenti del sistema
ES: appartenenza di un punto ad un piano,
con le disequazioni anche: es appartenenza di un punto 1 quadrante del sistema di riferimentovincoli ANOLONOMI
un vincolo che si presenta come forma differenziale non esatta, percio non integrabile
il vincolo esprime vincoli per gli spostamenti del sistema ma non per le posizioni, dato che non si puo integrare
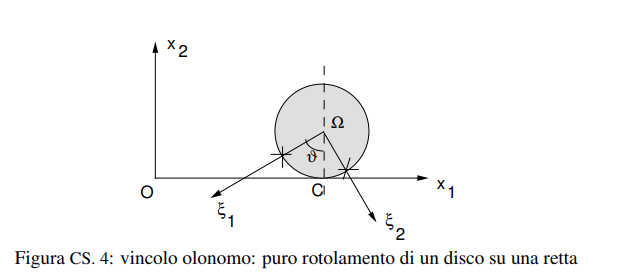
ES: condizione di puro rotolamento: dS(a) = dS(r)cè anche un caso particolare un vincolo pseudo anolonomi
vicolo che sono differenziabili e riconducibili a vincoli olonomi per integrazione,
es: disco che rotola senza strisciare su una retta
qui la condizione di rotolamento puro è dS = dx, con dS = R*dϑ
qui si puo integrare e si ottiene la forma R ϑ = x − x0
spiegare i vincoli unilaterali - bilaterali, che cosa descrivono?
unilaterali, vincoli che contengono almeno una disuguaglianza
bilaterali, vincoli che contengono solo uguaglianze
ES. vincolo unilaterale: un punto che è vincolato a muoversi lungo il semiasse positivo delle x:
che cosa sono le posizioni di confine
sono le posizioni limite
spiegare i vincoli scleronomi e reonomi, fare esempio
la differenza è la dipendenza dal tempo:
vincoli scleronomi: Un vincolo si dice scleronomo quando nella sua formulazione non compare la dipendenza dal tempo (dipendenza esplicita)
vincolo reonomo: Un vincolo si dice reonomo quando nella sua formulazione compare la dipendenza esplicita dal tempo
ES: un vincolo olonomo reonomo, un punto vincolato ad appartenere ad una superficie variabile nel tempo, es disegno un punto su un pallocino e lo gonfio
come si calcola il numero di gradi di libertà di un sistema olonomo
un sistema costituito da n punti Ps s=1…n e avendo m condizioni di vincoli. allora i gradi di libertà si calcolano come 3n-m o la differenza tra gradi di libertà del sistema libero e condizioni di vincolo
definizione di grado di libertà
definizione di parametri lagrangiani
i gradi di libertà è un numero, che identifica il numero di variabili indipendenti che in un certo istante identifica univocamente la configurazione del sistema
i parametri lagrangiani sono le suddette variabili indipendenti che in un cert istante identificano univocamente la configurazione di un sistema
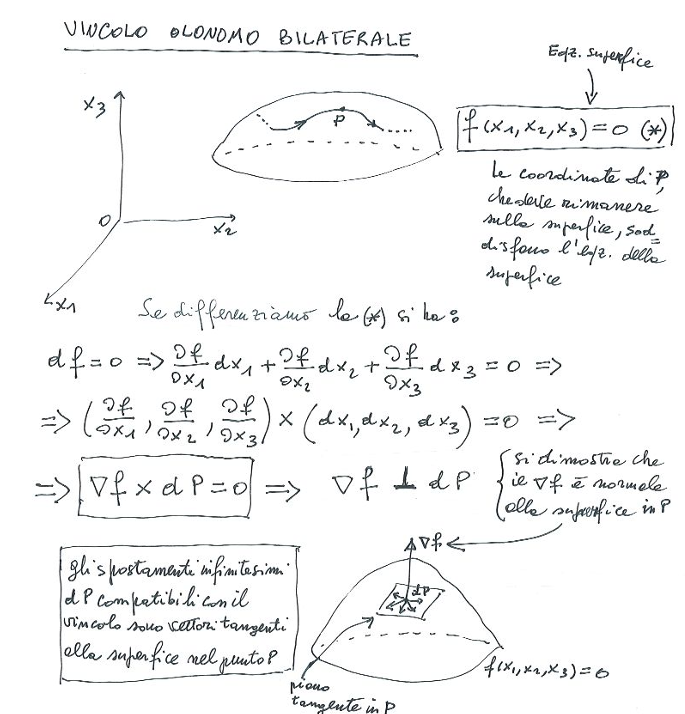
dimostrare che se un punto è vincolato a muoversi su una superficie, allora gli spostamenti validi sono solo quelli tangenti alla superficie stessa
che cosa è lo spazio delle configurazioni
che cosa è lo spazio degli eventi e quale è la differenza
parto da un sistema olonomo con N gradi di libertà, percio la configurazione del sistema puo essere univocamente descritta da N variabili indipendenti.
lo spazio delle configurazioni è uno spazio vettoriale di dimensione N dove la i-esima coordinata di un generico punto è il i-esimo parametro lagrangiano che descrive la configurazione del sistema a N gradi di libertà. percio ogni punto rappresenta una possibile configurazione del sistema
poi c’è lo spazio degli eventi, questo prende in considerazione anche il tempo come coordinata e perciò avrà N+1 dimensioni
q = (t, q1, … , qN)
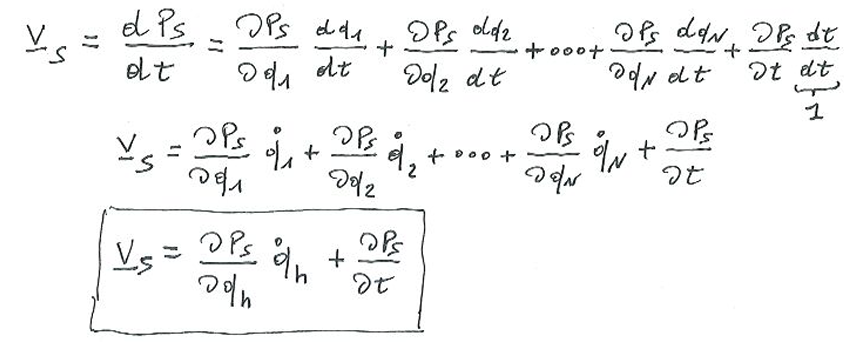
come faccio a calcolare la velocità di un sistema olonomo
i punti di un sistema olonomo sono una funzione dei parametri lagrangiani:
OPs = OPs( q1, q2 , …, qn, t)
se ora derivo OPs rispetto al tempo ho che il s-esimo vettore velocità nel punto OPs sara:
dove la convenzione di Einstein indica una somma per gli indici ripetuti “h“
scrivere la formula di derivazione di funzioni composte in più variabili
elencare tutti i tipi di spostamento e come si rappresentano per un sistema olonomo
NOTA: la formula per differenziare una funzione composta in piu variabili è: sia f(x,y) :R² → R e
siano x(t) e y(t) funzioni a una variabile, chiamo F(t) = f(x(t),y(t)) la funzione composta, allora il differenziale di F(t) è:
dF/dt = ∂f/∂x * dx/dt + ∂f/∂y * dy/dt
spostamento infinitesimo, d*Ps
puramente matematico che ignora la presenza di vincolispostamento infinitesimo possibile δPs
spostamento infinitesimo che però tiene conto dei vincoli e della loro eventuale dipendenza dal tempospostamento infinitesimo virtuale ∂Ps
spostamento infinitesimo che tiene conto dei vincoli ma NON della loro eventuale dipendenza dal tempo
lo spostamento avviene in un istantespostamento elementare o reale dPs
un spostamento che avviene nell’intervallo [t, t + dt] che rispetta le leggi del moto, lo spostamento a livello fisico avviene
![<p>NOTA: la formula per differenziare una funzione composta in piu variabili è: sia f(x,y) :R² → R e <br>siano x(t) e y(t) funzioni a una variabile, chiamo F(t) = f(x(t),y(t)) la funzione composta, allora il differenziale di F(t) è: <br><br>dF/dt = ∂f/∂x * dx/dt + ∂f/∂y * dy/dt</p><ol><li><p>spostamento infinitesimo, d*Ps<br>puramente matematico che ignora la presenza di vincoli</p></li><li><p>spostamento infinitesimo possibile δPs<br>spostamento infinitesimo che però tiene conto dei vincoli e della loro eventuale dipendenza dal tempo</p></li><li><p>spostamento infinitesimo virtuale ∂Ps<br>spostamento infinitesimo che tiene conto dei vincoli ma NON della loro eventuale dipendenza dal tempo<br>lo spostamento avviene in un istante</p></li><li><p>spostamento elementare o reale dPs<br>un spostamento che avviene nell’intervallo [t, t + dt] che rispetta le leggi del moto, lo spostamento a livello fisico avviene</p></li></ol>](https://knowt-user-attachments.s3.amazonaws.com/91c4f3a6-da00-4b5a-b173-2cf006af82f0.jpg)
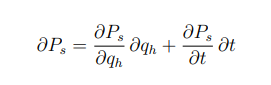
descrivere lo spostamento infinitesimo possibile
uno spostamento possibile è uno spostamento che tiene tiene conto dei vincoli e della loro eventuale dipendenza dal tempo
si scrive come:
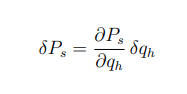
descrivere lo spostamento infinitesimo virtuale
uno spostamento infinitesimo che tiene conto dei vincoli ma non della loro dipendenza dal tempo,
il tempo viene pensato come fissato e rimane costante, si puo anche pensare che lo spostamento avviene in un istante a velocità infinita
si scrive come:
descrivere lo spostameno infinitesimo
uno spostamento che completamente ingora la presenza di vincoli
descrivere lo spostamento infinitesimo reale
uno spostamento che subisce il punto Ps nellintervallo [t,t+dt] rispettando i vincoli ed in corrispondenza ad un determinato moto.
uno spostamento che deve obbidire alle leggi del moto
![<p>uno spostamento che subisce il punto Ps nellintervallo [t,t+dt] rispettando i vincoli ed in corrispondenza ad un determinato moto. <br>uno spostamento che deve obbidire alle leggi del moto<br></p>](https://knowt-user-attachments.s3.amazonaws.com/ac543412-4de8-4072-b942-692d79a233c2.png)
quale tipo di vincoli deve avere un sistema perche gli spostamenti elementari possibili e virtuali coincidano?
serve un sistema a vincoli scleronomi
uno spostamento elementare è anche sermpre uno spostamento infinitesimo possibile,
vale il viceversa
la prima affermazione è vera, ogni spostamento elementare è anche uno spostamento possibile, ma non è detto che uno spostamento possibilie sia anche elementared
definire gli spostamenti reversibili e irreversibili
uno spostamento si dice reversibile se lo spostamento opposto a partire dalla stessa configurazione è anche elementare. senno —> irreversibile
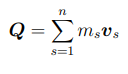
come calcolare la quantità di moto per un punto materiale e per un sistema di punti materiali
per un punto materiale P con massa mP la quantità di moto è pari a
Q = m*v
come calcolare il momento della quantità di moto di un punto materiale P di massa m rispetto ad un polo di riduzione Ω, e per un sistema di punti materiali
K = ΩP ∧ m*v
formula per la energia cinetica di un punto materiale, e per un sistema di punti materiali
T = ½ m*v²
come si calcola quantità di moto, mometo della quantità di moto e energia cinetica per un sistema continuo
dQ = v*dm = v*ϱ*dC
dK = ΩP ∧ v*dm = ΩP ∧ ϱ*v*dC
dT = ½ v² *dm = ½ v² ϱ dC
integrando si ha:
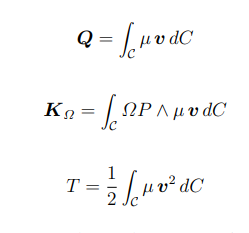
Enunciare il teorema del moto del baricentro. DIMOSTRARE
La quantità di moto di qualunque sistema materiale rispetto ad un osservatore è uguale alla quantità di moto del baricentro pensato come se fosse un punto materiale al quale viene associata la massa dell’intero sistema
Q = mvC
che cosa dice il teorema del moto del baricentro
la quantità di moto di un qualunque sistema per un osservatore esterno equivale alla quantità di moto di un punto materiale posizionato nel baricentro del sistema e con massa uguale alla massa del sistema
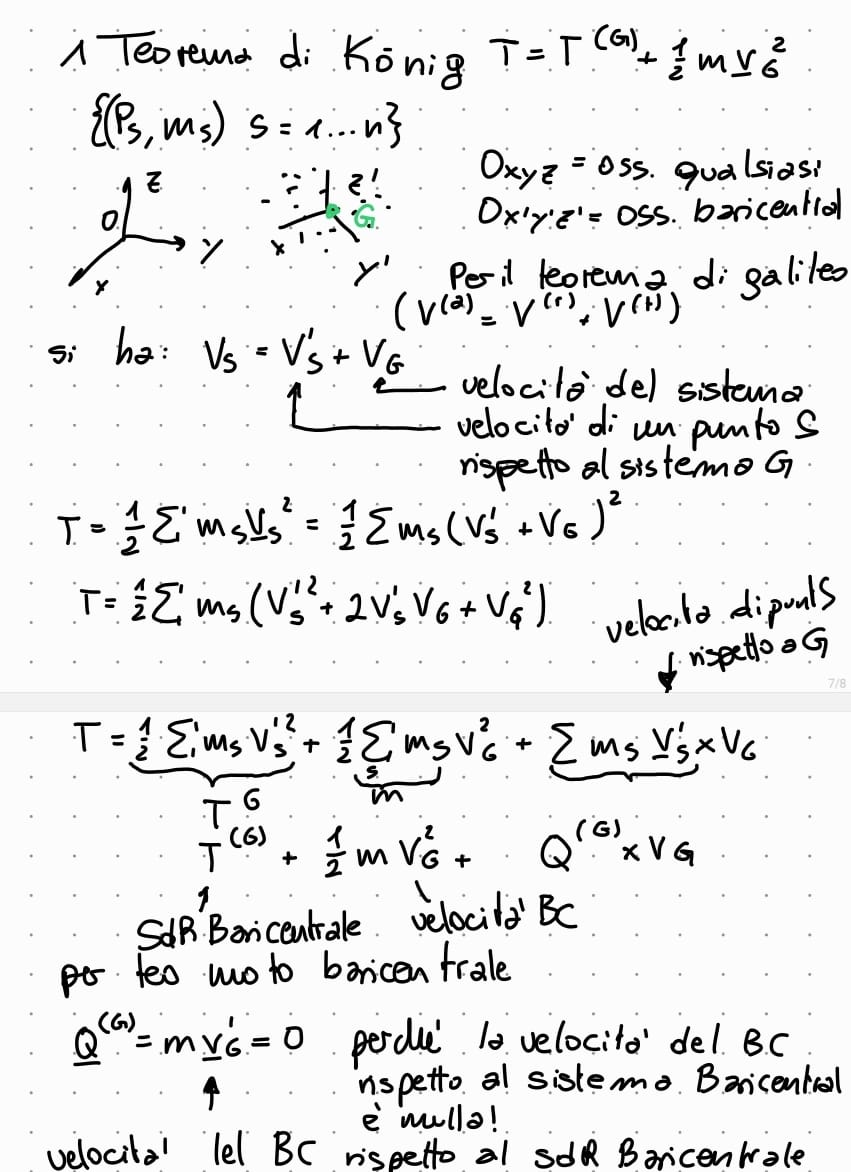
enunciare il primo e il secondo teorema di König
Teorema di König: la energia cinetica di un sistema materiale rispetto ad un osservatore qualunque è uguale alla energia cinetica dello stesso sistema calcolata rispetto al sistema baricentrale
sommata
con la energia cinetica del moto del baricentro pensato come se fosse un punto materiale di massa del sistema
T = T(G) + ½ m*v²GfTeorema di König: (molto simile al primo solo che al posto della energia cinetica c’è il momento della quantità di moto)
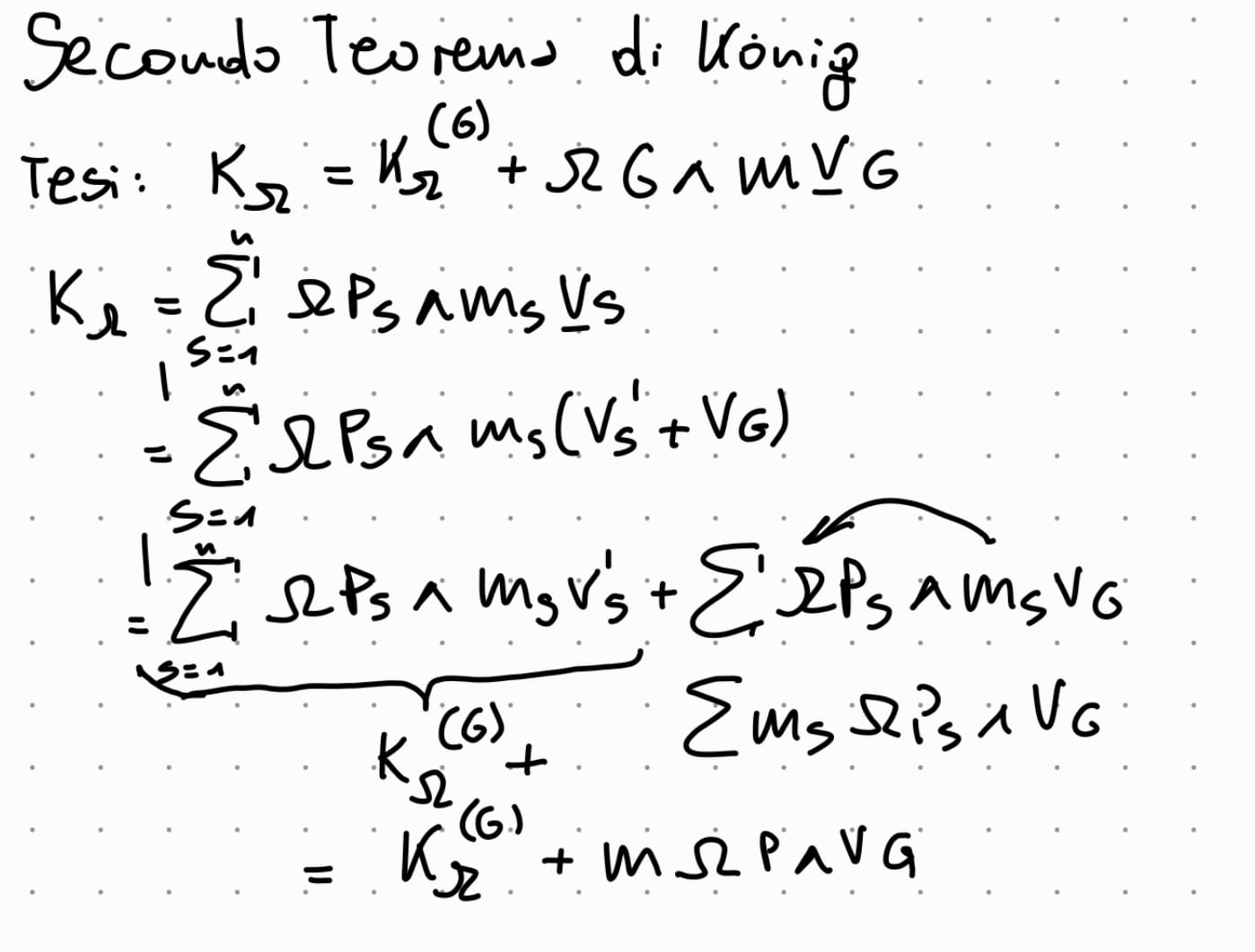
il momento della quantità di moto di un sistema materiale rispetto ad un osservatore qualunque è uguale al momento della quantità di moto dello stesso sistema calcolata rispetto al sistema baricentrale
sommato
con il momento della quantità di moto del baricentro pensato come se fosse un punto materiale di massa del sistema
come è fatto un sistema di riferimento del baricentro
ha due proprietà
la origine coincide con il baricentro
gli assi del sistema baricentrale sono paralleli agli assi del sistema globale
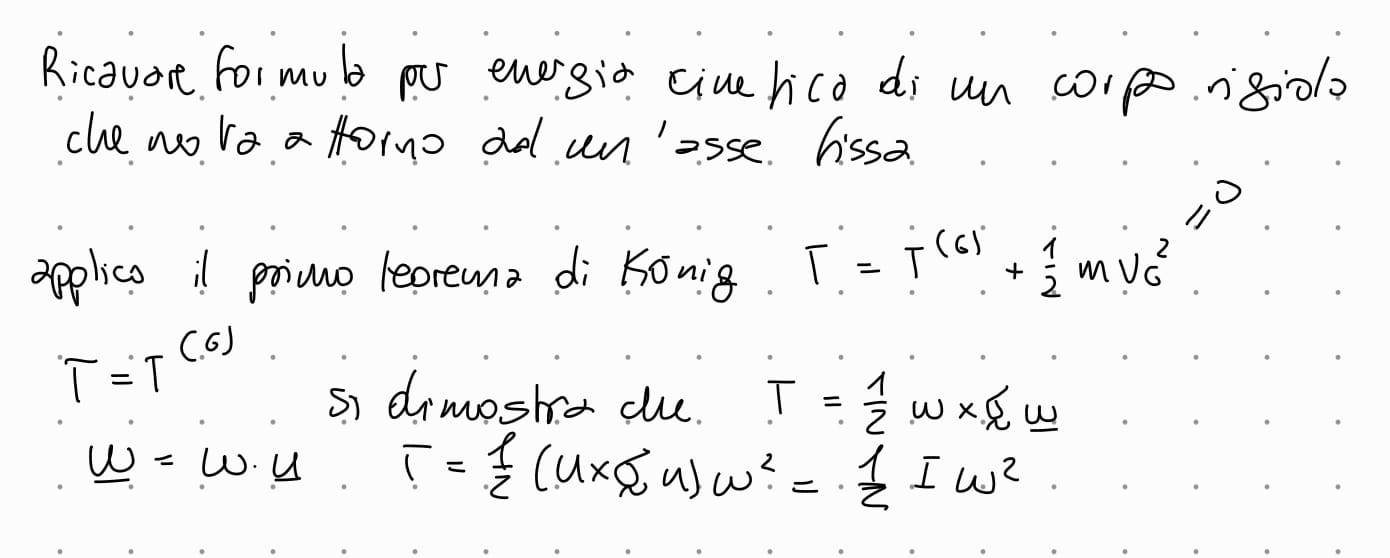
come si calcola la energia cinetica di un corpo rigido con un punto fisso?
formula per calcolare la energia cinetica di un corpo rigido con asse fissa e solidale con il corpo
(NOTA per i calcoli, se serve bisogna calcolare il momento di inerzia rispetto alla asse di istantanea rotazione)
dove J è il momento di inerzia lungo l’asse fisso
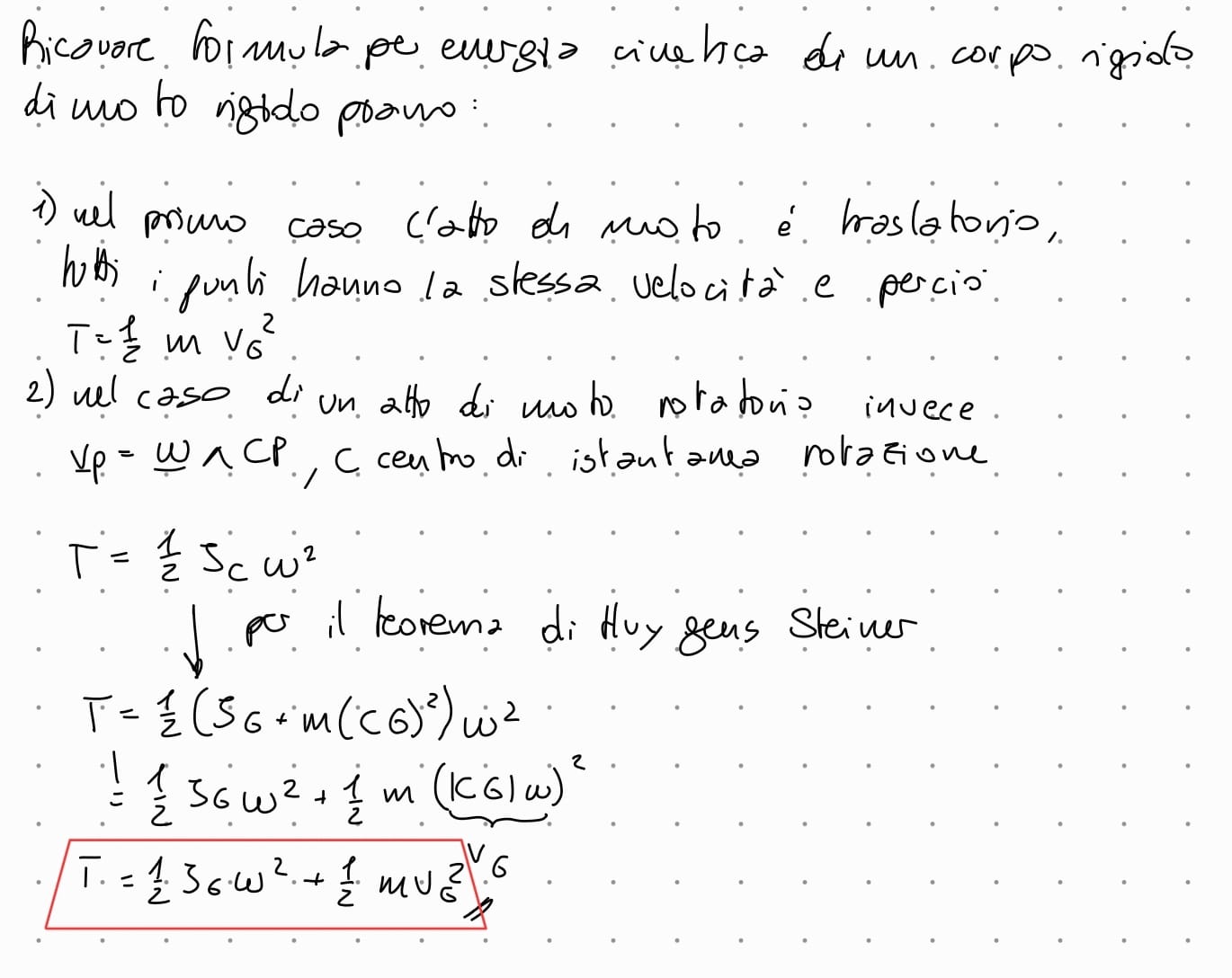
calcolare e derivare la energia cinetica di un corpo ridigo di moto rigido piano,
derivare la formula per il secondo caso
si hanno due possibilità
atto di moto traslatorio:
dato che per definizione ogni punto ha la stessa velocità si avrà che:
T = ½ m*v²atto di moto rotatorio
in questo caso esiste un asse di istantanea rotazioni ed è ortogonale al piano invariante e percio la energia cinetica del sistema si calcola come per un corpo rigido con una asse solidale
come si calcola la energia cinetica per un sistema continuo
Dimostrare il primo teorema di Konig
Dimostrare il secondo teorema di König
come si calcola la energia cinetica di un sistema olonomo, DERIVAZIONE FORMULA (matrice di inerzia )
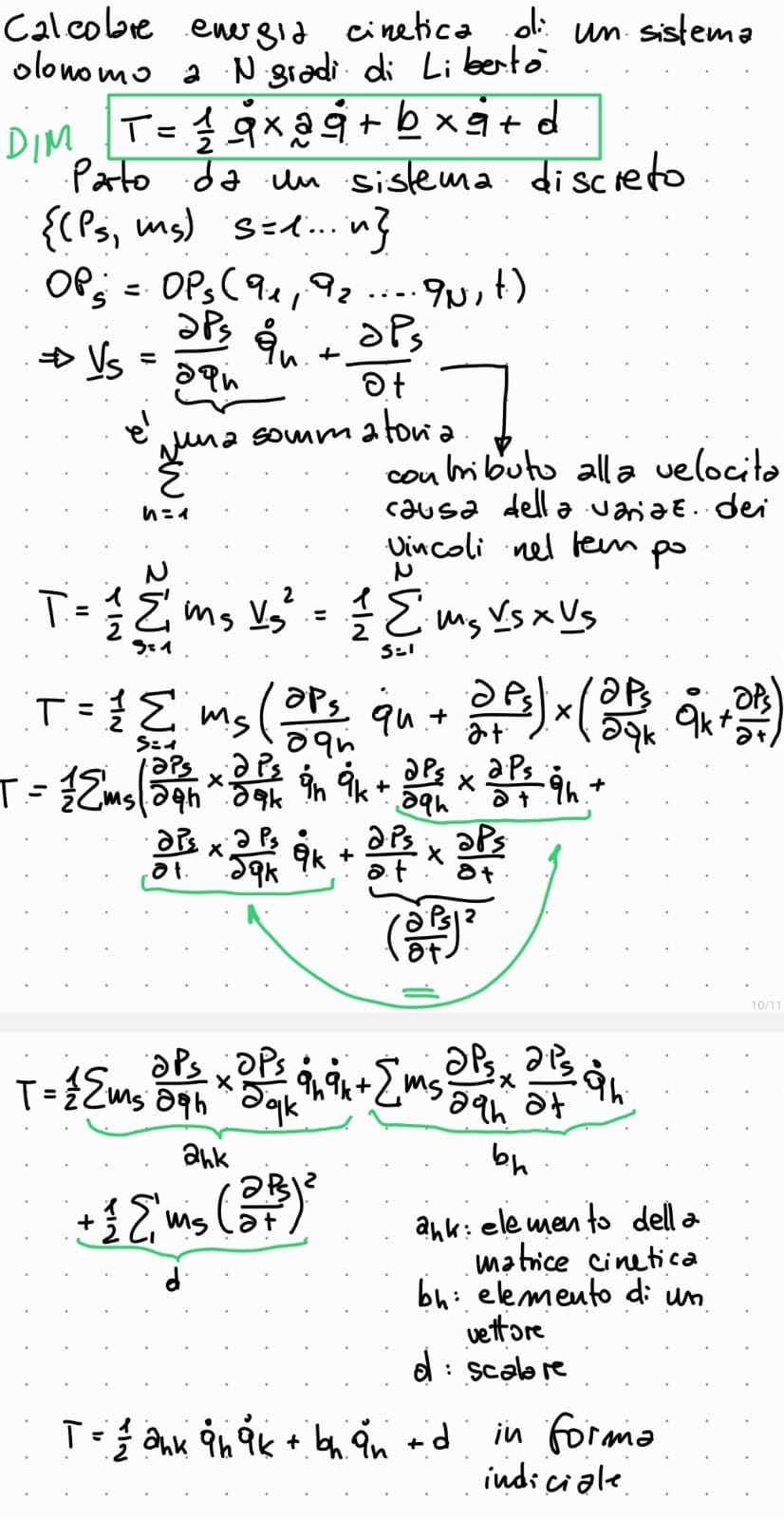
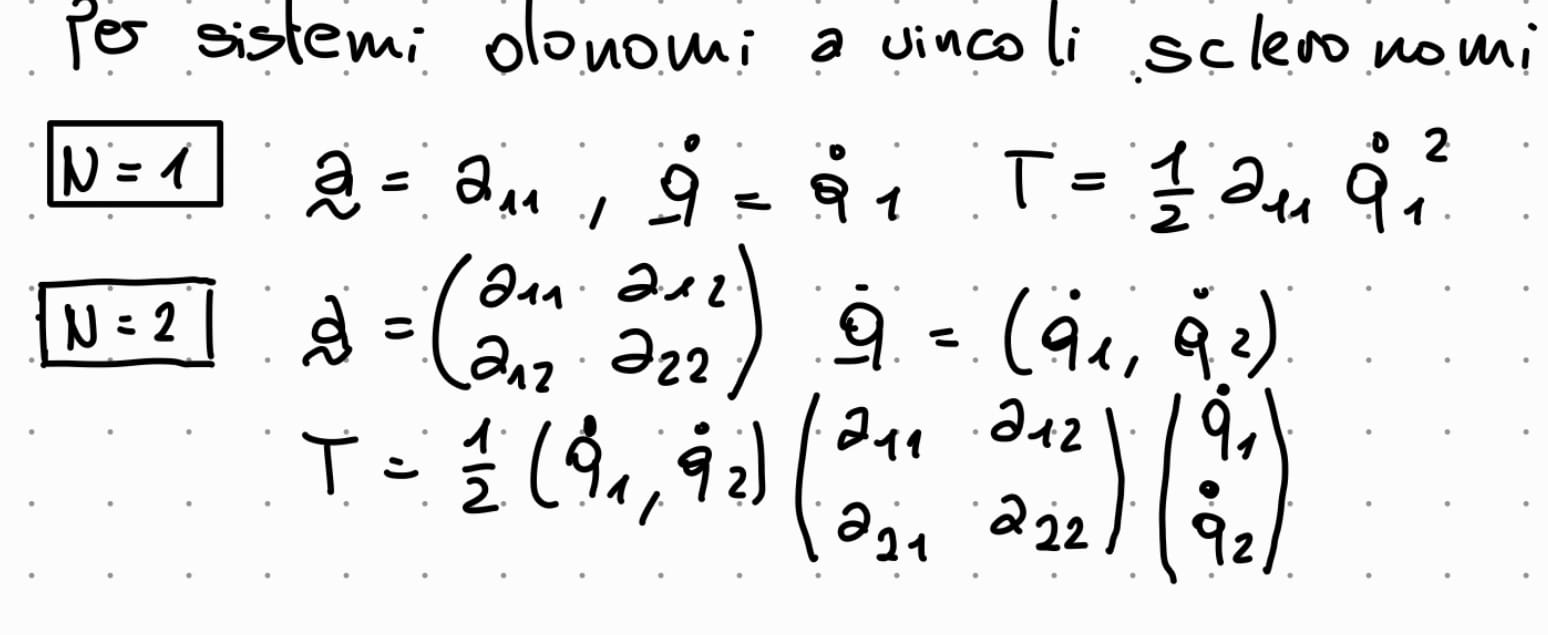
come si calcola la energia cinetica di un sistema olonomo con i vincoli schleronomi (indipendenti dal tempo)

quali sono le proprietà della matrice dell’energia cinetica
simmertica
definita positiva
calcolare la matrice della energia cinetica per un sistema schleronomo a
1 grado di libertà
2 gradi di libertà
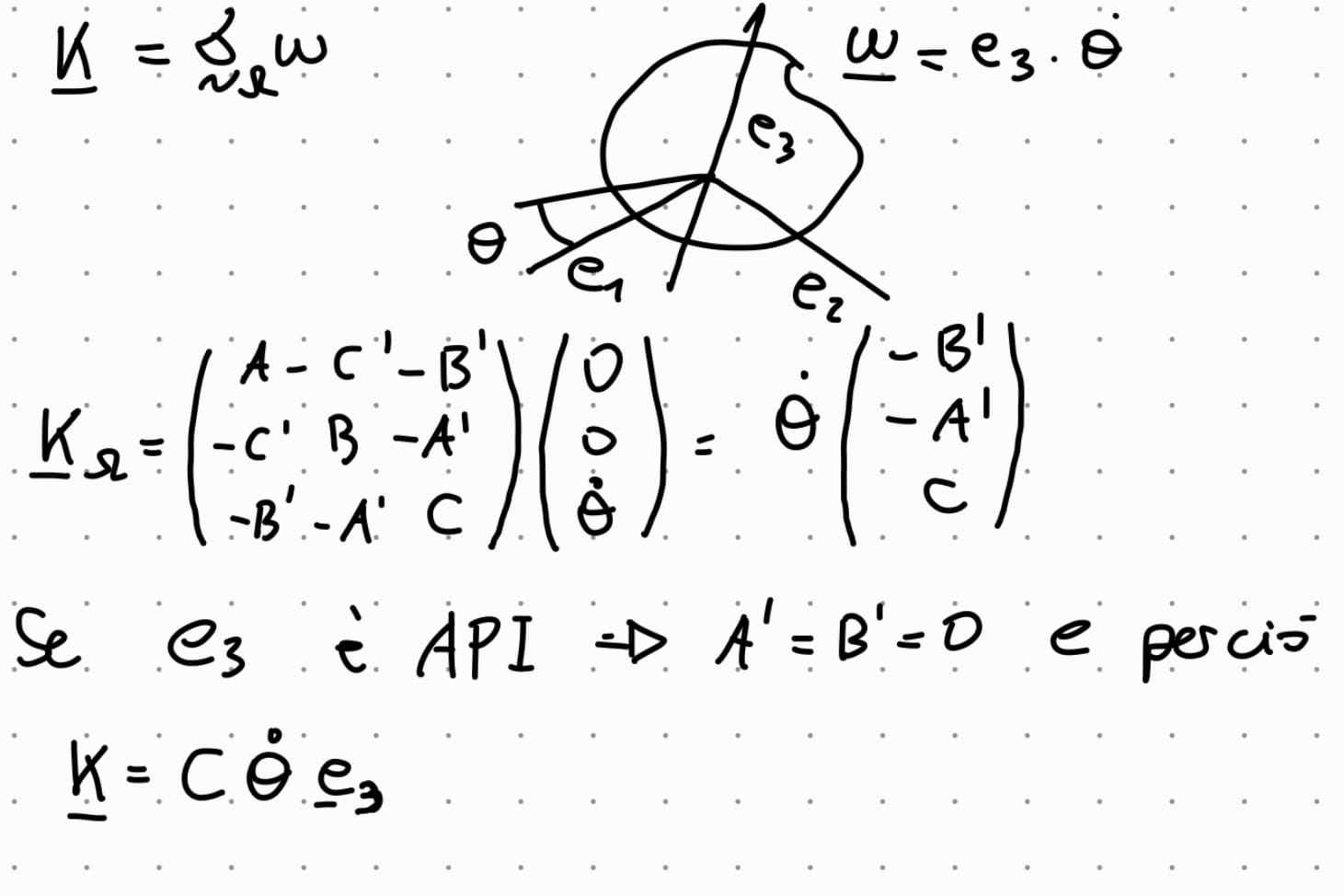
come si calcola il momento della quantità di moto di un corpo rigido che ruota attorno ad un asse,
come cambia la formula se lasse è asse principale di inerzia
come ricavare la formula per la energia cinetica di un corpo rigido che gira attorno ad un asse