Princeton Review AP Calculus BC, Chapter 11: Parametric Equations, Polar Coordinates, and Vector-Valued Functions
Parametric Equations
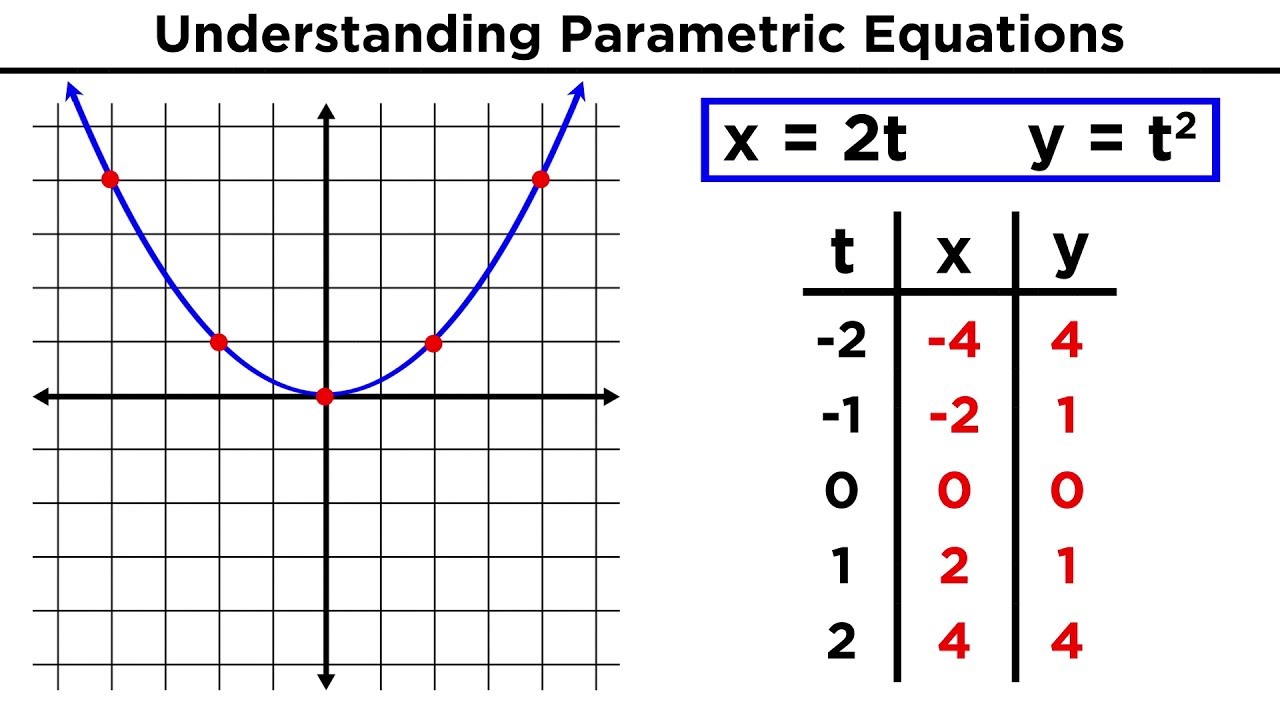
- Parametric functions show a relationship between a variable and time
- Often it’s used to show the position of an object or shape of a curve
- The formula for a parametric equation is given by:
- x = f(t)
- y = g(t)
- X & Y are dependent and time is independent
Arc Length of Curves
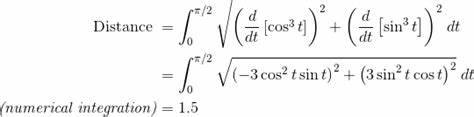
- Arc length is the distance along a curve
- We have to square the derivative, but because both X & Y are dependent, we square both derivatives
- We then take the square root and the integral
- This time it’s the integral from t=a to t=b \n

Vector-Valued Functions
- These functions map numbers to vectors!
- For parametric equations, they represent position, velocity, and acceleration!
- To derive these functions we have to take the derivative of each component individually
- The same applies to integration- integrate each component individually
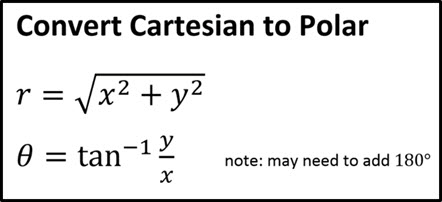
Polar Coordinates
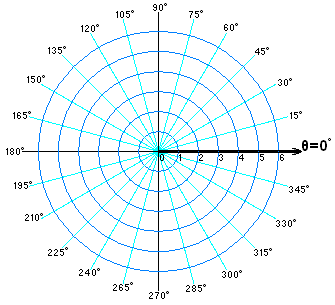
- This is a coordinate system where x,y pairs are replaced with r (the distance from the orgin) and θ (angle from x-axis)
- To go from a set of polar coordinates to regular (cartesian) there is a conversion:
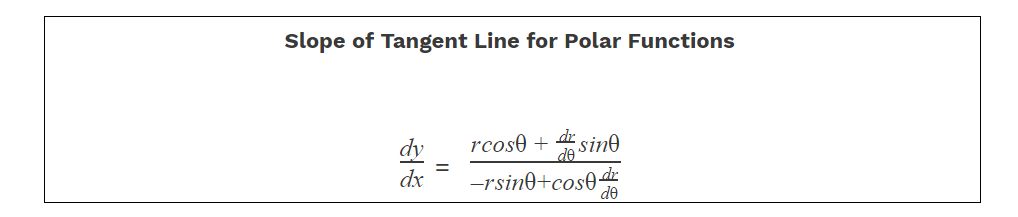
- Remember that when we differentiate with polar coordinates we differentiate with respect to theta → dθ
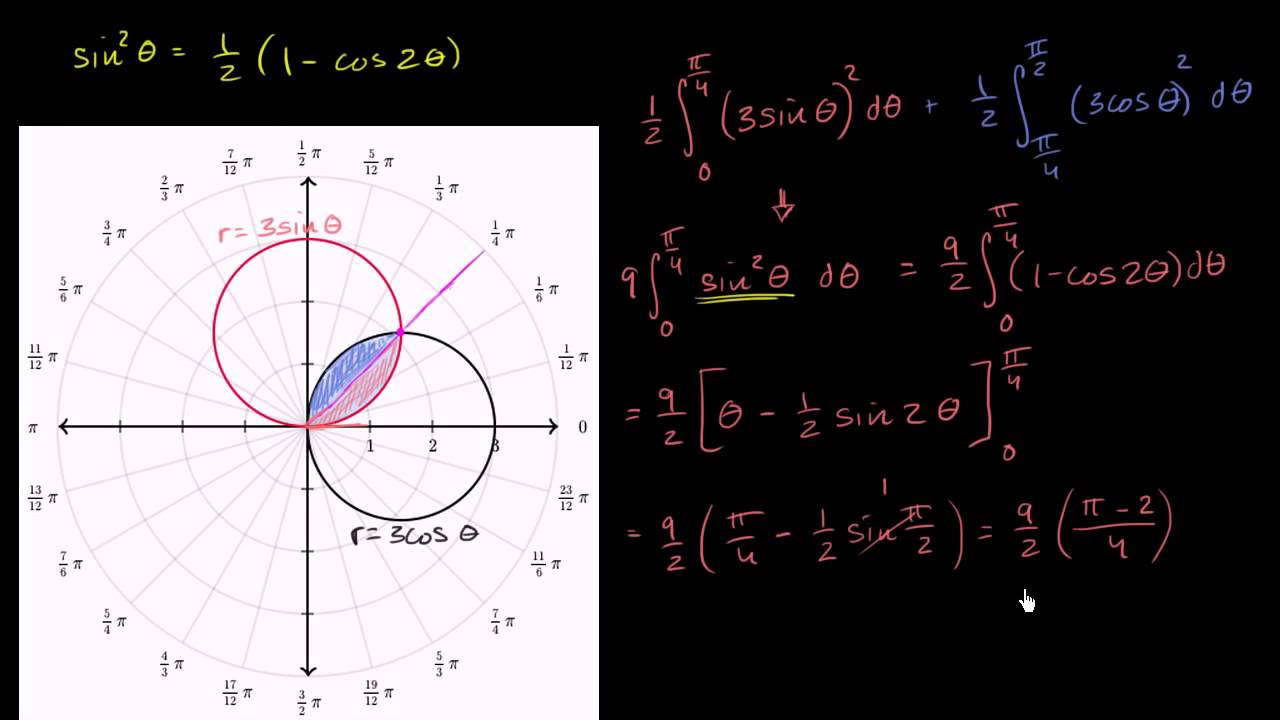
- Area between two curves in polar coordinates is given by A = (1/2) ∫(a,b) (R^2 - r^2) dθ
- Instead of top - bottom we have inner - outer
 \n
\n