OOW Nav & Radar
1/150
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
151 Terms
Variation
The Angular difference between true meridian and magnetic meridian
Deviation
The magnetic field of the vessels structure and contents will cause an additional compass error known as deviation
Characteristics of Permanent magnetism (4)
Hard Iron
Heating and banging it in a magnetic field
High retentuity
Remains magnetised
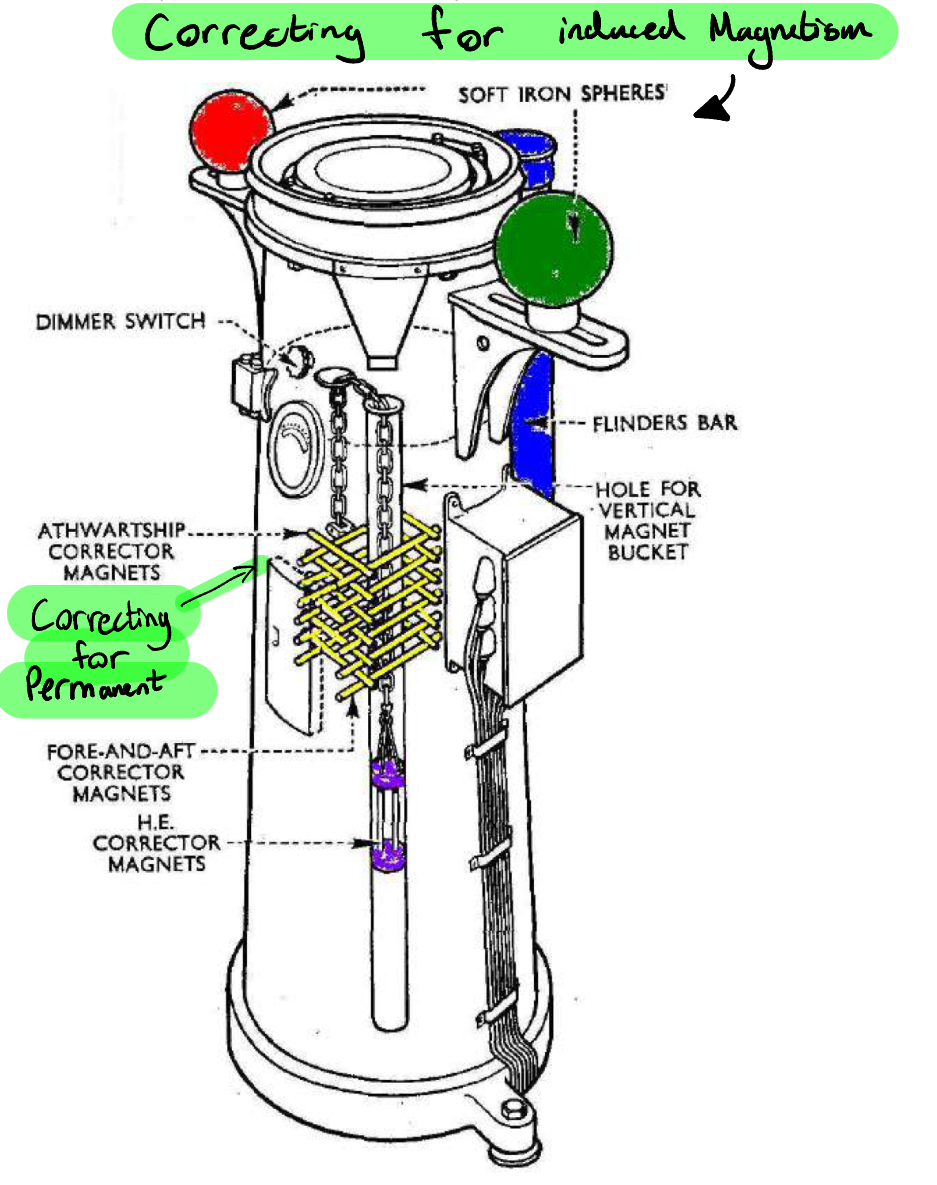
How to correct for permanent magnetism
Placing permanent magnets around the compass position, aligned fore and aft, athwartships and vertically
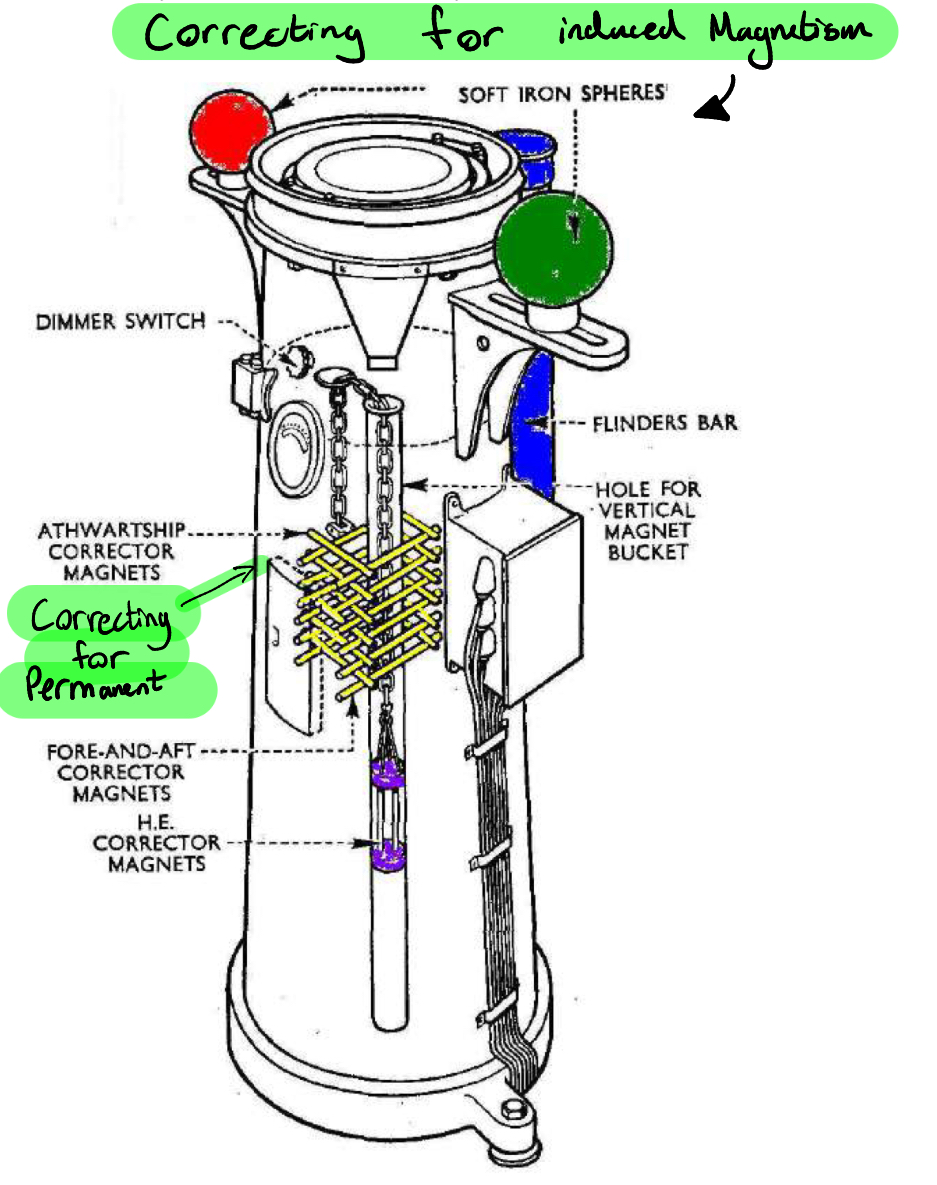
Characteristics of Induced magnetism (3)
soft iron
Low retentuity
Loses magnetism over time
How does iron become induced with magnetism ?
Constant rubbing inside a magnetic field
Water moving along the hull in the earths magnetic field.
How to remove induced magnetism ?
placing soft iron correctors around the compass position. Called kelvins balls
And a flinders bar (Vertical soft iron rod)
When should you complete a Compass Error check ?
Once a watch
Sunrise and Sunset
Whenever the opportunity presents
When should you complete a compass swing?
When the vessel has experienced a structural change
When there’s been a large addition of metal or electrical equipment
What to consider when siting a compass(placing) (4)
easily visible from the helm
On the centreline
Clear of magnetic influences
Clear of electrical wiring
Gyro compass
A free gyroscope is a heavy rotor spinning at a high speed and suspended on three axes, it can be turned in any direction but will continue pointing in the same absolute direction in space (True North) as a result of rigidity in space
Gyro error never more than ….
4 degrees, high or low
How many types of compass are there?
(4)
Gyro (true)
Magnetic
Flux gate
GPS
Gyro compass advantages(5) + disadvantage (2)
Advantage
Can be placed anywhere there is space
Repeaters are easily connected
Can interface with a wide variety of equipment
More accurate that it’s magnetic counterpart
Steady reading in far less movement in a Seaway
Disadvantage
reliant on power
Requires several hours to start up/settle
Mercator projection features
All rhumb lines appear straight
Lines of long are equally spaced and parallel
Line of lat are equal in length and parallel
Lines of lat become further apart further north and south
Mercator projection defects
every latitude has different scales of distance
Great circles appear as curves
Areas are distorted
Impossible to chart polar regions
Types of projection (2)
Mercator projection
Gnomonic projection
Why do tides occur?
The moon and the sun exert attractive forces upon the earth causing the water to rise and fall periodically
moon effect 2x than the suns
Spring tides are? And occur?
High High waters
Low Low waters
During new moon and full moon
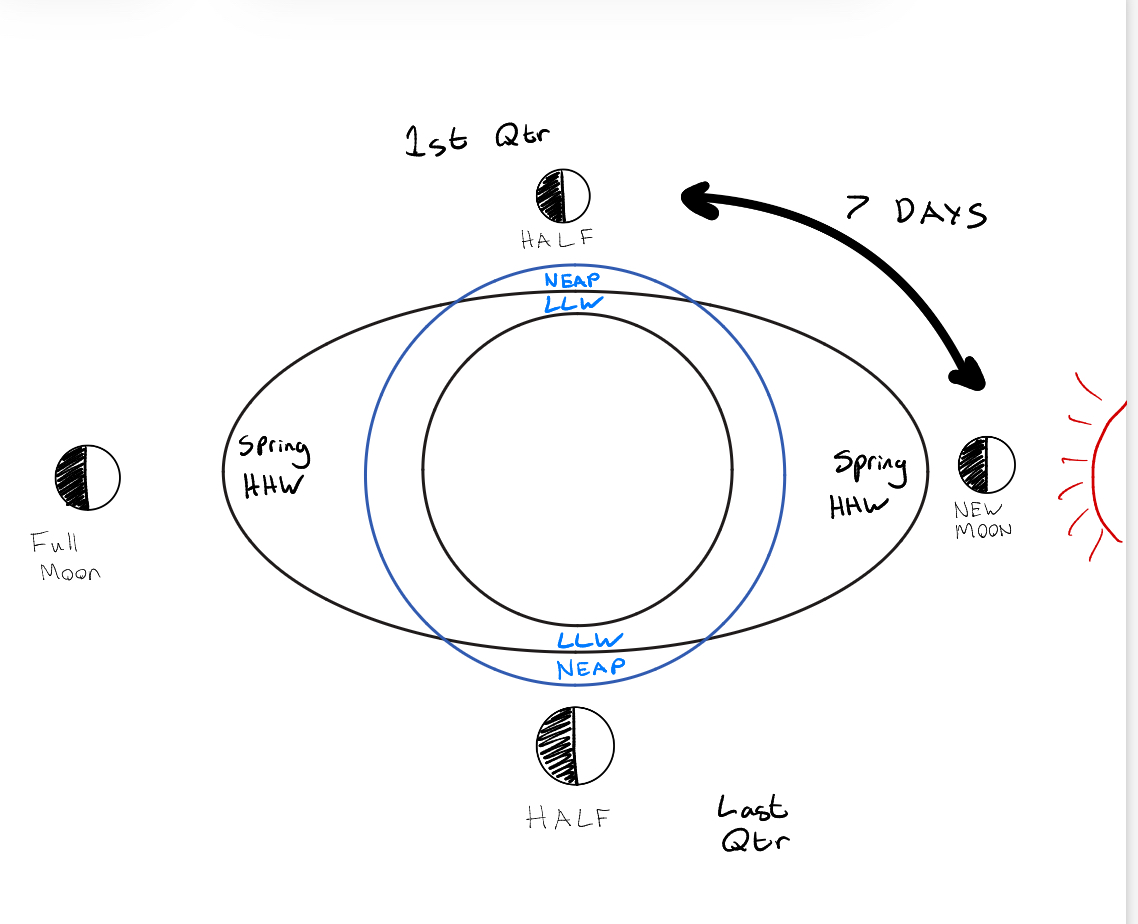
Neap tides are? And occur?
High waters are lower
Low waters are higher
Less of a range
During first and last quarter of the moon phase
Moon cycle (new moon to new moon)
28 days
Springs every 14
Semi Diurnal tides
Two high waters and two low waters in a day
Diurnal tides
One high and one low per day,
Large ocean masses like the pacific respond differently
Mixed tides
Large land masses affect the tides in a great variety due to water being restricted to flow easily
Chart Datum
Chart datum is a reference level on nautical charts that represents zero for both water depths and tide heights, also from which drying heights are measured
Under Keel Clearance
The depth of water between the vessels bottom and the seabed or obstruction.
Height of Tide HOT
Height of water level above chart datum
Drying height
The height of an object, such as a rock, obstruction, shoal, that is above chart datum
HAT
Highest Astronomical tide,
Every 19 years
MHWS
Mean high water springs
Average of the high water springs
On admiralty charts, height of lights, bridges and other land features are measured from here
MHW
Mean High water
MHWN
Mean High water neaps
Sea level
Height of sea
Halfway between MHW and MLW
MLWN
Mean Low Water Neaps
MLLW
Mean lowest low water
US Charts
MLW
Mean Low Water
MLWS
Mean Low water springs
LAT
Lowest Astronomical tide
19 years
Chart Datum
Standard ports
A port with sufficient traffic to warrant the expense and time for specific tide tables
What is a Log?
A log is a device for measuring distance and/or speed
Types of logs available (6)
Towed - Mechanical rotator fin
Impellor - electro-mechanical impeller
Electromagnetic - Electrical
Doppler - Electro acoustical, sound frequency
Pressure - Electro-Hydrostatic, water pressure
Acoustic
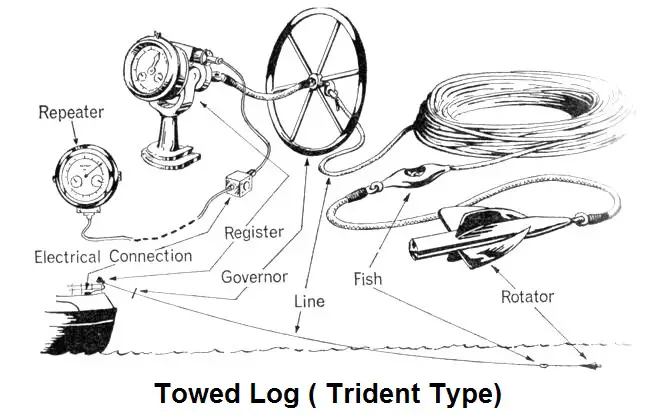
Towed/streamed Log
How does it work?
A rotator is towed by means of a plaited logline, connected to a clock or register mounted on the taffrail.
The fins are designed to spin 900 times per nautical mile, the rotation is passed along the logline through a system of gears to dial s that indicate distance.
STW
Errors
Incorrect Logline length
Damaged fins
Being towed in slipstream
Skipping
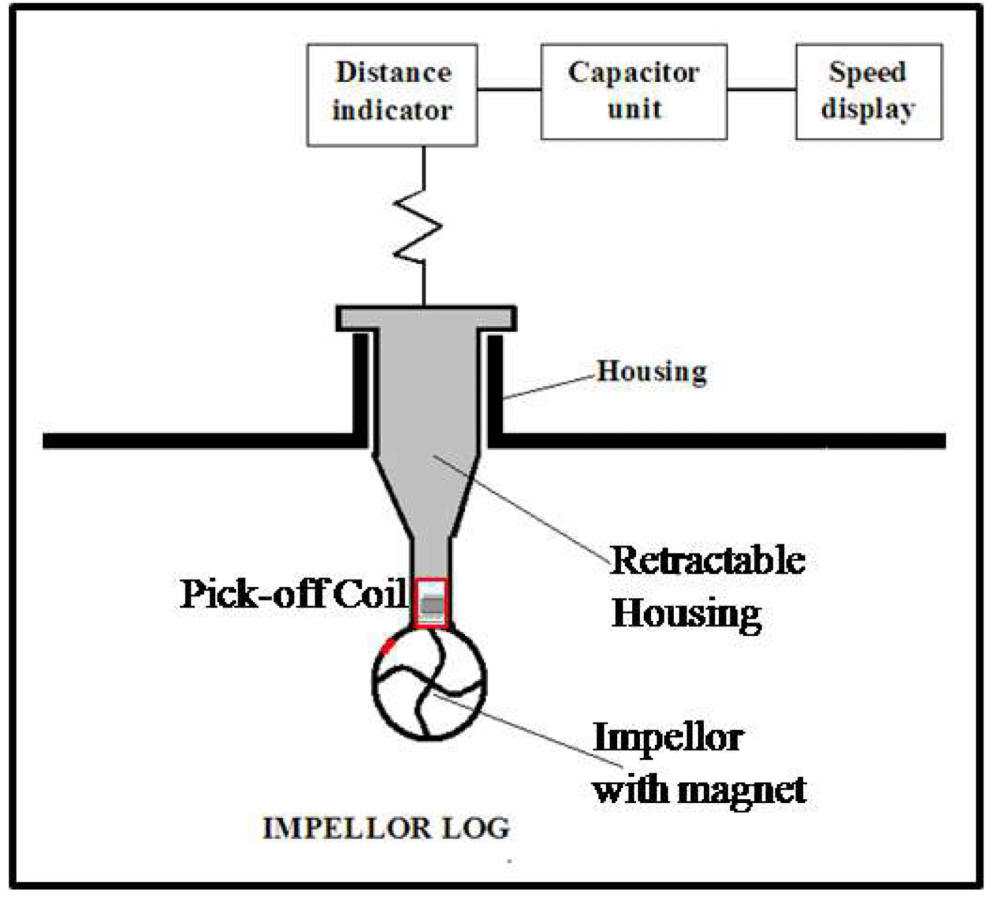
Impellor log
How it works?
Chernikeef
Small Impellor projecting below the hull, a magnet in the Impellor provides a pulse of electrical energy to a coil as it rotates
STW
Speed and distance are measured
Errors
Incorrect calibration
Could get damaged or growth
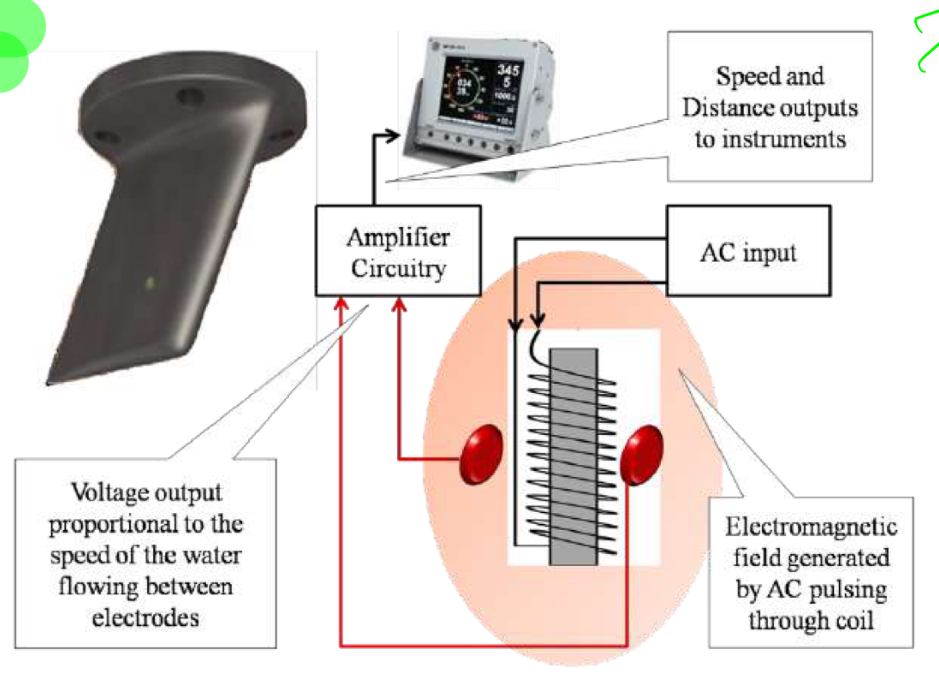
Electromagnetic log
How it works?
Faraday maxwell theory
When a conductor(water) passes through an electromagnetic field, a voltage is created
The amount of voltage created is proportional to the speed of the conductors movement
STW
AC current to the coil
Coil creates an electromagnetic field around sensors
Current set up between the two electrodes
Ship begins to move, speed of water increases, increasing voltage between electrodes
Ship speed can be converted to distance run
Advantages :
Highly accurate
No moving part to get fouled
Measures speed astern
Errors
Variations in Temperature
Be mounted clear of propeller streams or intake/discharges
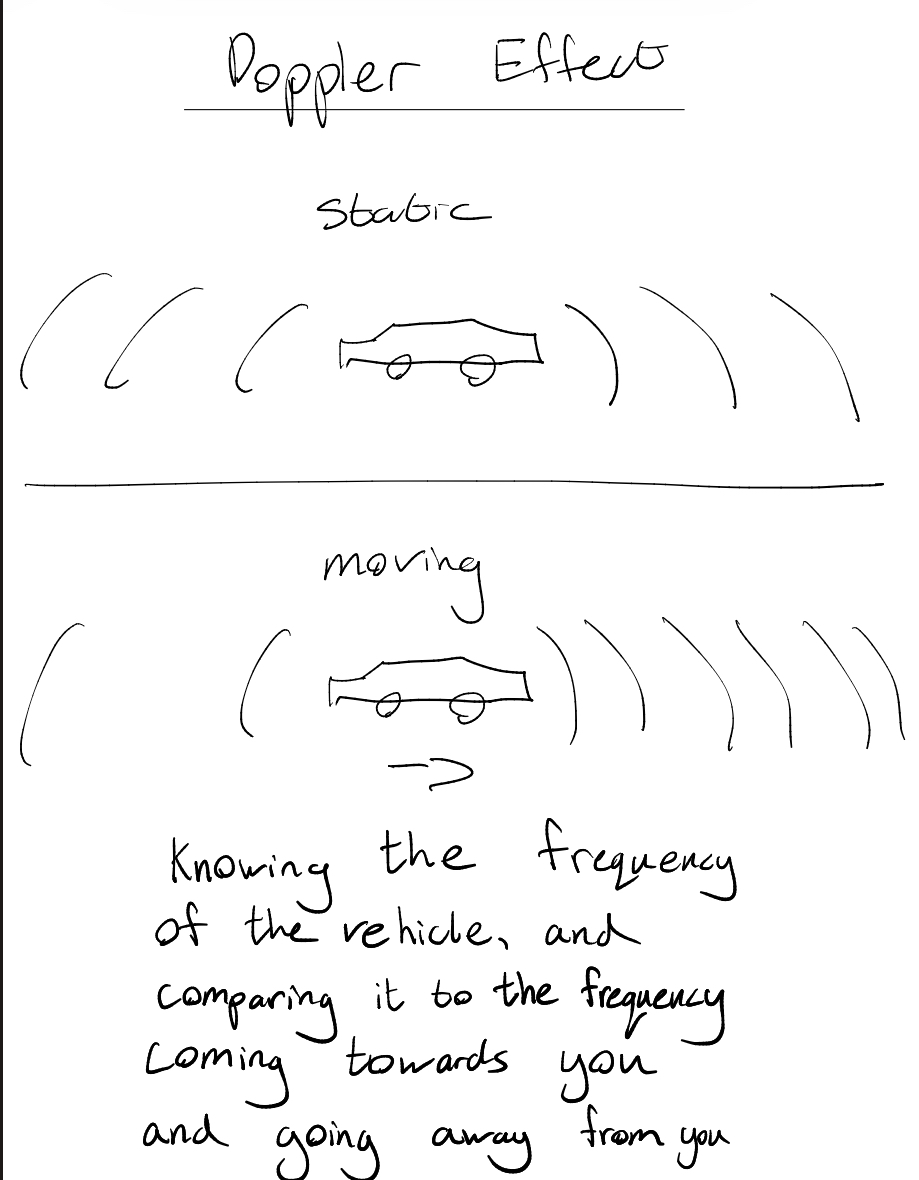
Doppler Speed log
How it works?
the Doppler effect
A shift in frequency between transmitted signal and received signal caused by movement of the sound source
The speed of the source can be determined by measuring the shift in frequency between the transmission frequency and received frequency
SOG / STW
Extremely accurate in ideal circumstances
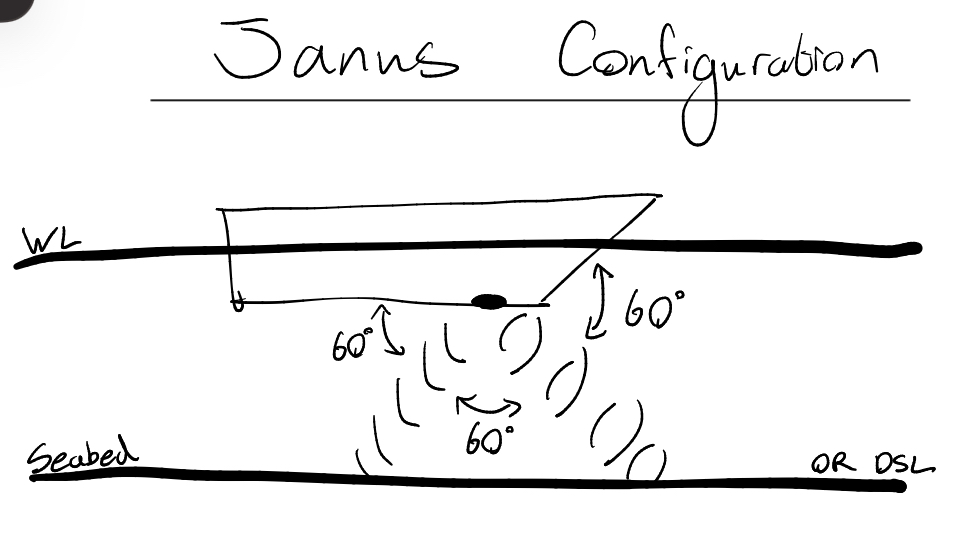
a beam of ultrasound energy is projected forwards from the transducer down at an angle of 60 degrees below horizontal
Energy is reflected back from the seabed or from water layers (DSL)
Second transducers are fitted to overcome vertical motion of the vessel. Same angle aft (60) called the Janus configuration
Combined readings eliminate vertical motion error
SOG to 200m deep
After this depth signals are bouncing of Deep scattering layers(DSL) colder water layers giving STW
Big disadvantage, You do not know when it has switched from SOG to STW
Which speed log gives STW or SOG?
Towed?
Pressure?
Acoustic?
Impellor?
Electromagnetic?
GPS ?
Doppler?
Towed - STW
Pressure - STW
Acoustic - STW or SOG
Impellor - STW
Electromagnetic STW
GPS - SOG
Doppler - STW or SOG
Janus configuration
60-60-60
It eliminates the error of pitching
4 Principle errors to consider for the Doppler speed log
VOMS
Velocity of sound errors, due to density/temp/salinity
Transducer Orientation error, excessive pitching and rolling
Motion error, excesssive vibration
Signal loss error, attenuation during transmission and reception
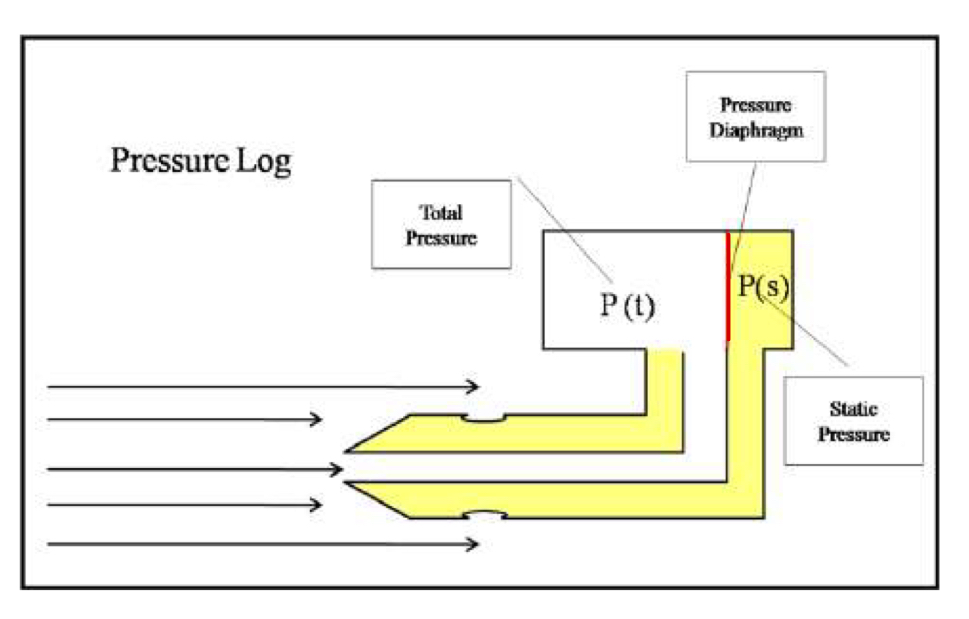
Pressure speed log
How it works?
a double walled tube and two orifices leading to a chamber with a diaphragm
Speed is calculated by measuring the difference between dynamic and static pressures at the diaphragm
only measure speed, not distance
Less prone to damage, but can become clogged
STW
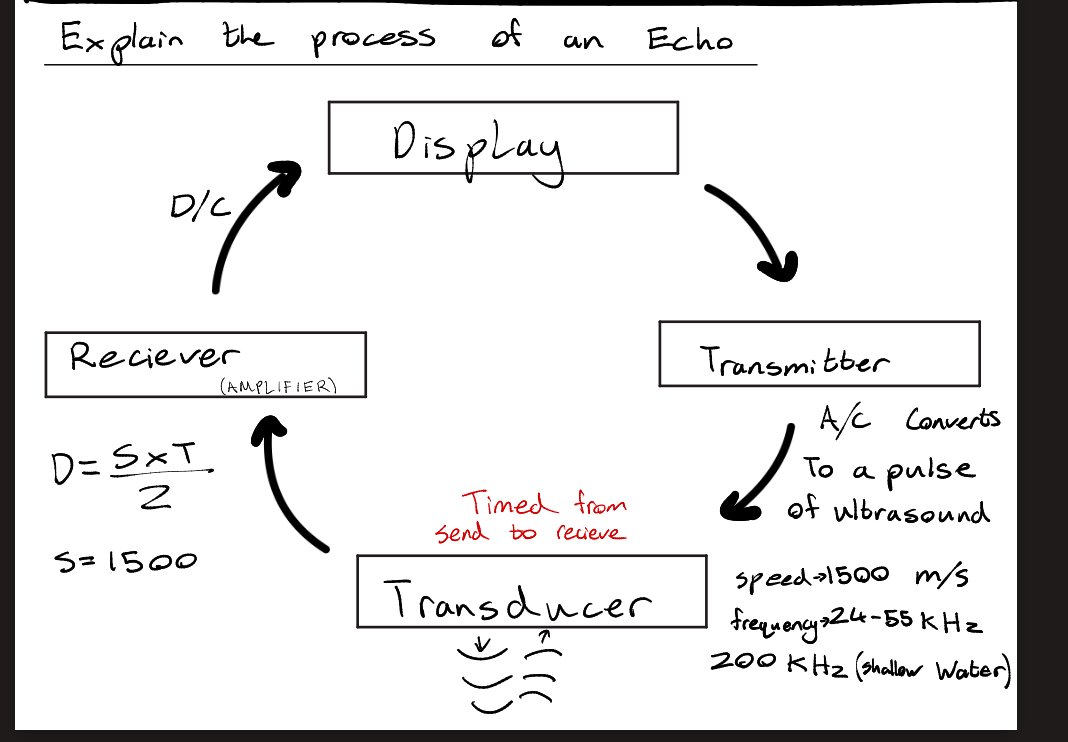
Echo sounders
How they work?
Use the principle of sound waves travelling through water and being reflected from other materials saucy as rock, sand and steel.
The Device basically measures the time interval between transmission of pulse of sound energy to reception after being reflected from seabed.
DSL
Deep Scattering Layer
A zone of higher density That reflects sound waves
State two common frequencies used by an echosounder?
24 to 55 kHz for deep water soundings
200kHz for shallow water
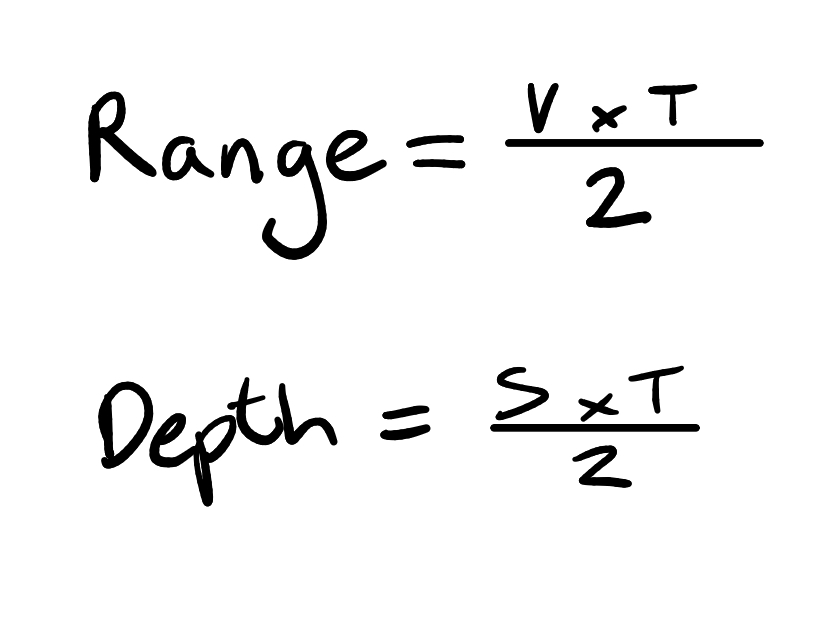
Range Formula
Depth Formula
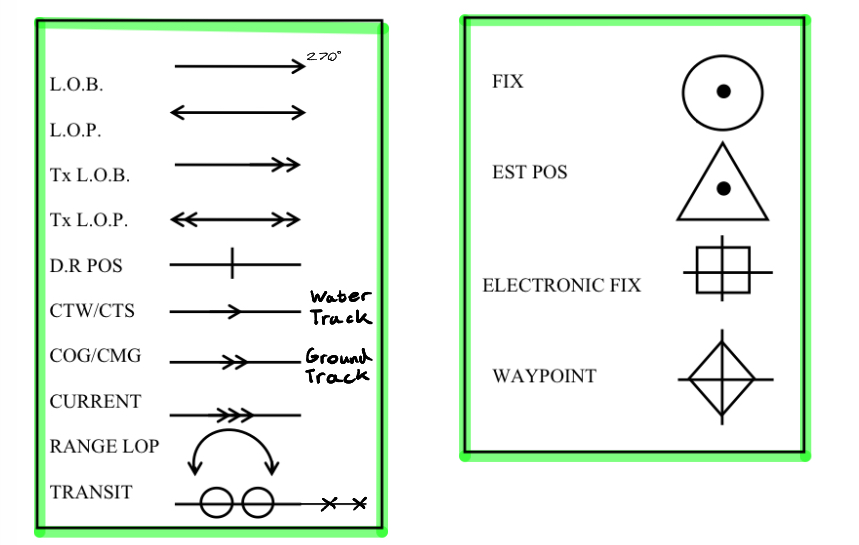
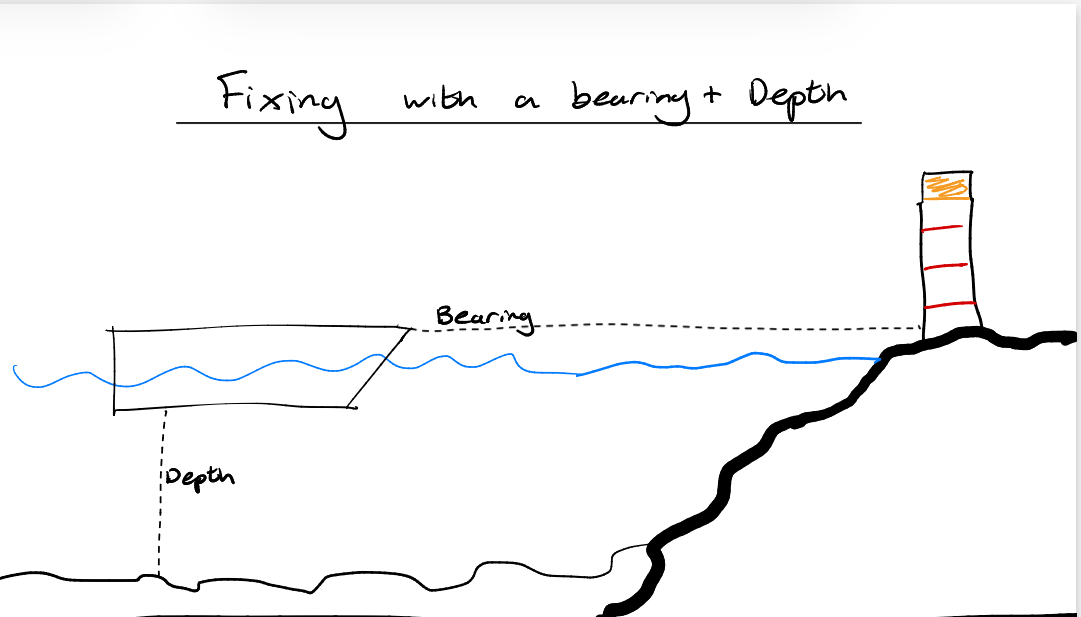
Fixing with a bearing + Depth
Echo sounder Controls (4)
Gain - controls the sensitivity of the device and works on the amplifier
Range - Determines the scale in use
Alarm - some echo sounder are fitted with a preset alarm to warn if you reach a depth less than it
Pulse - altering pulse length
Short pulse for shallow
Long Pulse for deep
Echo sounder Errors
DDEESSI
Density - Salinity, Temp, Depth
Datum
Multiple Echoes
Second trace Echoes
Fish Shoals
Seaweed/Kelp
Interference - Noise & Aeration
Echo Sounder error DDEESSI
Density
Salinity
Temperature
Depth
Effect the density of the water
Denser = Signal travels faster
Error, denser water may show inaccurate readings, less than actual depth
Speed of sound through water ?
1500m/s
Speed of light
300 000 000 m/s
Echo Sounder errors DDEESSI
Multiple Echoes
Same pulse may travel a number of times between the vessel and the seabed
Use the closest reading
Echo Sounder errors DDEESSI
Second trace Echoes
In very deep water, the time taken for a pulse to ravel to the seabed and return may be greater than the time between pulses
The transducer is receiving the echo from the last pulse and therefore giving an Innacurate depth that is shallower than true depth
Echo Sounder errors DDEESSI
Datum
The depth recorded will be in the depth below the transducer. This can be lead to error if the user is unaware whether the depth is DBKeel or DBSea or DBTransducer
Echo Sounder errors DDEESSI
Fish shoals
Some fish have swim bladders, these bladders being filled with gas can reflect sound waves making it an echo reading incorrect to the actual depth to seabed
Echo Sounder errors DDEESSI
Seaweed/Kelp
Very difficult to identify on an echo sounder, the bottom is usually clearly visible through the kelp.
Echo Sounder errors DDEESSI
Interference
Mechanical Noise - noise from engines and machinery
Electrical Noise - noise from electrical sources or radios
Water noise - rough weather or splashing waves on the hull
Aeration - bubbles passing the transducer reflect the sound waves, going astern, transducer placement etc
Electromagnetic wave?
A current passing through a wire produces a magnetic field around the wire
If its AC, its a ripple, acting as a transmitting signal.
Speed of light ?
300 Million m/s
300 000 000 m/s
Wave terminology
Amplitude - the height of antenna
Wavelength
Cycle
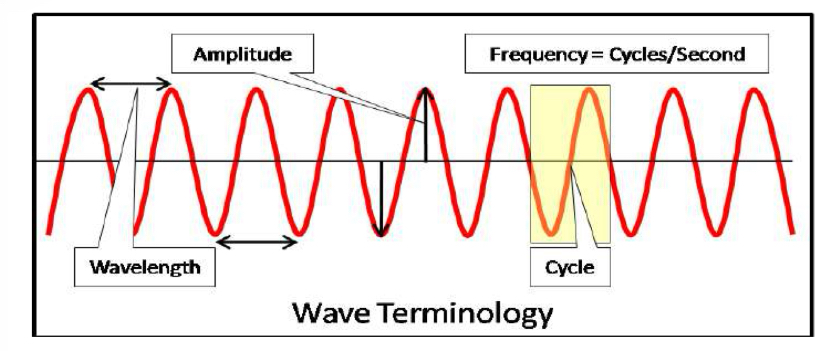
Frequency formula
Frequency equals Velocity over Wavelength
Attenuation ?
The term used to describe the weakening of a signal strength with distance from the transmitter,
Happens less in space, more through the earths atmosphere.
Propogation?
Sound needs a medium to travel through
Light does not, electro magnetic waves are self propagating
Ground waves?
Frequencies that follow the curvature of the earth
Medium frequencies
Sky waves?
Very high frequencies
Travel in straight lines, some penetrating through the ionosphere, others being reflected back
Line of sight
GNSS?
Global Navigation satellite systems
Satellite based positioning systems
very accurate clock
Sending signals, calculating speed and time interval for travel
Creating pseudo ranges
Multiple satellites repeating the process allow for a position fix
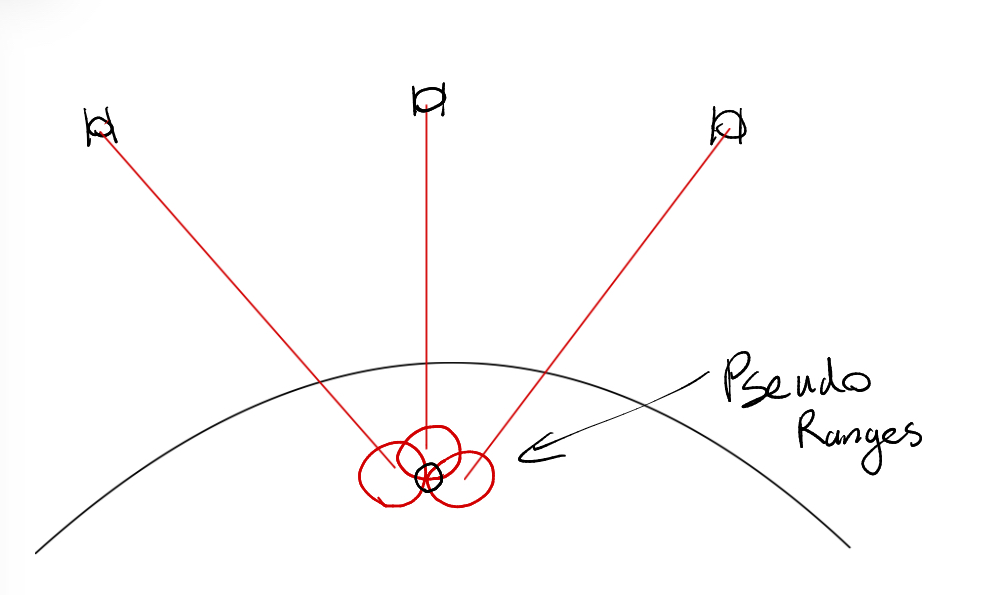
Why are Pseudo ranges innacurate?
The calculation includes a time value with an error, that’s why they use multiple satellites to fix the position
GNSS 3 components/segments ?
Space
Control
User segment
GNSS Space Segment
How many Satellites?
Orbital elevation? Above what?
How many can you see at all times?
What frequency?
Consist of 24 Satellites In 6 different orbits
Orbital elevation 20 200 Km above WGS84(Datum)
Orbital time - 12 Hours
The constellation ensures that at all times the earth stations can view 4 - 6 satellites more than 5 degrees above the horizon
UHF Frequency = Line of sight = little refraction
GNSS Control segment
How many earth stations?
Earths stations responsibilities?
How often is new information uploaded?
Almanac contains?
5 Earth stations
Constantly tracking the satellites and their position
Informations passed to the main control station
Main control station - Colorado Springs
This is where all the calculations are made for their next orbits
Every 8 hours the satellites come into view of Colorado and new information is uploaded to them, clocks adjusted.
Almanac includes , Time, Position, elevation
GNSS User segment
4 pieces?
What does the user do?
Antenna
Receiver - amplifier
Decoder
Display
Downloads Almanac of information from satellite
The Almanac that is downloaded from the satellite Contains…
The position, course and speed of the satellite
The time that the satellite will transmit the signal
WGS84 what is this datum ?
World geodetic system 1984
The horizontal datum relating to lat and long, the reference point for gps positions to be calculated
GNSS System errors
Errors that can affect range measurement.
MIDSEG
Multipath error
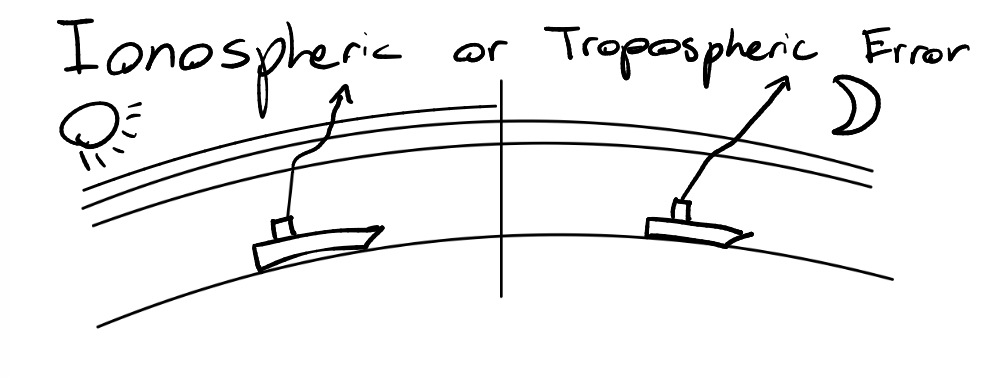
Ionospheric Error
Datum - WGS84
Satellite clock bias error
Ephemeris errors
GDOP - Geometric Dilution of Precision
GNSS System errors - Multipath Errors
MIDSEG
Multipath errors are caused by reflected signals from surfaces near the receiver
GNSS System errors - Ionospheric errors
MIDSEG
when the UHF signal passes through the Ionosphere and troposphere, the signal gets refracted slightly, giving an error by as much as 5m
GNSS System errors - Datum
MIDSEG
WGS84
World Geodetic System 1984
GPS positions will differ if the chart is dot using the same datum, up to 300m error, 6NM in extreme cases
GNSS System errors - Satellite Clock Bias
MIDSEG
Our clock is not as good as the clock onboard the satellite
GNSS System errors - Ephemeris error
MIDSEG
Positional errors
A result of incorrect orbital predictions of satellites
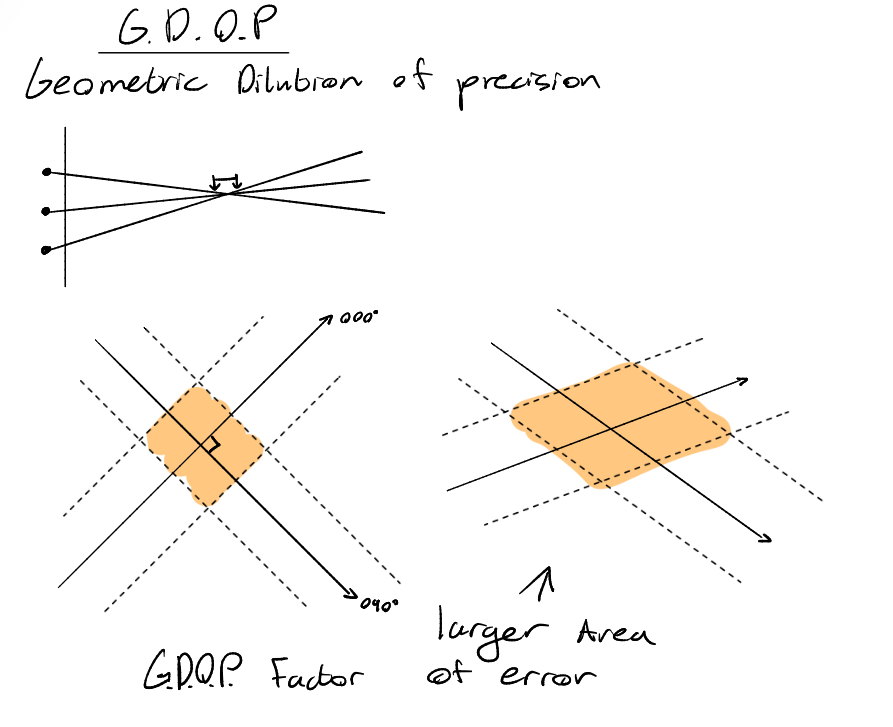
GNSS System errors - GDOP
MIDSEG
GDOP
Geometric dilution of precision
The orientation of the satellites around the receiver
Satellite geometry
Shallow angle = poor accuracy
What type of Dilution of Precision DOP is the mariner interested in?
HDOP
Lat and Long
= GDOP
= PDOP + TDOP
= HDOP + VDOP + TDOP
Position Dilution of position (Lat/Long/Altitude)
Time Dilution of position
Horizontal Dilution of position (Lat/Long)
Vertical Dilution of Position (Altitude)
GNSS System error Probability basis
95% probability
19 out of 20 occasions the error will be within the value
The remaining 5%, the error could be put to 3x the stated value
GNSS Selective availability
US Department of defense denied the civilian the same accuracy as the military.
Deliberately corrupting the time and position data signals
+ - 100m accuracy
System has been discontinued
GNSS
Why were Augmentation systems created ?
What Augmentation systems are there?
To provide corrections to the (SA) Selective availability Positions
GBAS and SBAS
Ground based And Satellite Based
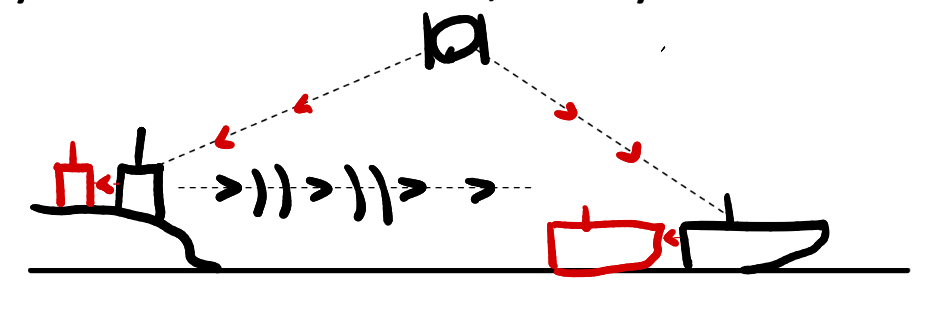
GBAS
How it works?
DGPS - Differential GPS
satellites would send incorrect positional data to the vessels and ground stations
The ground station would already know the true position of its own location
Calculating the innacuracy in the data and passing that information to vessels in the vicinity through VHF
Resulting In a fix accuracy of 5-10 meters
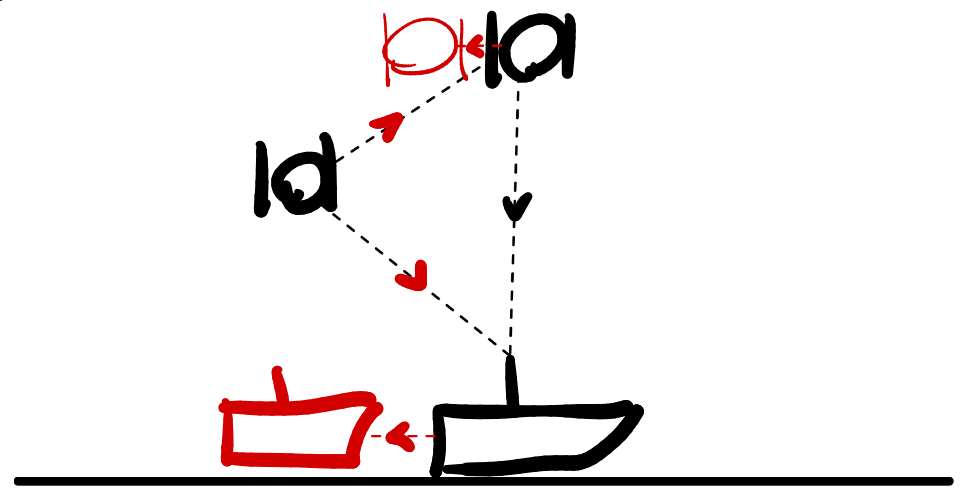
SBAS
How it works?
DGPS - Differential GPS
SBAS is far superior
greater coverage
better accuracy(3m)
UHF, no range limitations
satellites would send incorrect positional data to the vessels and geostationary satellites
The geostationary satellite would already know the true position of its own location
Calculating the innacuracy in the data and passing that information to vessels in the vicinity
Multiple satellites would be used to create a fix, with pseudo ranges
SBAS
WAAS?
N America : Wide Area Augmentation System
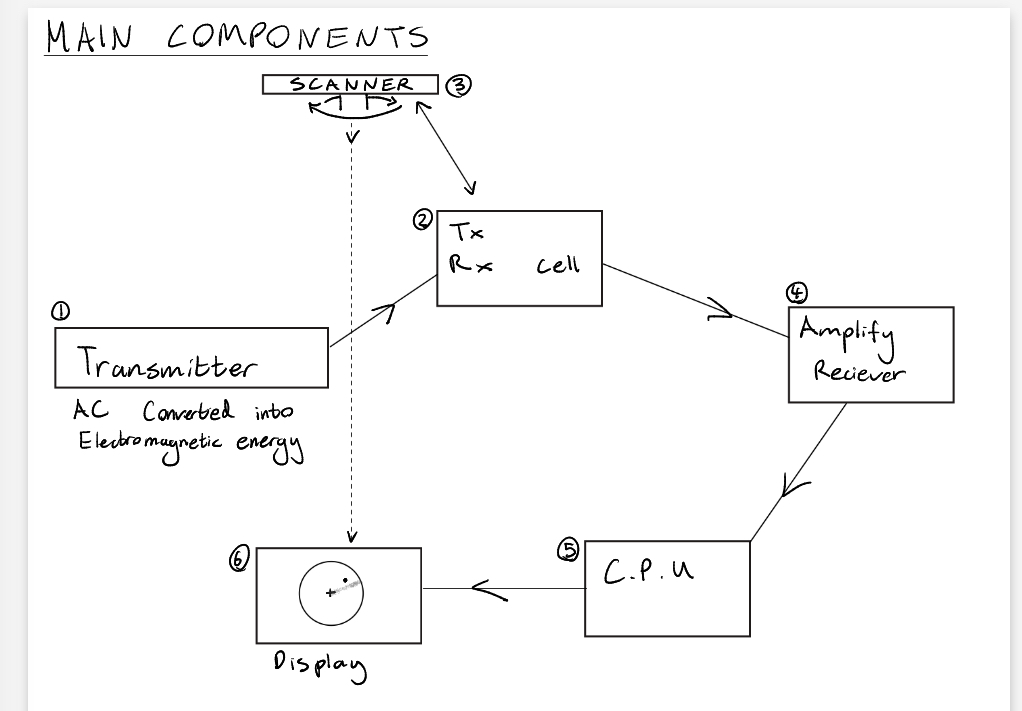
RADAR acronym?
Radio Detection and Ranging
Main components (6)
Transmittter
TX/RX Cell
Scanner
Receiver - Amplify
CPU
Display