15.1 - Simple Harmonic Motion
1/9
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
10 Terms
Simple Harmonic Motion (SHM)
Simple Harmonic motion is defined as motion that follows an oscillatory pattern about a given equilibrium position in magnitudes equal on each end of the equilibrium point.
For instance, imagine an ideal pendulum swinging back-and-forth relative to an equilibrium position: it swings in the same magnitude on either end of the equilibrium (let’s say 20 degrees) and continues this back-and-forth motion until a dampening force acts against it.
Frequency
Frequency is defined as the number of times per second that an object completes a full oscillation/cycle; the units for frequency is the hertz (Hz)

Period
Period is defined as the time for an object in SHM to complete a full cycle; it can also be thought of as inversely proportional to the frequency of the object itself. The units for the period are seconds.

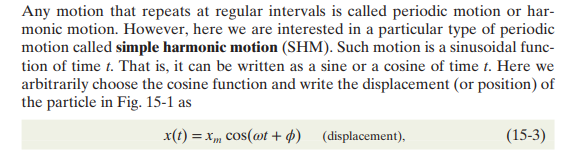
Position Function for SHM
SHM follows a sinusoidal pattern in terms of its motions (due to constantly swinging back and forth between highs and lows relative to the equilibrium position).
XM: Defined as the maximum displacement that the object has; if I took a pendulum and pulled it back 40 degrees, then Xm would be 40 degrees. Logically, this should make sense given that the cosine function alternates between -1 and +1, so the pendulum would oscillate between 40 degrees to the right and to the left of the equilibrium position (as expected).
w: Angular frequency of the object
t: time
Phi: the phase cosntant
Solving for Angular Frequency
The angular frequency can be solved for algebraically by realizing that the cosine function must equal itself after one full period of time has elapsed:
In other words, we have the following equation:
wt + 2pi = w(t + T)
wt +2pi = wt + wT
2pi = wT
w = (2pi)/T
Intuitively, this result should make sense since 2pi is the time taken for any cosine function to repeat itself, so we just see how much time our specific cosine function took to complete 2pi.
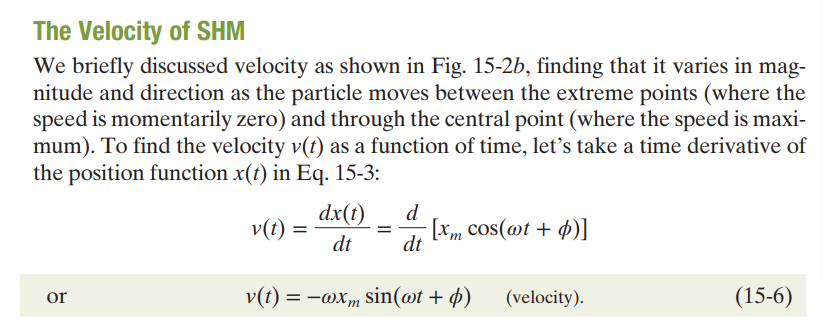
Velocity of SHM
By differentiating the trigonometric position function, we can obtain the velocity function for an object in SHM:
v(t) = -wxmsin(wt + phi)
Furthermore, we can realize that the maximum velocity obtained occurs whenever the sin function equals 1, so our maximum velocity is:
vmax = -wxm
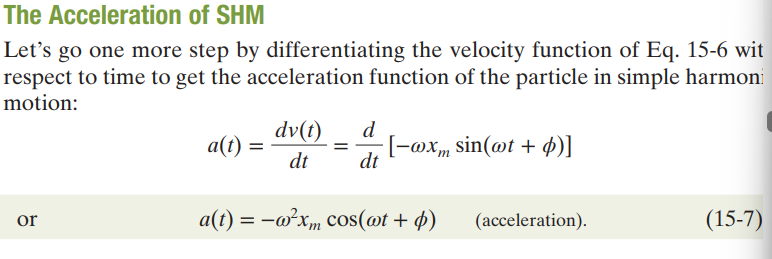
The Acceleration of an Object in SHM
Differentiating the velocity function will provide us with the acceleration of the object in SHM:
It must also be noted that the acceleration of the SHM follows an interesting relationship: it is directly proportional to the negative of the square of the angular velocity of its position; in essence, the acceleration is always opposite in sign to its position, which is why the restoring force is also opposite to the motion of the object.
Think of how a pendulum swinging to the right will naturally swing back to the left so as to go back to its equilibrium position: this only occurs because its acceleration is opposite in sign of its position → negative acceleration → force points to the opposite of the right → restoring force goes to the equilibrium position at the left.
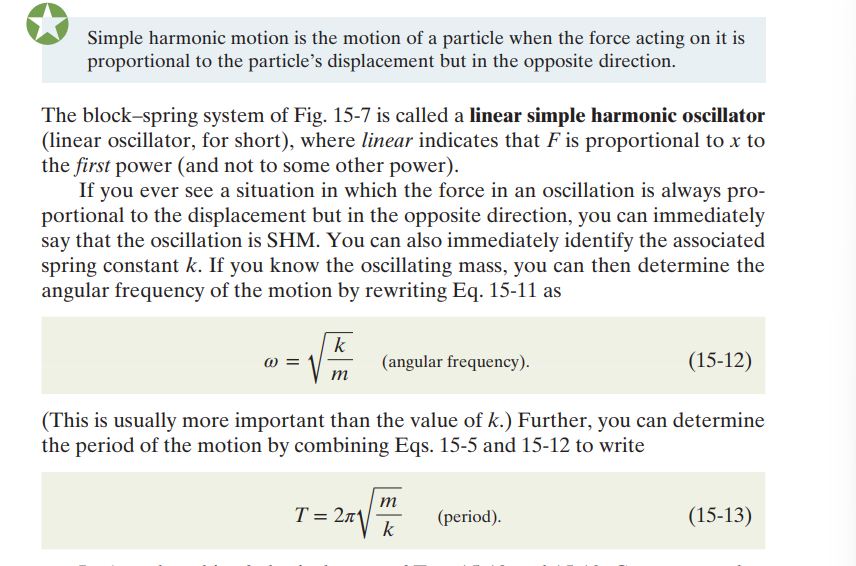
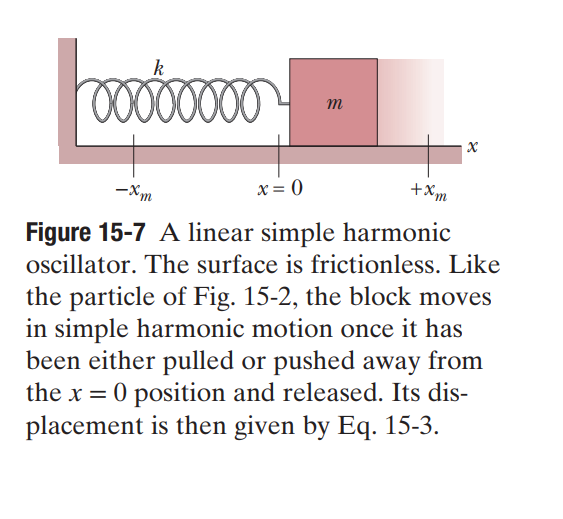
Linear Simple Harmonic Oscillator
A linear, simple, harmonic oscillator is a type of spring-mass system in which an object of mass m is attached to a spring that oscillates back and forth on a frictionless surface; since there are no dampening forces in this ideal situation, we assume that the mass will be able to go to its extremes on each oscillation (+, -xm)
Force Law for an Ideal Linear Oscillator
Since there is no friction, the sum of the forces of the object is just the restoring force of the spring, which follows Hooke’s Law as follows:
F= ma
-kx = ma(t)
But recall that the acceleration of the mass on the spring is dependent on the angular velocity and its position function: a(t) = -w²x(t)
-kx(t) = m(-w²x(t))
Cancel out the x(t) functions
-k = -mw²
k = mw²
From here, we can calculate both angular frequency and period.
Frequency and Period of a Linear Oscillator