matrix final
1/17
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
18 Terms
how to find eigenvalue
det(A-λI) - can be more than one ofc
how to find eigenvector
(A-λkI)=0 - row reduce, write eigenvectors in terms of free cols/parameters
where λk is a specific lambda value
equation for finding coefficients of orthogonal basis
where u is the ith vector and v is the vector ur solving for
is lambda=0 a valid eigenvalue?
yes! just means that matrix is non-invertible
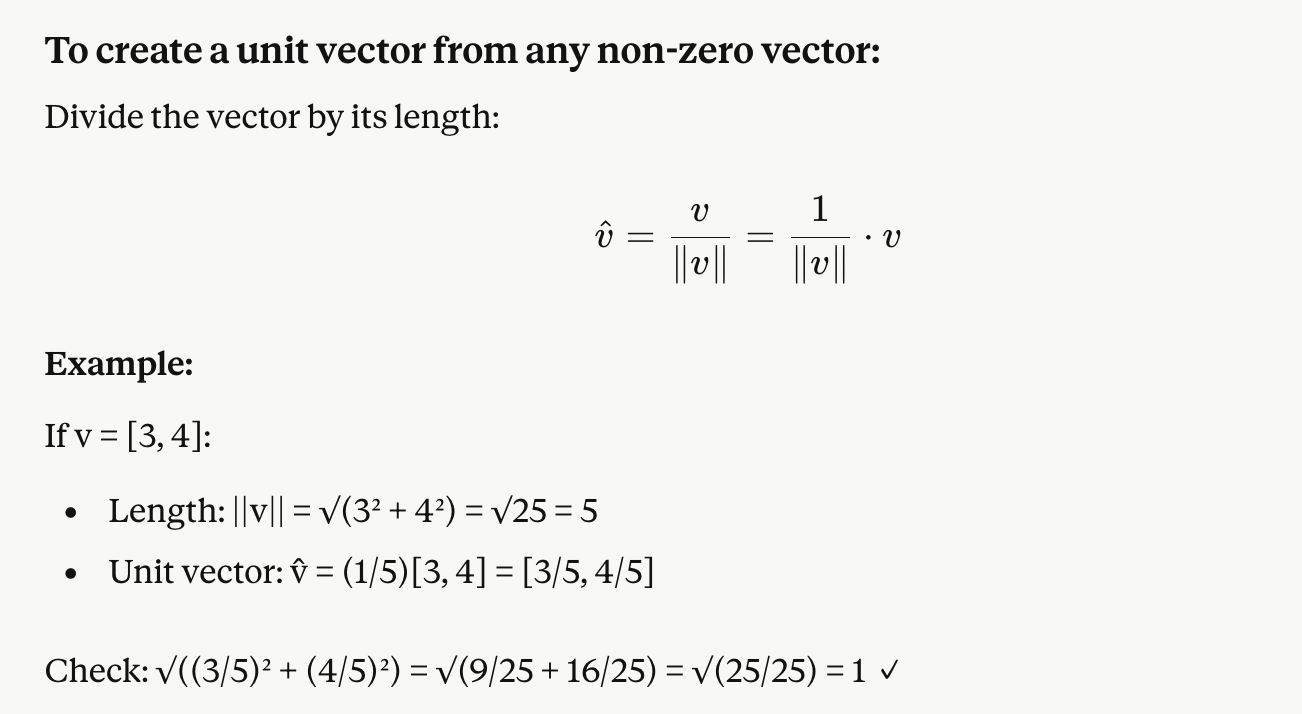
unit vector formula ( for orthonormal basis)
so here the unit vector itself isn’t 1 but when you take the mag of all components in the vector it equals 1
rules of an an orthognal matrix
the cols of the matrix (or rows) are orthonormal
the MT = M-1
all real eigenvalues are 1 or -1 ( therefore det(P)=-1or1)
two orthognoal matricies multiplied equals an orthogonal matrix
cause its the same thing as matrix multiplication with a 1×3 and a 3×1 matricies
orthogonal complement of S ( where s is a subspace)
set of vectors, where each vector is orthogonal to each vector in S
rules for orthogonal subspaces (s comp mainly)
If S is a k dim subspace for Rn then…
S comp is a subspace of Rn
S comp (dim) = n-k
only common vect contained in both is the zero vector
putting together the orthogonal basis for both S and S comp gives u orthogonal basis for Rn
gram-schmidt process + important notes
if we get any V as equal to 0 that means that W vector is a lin combo of the others - and we can omit that W from the spanning set

projection of x onto a subspace with an orthogonal basis
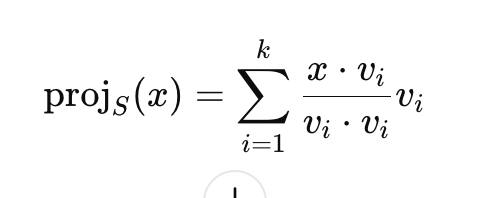
def of a projection
( or parallel to V if it easier to think of it that way)

Perpendicularity only applies to vectors not points heres why…
P lies on the line, the vector {OP} = (1,4) is:
* just a vector from the origin to that point
* not aligned with the line’s direction
By trying to find the normal by dotting it with paint P I’m treating P like a direction vector and not a point - which is incorrect , cause if it was a direction vector it would not be going in the same direction as the line … hence why this doesnt work
elementary matices notes
when writing row operations as a product of elementary matricies we reverse the order ( first row operation is the last matrix) because ur basically doing function composition
E3(E2(E1(A)))
and since matrix multiplication isnt communicative, E1 gets multiplied by A first even tho its on the right!
the product of these elementary matrices also gives you A-1 , since the collection of elementary matrices representing row reductions reduce A to the identity matrix - so they represent A-1
closest point in a subspace formula

solving for orthogonal vectors
dont forget u ahve 2 ways to do this
if ur finding a vector orthogonal to 2 other vectors only u can do cross product
or if u have more vectors you can solve the linear system where first vector dot x equals 0, and the secound, and the third, and so on solving for x in terms of paramters
col(A) general eq + facts
Col(A) → Ax=b
since its about outputs it is a subspace of Rm - each vect in the col space has m components
Null(A) general eq+ facts
general eq→ Ax=0
since its about inputs its a subspace of the domain Rn - each vector in the null space has n components