матмод экз
1/32
Earn XP
Description and Tags
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
33 Terms
Понятие модели
Это представление объекта, системы или понятия в некоторой форме отличной от формы их реального существования. Это средство помогающее в понимании объяснении или совершенствовании системы. Оно способствует пониманию и изменению окружающей среды
Функции моделей
Средство осмысления действительности (реальных связей и закономерностей)
средство общения (сжато и точно описывает объект)
средство обучения и тренажа
инструмент прогнозирования
средство постановки экспериментов и тд
Классификация моделей
по t Статические и динамические
по учету случайности Детерминированные и стохастические
по состояниям дискретные и непрерывные
по способу реализации физическая натуральная, масштабированные
по способу отражения аналоговые (свойства одного объекта через свойства другого)
управленческие игры
по форме представления математические модели (символические)
Математические делятся на:
1. функциональные и структурные (по характеру отображаемых признаков)
2. По уровню абстракции - микроуровень, макроуровень, метауровень
Модели на микро-, макро - и метауровне
Микроуровневые модели
1. описывают физическое состояние и процессы в сплошных средах
2. Фазовые переменные зависят от координат и времени T(x, y, z, t), p(x, y, z, t), потанцевал
Описываются дифференциальными уравнениями в частных производных
Используют аппарат математической физики
Примеры: модель движения газа в трубе, модель распределения и течения топлива в крыльях самолета
Макроуровневые модели
1. Описывают систему как набор отдельных элементов
Происходит дискретизация пространства
фазовые переменные перестают зависить от координат, а зависят только от времени
Пример: модель взаимодействия элементов электрической цепи через ток и напряжение, давление на входе выходе и середины трубы
Метауровневые
Описывают поведение сложных систем, состоящих из подсистем и их взаимодействие с внешней средой и между собой
Описываются интегральные характеристики
Математика: системы ОДУ, логические и имитационные модели
Суть: изучается поведение системы из взаимодействующих систем
примеры: микросервисное приложение, транспортная система города
Требования к "хорошей" модели
адекватность (соответсивие реальному объекту)
простота
целенаправленность (решает конкретную задачу)
надежность
полнота
адаптивность
экономичность
Основные этапы процесса моделирования.
постановка задачи (что нужно, какой тип модели будем использовать)
построение модели
исследование модели (симулирование, получение результатов, расчеты)
проверка, поиск изъян (верификация)
Анализ линейных математических моделей, основные его этапы
Пусть задана линейная динамическая модель с постоянной матрицей
dx/dt = Ax + b
Этапы:
Получение решения
Получение стационарного решения и анализ его устойчивости
определение наблюдаемости отдельных составляющих решения, оценка их роли в системе
решение задачи параметрической идентификации
Решение задачи управления или выбора оптимальных значений параметров
Фазовые портреты для моделей первого порядка
Для моделей первого порядка
dx/dt = f(x), x(0) = x0
типы фазовых портретов
одноточечный
интервальный
полуоткрытый
если f(x) < 0, влево, иначе, вправо

Фазовые портреты для моделей второго порядка
dx/dt = Ax
x = Uy
d Uy/dt = AUy
U dy/dt = AUy / U^-1
dy/dt = diag(l1, l2)y
есть 3 варианта
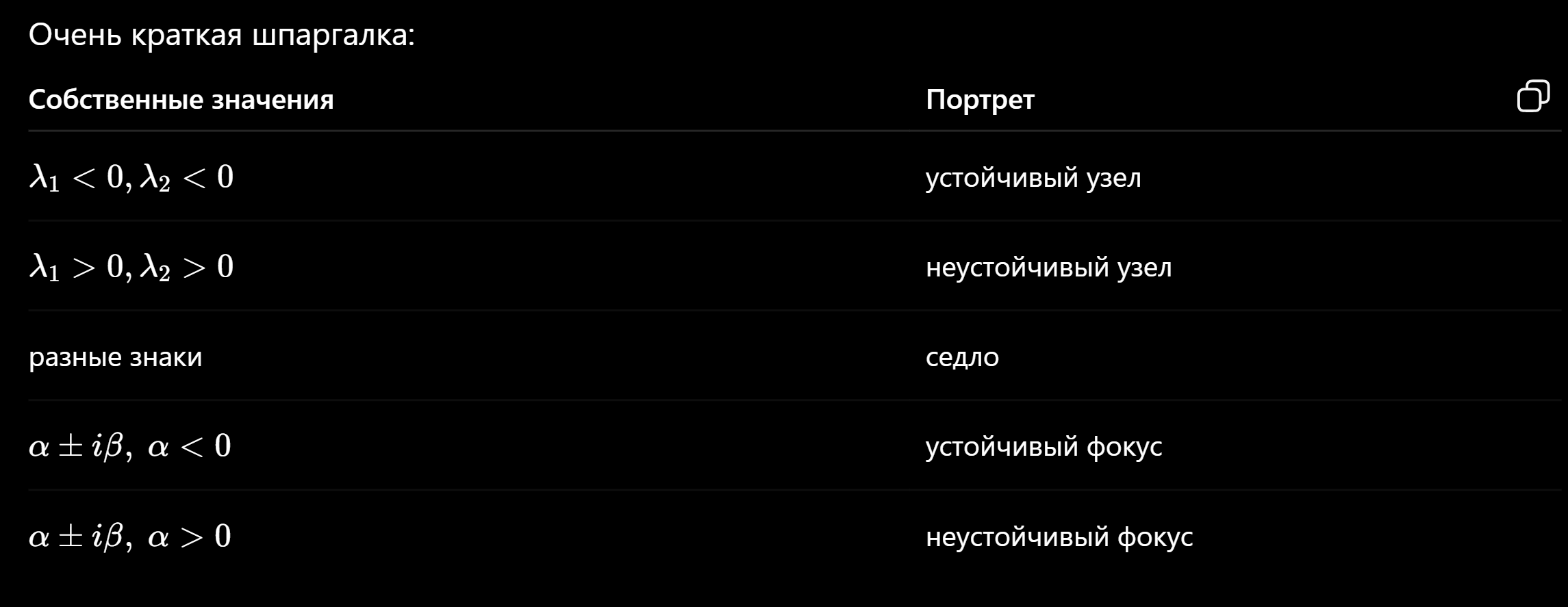
1 вариант что собственные значения вещественные одного знака
тогда мы выражаем y2 = C3y1²
если лямбда 1 и лямбда 2 меньше нуля, получаем устойчивый узел, иначе неустойчивый
2 вариант что они вещественного разного знака, выражаем C3 = C2C1
плюс берем просто что y1’ = y1, y2’ = -y2, получаем 4 гиперболы и седло
3 вариант комплексно сопряженная пара
приходим к косинусам и синусам, C1=C2=1 подставляем и по формуле и в квадрат сворачиваем
если альфа меньше нуля то устойчивый фокус (закручиваем спираль)
если альфа больше нуля неустойчивый фокус (раскручиваем спираль)
Получение решения линейной модели (построение матричной экспоненты и интеграла от нее
Сначала мы приравниваем производную к нулю и находим стационарные точки системы, то есть состояния равновесия, затем по собственным значениям матрицы системы проводим анализ их устойчивости и определяем, притягивают ли они траектории или наоборот отталкивают. Далее рассматривается точное решение линейной системы через матричную экспоненту и интеграл от неё, которое полностью описывает поведение системы во времени, однако прямое вычисление этих выражений на каждом временном промежутке является вычислительно сложным и неэффективным, особенно для больших матриц и длительных интервалов времени. Поэтому мы переходим к пошаговой дискретной форме по времени, где решение считается на отдельных временных шагах и сохраняются промежуточные результаты. Для ускорения вычислений используется процедура удвоения шага, при которой сначала вычисляют матричную экспоненту и соответствующий интегральный вклад на малом шаге, а затем строят значения на более крупных шагах путём последовательного удвоения, используя уже полученные результаты без пересчёта с нуля. Повторяя эту процедуру несколько раз, получают значения матричной экспоненты и интеграла на нужном временном интервале, после чего можно последовательно вычислять значения решения системы в дискретные моменты времени, получая её поведение на всём промежутке.
Наблюдаемость отдельных составляющих решения линейной системы. Пример программы модального анализа.
берем систему dx/dt = Ax
записываем решение x(t) = e^At * x0 = формула лагранжа сильвестра|
мода это любой кый элемент решения из лагранжа сильвестра
из нее достаем Dk - вклад к-ой моды в решение (const для одной моды)
uk(p)Dk - амплитуда моды
отношение этих амплитуд Dk сокращается p(p,s) = uk(p)/uk(s)
1. Оценка поведения k-й моды.
По заданному номеру моды kkk анализируется её проявление во всех компонентах системы. Строятся таблицы наблюдаемости (распределение ρ(p,s)\rho(p,s)ρ(p,s)) и возмущаемости (по компонентам vkv_kvk). Моды, проявляющиеся во многих компонентах, называются системными, а локально проявляющиеся — локальными.
2. Наблюдение в заданном узле.
По выбранному узлу анализируется вклад всех мод в данной компоненте в виде величин uk(p)Dku_k^{(p)}D_kuk(p)Dk. Определяются наиболее наблюдаемые моды в этом узле.
3. Возмущение в заданном узле.
Оценивается, какие моды и в каких частях системы наиболее сильно возбуждаются при возмущении данного узла, а также где эти моды наблюдаются максимально эффективно.
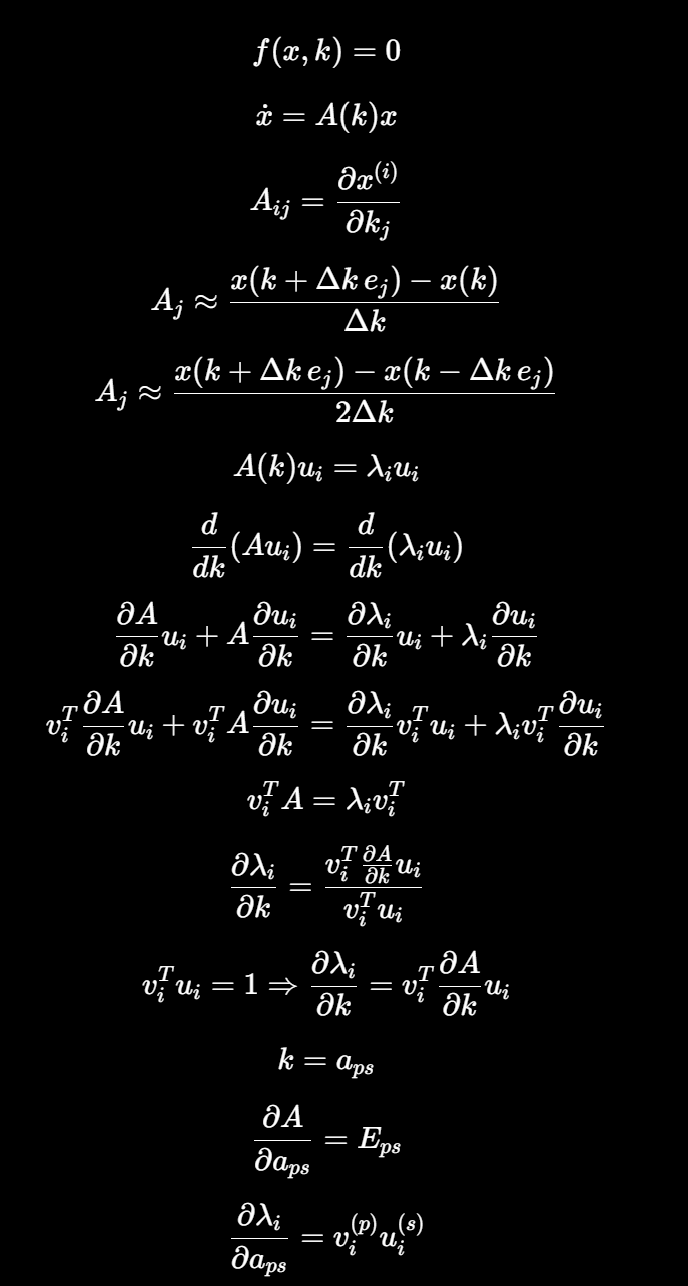
Анализ чувствительности. Чувствительность составляющих решения к вариации параметров.
Для статической модели вводится матрица чувствительности, элементы которой представляют собой производные компонент решения по параметрам системы.
Эти производные оцениваются численным дифференцированием: либо через односторонние разности, когда параметр немного увеличивается и пересчитывается решение системы, либо через центральные разности, когда решение считается при небольшом увеличении и уменьшении параметра, что повышает точность, но требует больше вычислений.
Если исходная система является динамической, то матрица чувствительности перестаёт быть постоянной и становится функцией времени, так как само решение зависит от времени.
Для линейной динамической системы поведение решения и его чувствительность в значительной степени определяются собственными значениями и собственными векторами матрицы системы, так как именно они задают модальную структуру и динамику системы.
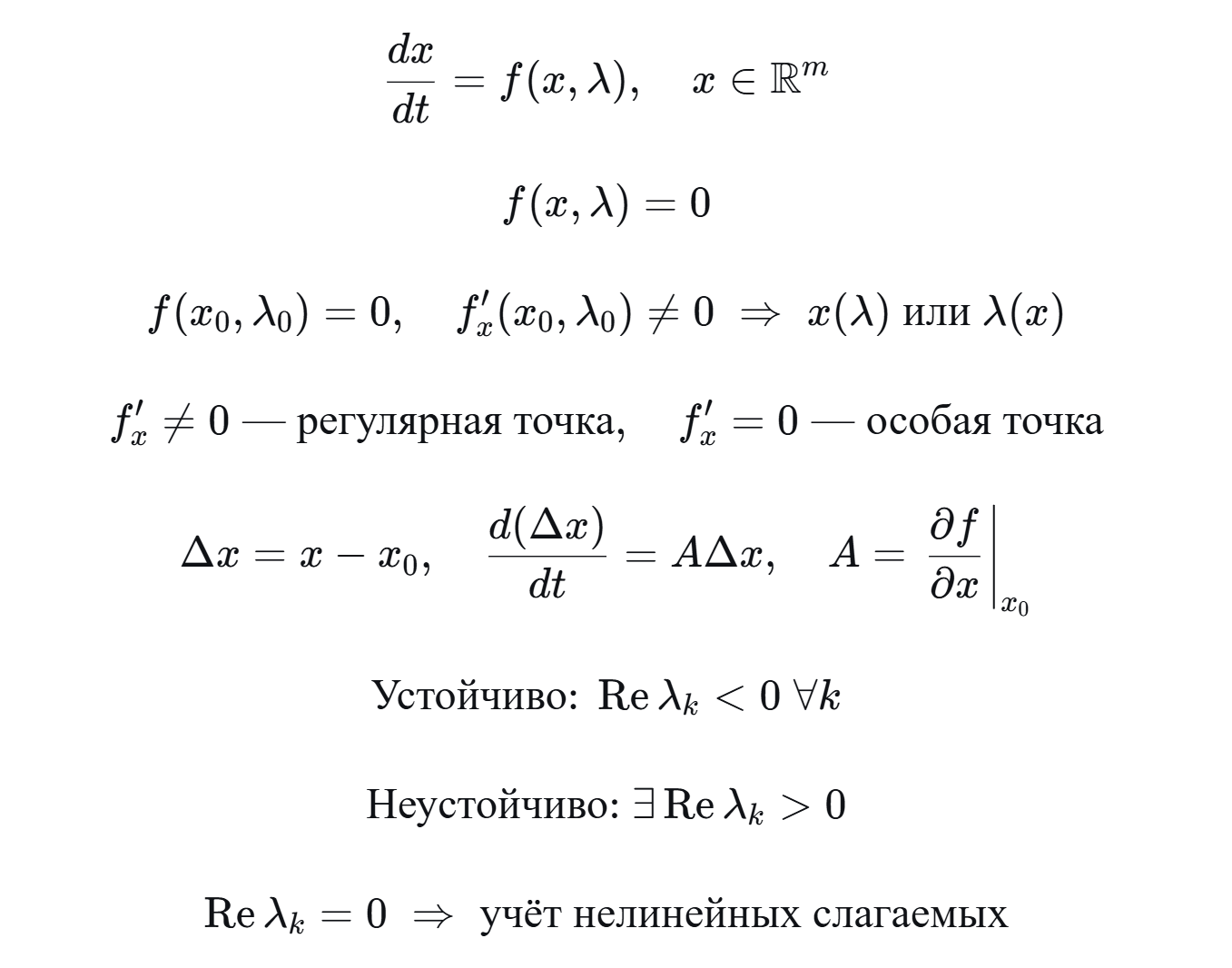
Анализ нелинейных моделей. Основные этапы. Теорема о неявных функциях. Классификация равновесных точек и их устойчивость.
Рассматриваем систему dx/dt = f(x, lambda), x принадлежит R^m
Основные этапы
1. нахождение стационарных точек (систему к нулю)
2. определение их устойчивости
3. ДСР
4. БД
Теорема
пусть есть область D содержит точку x0 l0, f(x0,l0) = 0, сама функция неприрывно диффиренцируема, Если f’x(x0,l0) ≠ 0, то f(x,l) имеет одно единственное непрерывно диффиринцируемое решение x(l), x(l0) = x0, если частная производная по лямюбда не равна нулю то уравнение имеет одно единственное непрерывно диф решение l(x), l(x0) = l0
Точки
регулярная - одна или другая частная производная пп равна нулю
особая - две равны нулю
двойная особая - существует две ветви решения
особая точка высокого порядка - частные производные пп равны между собой и равны частной производной вп системы, при этом частная производная второго порядка по иксу не равна нулю
Устойчивость
Линеризация по малым отклоенениям
Критерий ляпунова ну сам знаешь (если 0)
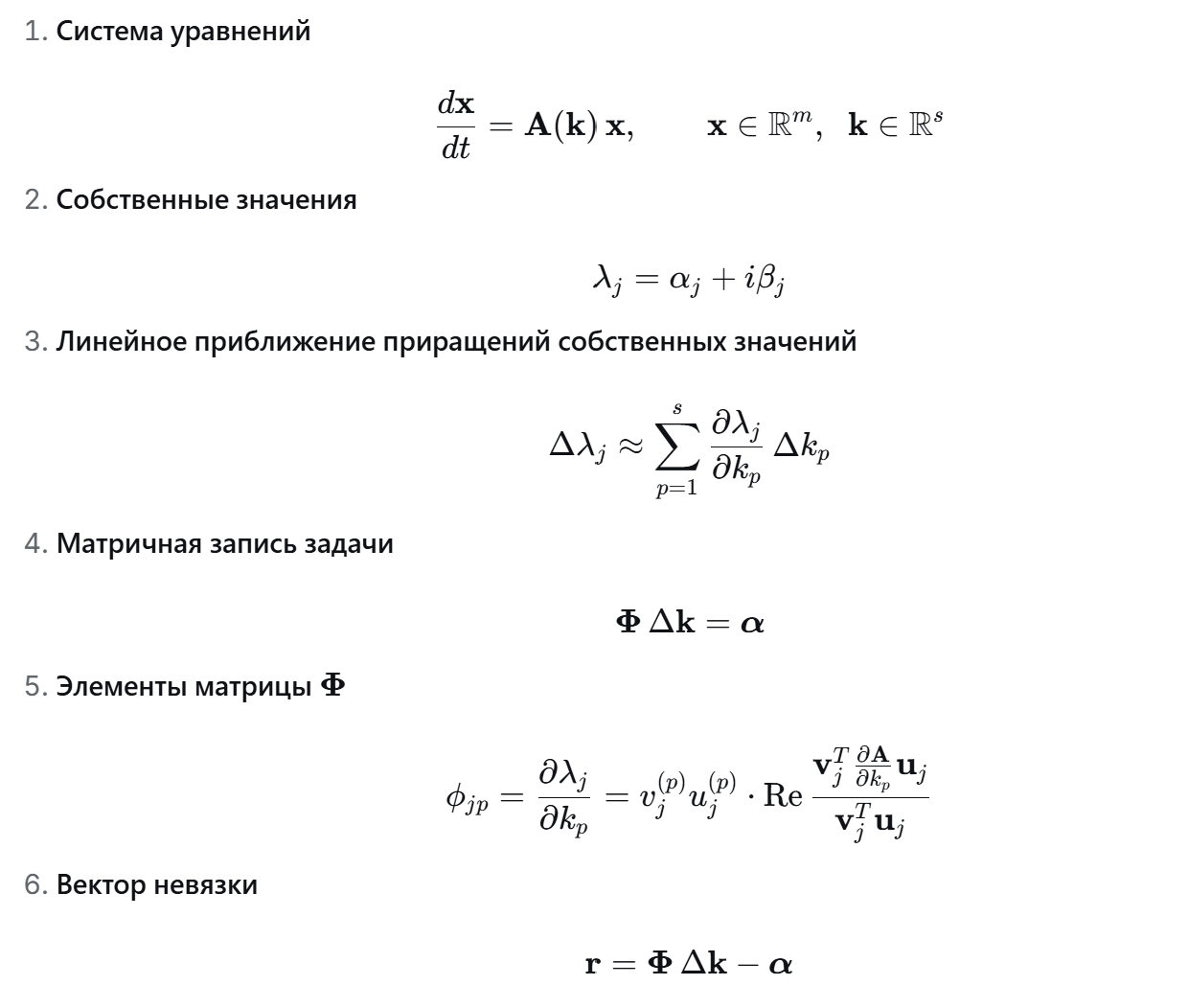
Управление устойчивостью в линейной динамической модели (использование сингулярного разложения и программы SVD).
Рассматривается система dx/dt = A(k)x. Требуется выбрать параметры k так, чтобы обеспечить сдвиг собственных значений влево на комплексной плоскости, что повышает устойчивость системы.
Берётся начальное значение k0 и малое приращение Δk. Зависимость собственных значений от параметров нелинейна, поэтому используется линейное приближение через чувствительности.
В результате получается система ΦΔk = α, где Φ — матрица чувствительности, α — требуемое смещение спектра.
Так как матрица Φ обычно прямоугольная, точного решения может не существовать. Поэтому задача сводится к поиску такого Δk, которое минимизирует норму невязки ||ΦΔk − α||.
для решения задачи используется сингулярное разложение (SVD), которое позволяет найти решение минимальной нормы, обеспечивающее наилучшее приближение требуемого смещения спектра.
Орбитальная устойчивость периодического решения. Уравнение в вариациях. Критерий.
Рассматривается система dx/dt = f(x). Пусть x(t) – периодическое решение с периодом T, Г0 – его траектория. Расстояние от точки a до траектории Г0 – это минимальное евклидово расстояние от a до любой точки на Г0.
Решение x(t) называется орбитально устойчивым, если для любого положительного эпсилон найдётся положительное дельта такое, что если начальное расстояние другого решения y(t) до траектории Г0 меньше дельта, то при всех t больше или равно t0 расстояние от y(t) до Г0 меньше эпсилон. Если вдобавок расстояние стремится к нулю при t стремящемся к бесконечности, то решение асимптотически орбитально устойчиво. Замкнутая орбитально устойчивая траектория называется устойчивым предельным циклом.
Уравнение в вариациях получается при подстановке x(t) = p(t) + Δx(t) в исходную систему и линеаризации. Оно имеет вид d(Δx)/dt = A(t) Δx, где A(t) – матрица Якоби, вычисленная на периодическом решении p(t). Эта матрица периодическая с периодом T.
Для линейной системы с периодическими коэффициентами фундаментальная матрица представляется в виде L(t) e^{Rt}, где L(t) – периодическая, R – постоянная. Матрица монодромии U(T) = e^{RT} имеет собственные числа – мультипликаторы. Один мультипликатор всегда равен 1 (соответствует направлению вдоль траектории).
Критерий орбитальной устойчивости: все мультипликаторы по модулю меньше единицы, кроме одного, равного единице.
Понятие бифуркации. Точки ветвления и поворота, бифуркация Андронова-Хопфа.
Бифуркация – качественное изменение поведения системы при малом изменении параметра. Переход устойчивости в неустойчивость или наоборот.
Точка поворота: на диаграмме стационарных решений исчезает или появляется пара решений. Условия: первая производная по x равна нулю, а по параметру – нет. В многомерном случае определитель полной матрицы Якоби равен нулю, но после удаления любого столбца – не равен.
Точка ветвления (сингулярная точка): обе первые производные (по x и по параметру) равны нулю. Характер ветвления определяется квадратичными членами разложения. Из дискриминанта D = B² – 4AC: если D>0 – две пересекающиеся ветви (четыре дуги), если D=0 – касание, если D<0 – нет ветвления.
Бифуркация Андронова-Хопфа: пара комплексно-сопряжённых собственных значений матрицы Якоби пересекает мнимую ось (Re(λ)=0).
Методы получения стационарных решений. Метод продолжения по параметру
Стационарные решения системы dx/dt = f(x, λ) находятся из уравнения f(x, λ) = 0. Диаграмма стационарных решений строится дискретизацией параметра λ: задаются λ_k = λ_0 + k·Δλ, для каждого λ_k решается система f(x, λ_k)=0 методом Ньютона, где в качестве начального приближения берётся решение x_k с предыдущего шага. Основная проблема – выбор хорошего начального приближения x_0.
Метод продолжения по параметру (гомотопия) решает эту проблему. Вводится вспомогательный параметр τ ∈ [0,1] и строится функция H(x, τ) такая, что:
при τ = 0 уравнение H(x, 0) = 0 решается тривиально (известно x*);
при τ = 1 H(x, 1) = f(x, λ) (исходное уравнение).
Примеры гомотопий:
H(x, τ) = f(x) – (1–τ)·f(x*)
H(x, τ) = (1–τ)(x – x*) + τ·f(x)
Далее последовательно решают H(x, j/N)=0 при j = 0,1,…,N методом Ньютона. При j=0 решение x* известно. Решение x_j служит начальным приближением для x_{j+1}. В конце получаем x_N – искомое решение. В каждой найденной точке вычисляется матрица Якоби и её собственные значения для оценки устойчивости (раскраска диаграммы).
![<p>Стационарные решения системы dx/dt = f(x, λ) находятся из уравнения f(x, λ) = 0. Диаграмма стационарных решений строится дискретизацией параметра λ: задаются λ_k = λ_0 + k·Δλ, для каждого λ_k решается система f(x, λ_k)=0 методом Ньютона, где в качестве начального приближения берётся решение x_k с предыдущего шага. Основная проблема – выбор хорошего начального приближения x_0.</p><p class="ds-markdown-paragraph">Метод продолжения по параметру (гомотопия) решает эту проблему. Вводится вспомогательный параметр τ ∈ [0,1] и строится функция H(x, τ) такая, что:</p><ul><li><p class="ds-markdown-paragraph">при τ = 0 уравнение H(x, 0) = 0 решается тривиально (известно x*);</p></li><li><p class="ds-markdown-paragraph">при τ = 1 H(x, 1) = f(x, λ) (исходное уравнение).</p></li></ul><p class="ds-markdown-paragraph">Примеры гомотопий:<br>H(x, τ) = f(x) – (1–τ)·f(x*)<br>H(x, τ) = (1–τ)(x – x*) + τ·f(x)</p><p class="ds-markdown-paragraph">Далее последовательно решают H(x, j/N)=0 при j = 0,1,…,N методом Ньютона. При j=0 решение x* известно. Решение x_j служит начальным приближением для x_{j+1}. В конце получаем x_N – искомое решение. В каждой найденной точке вычисляется матрица Якоби и её собственные значения для оценки устойчивости (раскраска диаграммы).</p><p></p>](https://assets.knowt.com/user-attachments/e029bad4-7b2b-47e9-9662-494aeb7bac54.png)
Определение бифуркационных точек поворота, ветвления, Андронова-Хопфа.
Расширяем вектор x за счёт параметра λ, получаем матрицу Якоби J размером n×(n+1). J_k – матрица J без k-го столбца. Условие для точек поворота и ветвления: det(J_{n+1})=0. Отличие: если det(J_k)≠0 для всех k≠n+1 – точка поворота; если существует k≠n+1 с det(J_k)=0 – точка ветвления.
На практике решают систему f=0, J_{n+1}·v=0, v^{(k)}=1, где v – вектор из R^{n+1}.
Бифуркация Андронова-Хопфа: появление пары чисто мнимых собственных значений у матрицы Якоби исходной системы (размер n×n) при некотором λ=λ₀, а остальные n−2 значений имеют отрицательные вещественные части. Для её нахождения решают систему из f(x,λ)=0, J·u = –β·v, J·v = β·u, с нормировкой |u|²+|v|²=1 и фиксацией фазы (например, u^(k)=0).
Для системы размерности 2×2 условия упрощаются: бифуркация Андронова-Хопфа происходит при tr J = 0 и det J > 0. При этом β = √(det J). Просто равенство следа нулю без положительного определителя не даёт чисто мнимых корней (может быть седло или нуль).
Получение периодического решения, его орбитальная устойчивость.
Ищется периодическое решение системы dx/dt = f(x) с периодом T: x(0) = x(T). Заменой τ = t/T переходим к безразмерному времени, чтобы период стал равен 1. Правильная замена даёт уравнение dx/dτ = T·f(x). Условие периодичности: x(1) = x(0). Неизвестными являются n компонент начального вектора x(0) и период T – всего n+1 неизвестных. Уравнений n (векторное равенство x(1)=x(0)). Для устранения неоднозначности фиксируют одну компоненту начального вектора: x⁽ʲ⁾(0) = μ.
Для оценки орбитальной устойчивости вычисляют матрицу монодромии U(1). Её элементы u_{ik}(τ) = ∂x⁽ⁱ⁾(τ)/∂x⁽ᵏ⁾(0) – чувствительности решения к изменению начальных условий. Они удовлетворяют уравнению в вариациях: T·du_{ik}/dτ = Σ (∂f⁽ⁱ⁾/∂x⁽ˢ⁾)·u_{sk} с начальным условием u_{ik}(0)=1 при i=k и 0 иначе. Систему из n уравнений для x и n² уравнений для u_{ik} решают совместно. Собственные числа μ_k матрицы монодромии U(1) называются мультипликаторами. Один мультипликатор всегда равен 1 (соответствует сдвигу вдоль траектории). Периодическое решение орбитально устойчиво, если все остальные мультипликаторы по модулю меньше 1.
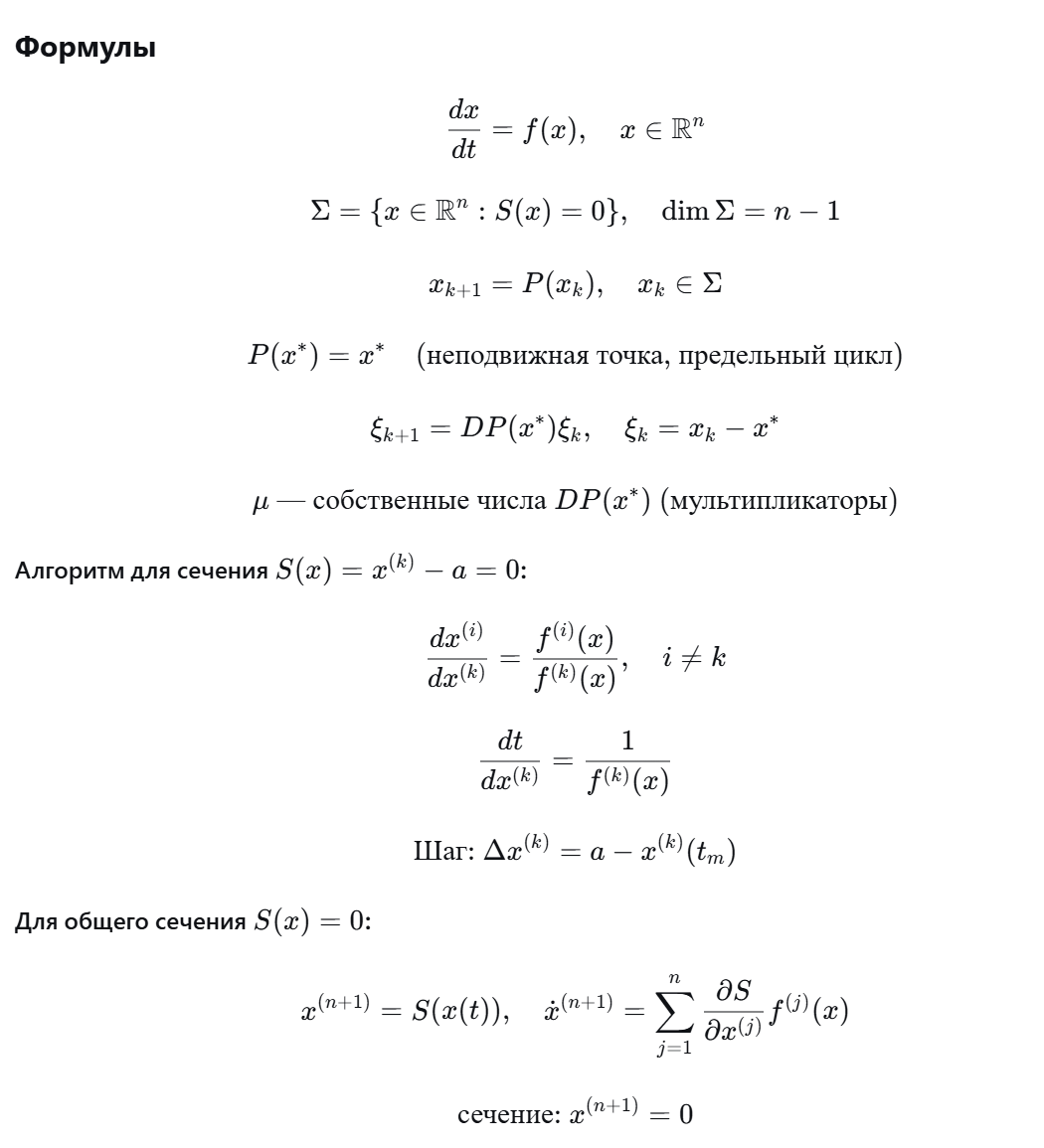
Виды бифуркации периодического решения. Отображение Пуанкаре, алгоритмы его построения.
Отображение Пуанкаре. Вместо исследования всей траектории системы рассматриваются только моменты её пересечения с выбранной гиперплоскостью (сечением) Σ, расположенной поперёк потока. Размерность отображения на единицу меньше размерности исходной системы. Отображение P ставит в соответствие точке x на Σ координаты первого следующего пересечения траектории с Σ. Предельному циклу Γ соответствует неподвижная точка x* = P(x*). Устойчивость цикла определяется мультипликаторами – собственными числами матрицы линеаризации P в неподвижной точке. Алгоритм численного построения P: интегрируем систему до смены знака функции сечения S(x), затем на последнем шаге переходим к интегрированию по координате, обеспечивающей точное попадание на Σ.
Бифуркации периодических решений по мультипликаторам.
Седло-узловая (касательная) бифуркация – нетривиальный мультипликатор становится равным +1. При λ < λ* существуют устойчивый и неустойчивый циклы, при λ = λ* они сливаются в полуустойчивый, при λ > λ* исчезают. Обратно – рождение пары из ничего.
Бифуркация удвоения периода – мультипликатор становится равным –1. При λ < λ* – устойчивый цикл периода T. В точке бифуркации цикл нейтрален. При λ > λ* исходный цикл неустойчив, рождается устойчивый цикл периода 2T.
Бифуркация Неймарка–Сакера (рождение тора) – пара комплексно-сопряжённых мультипликаторов выходит на единичную окружность: |μ₁,₂| = 1, μ₁,₂ = e^{±iφ}, φ ≠ 0, π. При λ < λ* – устойчивый цикл (в сечении устойчивый фокус). В точке бифуркации – центр. При λ > λ* исходный цикл неустойчив, рождается устойчивый инвариантный тор (в сечении – замкнутая кривая). Движение становится квазипериодическим.
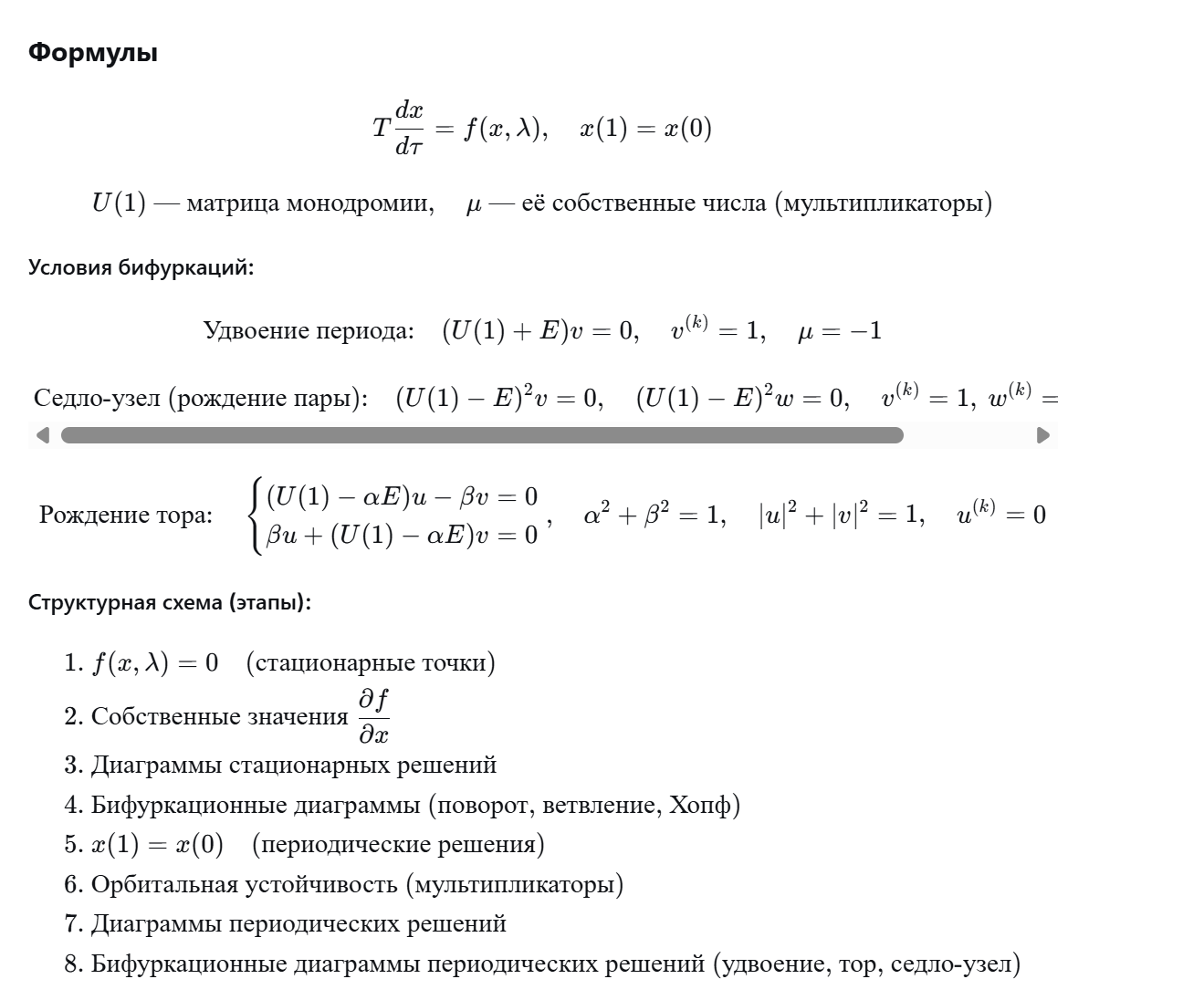
Построение бифуркационных диаграмм для периодических решений. Структурная схема анализа нелинейных моделей.
Текст (без формул)
Построение бифуркационных диаграмм периодических решений. Периодическое решение ищется как краевая задача x(1)=x(0) после замены τ=t/T. В процессе продолжения решения по параметру λ совместно интегрируются уравнения в вариациях для получения матрицы монодромии U(1). Для нахождения точек бифуркаций к системе добавляются дополнительные условия на мультипликаторы (собственные числа U(1)):
Удвоение периода (μ = –1): добавляется условие (U(1)+E)v = 0 с нормировкой v⁽ᵏ⁾=1.
Седло-узловая бифуркация периодических решений (μ = +1, вырожденный случай): (U(1)-E)²v = 0, (U(1)-E)²w = 0, с фиксацией компонент v и w.
Рождение инвариантного тора (Неймарк–Сакер): пара комплексно-сопряжённых мультипликаторов лежит на единичной окружности μ = α±iβ, α²+β²=1. Добавляются уравнения (U-αE)u – βv = 0, βu + (U-αE)v = 0, нормировка |u|²+|v|²=1 и фаза u⁽ᵏ⁾=0.
Если параметр λ двумерный (λ₁, λ₂), то, варьируя один из них с шагом, для каждого значения находят бифуркационное значение другого и строят бифуркационные кривые на плоскости параметров.
Структурная схема анализа нелинейных моделей (основные этапы):
Нахождение стационарных точек: f(x,λ)=0.
Анализ устойчивости стационарных точек (собственные значения матрицы Якоби).
Построение диаграмм стационарных решений (многократное решение п.1 при разных λ).
Построение бифуркационных диаграмм стационарных решений (п.1–3 с дополнительными уравнениями для бифуркаций: поворот, ветвление, Андронова-Хопфа).
Нахождение периодических решений (краевая задача x(1)=x(0)).
Анализ орбитальной устойчивости периодических решений (совместное решение п.5 и уравнений для матрицы монодромии).
Построение диаграмм периодических решений (многократное решение п.5).
Построение бифуркационных диаграмм периодических решений (п.5–7 с дополнительными уравнениями для удвоения периода, рождения пар, инвариантного тора).
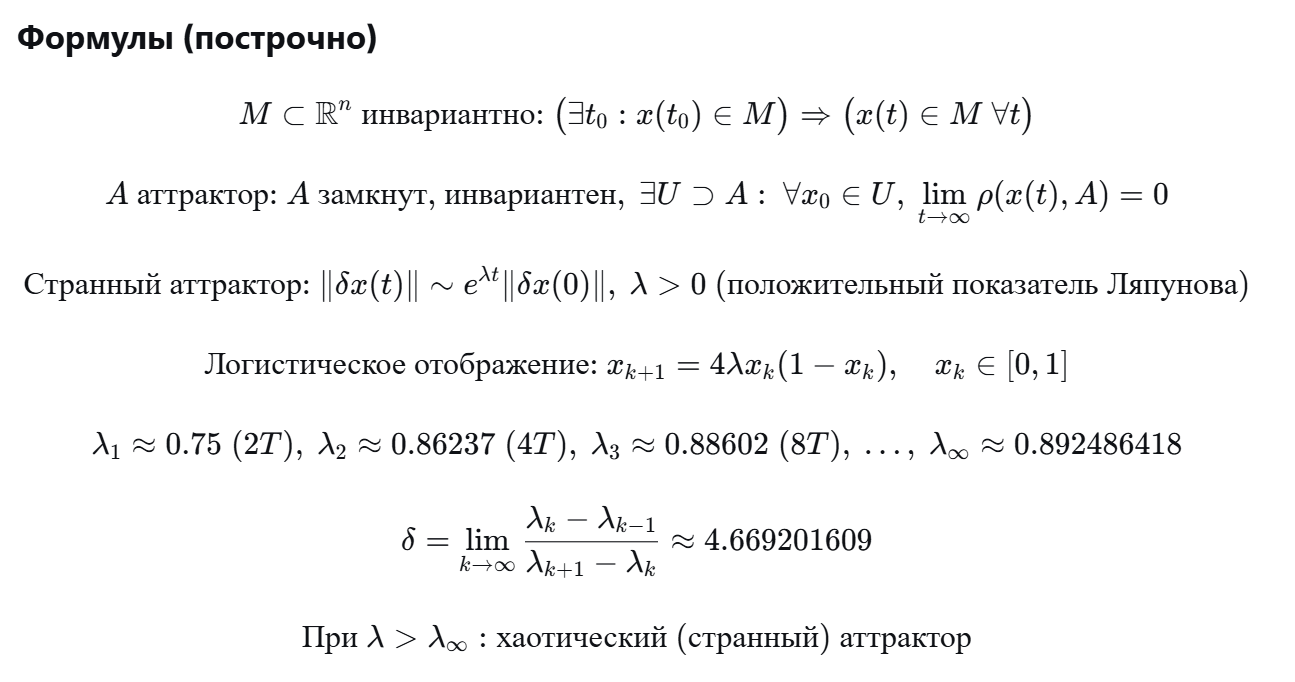
Понятие аттрактора. Странные аттракторы. Явление Фейгенбаума (субгармонический каскад)
Инвариантное множество M – множество точек в фазовом пространстве, такое что любая траектория, имеющая с M хотя бы одну общую точку, целиком лежит в M (при всех t). Иными словами, M состоит из целых траекторий.
Аттрактор A – замкнутое инвариантное множество, для которого существует открытое множество U (бассейн притяжения), содержащее A, и все траектории, начинающиеся в U, при t → ∞ стремятся к A (расстояние до A стремится к нулю).
Странный аттрактор – это аттрактор, обладающий внутренней неустойчивостью (хаосом): первоначально близкие траектории, лежащие в нём, разбегаются с экспоненциальной скоростью. При этом они остаются в ограниченной области. Странный аттрактор имеет фрактальную структуру и чувствительность к начальным условиям.
Явление Фейгенбаума (субгармонический каскад) – один из основных механизмов возникновения странного аттрактора. При изменении параметра λ происходит последовательность бифуркаций удвоения периода: устойчивый цикл периода T теряет устойчивость и рождается устойчивый цикл удвоенного периода 2T, затем 4T, 8T и так далее. Длины интервалов параметра, на которых существуют устойчивые циклы, уменьшаются в геометрической прогрессии. Предел отношения длин соседних интервалов – константа Фейгенбаума δ ≈ 4.669. Процесс накапливается в точке λ∞, после которой возникает хаотический (странный) аттрактор.
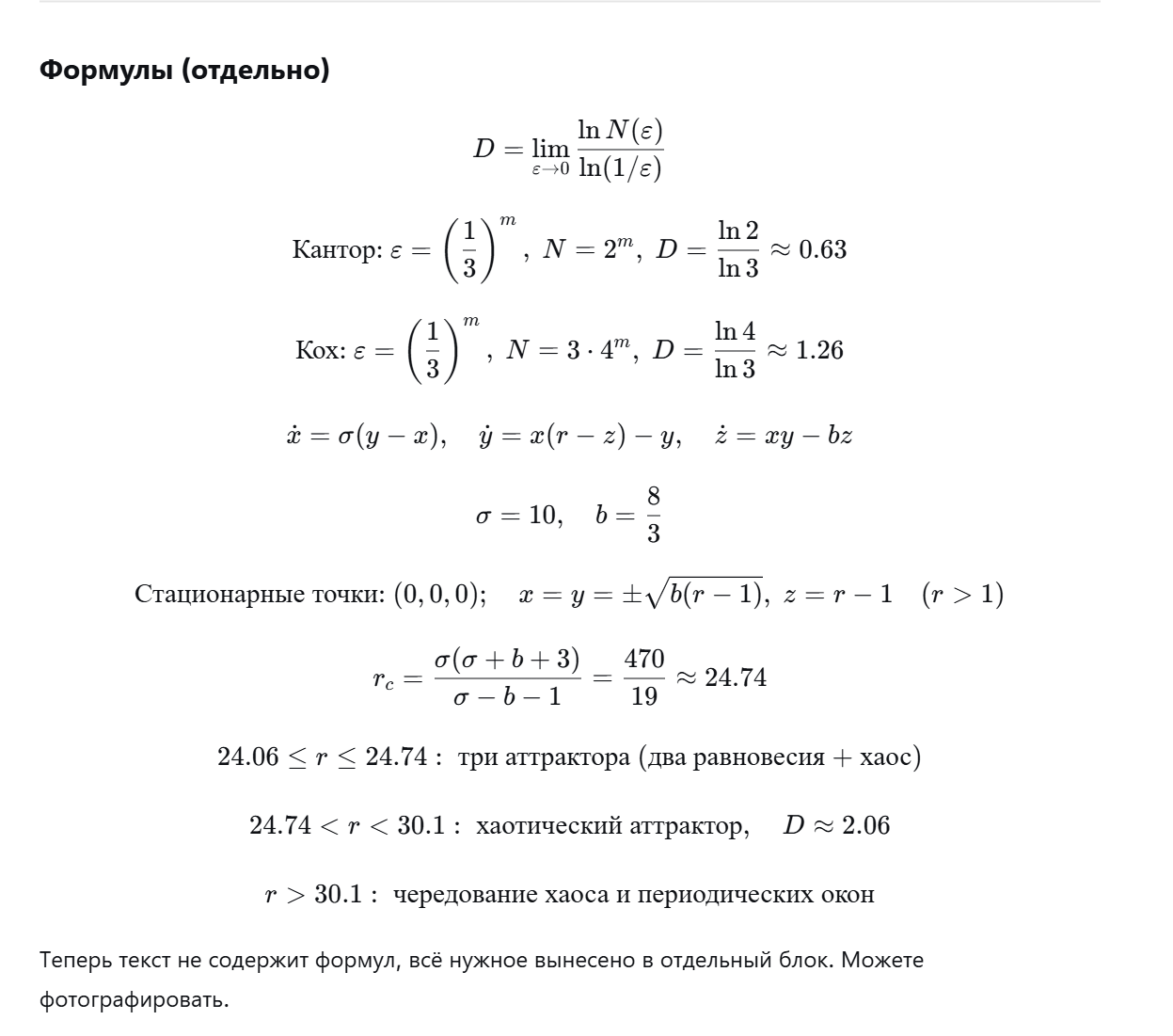
Фрактальные размерности. Аттрактор Лоренца.
Фрактальная размерность (размерность Хаусдорфа-Безиковича).
Обозначим через N(ε) наименьшее количество гиперкубов (ячеек) с ребром ε, необходимое для покрытия данного множества. Тогда фрактальная размерность D определяется как предел отношения логарифма N(ε) к логарифму (1/ε) при ε, стремящемся к нулю.
Для обычных объектов: точка имеет размерность 0, отрезок — 1, квадрат — 2.
Примеры фракталов:
Канторово множество строится последовательным удалением средней трети отрезков. Когда ε = (1/3)^m, требуется N = 2^m ячеек, поэтому D = ln 2 / ln 3 ≈ 0,63.
Кривая Коха («снежинка») получается заменой каждого отрезка на ломаную из четырёх звеньев, длина каждого звена в три раза меньше исходного. При ε = (1/3)^m, N = 3·4^m, размерность D = ln 4 / ln 3 ≈ 1,26.
Аттрактор Лоренца — классический пример странного аттрактора. Система уравнений моделирует конвекцию в слое жидкости.
Параметры обычно берут σ = 10, b = 8/3.
Стационарные точки:
Начало координат (0,0,0) — устойчиво при r < 1, при r > 1 теряет устойчивость.
При r > 1 появляются две симметричные точки с координатами x = y = ±√(b(r-1)), z = r-1.
Рождение хаоса происходит при критическом значении параметра r_c = σ(σ+b+3)/(σ-b-1). Для σ=10, b=8/3 это даёт r_c = 470/19 ≈ 24,74.
Поведение системы в зависимости от r:В интервале r от примерно 24,06 до 24,74 сосуществуют три аттрактора: два устойчивых равновесия и один хаотический.
При r между 24,74 и 30,1 существует только хаотический (странный) аттрактор с фрактальной размерностью около 2,06.
При r больше 30,1 наблюдаются чередования хаотических и периодических режимов (окна периодичности).
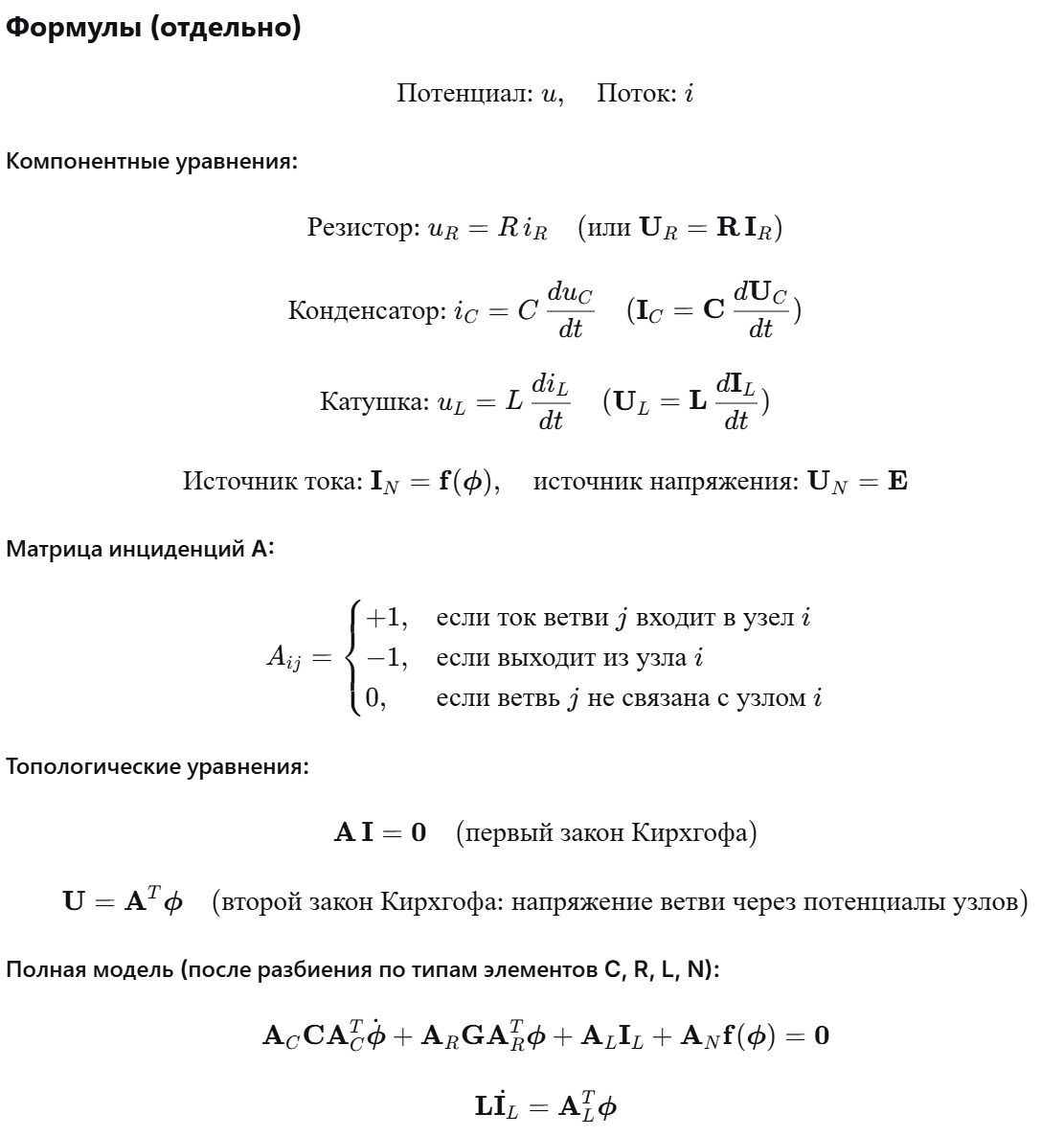
Компонентные и топологические уравнения на макроуровне.
Метод прямой аналогии основан на представлении динамической системы как совокупности физически однородных подсистем (элементов). Каждый элемент описывается двумя фазовыми переменными: потенциал (напряжение, сила, давление) и поток (ток, скорость, расход). Структура системы задаётся в виде графа: узлы — точки соединения элементов, ветви — сами элементы.
Компонентное уравнение — связь между потенциалом и потоком внутри одного элемента. Выделяют три типа пассивных элементов:
Резистивный (R): рассеяние энергии, связь мгновенная (без памяти): потенциал пропорционален потоку.
Ёмкостный (C): накопление потенциальной энергии: поток пропорционален скорости изменения потенциала.
Индуктивный (L): накопление кинетической энергии: потенциал пропорционален скорости изменения потока.
Активные элементы (источники) задаются как заданные функции потенциала или потока.
Топологические уравнения описывают связи между элементами:
Матрица инциденций A (строки — узлы, столбцы — ветви) задаёт ориентацию ветвей относительно узлов.
Первый закон Кирхгофа (для потоков): сумма потоков в каждом узле равна нулю.
Второй закон Кирхгофа (для потенциалов): разность потенциалов на ветви равна разности потенциалов соответствующих узлов.
Полная математическая модель получается объединением компонентных и топологических уравнений. Выражая токи и напряжения всех ветвей через узловые потенциалы и токи индуктивностей, получают систему дифференциально-алгебраических уравнений. В линейном случае она сводится к системе обыкновенных дифференциальных уравнений.
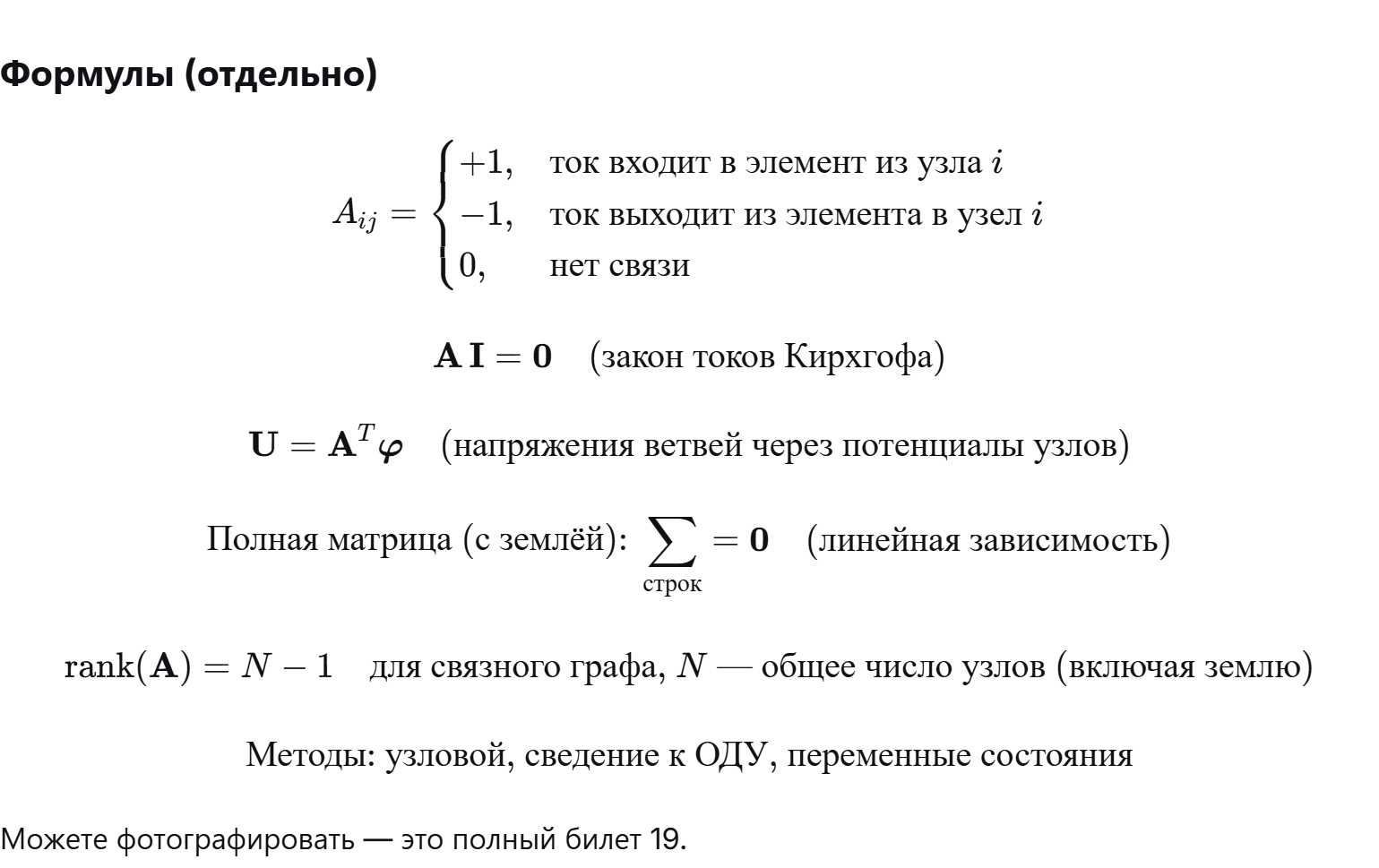
Автоматизация построения математического описания. Свойства матрицы инциденций
Матрица инциденций A — это таблица, описывающая связи между узлами и элементами (ветвями) в графе системы.
Строки соответствуют узлам (кроме базисного, «земли»).
Столбцы — элементам (ветвям).
Значения: плюс 1, если ток входит в элемент из данного узла; минус 1, если ток выходит из элемента в данный узел; 0, если узел не связан с элементом.
В каждом столбце не более двух ненулевых элементов (обычно один плюс 1 и один минус 1).
Построение (автоматизация):
Для каждого элемента ставят плюс 1 в строке узла, из которого ток выходит в элемент (входной узел), и минус 1 в строке узла, в который ток входит из элемента (выходной узел). Остальные строки — нули.
Свойства матрицы инциденций:
Закон токов Кирхгофа: сумма токов в каждом узле равна нулю.
Связь напряжений с потенциалами: напряжение на ветви равно разности потенциалов её узлов.
Линейная зависимость полной матрицы (включая землю): сумма всех строк равна нулю. Поэтому одну строку исключают, выбирая базисный узел с нулевым потенциалом.
Ранг матрицы: для связного графа ранг равен числу узлов минус 1 (где общее число узлов включает землю). Это число линейно независимых уравнений токов Кирхгофа.
Три метода построения модели на основе матрицы A:
Узловой метод (переменные — потенциалы узлов).
Метод сведения к ОДУ (дифференцирование алгебраических связей).
Метод переменных состояния (выбор независимых накопителей энергии).
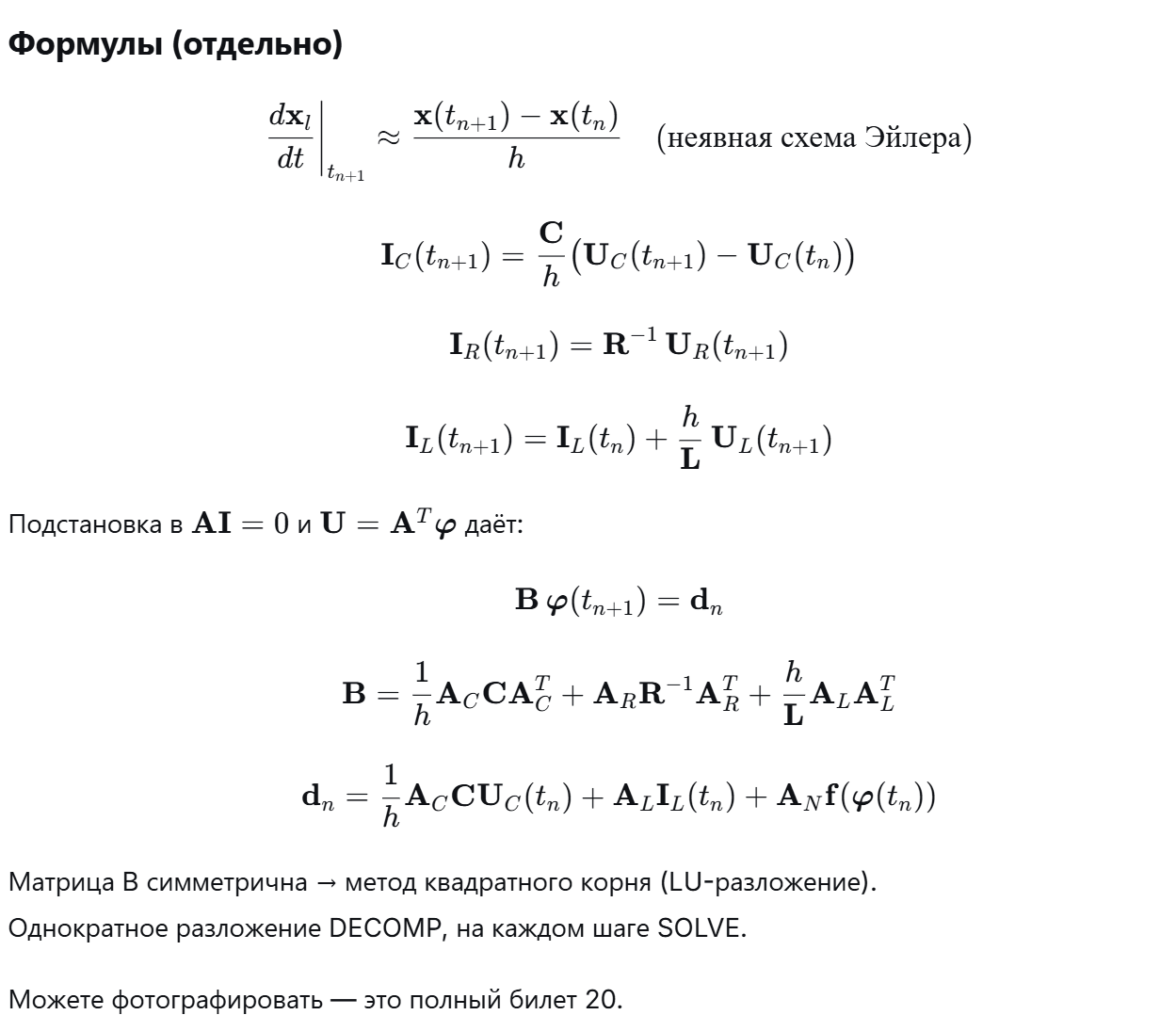
Узловой метод анализа. Сведение интегро-дифференциальных уравнений к разностным.
Узловой метод используется для численного моделирования динамических систем, собранных из элементов R, C, L, источников. Основная идея: заменить производные по времени их конечно-разностными аппроксимациями (неявная схема Эйлера). В результате для каждого момента времени t_{n+1} токи ёмкостей, резисторов и индуктивностей выражаются через напряжения на них в этот же момент и значения с предыдущего шага t_n. Затем эти выражения подставляются в закон токов Кирхгофа A·I = 0, а напряжения ветвей заменяются на разности узловых потенциалов (U = A^T·φ). Получается система линейных алгебраических уравнений относительно узловых потенциалов φ(t_{n+1}) на новом шаге.
Матрица системы B (симметричная, положительно определённая) вычисляется один раз для фиксированного шага h, затем на каждом шаге решается система B·φ = d_n, где правая часть d_n зависит от предыдущих значений напряжений на ёмкостях и токов индуктивностей, а также от нелинейных источников. Для решения используется LU-разложение (программы DECOMP/SOLVE).
Достоинства: простота реализации, возможность использовать готовые библиотеки линейной алгебры.
Недостатки: модель и метод не разделены (при изменении шага матрица пересчитывается заново); при малых шагах матрица становится плохо обусловленной.
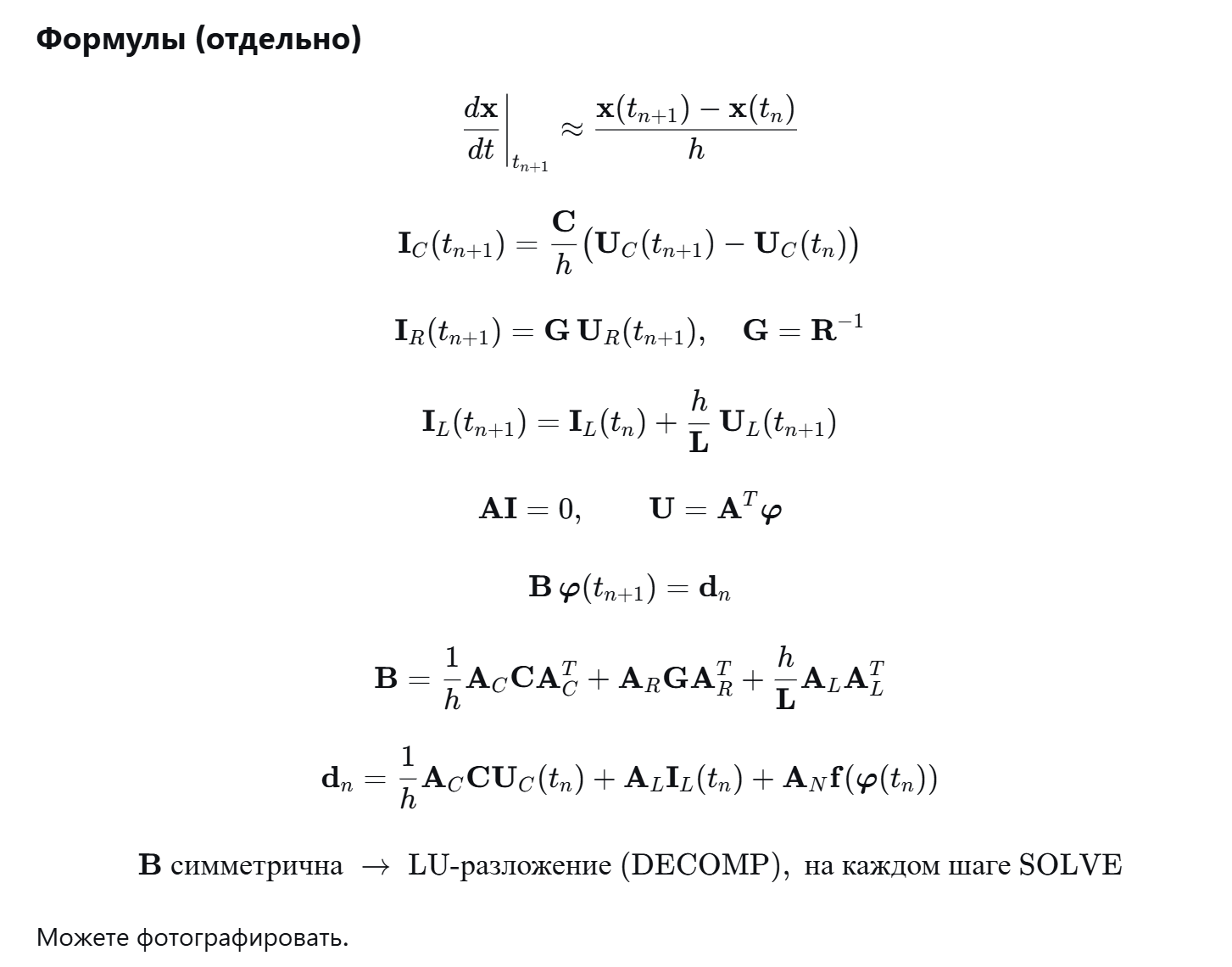
Узловой метод анализа. Сведение интегро-дифференциальных уравнений к разностным.
Узловой метод предназначен для численного моделирования динамических систем, собранных из элементов R (резисторы), C (конденсаторы), L (индуктивности) и источников.
Основная идея: заменить производные по времени приближёнными конечно-разностными соотношениями (неявная схема Эйлера).
В результате токи конденсаторов, резисторов и индуктивностей в момент tn+1tn+1 выражаются через напряжения на них в тот же момент и значения с предыдущего шага tntn.
Эти выражения подставляются в закон токов Кирхгофа AI=0AI=0. Напряжения ветвей выражаются через узловые потенциалы: U=ATφU=ATφ. Получается система линейных алгебраических уравнений для узловых потенциалов φ(tn+1)φ(tn+1):
B φ(tn+1)=dn.Bφ(tn+1)=dn.
Матрица BB симметричная, положительно определённая; вычисляется один раз для выбранного шага hh. Правая часть dndn пересчитывается на каждом шаге по значениям с предыдущего шага. Для решения используется LU-разложение (программы DECOMP и SOLVE).
Достоинства: простота, возможность использования готовых библиотек.
Недостатки: модель и метод не разделены; при малом hh матрица BB плохо обусловлена.
Анализ интегро-дифференциальных уравнений методом сведения к системе обыкновенных дифференциальных уравнений. Недостатки этого подхода.
Текст (без формул)
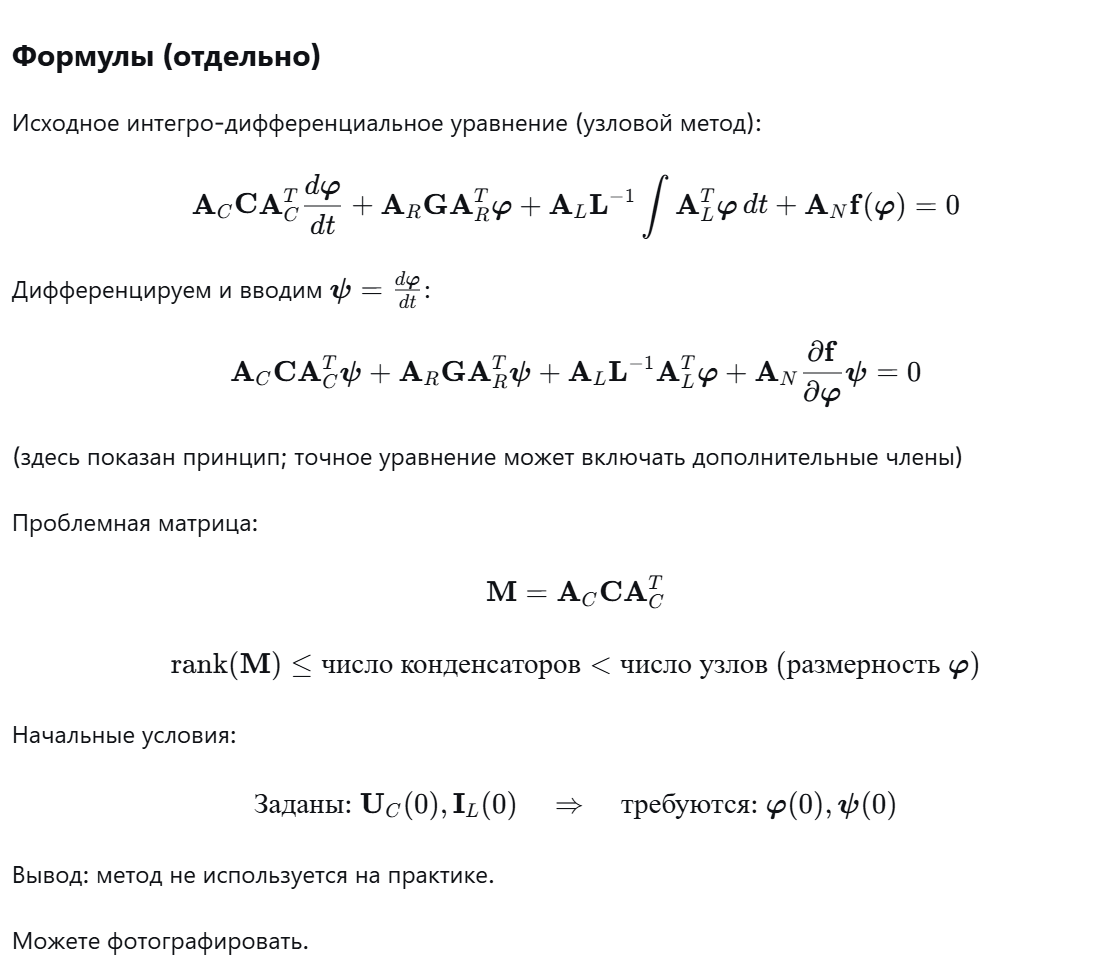
Исходное уравнение получается подстановкой компонентных уравнений элементов R, C, L, источников и топологических соотношений в закон токов Кирхгофа для узлов. В нём есть производная от потенциалов (токи конденсаторов) и интеграл от потенциалов (токи индуктивностей). Чтобы избавиться от интеграла, уравнение дифференцируют по времени и вводят новую переменную ψ – производную узловых потенциалов. Цель – получить систему обыкновенных дифференциальных уравнений (ОДУ) в форме, пригодной для стандартных программ (например, Рунге-Кутты).
Недостаток 1 (вырожденность).
После дифференцирования перед ψ оказывается матрица M = A_C·C·A_C^T. Эта матрица имеет неполный ранг, потому что число узлов обычно больше числа конденсаторов. Ранг A_C не превышает количества конденсаторов, а значит M – вырожденная (особенная). Из-за этого систему нельзя разрешить относительно производной ψ – она не приведена к нормальной форме ОДУ. Теоретически можно преобразовать уравнения, выделив алгебраические связи, но для больших схем такая редукция крайне сложна для автоматизации.
Недостаток 2 (начальные условия).
В стандартной постановке задачи начальные условия заданы естественно: напряжения на конденсаторах U_C(0) и токи в индуктивностях I_L(0). Однако полученная система требует начальных значений узловых потенциалов φ(0) и их производных ψ(0). Пересчитать U_C(0) и I_L(0) в φ(0) и ψ(0) для схем большой размерности часто невозможно или требует решения дополнительных сложных задач.
Из-за этих недостатков метод сведения к ОДУ практически не используется в автоматизированном построении моделей.
Некоторые сведения из теории графов. Метод переменных состояния. Понятие топологического вырождения.
Основные понятия теории графов
Граф — множество вершин (узлов) и рёбер (ветвей).
Связный граф — между любыми двумя вершинами есть путь.
Подграф — часть вершин и связывающих их рёбер.
Цикл (контур) — замкнутая цепь, начинающаяся и заканчивающаяся в одной вершине.
Фундаментальное (покрывающее) дерево — подграф без циклов, содержащий все узлы.
Ветви — рёбра дерева (N–1 шт., где N — число узлов).
Хорды — остальные рёбра.
Контур хорды — единственный цикл, возникающий при добавлении хорды к дереву.
Сечение ветви — замкнутая линия, пересекающая ровно одну ветвь и все другие рёбра по одному разу.
Нормальное дерево
Строится по иерархии: E → C → R → L → I
E (источники напряжения) — включаем все возможные без циклов.
C (ёмкости) — включаем максимально возможное число.
R (резисторы) — добавляем при необходимости.
L (индуктивности) — только в крайнем случае.
I (источники тока) — никогда не включаются в дерево.
Матрица контуров и сечений M
Строки — хорды (S, R, L, I).
Столбцы — ветви (E, C, r, Γ).
Элементы:
+1 — направление ветви совпадает с обходом контура хорды;
−1 — противоположное;
0 — ветвь не входит в контур.
Топологические уравнения:
UX = MUB (закон напряжений Кирхгофа для хорд)
UX = MUB (закон напряжений Кирхгофа для хорд)
IB = −MTIX(закон токов Кирхгофа для ветвей)
IB = −MTIX(закон токов Кирхгофа для ветвей)
Топологическое вырождение
Матрица M разбивается на блоки по типам элементов.
Три блока всегда нулевые (свойство нормального дерева):
MSr=0,MSΓ=0,MRΓ=0MSr=0,MSΓ=0,MRΓ=0
Отсутствие топологических вырождений — дополнительно выполняются:
MSE=0,MSC=0,MRr=0,MLΓ=0,MLI=0MSE=0,MSC=0,MRr=0,MLΓ=0,MLI=0
Если какой-то из этих блоков ненулевой — вырождение:
MSE≠0MSE=0 — контур из одних источников напряжения.
MSC≠0MSC=0 — контур из источников напряжения и ёмкостей.
MRr≠0MRr=0 — контур из одних резисторов.
MLΓ≠0MLΓ=0 — контур из одних индуктивностей.
MLI≠0MLI=0 — контур из индуктивностей и источников тока.
Метод переменных состояния
Автоматизированный алгоритм получения нормальной системы ОДУ:
Построить нормальное дерево.
Составить матрицу M.
Записать топологические уравнения.
Подставить компонентные уравнения (R, C, L, источники).
При отсутствии вырождений исключить алгебраические переменные, получив:
x˙=Ax+Bu,
x=[UC; IL].
x˙=Ax+Bu,
x=[UC; IL].
![<p>Основные понятия теории графов</p><ul><li><p class="ds-markdown-paragraph"><strong>Граф</strong> — множество вершин (узлов) и рёбер (ветвей).</p></li><li><p class="ds-markdown-paragraph"><strong>Связный граф</strong> — между любыми двумя вершинами есть путь.</p></li><li><p class="ds-markdown-paragraph"><strong>Подграф</strong> — часть вершин и связывающих их рёбер.</p></li><li><p class="ds-markdown-paragraph"><strong>Цикл (контур)</strong> — замкнутая цепь, начинающаяся и заканчивающаяся в одной вершине.</p></li><li><p class="ds-markdown-paragraph"><strong>Фундаментальное (покрывающее) дерево</strong> — подграф без циклов, содержащий все узлы.</p></li><li><p class="ds-markdown-paragraph"><strong>Ветви</strong> — рёбра дерева (N–1 шт., где N — число узлов).</p></li><li><p class="ds-markdown-paragraph"><strong>Хорды</strong> — остальные рёбра.</p></li><li><p class="ds-markdown-paragraph"><strong>Контур хорды</strong> — единственный цикл, возникающий при добавлении хорды к дереву.</p></li><li><p class="ds-markdown-paragraph"><strong>Сечение ветви</strong> — замкнутая линия, пересекающая ровно одну ветвь и все другие рёбра по одному разу.</p></li></ul><p>Нормальное дерево</p><p class="ds-markdown-paragraph">Строится по иерархии: <strong>E → C → R → L → I</strong></p><ul><li><p class="ds-markdown-paragraph"><strong>E</strong> (источники напряжения) — включаем все возможные без циклов.</p></li><li><p class="ds-markdown-paragraph"><strong>C</strong> (ёмкости) — включаем максимально возможное число.</p></li><li><p class="ds-markdown-paragraph"><strong>R</strong> (резисторы) — добавляем при необходимости.</p></li><li><p class="ds-markdown-paragraph"><strong>L</strong> (индуктивности) — только в крайнем случае.</p></li><li><p class="ds-markdown-paragraph"><strong>I</strong> (источники тока) — никогда не включаются в дерево.</p></li></ul><p>Матрица контуров и сечений M</p><ul><li><p class="ds-markdown-paragraph">Строки — хорды (S, R, L, I).</p></li><li><p class="ds-markdown-paragraph">Столбцы — ветви (E, C, r, Γ).</p></li><li><p class="ds-markdown-paragraph">Элементы:<br>+1 — направление ветви совпадает с обходом контура хорды;<br>−1 — противоположное;<br>0 — ветвь не входит в контур.</p></li></ul><p class="ds-markdown-paragraph"><strong>Топологические уравнения:</strong></p><p>UX = MUB (закон напряжений Кирхгофа для хорд)<br>UX = MUB (закон напряжений Кирхгофа для хорд)<br>IB = −MTIX(закон токов Кирхгофа для ветвей)<br>IB = −MTIX(закон токов Кирхгофа для ветвей)<br><br>Топологическое вырождение</p><p class="ds-markdown-paragraph">Матрица M разбивается на блоки по типам элементов.<br>Три блока всегда нулевые (свойство нормального дерева):</p><p>MSr=0,MSΓ=0,MRΓ=0MSr=0,MSΓ=0,MRΓ=0</p><p class="ds-markdown-paragraph"><strong>Отсутствие топологических вырождений</strong> — дополнительно выполняются:</p><p>MSE=0,MSC=0,MRr=0,MLΓ=0,MLI=0MSE=0,MSC=0,MRr=0,MLΓ=0,MLI=0</p><p class="ds-markdown-paragraph">Если какой-то из этих блоков ненулевой — вырождение:</p><ul><li><p class="ds-markdown-paragraph"><span style="font-family: KaTeX_Main, "Times New Roman", serif; line-height: 1.2; font-size: 1.21em;">MSE≠0<strong>M</strong><em>SE</em>=0</span> — контур из одних источников напряжения.</p></li><li><p class="ds-markdown-paragraph"><span style="font-family: KaTeX_Main, "Times New Roman", serif; line-height: 1.2; font-size: 1.21em;">MSC≠0<strong>M</strong><em>SC</em>=0</span> — контур из источников напряжения и ёмкостей.</p></li><li><p class="ds-markdown-paragraph"><span style="font-family: KaTeX_Main, "Times New Roman", serif; line-height: 1.2; font-size: 1.21em;">MRr≠0<strong>M</strong><em>Rr</em>=0</span> — контур из одних резисторов.</p></li><li><p class="ds-markdown-paragraph"><span style="font-family: KaTeX_Main, "Times New Roman", serif; line-height: 1.2; font-size: 1.21em;">MLΓ≠0<strong>M</strong><em>L</em>Γ=0</span> — контур из одних индуктивностей.</p></li><li><p class="ds-markdown-paragraph"><span style="font-family: KaTeX_Main, "Times New Roman", serif; line-height: 1.2; font-size: 1.21em;">MLI≠0<strong>M</strong><em>LI</em>=0</span> — контур из индуктивностей и источников тока.</p></li></ul><p>Метод переменных состояния</p><p class="ds-markdown-paragraph">Автоматизированный алгоритм получения нормальной системы ОДУ:</p><ol><li><p class="ds-markdown-paragraph">Построить нормальное дерево.</p></li><li><p class="ds-markdown-paragraph">Составить матрицу M.</p></li><li><p class="ds-markdown-paragraph">Записать топологические уравнения.</p></li><li><p class="ds-markdown-paragraph">Подставить компонентные уравнения (R, C, L, источники).</p></li><li><p class="ds-markdown-paragraph">При отсутствии вырождений исключить алгебраические переменные, получив:</p></li></ol><p>x˙=Ax+Bu,<br>x=[UC; IL].<br>x˙=Ax+Bu,<br>x=[UC; IL].<br></p>](https://assets.knowt.com/user-attachments/cf6d06e3-18d6-450a-b07f-159357466ec4.png)
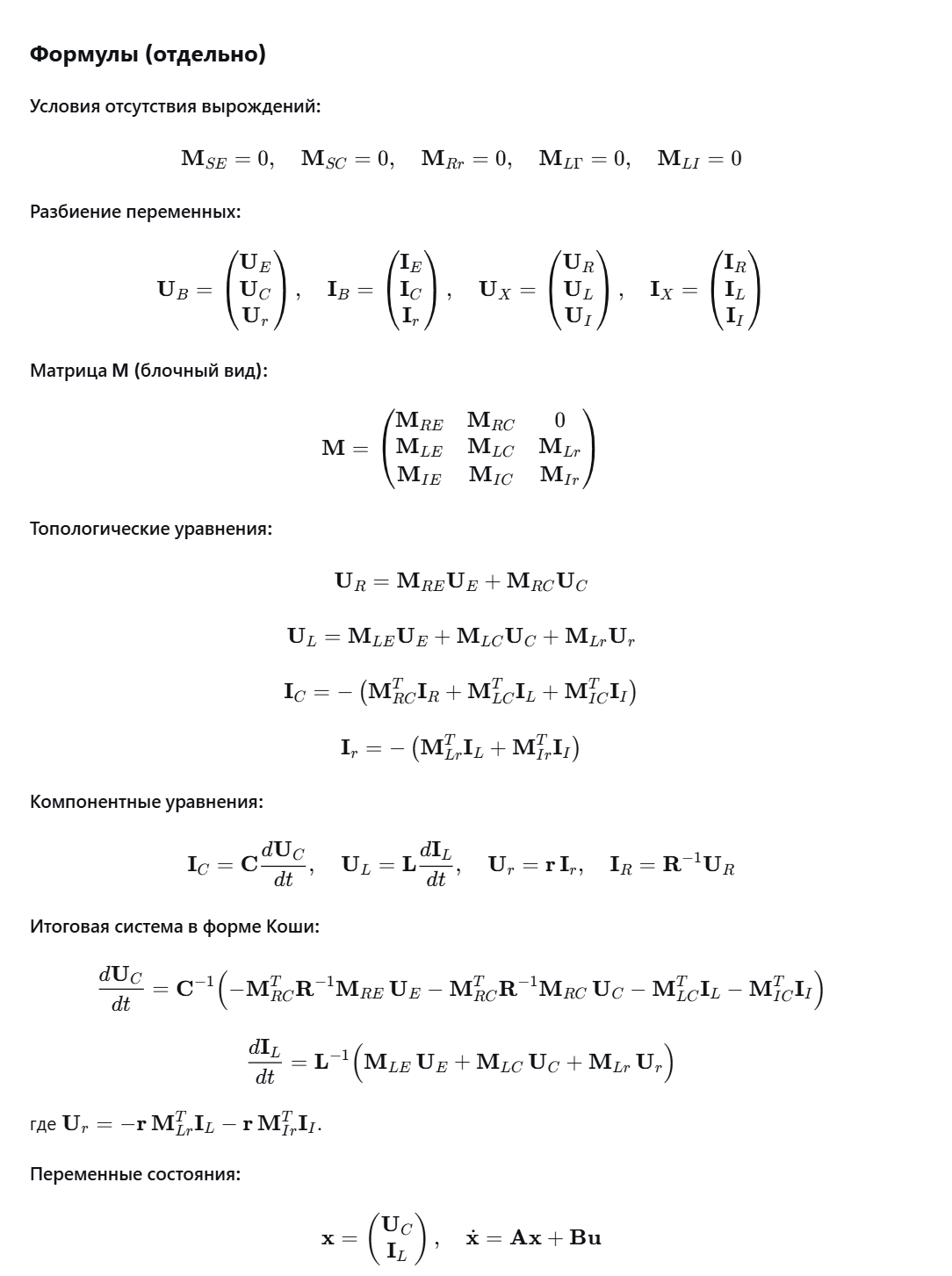
Метод переменных состояния без топологических вырождений.
Условие: в схеме отсутствуют топологические вырождения – пять специальных блоков матрицы М равны нулю. Это означает, что нет запрещённых контуров (из одних источников напряжения, из источников и ёмкостей, из одних резисторов, из одних индуктивностей, из индуктивностей и источников тока).
В такой ситуации нормальное дерево содержит только:
E – источники напряжения (все),
C – ёмкости (все),
r – резисторы, попавшие в дерево.
Хордами становятся:
R – резисторы, не вошедшие в дерево,
L – все индуктивности (они всегда хорды),
I – источники тока (всегда хорды).
Матрица М (строки – хорды, столбцы – ветви) имеет ненулевые блоки только для связей R–E, R–C, L–E, L–C, L–r, I–E, I–C, I–r. Остальные блоки – нулевые.
Топологические уравнения (законы Кирхгофа) позволяют выразить:
напряжения на хордах (U_R, U_L, U_I) через напряжения на ветвях (U_E, U_C, U_r),
токи ветвей (I_E, I_C, I_r) через токи хорд (I_R, I_L, I_I).
После подстановки компонентных уравнений элементов:
для ёмкостей: I_C = C·dU_C/dt,
для индуктивностей: U_L = L·dI_L/dt,
для резисторов: U_R = R·I_R, U_r = r·I_r,
получаем систему обыкновенных дифференциальных уравнений в форме Коши (разрешённую относительно производных).
Переменные состояния – напряжения на ёмкостях U_C (ветви) и токи в индуктивностях I_L (хорды).
Правые части уравнений выражаются явно через сами переменные состояния, входные воздействия (U_E, I_I) и постоянные матрицы. Никаких дополнительных алгебраических уравнений решать не нужно – это главное преимущество метода.
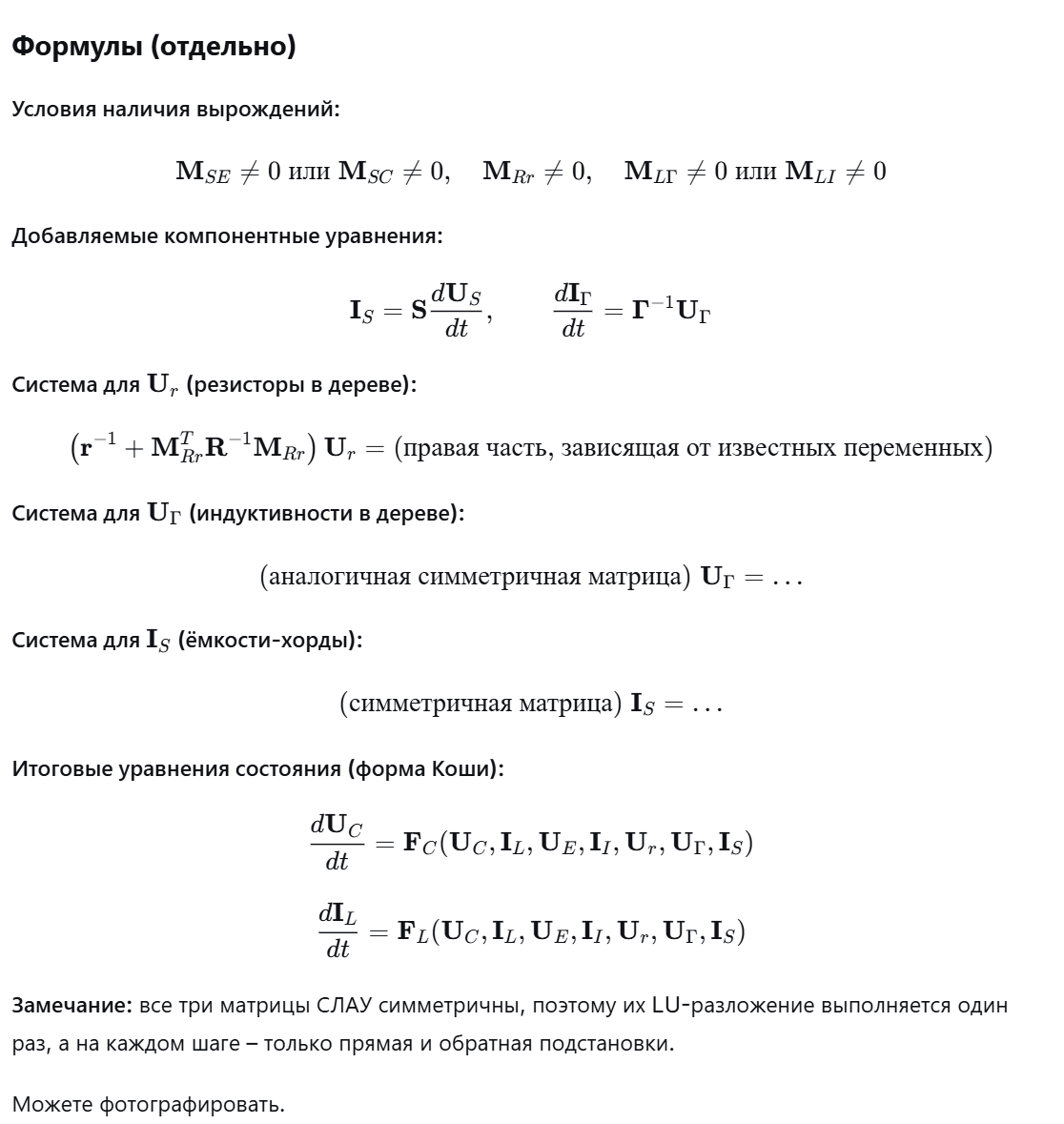
Метод переменных состояния при наличии топологических вырождений.
Условия: в схеме есть топологические вырождения – некоторые из пяти блоков матрицы М не равны нулю. Конкретно:
MSE≠0MSE=0 или MSC≠0MSC=0 – контуры из источников напряжения и ёмкостей;
MRr≠0MRr=0 – контуры из одних резисторов;
MLΓ≠0MLΓ=0 или MLI≠0MLI=0 – контуры из индуктивностей и источников тока.
Что меняется: теперь в дереве могут оказаться не все ёмкости (часть становятся хордами – обозначим их токи ISIS), а некоторые индуктивности попадают в дерево (обозначим их напряжения UΓUΓ). Для них добавляются компонентные уравнения:
для хордной ёмкости SS: IS=SdUSdtIS=SdtdUS (но USUS – напряжение на хордной ёмкости, определяется через потенциалы);
для ветвевой индуктивности ΓΓ: dIΓdt=Γ−1UΓdtdIΓ=Γ−1UΓ.
Проблема: теперь правые части уравнений для основных переменных состояния (напряжений на ёмкостях в дереве UCUC и токов в индуктивностях-хордах ILIL) содержат дополнительные неизвестные:
UrUr – напряжения на резисторах в дереве,
UΓUΓ – напряжения на индуктивностях в дереве,
ISIS – токи через ёмкости-хорды.
Эти величины не являются переменными состояния и не могут быть выражены явно. Поэтому на каждом шаге интегрирования их нужно находить, решая системы линейных алгебраических уравнений (СЛАУ). Таких систем три:
Для UrUr: из уравнений контуров, содержащих только резисторы (блок MRrMRr). Матрица системы: r−1+MRrTR−1MRrr−1+MRrTR−1MRr. Она симметрична, поэтому LU-разложение выполняется один раз, а на каждом шаге решается только подстановка.
Для UΓUΓ: из уравнений контуров, содержащих индуктивности (ветвевые). Матрица также симметрична.
Для ISIS: из уравнений сечений, содержащих ёмкости-хорды. Матрица симметрична.
После решения этих трёх систем все неизвестные становятся известными, и правая часть основных уравнений Коши для UCUC и ILIL вычисляется явно.
Итог: система в форме Коши относительно UCUC и ILIL сохраняется, но вычисление правой части теперь требует решения трёх вспомогательных СЛАУ на каждом шаге. Благодаря симметрии матриц, для них можно использовать эффективные методы (например, метод квадратного корня или LU-разложение с однократным разложением).
Автоматизация составления уравнений состояния. Алгоритмы "склеивания вершин" и "обрезания хвостов
Для автоматизации метода переменных состояния необходимо разделить все двухполюсники на ветви и хорды и построить матрицу (этапы 1–2). Это выполняется следующими алгоритмами.
Алгоритм «склеивания вершин». Применяется для назначения ветвей в соответствии с иерархией нормального дерева. На каждом шаге выбирается двухполюсник в соответствии с иерархией ( – первыми, затем , , , – последними). Если его включение в дерево не создаёт цикла (т.е. два конца двухполюсника принадлежат разным подграфам), то он назначается ветвью и соответствующие вершины «склеиваются» (объединяются в одну). Иначе – двухполюсник становится хордой.
Алгоритм «обрезания хвостов». Применяется для определения нормального дерева в качестве альтернативы. «Хвост» – ветвь, подключённая к дереву только с одной стороны (висячая вершина). Алгоритм последовательно «обрезает» хвосты нижнего приоритета () до тех пор, пока граф не станет деревом, покрывающим все вершины.
Результатом обоих алгоритмов является нормальное дерево и разбиение всех двухполюсников на ветви и хорды, по которому строится матрица (этап 2), а затем составляются уравнения состояния (этап 3).