Avd Control 1-8
1/35
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai | Chat |
|---|
No analytics yet
Send a link to your students to track their progress
36 Terms
Define the terms Known Knows, Known Unknowns, and Unknown Unknowns, and then apply them to context of a control system (Cruise Control).
Known Knowns: Variables of the system from sensors or actuators
Known Unknowns: Uncertainties that we are aware of
Unknown Unknowns: Uncertanties that we have not anticipated
Cruise Control
KK: We know from the sensor the speed of the system, desired speed set by driver.
KU: These are typically derived from the enviroment, ie road conditions, incline decline, road surface.
UU: Typically none as this is a relatively simple system, however may be partial engine damage which is affecting controller.
Provide a brief description of three elements of the test plan that need to be considered, before you should undertake any testing.
Coverage of all elements to be tested You should check that the plan includes every relevant part of the prototype/control system, so nothing important is left untested.
Coverage of the full specification The tests should show whether the system meets the full specification, not just whether it works in one or two cases.
Suitability of the test scenarios (or test equipment) The slides say you must consider whether the test scenarios are suitable, and also whether the test equipment is suitable. In other words, the planned tests and the equipment used must be appropriate for assessing the controller properly.
Define a suitable design process that a control system should follow.
Establish control goals
Identify the variables to control
Write the specifications for the variables.
Establish the system configuration and identify the actuator
Obtain a model of the process, the actuator, and the sensor
Describe a controller and select key parameters to be adjusted
Optimise the parameters and analyse the performance
If performance does not need specifications, reconfigure and redesign (step 4).
Define verification, describe why it is important and what steps should be involved in the verification process.
The process ensuring that the simulation model is an accurate representation of the physical equations that represent the dynamics of the system being modelled.
It is important as it checks that the model has been implemented correctly and actually matches the intended system equations. If the model is wrong, controller designed or tested may behave incorrectly on the real system.
Inspection: Checks each stage of your model and ensures that the system is represented correctly in each line of your model. Each line of your model should reflect something about the real system. This stage can catch basic errors.
Demonstration: Your model should be written in such away that your can test elements of it as you go. At this stage you are able to put in known stimulus that should generate a known output. This demonstrates that your model can work and provides a sanity check on the logic and basic operation of your model. This is different from test as during testing you apply a wide range of test stimulus and you are looking to test the system.
Test: The first stage is to identify a series of suitable test scenarios that you know what the output should be. These tests should be clear and there should be no ambiguity in the output to ensure that the results are what you expect. The tests should prove that the controlled system meets the requirements set down within the original remit.
Define validation.
The process of ensuring that the simulated output response from the model is an accurate representation of the output response from the actual system.
Provide an overview of the process that is normally followed to achieve validation
Ensure that the model has been verified…
Define acceptable tolerances between the model and the actual system output.
Carry out a method of validation for example analogue matching, with the same input stimuli and compare output.
If output is not within specified tolerance, make changes to the model parameters and repeat until the specified tolerance is met.
Provide a reason why validation is important in the development of control systems.
Validation is important because it confirms that the developed model and resulting controller are accurate enough for the real system. This is necessary so that predicted performance, stability and robustness are reliable; otherwise the implemented controller may not behave as expected on the real plant.
Describe the concept of Analogue matching with a sketch.
Analogue matching is a comparison done visually of the actual and simulated response for the same input stimuli. Differences between the responses can be assessed and changed to the model parameters made. This is repeated until the system is within the required tolerances, a best fit is achieved. As its done visually this requires expertise.
Describe the concept Least Mean Squares (Validation).
A method that can be used in conjunction with analogue matching is least mean squares. It is a quantitative measure of the models accuracy by calculating the sum of errors squared. This provides a measure of the error over the complete test and can provide additional insight to the comparison.
Describe the concept of Parameter Estimation.
Model parameters are adjusted and outputs of the simulated and real systems are compared via a cost function. The model parameters are adjusted to allow the cost functions used to tend toward zero. Process is carried out automatically.
When simulating control systems, why should you include ‘real’ models of the sensors and actuators? Provide three concepts of what can be added to the model to replicate the real world.
The control systems developed in simulation need to be ready for the real world. This means that the system needs to be tested with models that are representative of both the sensors and actuators. The sensors and actuators in the real world will not be ideal, as is often the case with modelled devices.
Sensor noise: Random fluctuations added to the measured signal, so the controller does not see the true value exactly. which can reduce tracking accuraucy.
Bias drift: A slowly changing offset in the measurement over time. Controller may gradually respond to a false trend over time.
Actuator limit: Actuators can not respond infinitely fast (speed) or produce unlimited output.
Why is it important to understand the sensors and actuators being used?
Sensors:
It is important to understand the sensors and actuators because they determine what the controller can measure, how accurately it can react, and what physical action it can actually apply to the system. The following needs to be known about sensors and actuators:
Measurement accuracy of sensors - if the sensor is inaccurate, the controller is working from the wrong information, so the output can be incorrect even if the control law is good.
Sensor range and resolution - The designer must know the minimum and maximum measurable values, and how small a change the sensor can detect. Otherwise important changes in the system may be missed or clipped.
Sensor noise and disturbances - Real sensors contain noise, so the controller may react to unwanted fluctuations rather than the true system behaviour. This affects stability and output quality.
Sensor and actuator dynamics / response speed: Sensors and actuators do not respond instantaneously. Delays and slow response can make the system sluggish, oscillatory, or even unstable if not accounted for.
Actuator limits and saturation: Actuators can only provide a limited force, torque, voltage, flow rate, etc. If the controller demands more than the actuator can deliver, performance degrades and the design assumptions become invalid.
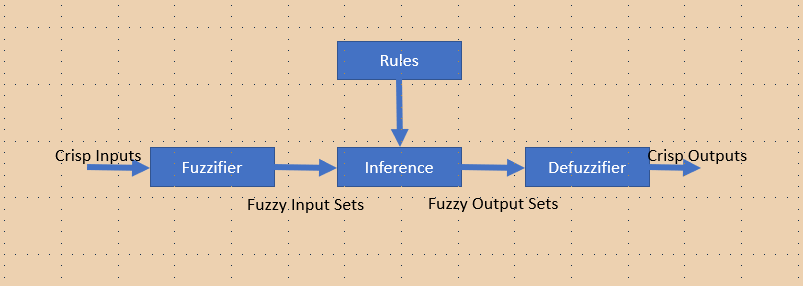
Provide the standard model for a Fuzzy logic system with an explanation for each stage.
Fuzzifier: Maps crisp numbers into fuzzy sets. Takes the precision and creates tolerances.
Inference: Maps the input fuzzy sets into the output fuzzy sets. Controls the combination of rules.
Defuzzifier: Takes the output fuzzy set and transforms into a crisp number. Systems normally have outputs that require a defined number.
Rules: Provided by experts of the system to be controlled. Gained from suitable verification and validation of the system. Established through testing and specifications. IF / THEN statements to link rules to inputs/outputs.
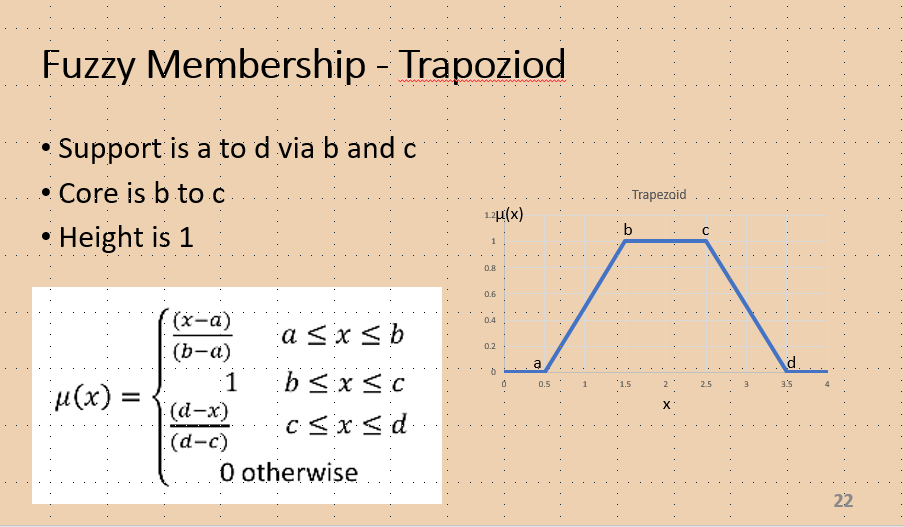
Provide a mathematical description of the trapezoid fuzzy membership function.
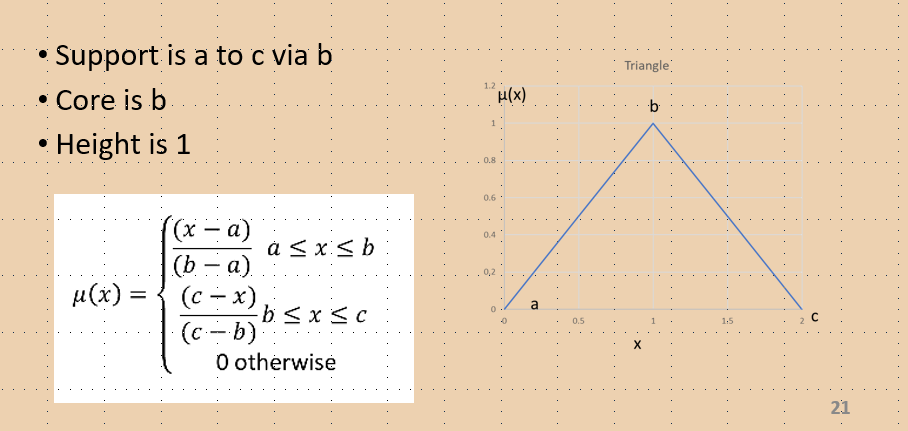
Provide a mathematical description of the triangular fuzzy membership function.
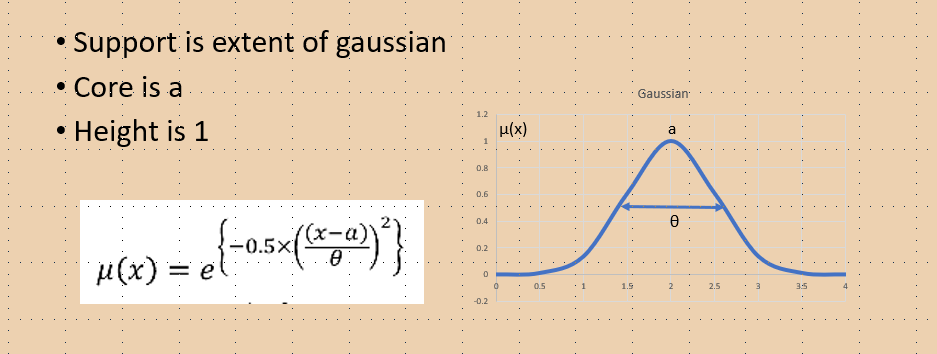
Provide a mathematical description of the gaussian fuzzy membership function.
Give reasons and example of use for all fuzzification methods.
Triangular: Used when a variable has a clear central condition and then gradually becomes less representative on either side. In a car speed controller, the term “medium speed” can be triangular. For example, around one central speed the vehicle is clearly at medium speed, but as speed moves lower or higher it becomes less medium and more low or high. So triangular is suitable where there is one most representative value for a linguistic term.
Used when a variable has a whole acceptable operating band that should all be treated equally as belonging to one category. In a room heating or air-conditioning controller, the term “comfortable temperature” is often trapezoidal. For example, a range such as 20–23°C may all be fully comfortable, not just one exact temperature.
So trapezoidal is suitable where there is a flat region of equally valid values.
Used when the variable changes in a smooth natural way and there are no sharp boundaries between categories. It is also suitable in robot steering, where angle error changes continuously and smoothly.
So Gaussian is used where the transition between states is naturally gradual and physical behaviour is smooth.
Used when the input is best treated as a specific exact condition rather than a broad range (ie no tolerance). This would be used if the user is looking for an exact value and no tolerance.
List all the defuzzification methods.
Smallest of maximum (SOM): The SOM is the lowest crisp value associated with the range,
Largest of Maximum (LOM): The LOM is the highest crisp value associated with the range.
Mean of Maxima (MOM): The MOM is the average crisp value associated with the range. This can become incorrect if there are two or more seperate peaks with the same maximum membership value.
Centroid: The centroid method calculates the average over the complete range of possible outputs (takes into account what MOM does not). This is a common method but may provide difficulties in calculation.
What membership functions should be used to allow for gentle change and a rapid change.
Wide trapezoidal functions give a gradual change, narrow triangular functions would be used for a more rapid change.
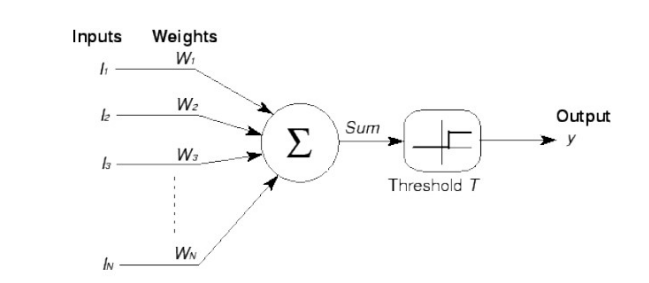
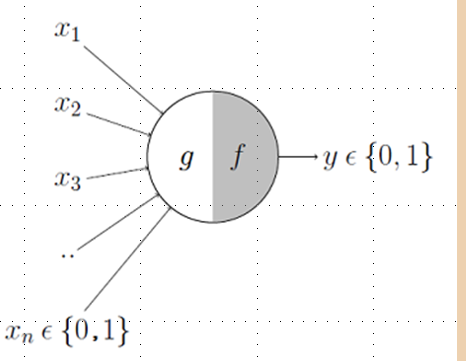
Describe, with a diagram, a perceptron and explain why this is the preferred building block for a Neural Networks.
A perceptron is an approximation of the brain neuron. Nerves transmit the signals which the neurons sum and and output an appropriate signal. The function is a threshold that allows the neuron to fire or not.
The weights provide a means of learning and this is why it is the preferred building block. A neural network built from perceptrons.
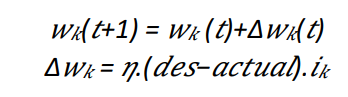
Given the perceptron learning rule: Provide a definition for each parameter
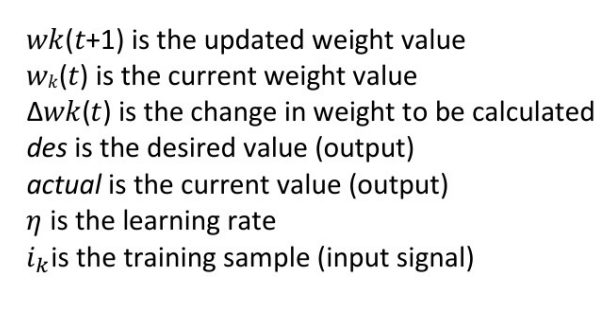
Describe with a diagram the mcculloch pits neuron.
A mcculloch pits neuron sums inputs and applies a threshold to decide 0 or 1. Its limitations are that inputs are usually on or off, and has no weights hence no ability to learn.
What is the expected impact on the learning as you increase/decrease the learning rate and why might this be undesirable?
Increase: As the learning rate increases, the perceptron changes its weights more quickly in response to the input error, so learning is faster. This can be undesirable because the network may change too much based on current errors, so it can forget previous weight settings quickly and fail to settle to a stable solution.
Decrease: As the learning rate decreases, the perceptron changes its weights more slowly, so learning is more gradual. This can be undesirable because the network may adapt too slowly to new input data and take a long time to learn the correct classification.
Why does a neural network need to be trained?
A neural network needs to be trained as its starting weights do not automatically give the correct output. For a perceptron, training adjusts the weights and biases/threshold so the decision boundary moves until outputs are classified correctly.
Provide two ways in which Machine Learning be used to support the develop of control systems.
Machine learning can be used in developing predictive models. For example, ML algorithms can analyse historical and real-time data to predict system behaviour, allowing for proactive adjustments to maintain optimal performance.
Machine learning can also be used to tune the controllers of other control systems.
Provide three challenges with short descirptions of implementing AI in control systems.
Explainability and trust: Many AI models function as ‘black boxes’, making their decision making process hard to interpret. This lack of transparency can hinder strust, especially for say controllers in aviation.
Real time processing: Many control systems operate in real time environments. Ensuring that AI algorithms can process data quickly enough to make accurate and timely decisions can be significantly hard.
Data requirements: High-quality, large datasets for training. Acquiring such data, especially real-time, operational data, can be time consuming and expensive.
List the two types of AI
•Narrow AI (Weak AI): Specialised in a single task (e.g., virtual assistants, recommendation systems)
•General AI (Strong AI): Capable of understanding, learning, and applying intelligence across a wide range of tasks (still theoretical)
Provide two examples of Artificial Intelligence can be integrated into control system development to enhance efficiency and performance.
AI based Gain scheduling: In gain scheduling, AI uses recorded process data to adjust the controller parameters such as KPK_PKP, KIK_IKI, and KDK_DKD as operating conditions change. This helps the controller maintain good performance when the process is nonlinear or affected by disturbances.
Trained Neural Network: A trained neural network uses process input-output data to learn the system behaviour and then predict the required control action. It can either support the controller or act directly as the controller, which is useful for complex systems that are difficult to model mathematically.
When developing a control system why is knowledge of the system that is being controlled essential? Provide two examples of the type of information about a system that is required.
It is important that the the inputs (sensors) and outputs (actuators) of the system are well understood as well as the limitations of the system, sensors and actuators. The environment and expected disturbances are also need to be understood.
Inputs — what signals go into the system or controller.
Limitations — what physical or operational limits the system has
During the design process of a control system specifications are required.What do these specifications relate to? (Provide examples) and why are specifications important.
Specifications describe the ranges, limits, and errors for each of the inputs and outputs of the system. For a temperature control system, the input could be the desired room temperature, the output could be the heater command, and a specification could state that the heater must operate only within its physical limits.
Inputs/outputs: An input is the stimulus, excitation, or command applied to the control system for example a sensor output. An output is the actual response after the input has been processed, for example analogue signals.
Limitations of the system: Specifying the constraints the controller must obey, such as input/state constraints or actuator limits
Why are they important: The specifications provide a point at which to measure your system against. This is what you can refer to during the development
What is a crisp number
A crisp number is a known precise number, normally generated by a sensor and normally required by an actuator.
What is a Fuzzy membership function
Associated with terms that appear in the output stages of the rules. Provide a means of describing the fuzzy sets and how the membership value of a particular crisp number is set.
What is a potential issue with a Mean of Maxima Defuzzifier?
There is a risk that the mean of two output sets lies in the middle of the fuzzy sets, providing a crisp output of 0.
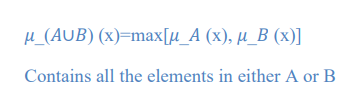
Provide the required calculation for fuzzy union (inference)
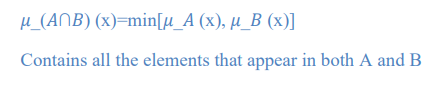
Provide the required calculation for fuzzy Intersection (inference)
Provide the required calculation for fuzzy Complement (inference)