AP Physics 1 ~ Torque & Rotational Motion Test Review
1/21
Earn XP
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai | Chat |
|---|
No analytics yet
Send a link to your students to track their progress
22 Terms
angular and linear (translational) velocity relationship
v=ωr
angular velocity
ω=⯅θ/⯅t
linear velocity (translational)
v=⯅d/⯅t
angular displacement
θ
linear displacement (translational)
s
parallel axis theorem
describes how to find the moment of inertia (𝐼) of a rigid body about any axis, given its moment of inertia about a parallel axis through its center of mass (𝐼cm), by adding the product of the body's total mass (m) and the square of the perpendicular distance (d) between the two axes:
𝐼=𝐼cm+md2
torque
𝜏=rFsinθ
𝜏=𝐼𝛼
𝜏=P/ω
work done by torque
W=𝜏⯅θ
angular momentum
L=𝐼ω
linear momentum (translational)
p=mv
moment of inertia
measures an object's resistance to changes in its rotational motion
𝐼=∑mr2
angular acceleration
α=⯅ω/⯅t
linear acceleration (translational)
a=⯅v/⯅t
angular and linear (translational) acceleration relationship
a=rα
angular and linear (translational) displacement relationship
s=rθ
rotational kinematics
use linear kinematics equations and replace values with the corresponding angular values
angular velocity (using frequency)
ω=2πf
angular velocity of a rotating object is equal to 2π times its frequency of rotation
change in angular momentum (angular impulse)
⯅L=𝜏⯅t
example (hollow sphere): ⯅L=(2/3)RMg⯅t
angular momentum of object moving in a straight line
L=rmvsinθ
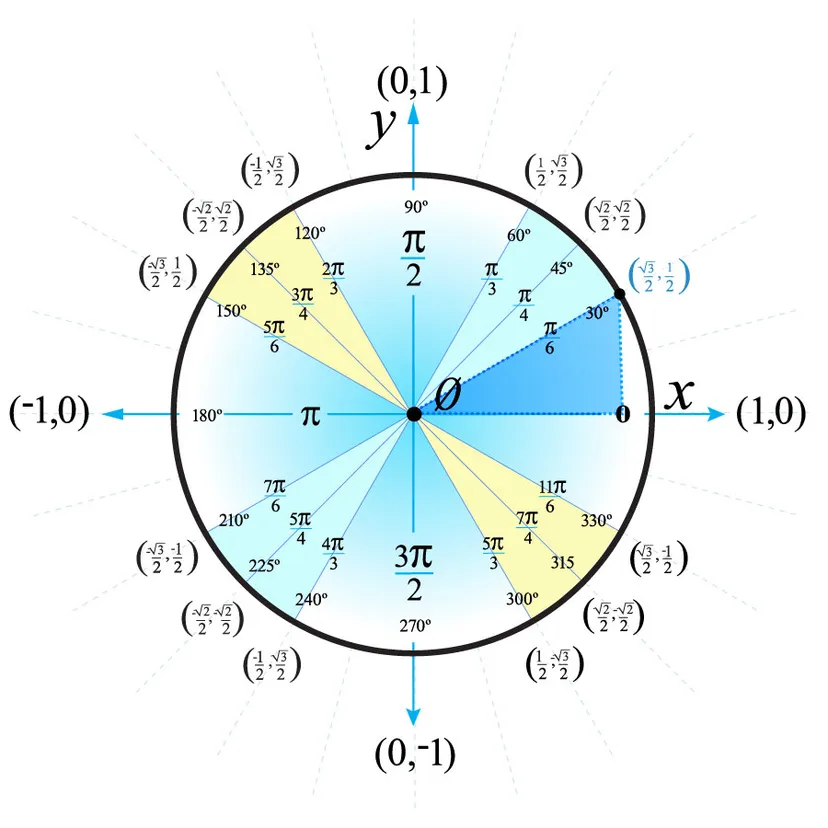
unit circle
circle with a radius of 1 (circumference 2π)
centripetal acceleration (UCM)
ac=rω2
rotational kinetic energy
use rotational equivalent velocity and substitute into the kinetic equation:
KER=(1/2)miri2ω2 = (1/2)Iω2