FW 453 Exam 2
1/75
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
76 Terms
Detectability: C = pN
N = abundance, C = Count Statistic, p = detection probability
Lincoln-Petersen Method
-Capture, mark, and release a sample of individuals from a population, then go back and recapture at a later date
-Proportion of marked individuals at second sample indicates the portion of the total population
Batch Marking
Groups of animals given the same mark
Lincoln-Petersen estimator: N= (n1n2)/m2
Estimates abundance, N = Abundance, n1 = individuals marked at occasion 1, n2 = individuals caught at occasion 2, m2 = marked individuals caught at occasion 2
Lincoln-Petersen estimator adjusted for bias
At smaller sample sites when the number of recaptures could be zero, N= [(n1+1)(n2+2)/(m2+1)]-1
Overall Detection Probability
p = m2/n2, probability = marked individuals caught at occasion 2/individuals captured at occasion 2
Lincoln-Petersen Assumptions
-closed population
-all animals have the same probability of being caught
-there is no tag loss or other loss of marks
Closed Populations
-Abundance is constant
-No gains or losses
-Most models
Open Populations
-Abundance may be constant or change
-Subject to gains and losses
-Estimate survival, recruitment, movement, etc... if sampling is well designed
Assumption of equal detection
-All animals have the same probability of being caught within an occasion
-Impacts could be: sampling technique, gear, time of year, home range differences between sexes
Violations of equal detection
Trap happy: more likely, probability increases, N decreases
Trap shy: less likely, probability decreases, N increases
Individual Marking
-Extra information
-Relax L-P assumptions
-More complex models and account for variation
Multiple Sample Capture-Mark-Recapture
-2 or more occasions
-More data to estimate, more precision
-Avoid some assumptions of LP
-no longer have same capture probability
M0 Model
Constant detection probability
Mt Model
Only time effects
Mb Model
Only behavioral effects
Mh
Only individual effects
Individual Capture Histories: 11010
C, C, NC, C, NC
What is 𝜔 equal to for capture histories
The individual encounter histories
𝑝_𝑖𝑗
capture probability for each individual: i
at each time: j
𝑐_𝑖𝑗
recapture probability for each individual: i
at each time: j
What is k equal to for capture histories
the number of capture/recapture occasions during the study
Probability rules
-Must be between 0 and 1
-The sum of probabilities for all possible outcomes of an event must equal 1
-The probability that an event does not occur is 1-the probability it does occur
-The probability that two events both occur together is found by multiplying the probabilities that they occur alone
-If the two events cannot occur together, the probability of them both occuring is found by adding their probabilities
Calculating Pr(𝜔) under Model M0
if captured: p
if not captured: 1-p
-probability of being captured-1 (probability must = 1)
Calculating Pr(𝜔) under Model Mt
if captured: p_k
if not captured: 1-p_k
-probability of being captured-1 (probability must = 1)
-each separate occasion has a different probability
Calculating Pr(𝜔) under Model Mb
if captured: p
if not captured: 1-c
-probability of being recaptured-1 (probability must = 1)
-since there are behavioral changes, you account for the probability of a recapture
Calculating Pr(𝜔) under Model Mh
if captured: p_w
if not captured: 1-p_w
-probability of being recaptured-1 (probability must = 1)
-since there are behavioral changes, you account for the probability of a recapture
Estimation
Use a likelihood based approach
-uise observed frequencies
-Multinomial likelihood
-Estimates p and c probabilities (capture/recapture)
-Can use to estimate N
-a function of time, behavior, individual heterogenetiy, and combinations
Why estimate abundances
-Management and conservation
-Science
Estimation challenges
-Sources of error
-Spatial variation
-Detection probability
-Open or closed population unknown
-Methods must be relevant to the scale
Census
Detection probability equals 1 and we count ALL individuals
Index
The count represents some number equal to, or less than, the true number of individuals present
Estimate
a measure of a state variable or vital rate based on a sample of observations
-Distance sampling, capture-mark-recapture, occupancy modeling
Distance Sampling Types
Line and Point
Line transect 6 assumptions
-animals directly on the line are always detected
-animals are detected at their initial location
-distances are measured accurately
-transect lines are placed randomly
-observation of animals are independent from each other
-there are sufficient samples to estimate the detection function
What is the violation of independence?
Clusters: animals may be in groups
-need mean cluster size
-need to account in variation of detection
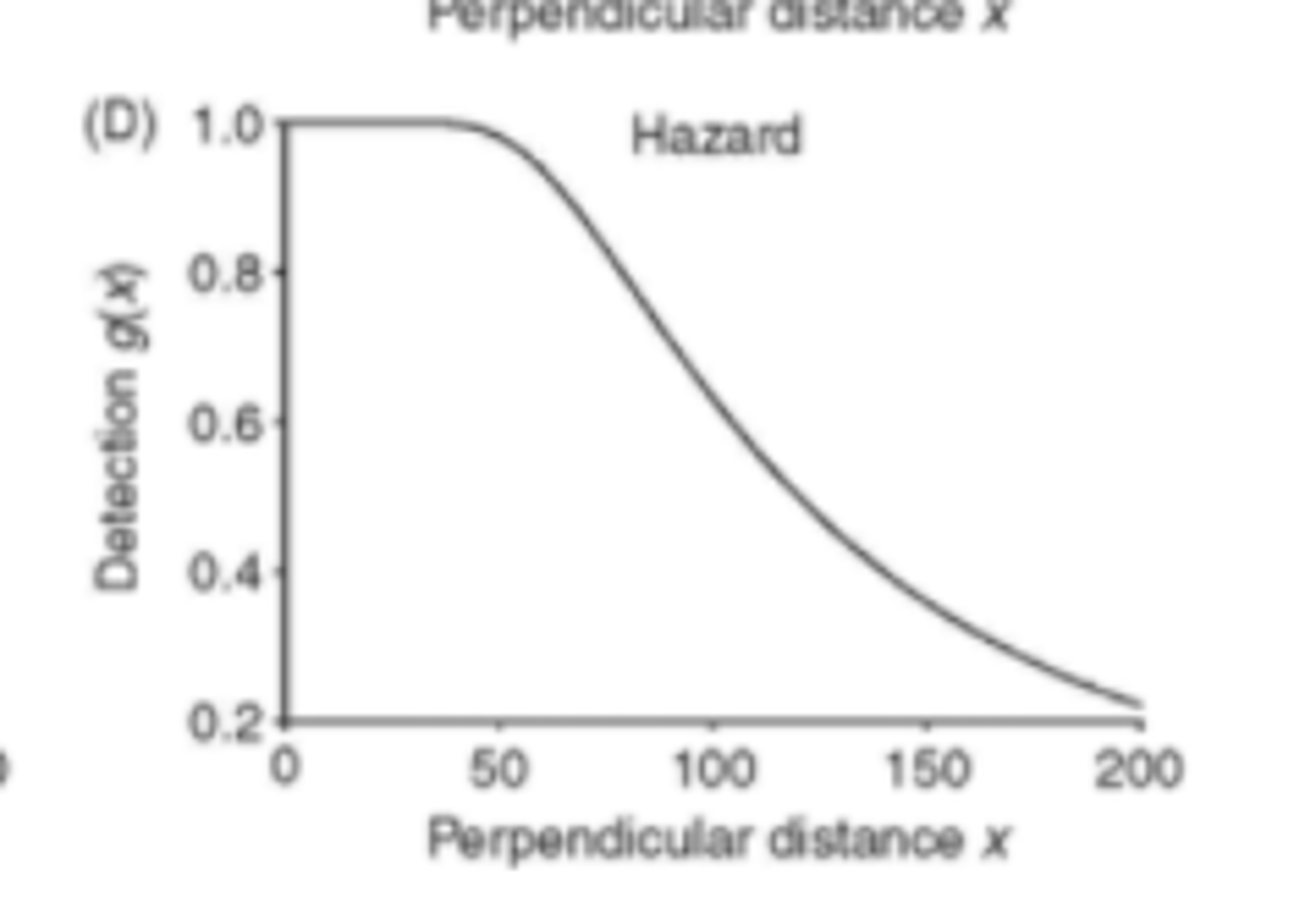
what is μ in relation to distance sampling?
half width of the area along a line transect
Hazard detection graph
Uniform detection graph
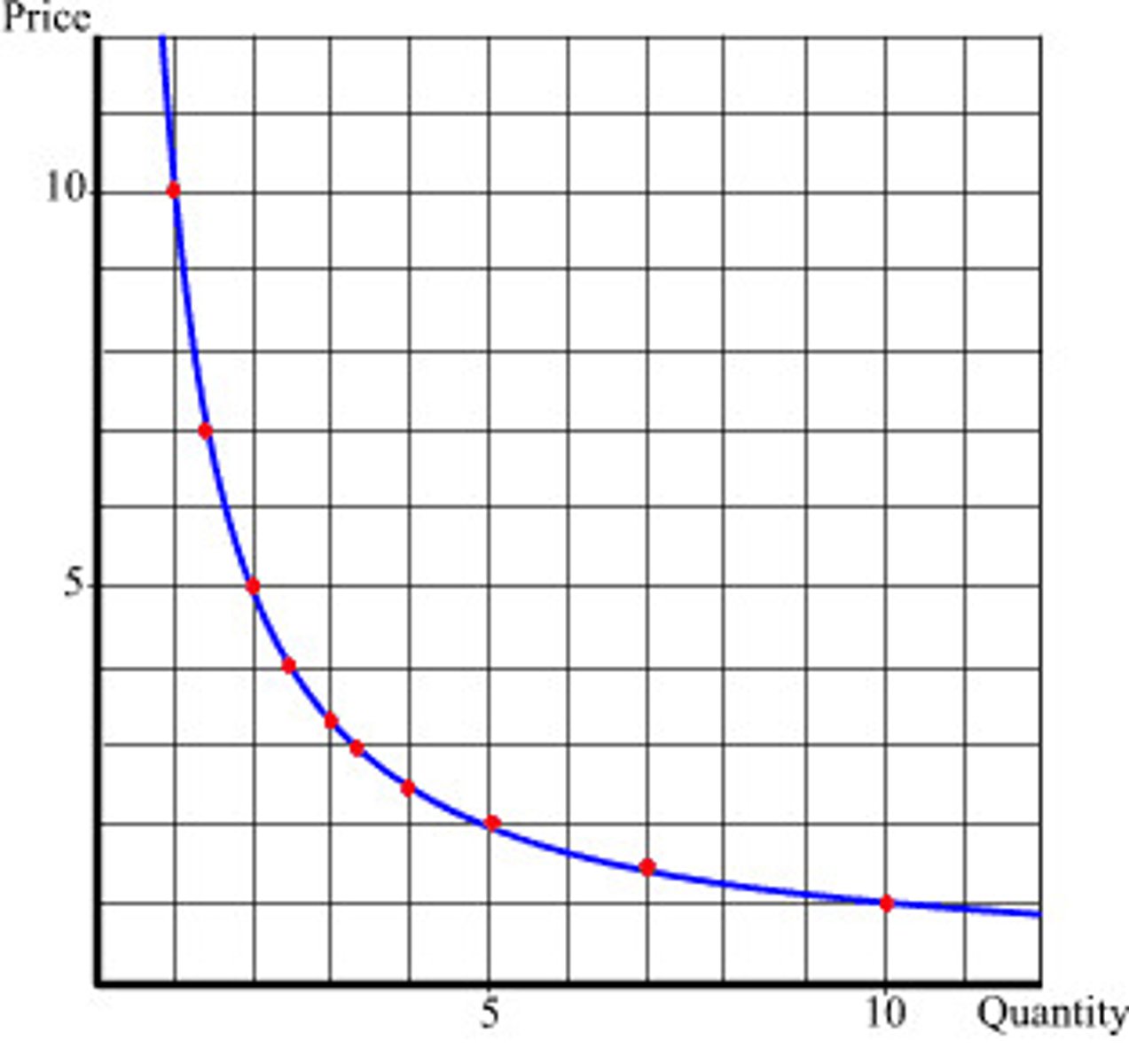
Negative exponential detection graph
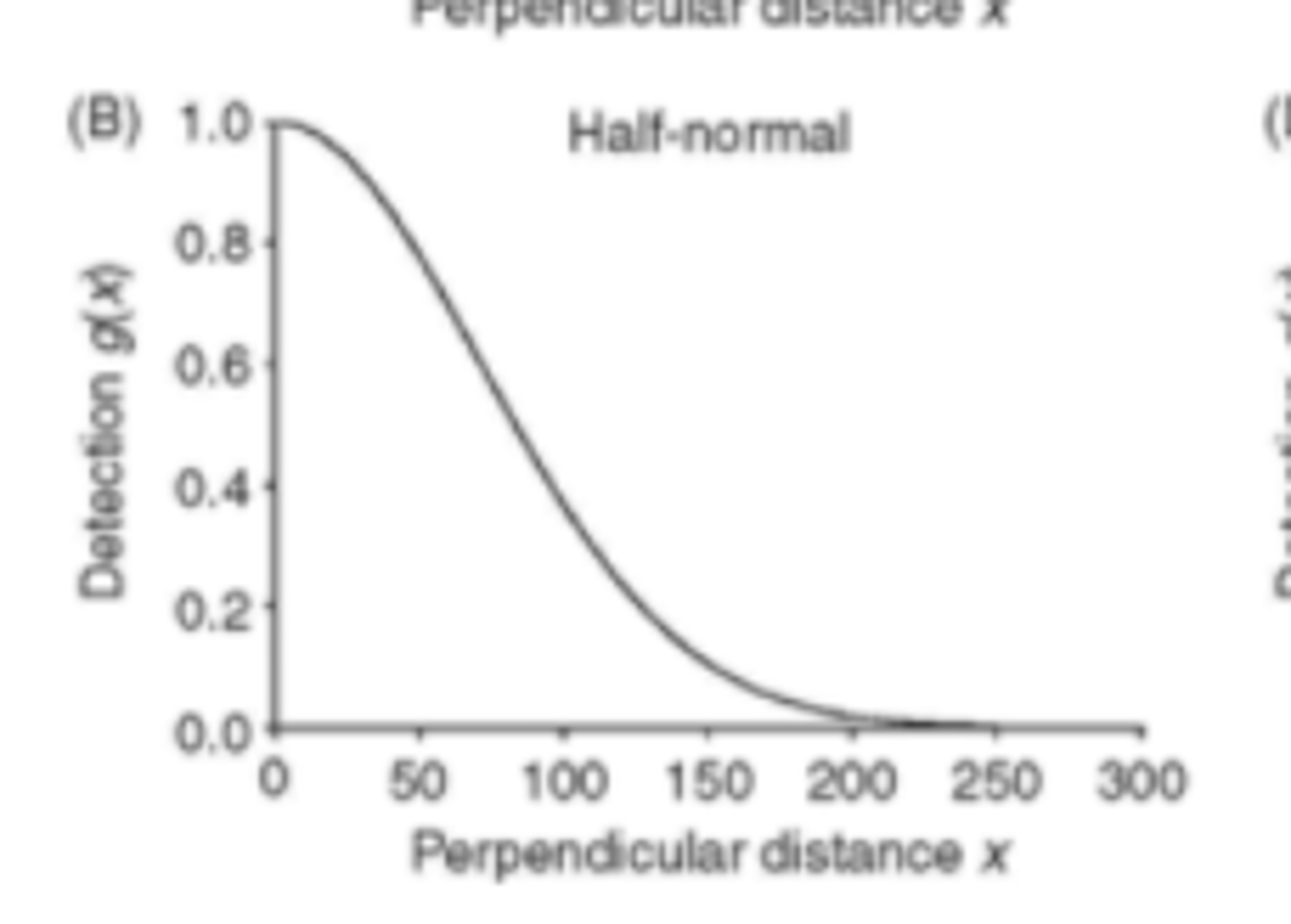
Half-normal detection graph
Pros and cons of line transects
-mammals
-larger areas quicker
-distance estimation while moving may be difficult
Pros and cons of point counts
-birds
-more practical in rough terrain
-fixed time
-more time to see or hear
-less area covered
Sampling principles
-objective
-target population
-sampling units
Cormack-Jolly-Seber (CJS) Model
-Apparent survival
-Capture probability
-Cannot estimate N
What is apparent survival
Cannot differentiate death from emigration
Jolly-Seber (JS) Model
-Estimation of survival AND recruitment
-Can estimate N with strong assumptions, but still difficult
Pollock's Robust Design Model
-Combines closed and open models, N, survival, and recruitment
-Flexible
What are the three open population models?
Cormack-Jolly-Seber, Jolly-Seber, Pollock's Robust Design
Cormack-Jolly-Seber Assumptions
-Capture and survival probabilities for marked animals are the same
-Instantaneous recapture and release of animals
-All emigration from the study area is permanent
Dead recovery parameters
s - survival probability
f - probability of tag recovery
What kind of survival can we get from telemetry studies
absolute survival
What can telemetry studies tell you for habitat
resource selection, home range estimation, movements and activity patterns
What can telemetry studies tell you about survival
known fate and Kaplan-Meier approaches, little detection error
Binomial models with "known fate" assumptions
-The fates of animals are known
-Fates are independent of eachother
Violations of binomial "known fate" models
Technological error, hunting, herding behavior
Censored Individuals
unknown what happened to the individual, left the capture site
Kaplan-Meier model
-allows for "known fates" and censoring
-allows for staggered entry
How to calculate population in the Kaplan-Meier model
Population = number of individuals - censored - dead
Issues with the life table analysis
-not actually estimating true population size
-dont know how many animals are in each age class
-assuming distribution is stable
-age classes can be targeted differently
Abundance vs. Occupancy
-Data to estimate abundance can be difficult to collect
-Obtaining occupancy data is usually less intensive and cheaper
Population level state variables
Abundance and density
Vital rates: survival and recruitment
Landscape level state variables
Patch occupancy of a single species
Vital rates: patch colonization and extinction
Community level state variables
Species richness, patch occupancy of multiple species
Vital rates: patch colonization and extinction of multiple species
What does absence data tell us
This species does not occur at the particular site or was not detected by the investigator
Site occupancy information uses
-Surveys of geographic range
-Habitat relationships
-Interspecific interactions
-Observed colonization and extinction
-Large scale monitoring programs
-Epidemiology
Site occupancy information problems
-Estimates what fraction of sites is occupied by a species
-Species are not always detected, even when present
Site occupancy information solutions
Replication
Temporal replication
repeat visits to sample units
Spatial replication
randomly selected 'sites' or sample units within area of interest
Naive occupancy
Species present detected at least once in all the total sites surveyed
Probabilistic Model Assumptions
-Sites are closed to changes in the occupancy state between sampling
-No heterogeneity that cannot be explained by covariates
-The detection process is independent at each site
-Species identifies correctly
Occupancy study design
-selecting sampling units
-season (breeding, migration, etc...)
-repeat surveys
Primary sampling seasons
Long intervals between sampling periods, occupancy can change
Secondary sampling periods
Short intervals between periods, occupancy not expected to change
Dynamic occupancy model assumptions
-no heterogeneity that cannot be explained by covariates
-the detected process is independent at each site
-species are IDed correctly
-no colonization and extinction between secondary periods
-no unmodeled heterogeneity in colonization or extinction between primary periods