MAT223 - Linear Algebra
1/61
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
62 Terms
The unit square is the subset of R² given by

An ordered basis { ⃗b1, ⃗b2} for R 2 is called positively oriented if . . .

Let F : R² → R² be a linear transformation. Then, the determinant of F, denoted by det(F), is . . .
The unit cube is the subset of R³ given by





Let A be an n × n matrix. A non-zero vector ⃗v is an eigenvector of A if . . .
there is a real number scalar λ such that A⃗v = λ⃗v.
The λ-Eigenspace of A is the vector subspace of R^n defined by . . .
The geometric multiplicity of λ is . . .
the dimension of the λ-eigenspace, dim(Eλ).
For an n × n matrix A, the characteristic polynomial of A is . . .
The sum of A and B is the m × n matrix given by . . .

The scalar product of A with c is the m × n matrix given by . .

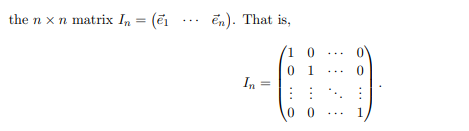
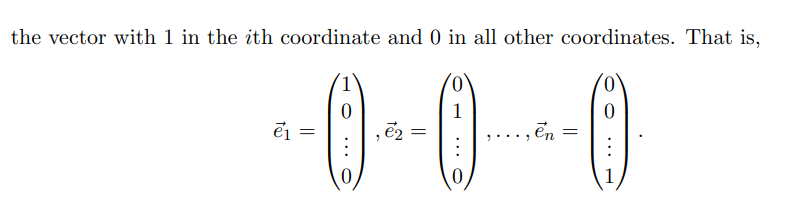
The identity matrix In is . . .
Let A be an n × n matrix. Then inverse of A, if it exists, is . . .
the matrix B so that AB = BA = In. In this case, we write B = A−1 .
An n × n matrix is called elementary if . . .
it can be obtained by performing exactly one row operation to the identity matrix.
The pivot of a row in a matrix is . . .
the leftmost nonzero entry in that row.
A matrix is in row echelon form if . . .
1. all rows consisting only of zeros are at the bottom, and
2. the pivot of each nonzero row in the matrix is in a column to the right of the pivot of the row above it.
A matrix is in reduced row echelon form if . . .
1. the matrix is in echelon form,
2. the pivot in each nonzero row is 1, and
3. each pivot is the only nonzero entry in its column.
A system of linear equations is called consistent
if it has at least one solution. If the system has no solutions, it is called inconsistent.
We say that xi is a basic variable for the system if . . .
the ith column of rref(C) has a pivot
We say that xi is a free variable of the system if . .
the ith column of rref(C) does not have a pivot.





Otherwise, the vectors are called linearly independent.

A vector space (over the real numbers) is any set of vectors V in Rn that satisfies all of the following properties:

Let V be a vector subspace of Rn . A spanning set (also known as a generating set) for V is . . .
any subset B of V so that V = Span(B).
(Spanning set = "bộ nguyên liệu tối thiểu" để tạo ra toàn bộ không gian V. Thay vì phải mô tả vô số vector trong V, ta chỉ cần liệt kê vài vector trong B — và từ đó có thể tạo ra tất cả.)
A subset B of a vector space V is called a basis if . . .
1. B is a spanning set for V , and
2. B is linearly independent.
Let V be a nonzero vector subspace of R n . Then, the dimension of V , denoted dim V , is . . .
the size of any basis for V .



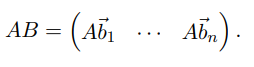
Let A be an m × n matrix. Then, the matrix transformation associated to A is the function . . .


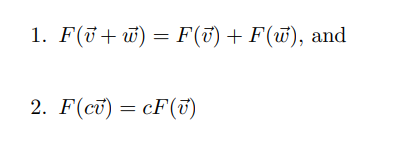
Let F : Rn→ Rm be a linear transformation. Then, the defining matrix of F is the m × n matrix M satisfying
A function f : X → Y is called one-to-one (or injective) if the following property holds . .
for every y ∈ Y , there is at most one input x ∈ X so that f(x) = y.
A function f : X → Y is called onto (or surjective) if the following property holds . . .
for every y ∈ Y , there is at least one input x ∈ X so that f(x) = y.
A function f : X → Y is called bijective if . . .
f is both injective and surjective.
Let V be a subspace of Rn and W a subspace of Rm. An isomorphism between V and W is . . .
any linear bijective map F : V → W.





The rank of F is . . .
the dimension of im(F),
F tạo ra được không gian bao nhiêu chiều?
The nullity of F is . . .
the dimension of ker(F),
F 'xóa' đi bao nhiêu chiều?


The null space of A is the subspace of Rn given by

Let A be a matrix.
The nullity of A is . . . (nullity(A))
The rank of A is . . .(rank(A))
the dimension of Nul(A)
the dimension of Col(A)
A system of linear equations is called homogeneous if . . .
the constant coefficients are all equal to zero.



Two n × n matrices B and C are called similar if they represent the same function, but in possibly different bases. That is . . .
An n × n matrix D is called diagonal if . . .
An n × n matrix is called diagonalizable if . . .
it is similar to a diagonal matrix.
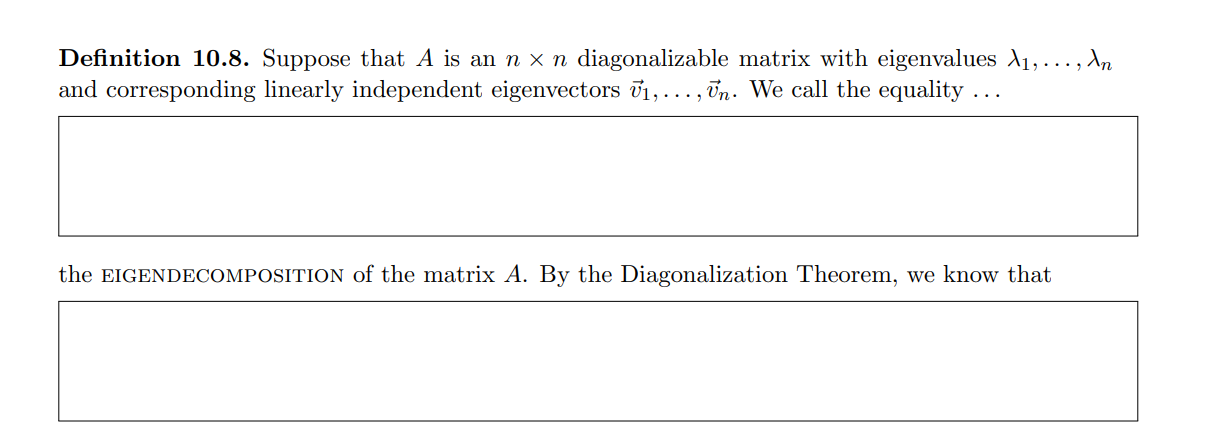
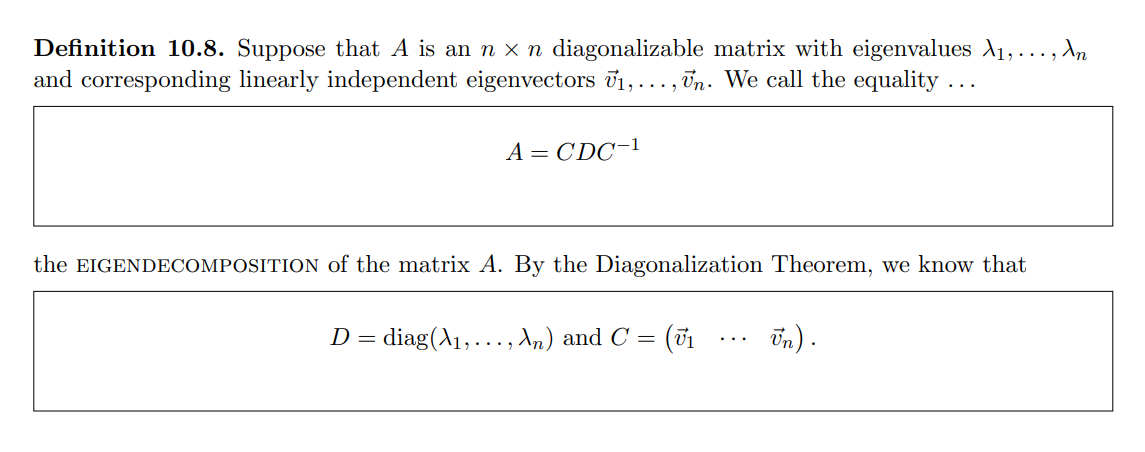
(The Diagonalization Theorem). An n × n matrix A is diagonalizable if and only if . . .
In this case, there are linearly independent eigenvectors ⃗v1, . . . , ⃗vn with corresponding eigenvalues λ1, . . . , λn for A so that D = C −1AC where . . .
A has n linearly independent eigenvectors.


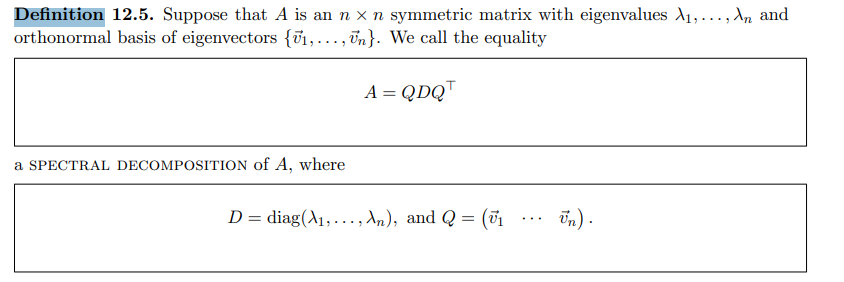
We call an n × n matrix Q orthogonal if . . .
its column vectors form an orthonormal basis for Rn .