physics final exam study guide
1/93
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
94 Terms

Where in space was the rock three minutes before it passed through the origin?
position update formula


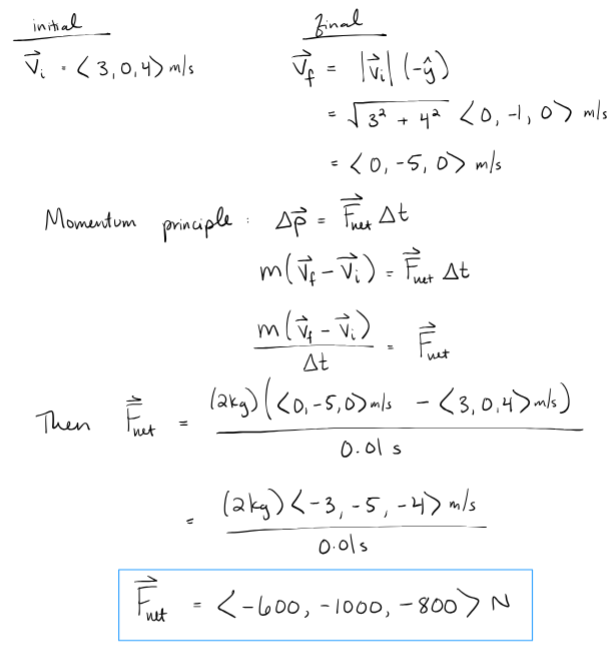
determine what is the force F that caused this change in motion
momentum principle
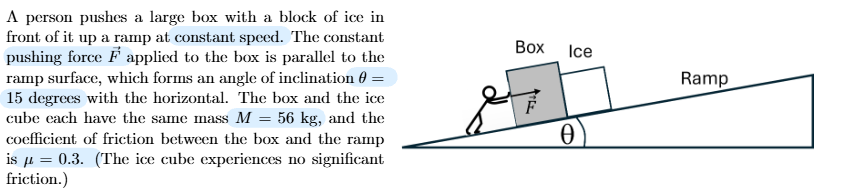
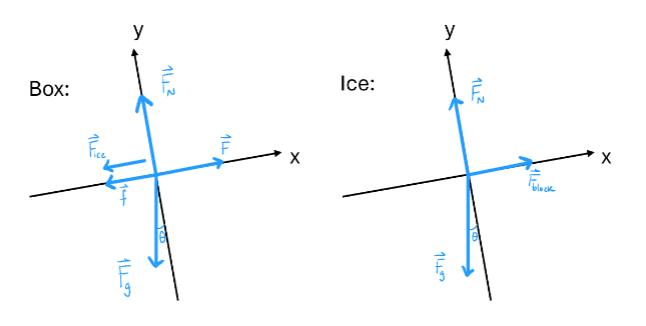
Use the tilted coordinated system below to draw two free body diagrams: (a) one diagram that
includes all the forces acting on the box, and (b) another diagram that includes all the forces acting on the
block of ice. Your diagram should include angles where needed.
For the box: normal force points up, Force points right, gravity force points down at theta degrees left of vertical, frictional force points left, and force from ice points left.
For the ice: normal force points up, force from block points right, and gravitational force points down at theta degrees.
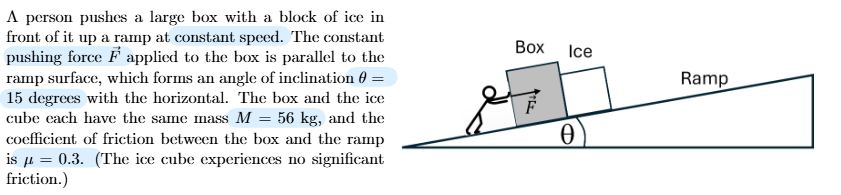
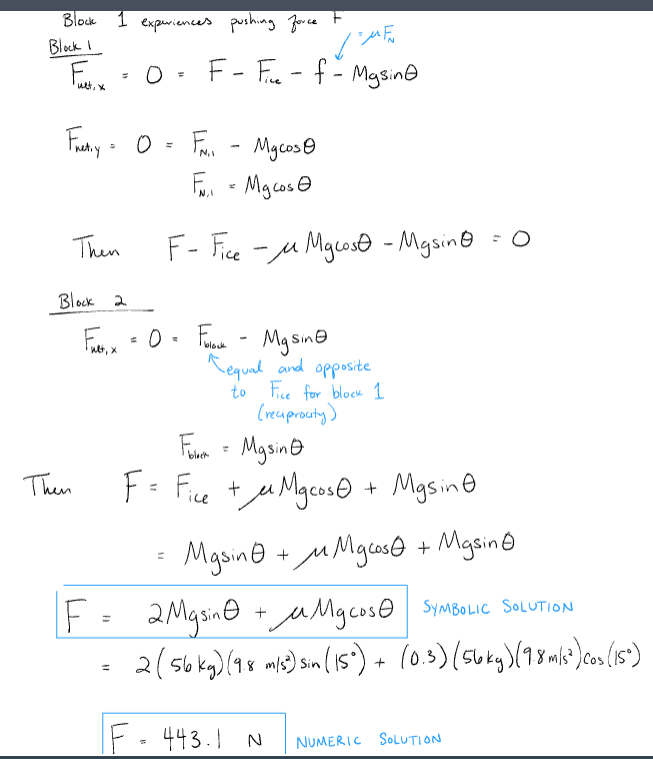
Find the magnitude F of the pushing force.
break Fnet into x and y components and only focus on the x component. set Fnet_x to zero since velocity is constant. also set the system as both the block and ice.
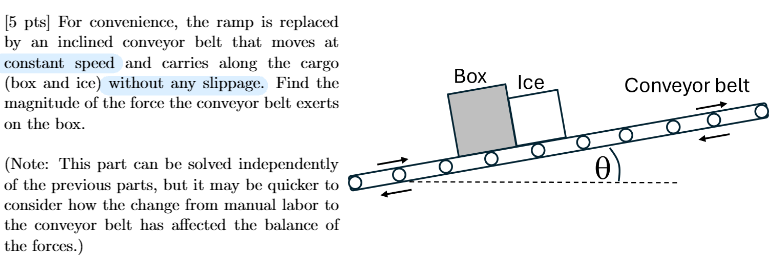
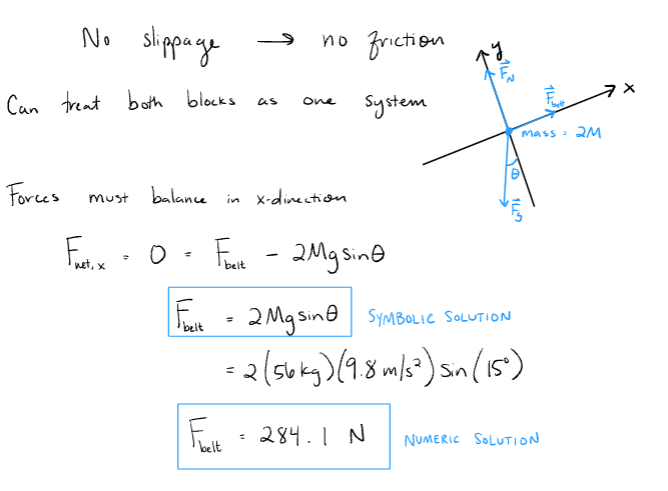
Find the magnitude of the force the conveyor belt exerts on the box.
the frictional force from the belt is the force the conveyor belt exerts on the box. just set up Fnet_x and set it to zero due to no slipping. also set up system and both ice and block.
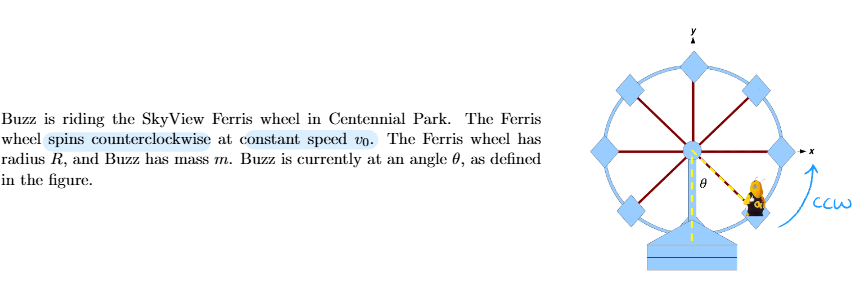
What is the net force on Buzz in the direction parallel to the motion?
zero since velocity is constant.
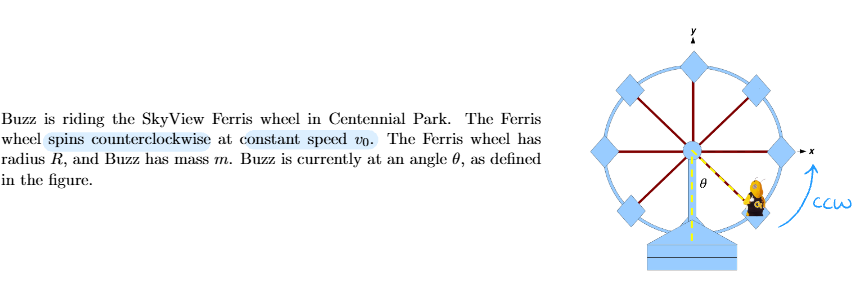
What is the net force on Buzz in the direction perpendicular to the motion?
just set it to the definition of Fnet_perpendicular, (mv²)/R in the n hat direction.
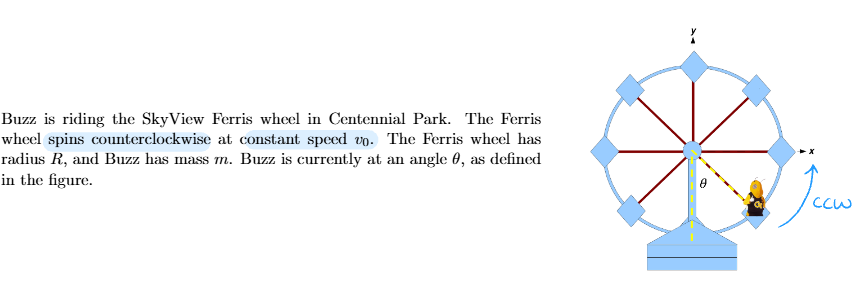
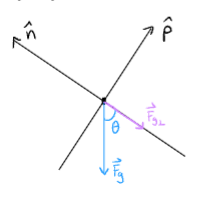
What is the magnitude of the perpendicular component of the force of gravity?
find the component of gravitational force aligned with n hat via soh cah toa.
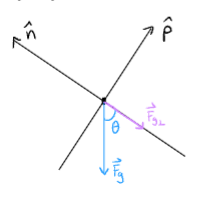
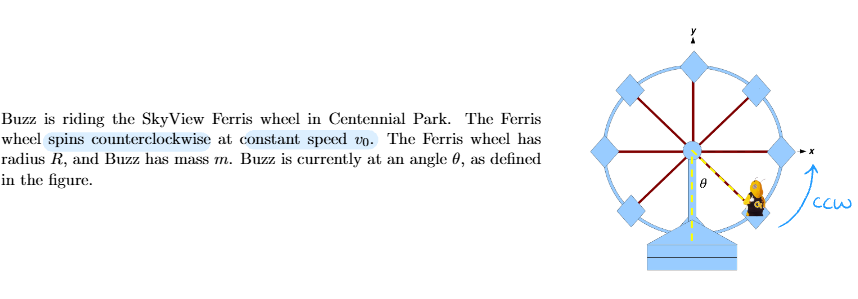
What is the magnitude of the parallel component of the force of gravity?
find the component of gravitational force aligned with p hat via soh cah toa.
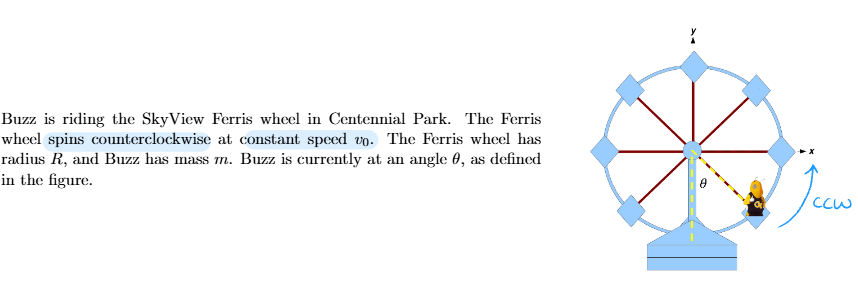
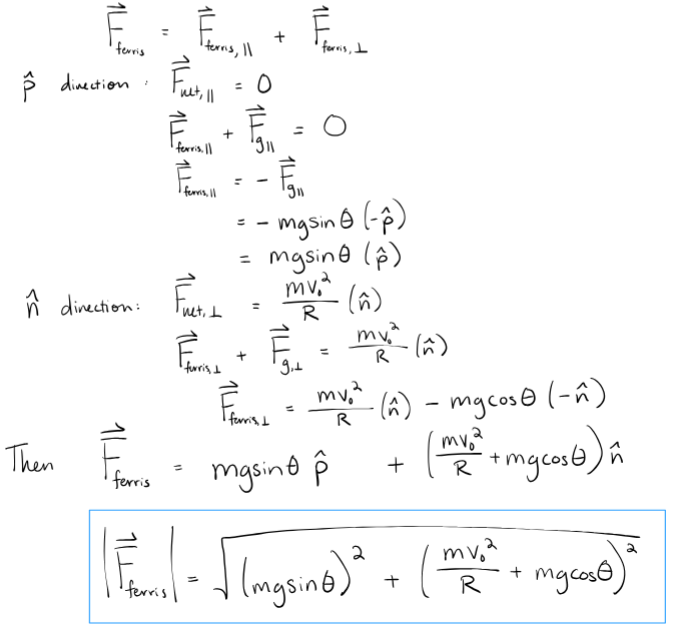
What is the magnitude of the force of the Ferris wheel on Buzz?
break up the Fnet into parallel and perpendicular components. set Fnet_parallel to zero due to constant velocity. set Fnet_perpendicular to its definition. Finally, add up the parallel and perpendicular components from the ferris wheel, and find the magnitude of that sum.
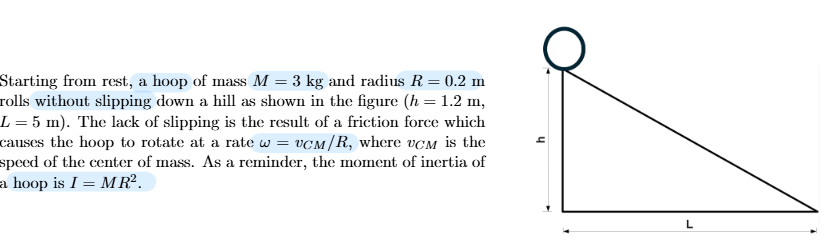
Applying the energy principle on the real system consisting only of the hoop, determine the work done by the friction force on the hoop as it rolls from the top to the bottom of the hill.
zero since hoop doesn’t slip → r = 0.
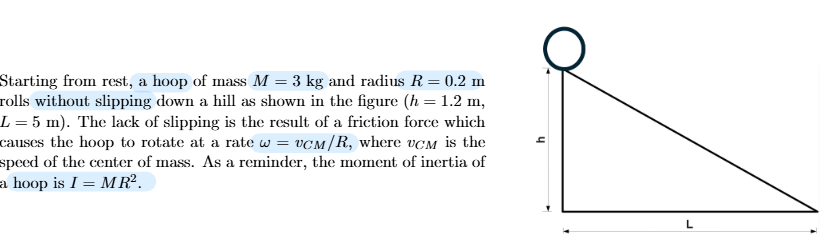
Applying the energy principle on the real system consisting only of the hoop, determine the NET work done on the hoop as it rolls from the top to the bottom of the hill.
only force is coming from gravity, set up component form multiplication to find work done by gravity.

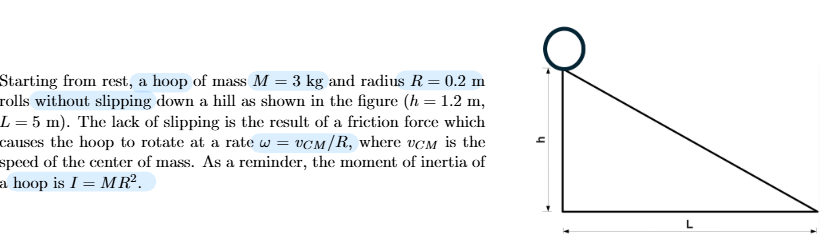
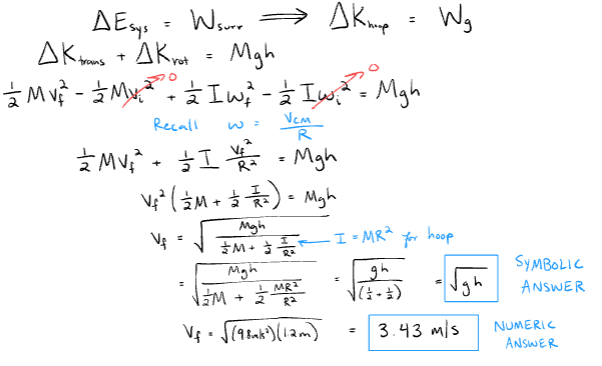
Applying the energy principle on the real system consisting only of the hoop, determine the speed of the hoop when it reaches the bottom of the hill.
set delta energy of the system, which is delta k_trans + delta k_rot, to work done by surroundings, which is work done by gravity. remember to convert omega(w) to v_cm/R. also, inertia from a hoop is MR².
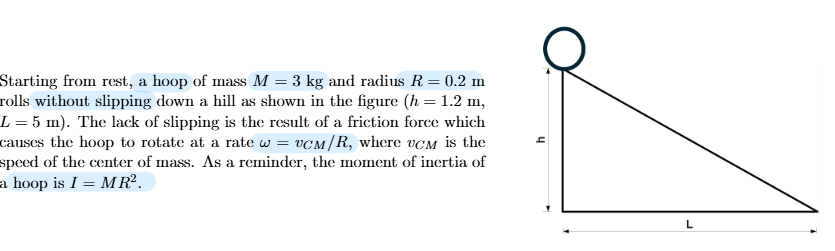
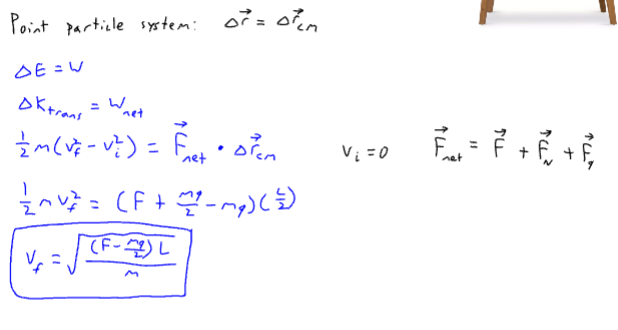
Applying the energy principle on the point particle system consisting only of the hoop, determine the magnitude of the friction force (assumed constant) acting on the hoop as it rolls to the bottom of the hill. v_f = sqrt(gh) from a previous problem.
since its point particle, work done by friction exists, so work done by surroundings is work done by gravity + work done by friction. remember delta energy of the system only equals to delta k_trans due to point particle system. remember to definition for all work is the product of the magnitudes of force and r.

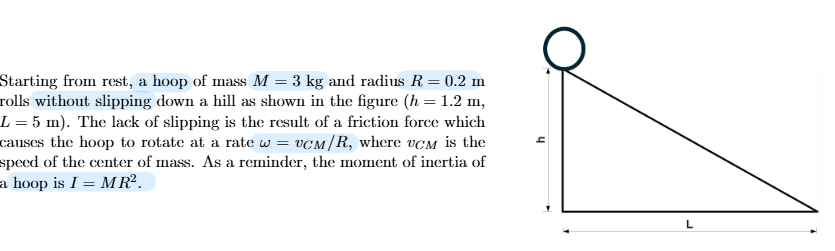
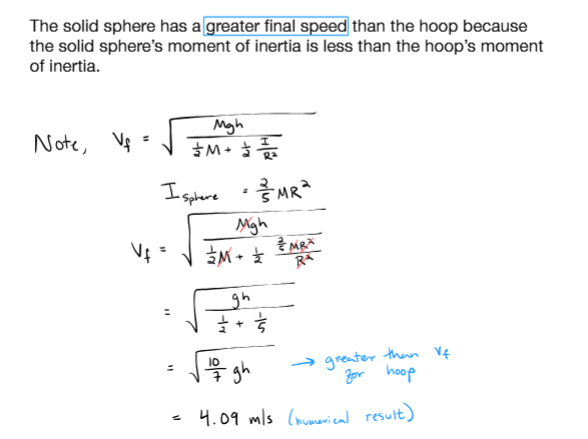
Starting from rest, a solid sphere with the same total mass M and radius R rolls down the hill. Does the sphere have a final speed (at the bottom) that is greater than, equal to, or less than the hoop’s final speed? Briefly explain how you know this; you don’t need to do a full calculation of the sphere’s final speed.
solid sphere is faster since its inertia is less compared to the hoop.
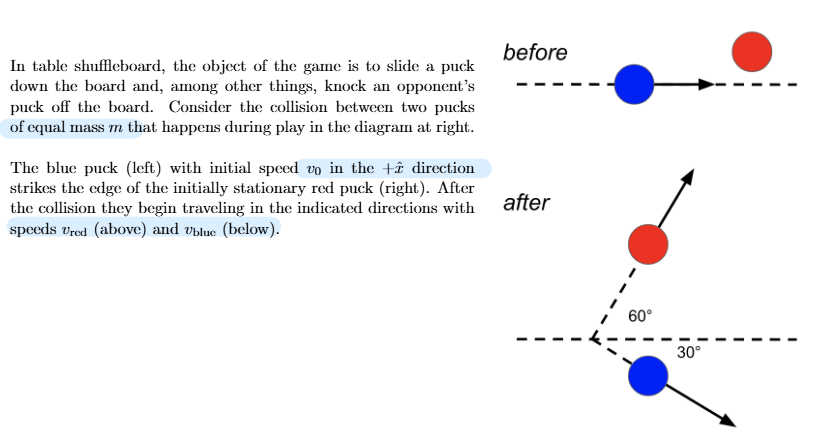
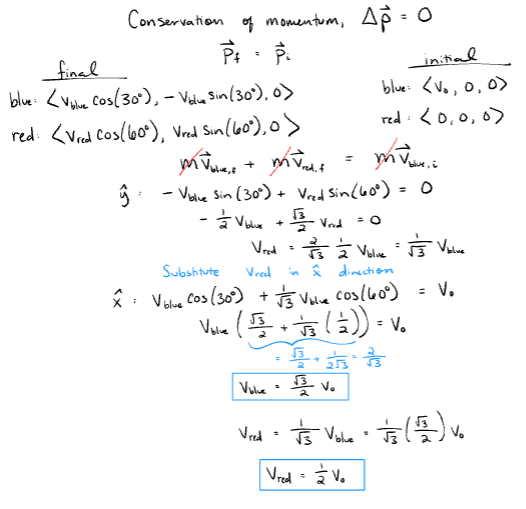
What are the speeds v_red and v_blue? look up trig identities online.
conservation of momentum and know your trig identities, though i dont think they take points off if you dont simplify them to their trig identities. name of the game is substitution.
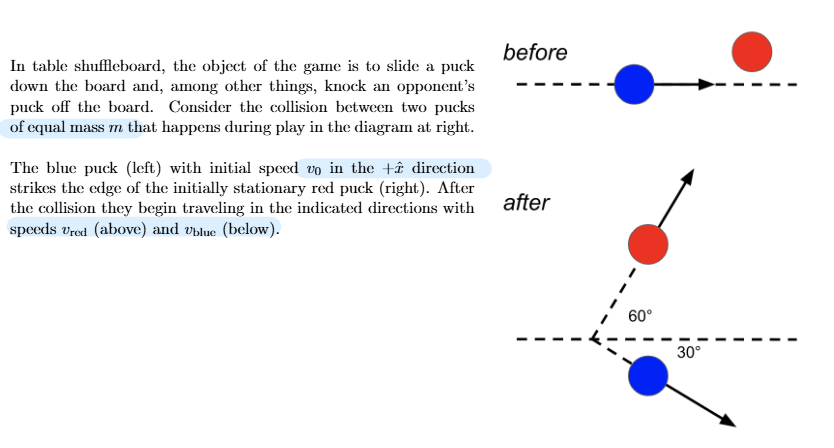
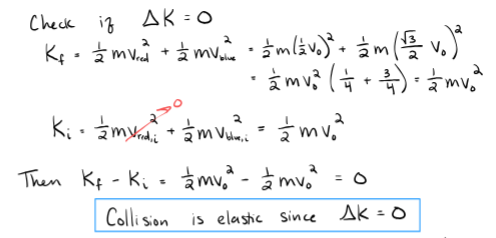
Is the collision elastic or inelastic? Indicate how you know by writing and simplifying an appropriate equation.
elastic since delta k = 0. you can find this by setting k_f = k_i and checking if its true.
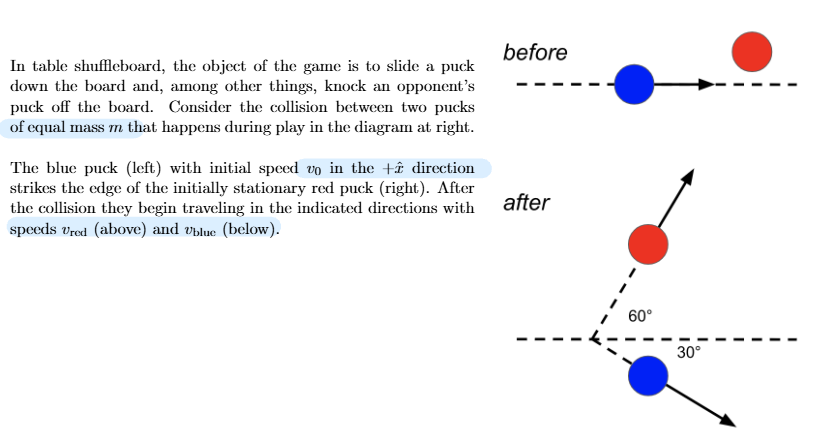
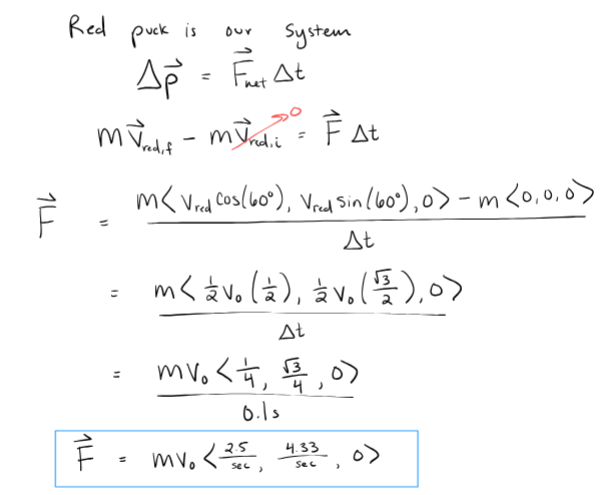
During the collision, the pucks are in contact for 0.1 s. What is the contact force F of the blue puck on the red one? Assume that F is constant during the collision.
momentum principle.
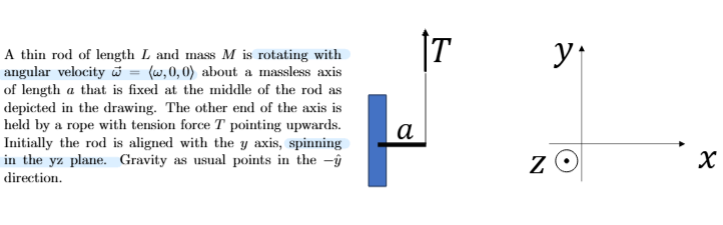
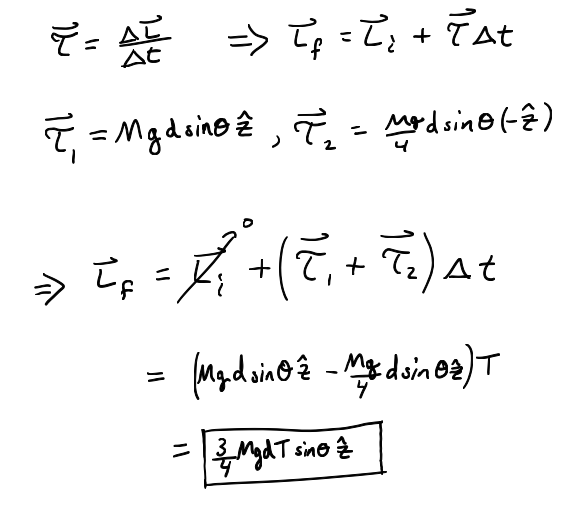
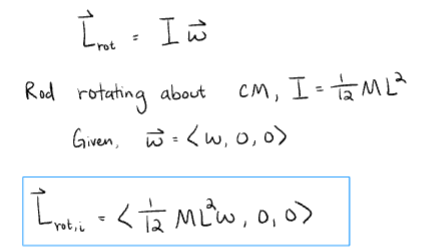
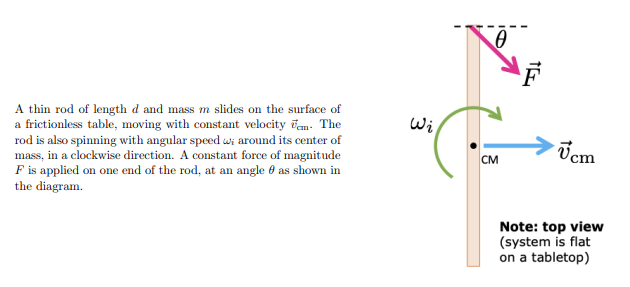
Calculate the initial rotational angular momentum L_rot_i of the rod about its center of mass.
just the definition of L, which is the product of inertia and angular velocity.
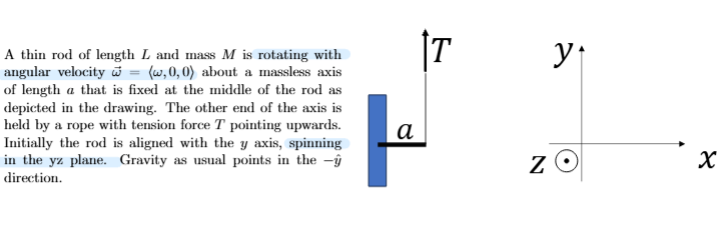
The tension T balances the weight of the rod, such that its center of mass remains in the xz plane at all times. Calculate the initial net torque (magnitude and direction) on the system about the point where the rope attaches to the rod.
just the definition of torque, which is r from the point to the rod times force.
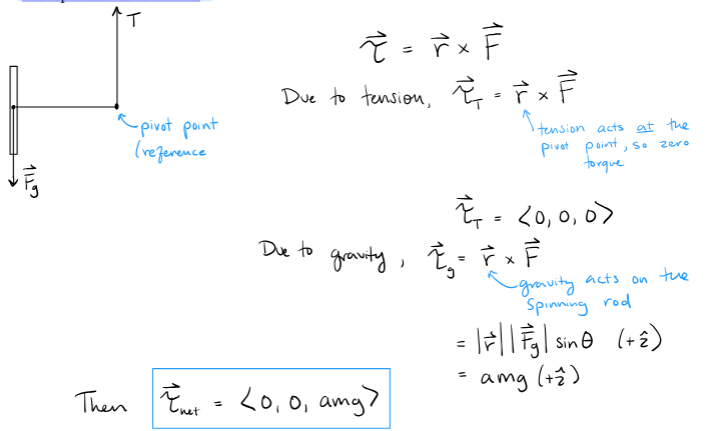
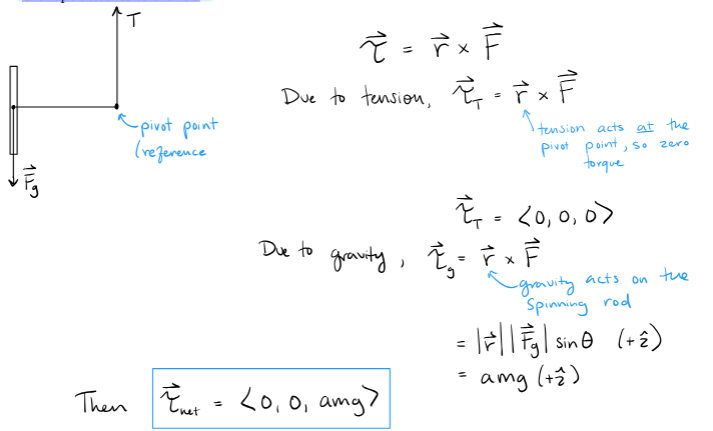
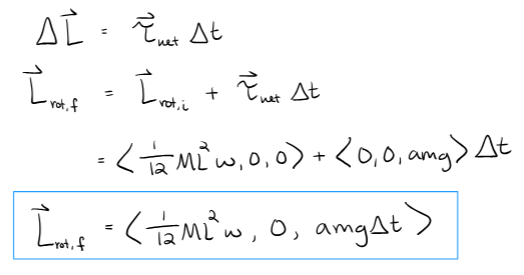
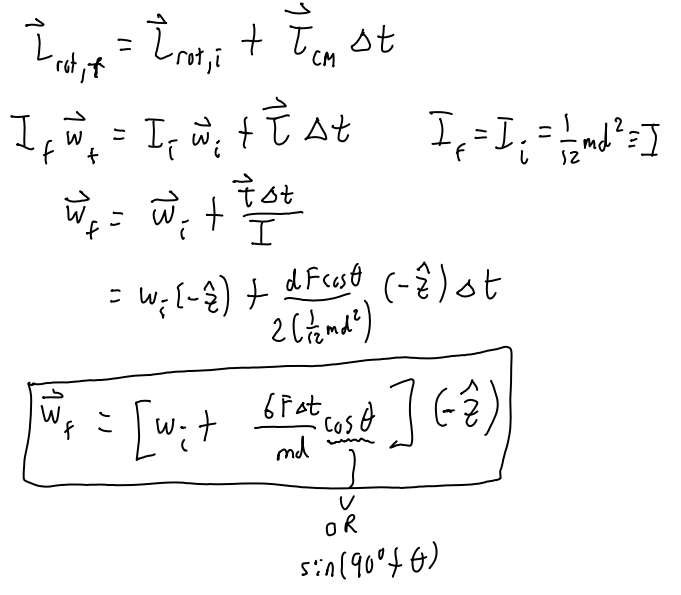
Using the Angular Momentum Principle, calculate the rotational angular momentum of the rod L_rot_f after a short time interval deltat.
same as momentum principle, but its deltaL instead of deltaP and net torque instead of net force.

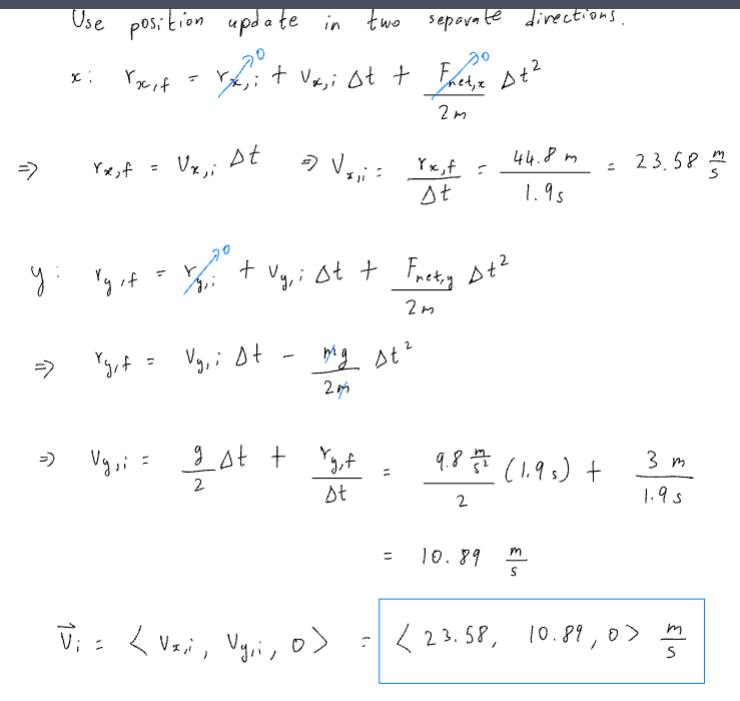
what was the initial velocity v_i of the ball?
two position update formulas for the x and y directions, remember Fnet_x is zero and Fnet_y is -mg

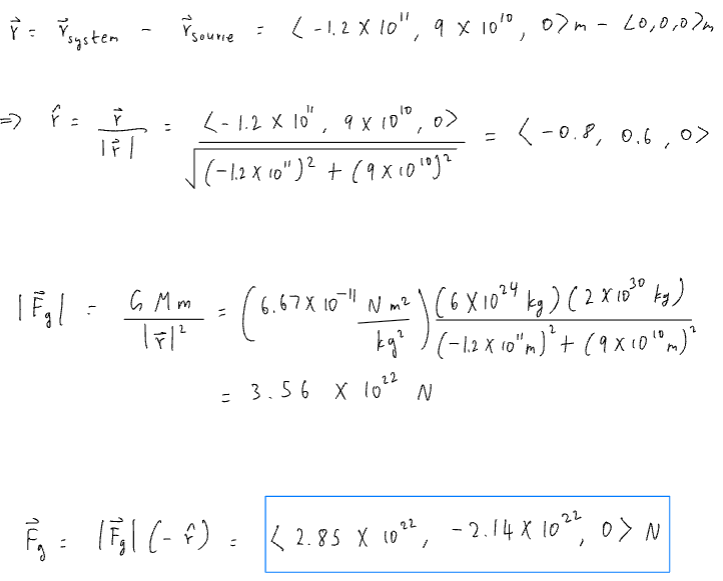
Determine the gravitational force Fg that the star exerts on the planet at t = 0.
just use the gravitational force formula. remember r = r_system - r_source.

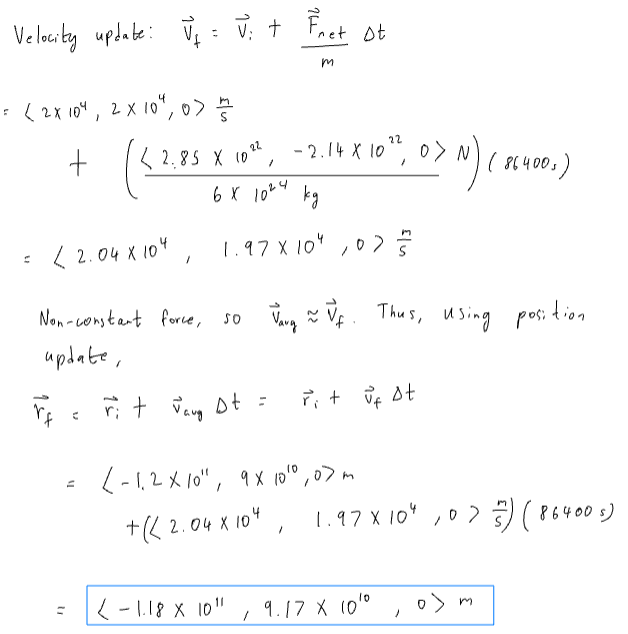
Determine the position r_f of the planet 24 hours later. Fg is <2.85 × 10 ^ 22, -2.14 × 10 ^ 22, 0> from a previous problem.
velocity and position update formulas. since its a non constant force, v_avg = v_f when using the position update formula.
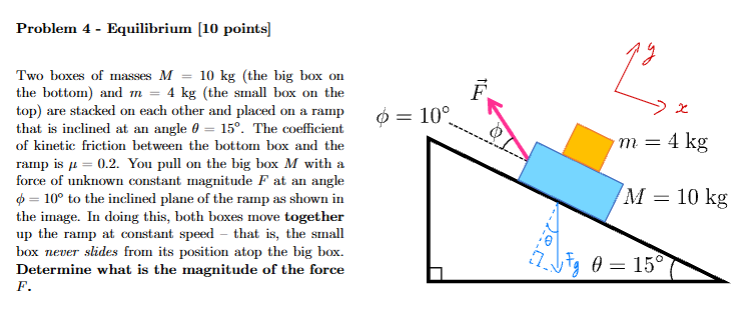
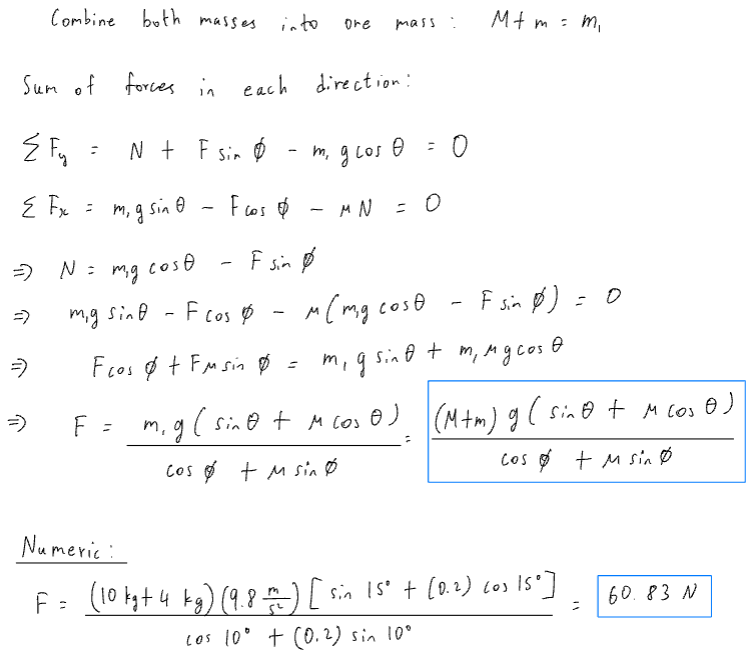
Determine what is the magnitude of the force F.
set the system to both blocks. break up Fnet into x and y components and set both the zero since constant velocity. find normal force using Fnet_y, and plug in that value into Fnet_x’s normal force. finally, put force F on one side of that equation.
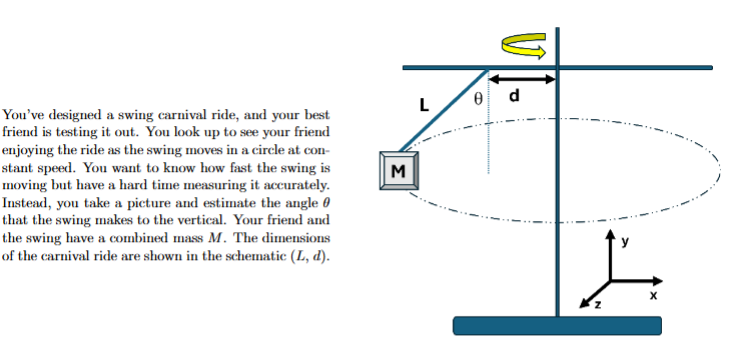
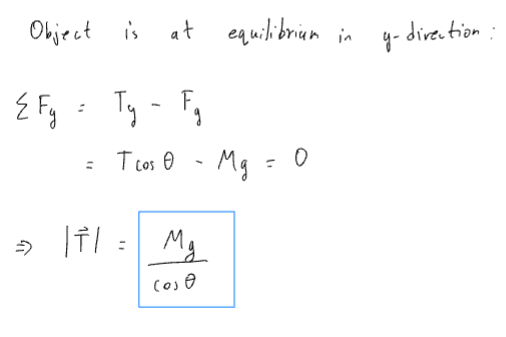
What is the magnitude of the tension in the rope, T ? Your answer may use any or all of these variables: M , g, theta, L, d.
set up Fnet_y and set it to zero due to constant velocity.
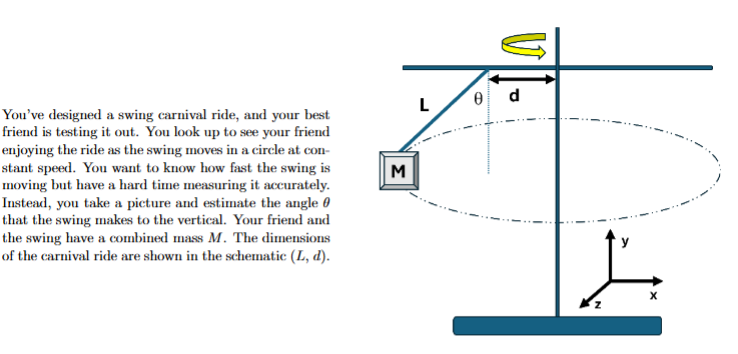
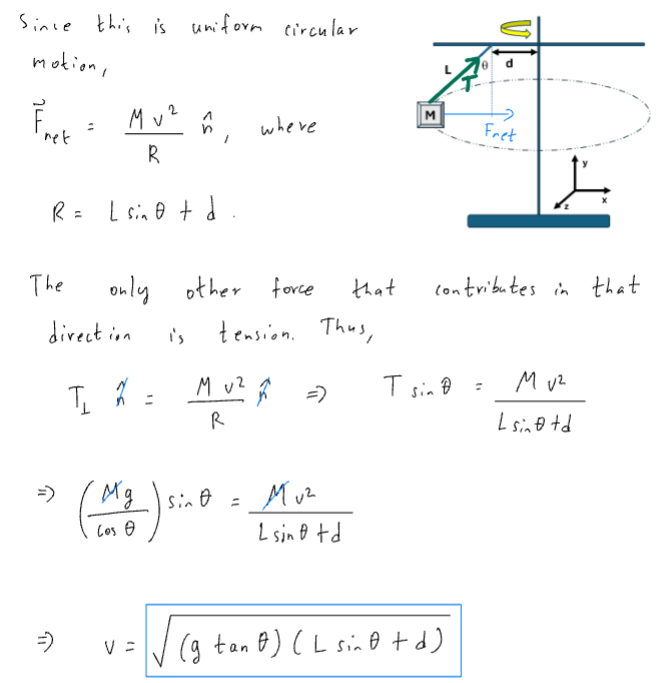
What is the speed v of the system, in terms of the variables M , g, theta, L, d?
set Fnet_perpendicular to its definition where R = Lsin(theta) + d.
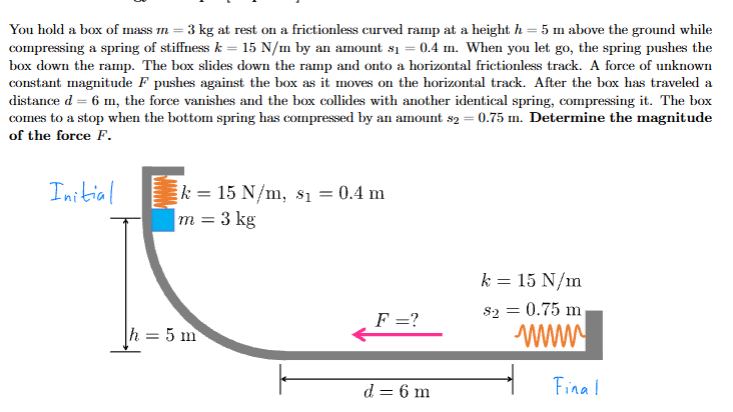
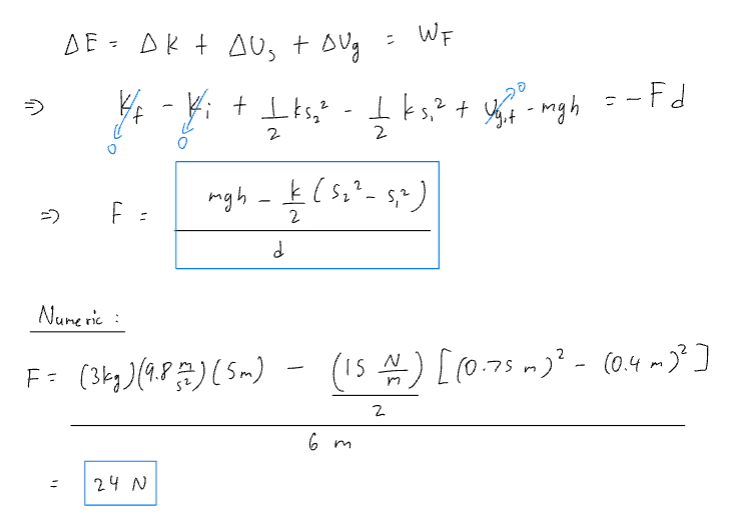
Determine the magnitude of the force F .
use the energy equation W done by non-conserved forces = deltaE of all forces acting in the system.
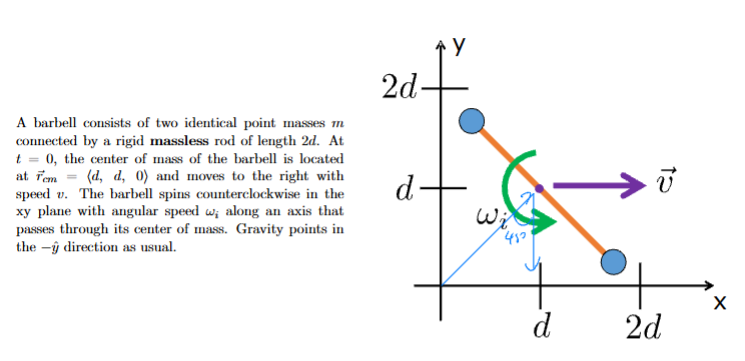
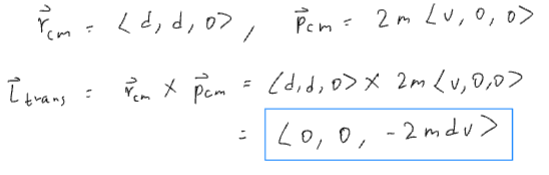
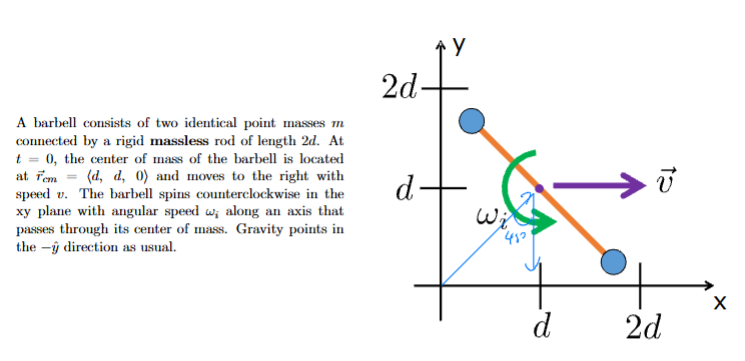
Determine the translational angular momentum Ltrans of the barbell, with respect to the origin.
simple angular momentum formula where L = r times p
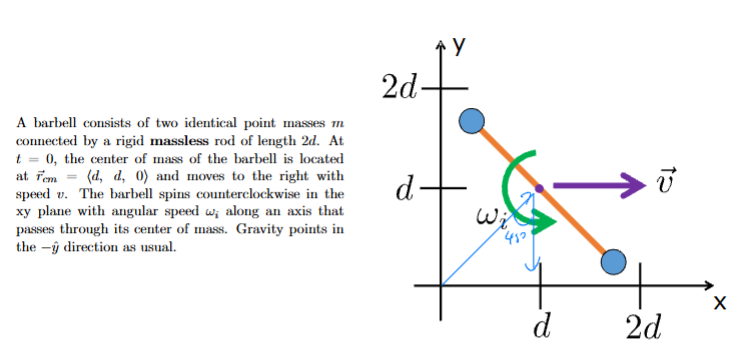
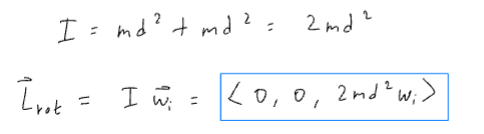
Determine the rotational angular momentum Lrot of the barbell.
simple angular momentum formula wher L = I times w.
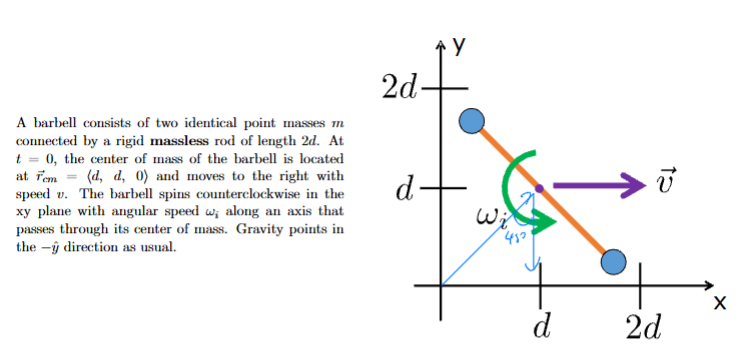
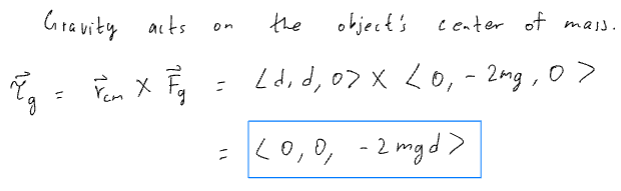
Determine the torque exerted by gravity t_g on the barbell, with respect to the origin
torque formula t = r times Fg
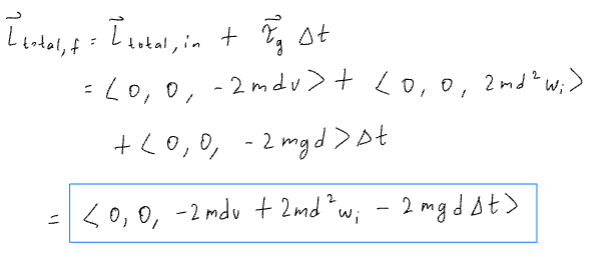
What is the total angular momentum of the barbell Ltotal,f with respect to the origin a short time !t later?
torque update formula, where L_f = L_i + t_net * deltaT
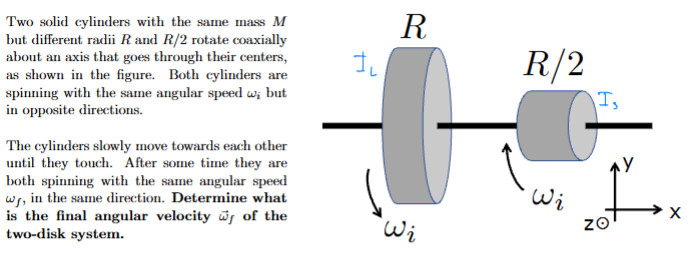
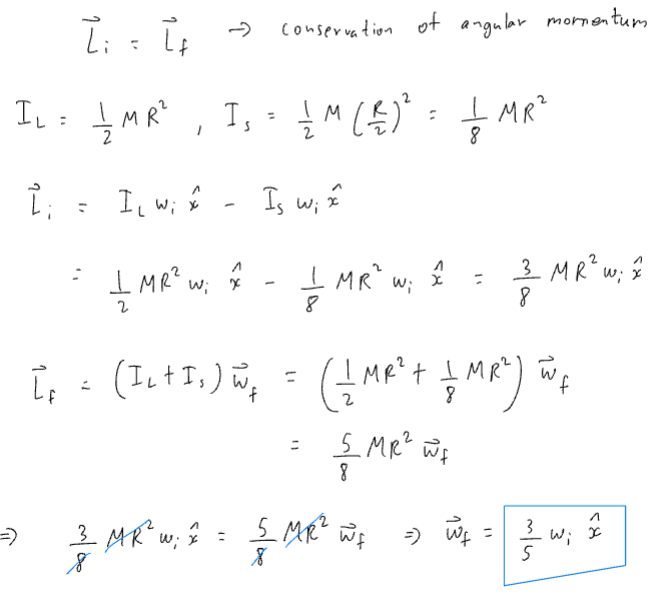
Determine what is the final angular velocity w_f of the two-disk system.
conservation of angular momentum and L = Iw
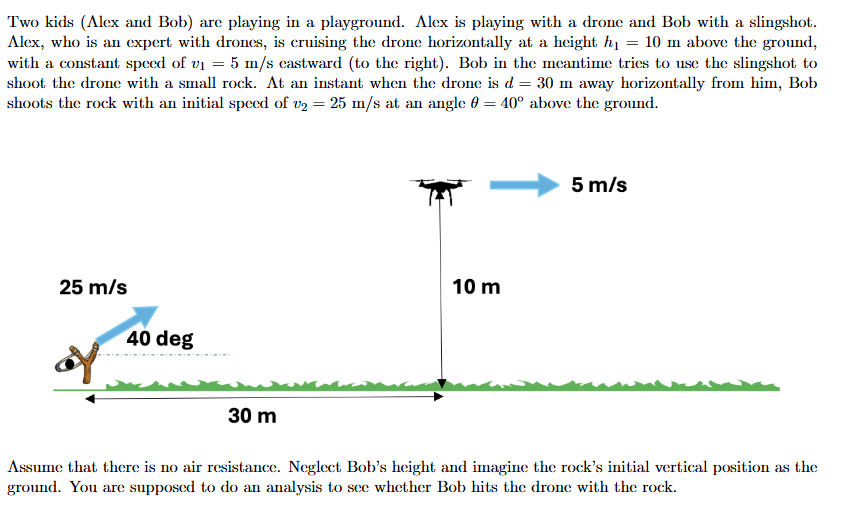
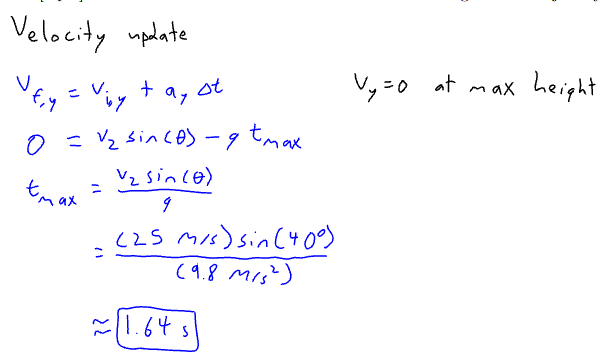
At what time does the rock reach its maximum height in its trajectory?
velocity update formula.
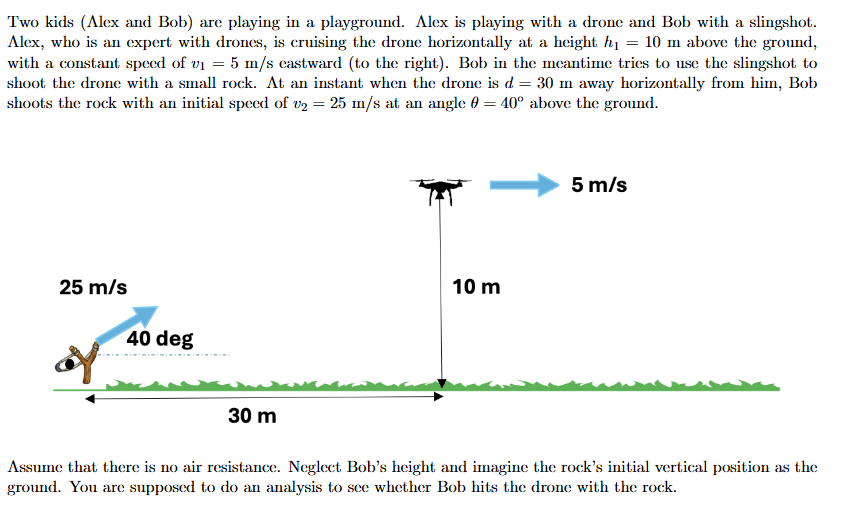
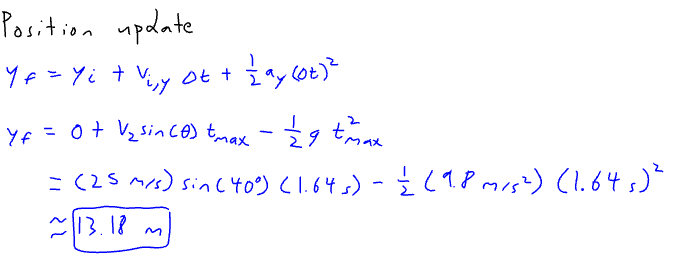
Calculate the maximum height reached by the rock. deltaT is 1.64s from a previous problem.
projectile position update formula.
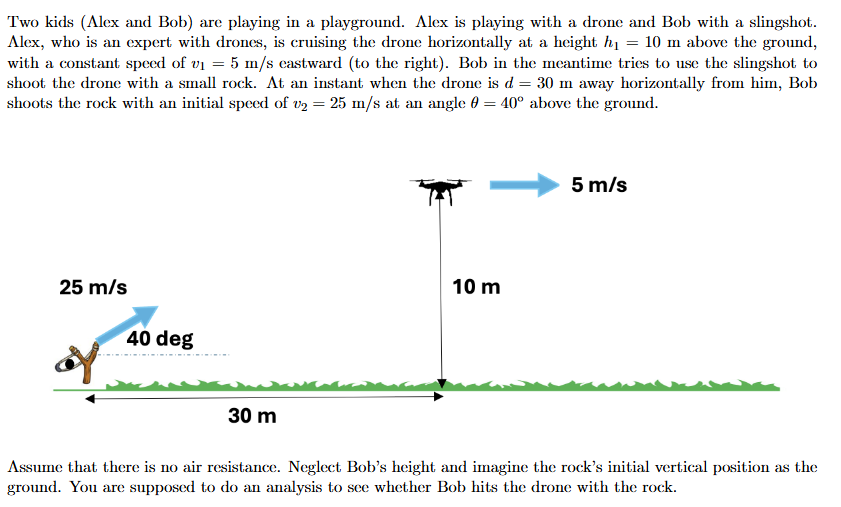
Will Bob hit the drone with the rock? Justify your answer with calculations. Hint: think about how far (horizontally) the rock and the drone travel.
first find when the rock’s x position meets the drone’s x position, then use that deltaT to calculate the rock’s y position, then compare heights to see if they hit.

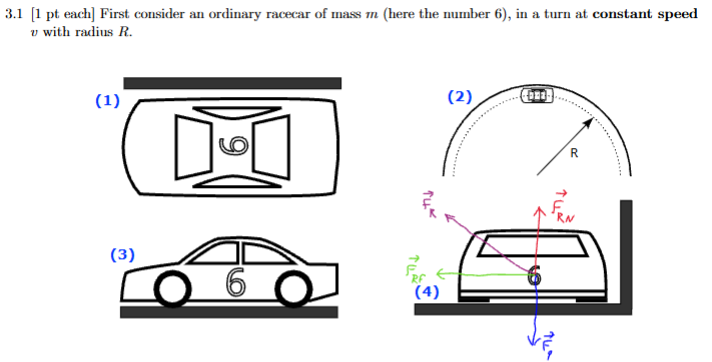
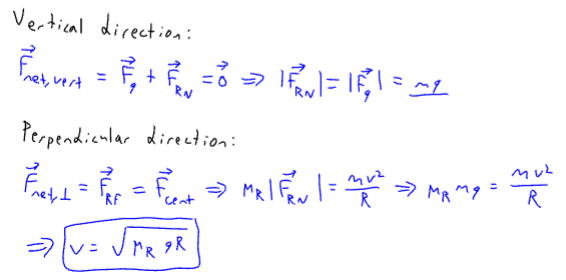
In terms of mass m, turn radius R, the constant g and the coefficient of static friction between the tires and the road, μR, what is the maximum speed that the racecar can drive?
calculate normal force using Fnet_vertical = 0 since constant speed, then find v using Fnet_perpendicular = Force from frictional component = definition of perpendicular force.
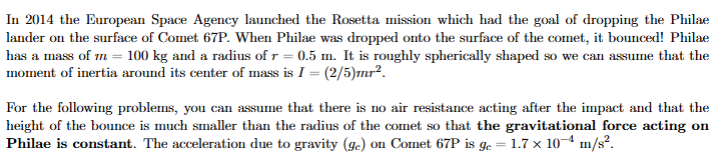
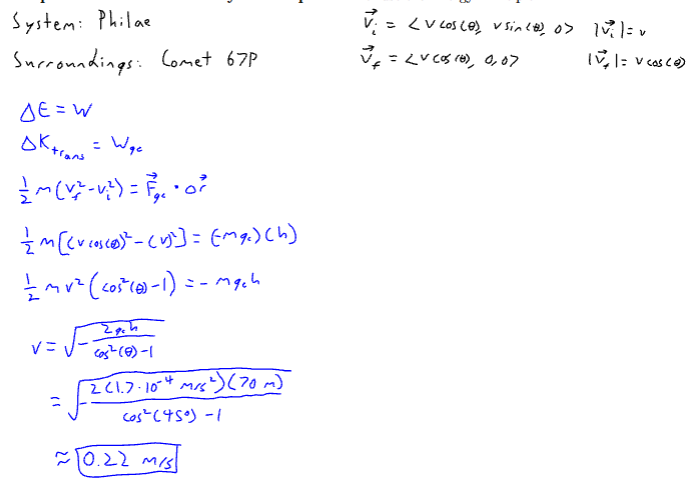
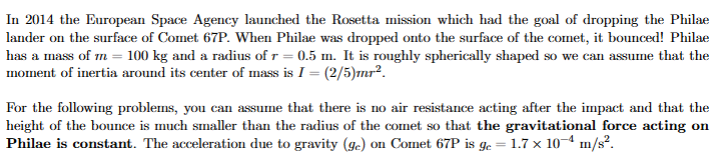
Immediately after the first collision Philae bounces off the surface of the comet at an angle of θ = 45◦. At the peak of its bounce, it is h = 70 m above the surface of the comet (that’s a big bounce!). What was the speed of Philae immediately after impact? Hint: use the Energy Principle.
deltaE = W → delta k_trans = W_gc
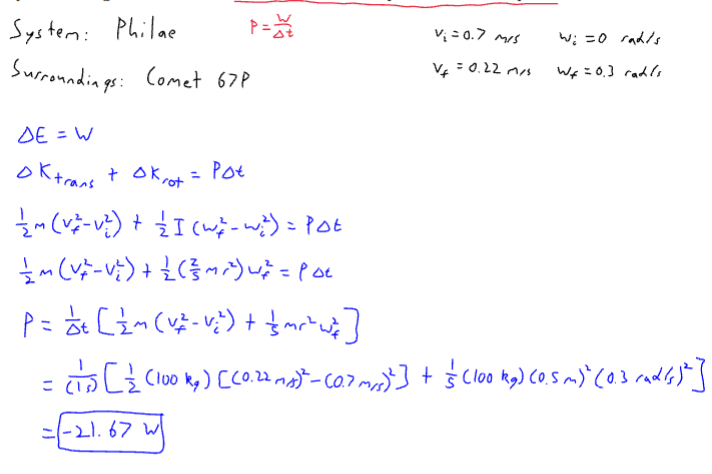
After the first impact Philae is also spinning at ω = 0.3 radians/second. Immediately before the first impact, Philae had a speed of v = 0.7 m/s and was not spinning. Philae’s damping system was in contact with the ground for ∆t = 1 second during the collision. What is the average power of its damping system during this time? Hint: remember the relationship between work and power.
damping system equal is delta k_trans + delta k_rot = p * deltaT. you are trying to find p. derived from p = w/deltaT.
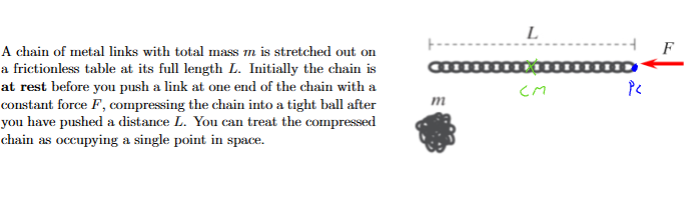
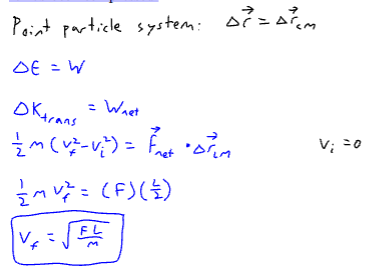
Consider the point particle (i.e. center of mass) system. What is the speed of the chain after it has been compressed?
set up point particle work system, where delta k_trans = net work.
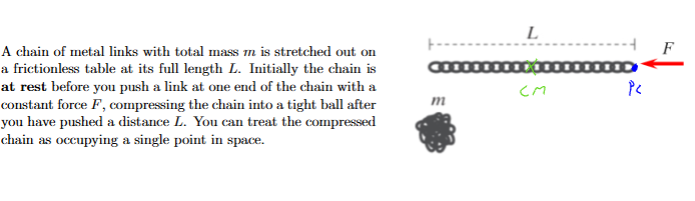
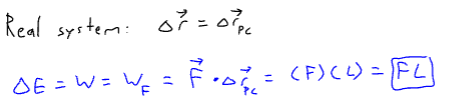
Consider the real (i.e. extended) system. What is the change in the total energy of the chain?
set up real work system, remember delta r starts from where force was applied from.
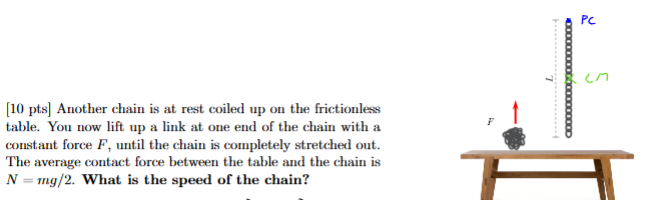
Another chain is at rest coiled up on the frictionless table. You now lift up a link at one end of the chain with a constant force F , until the chain is completely stretched out. The average contact force between the table and the chain is N = mg/2. What is the speed of the chain?
set up point particle system, remember to include contact force in net force
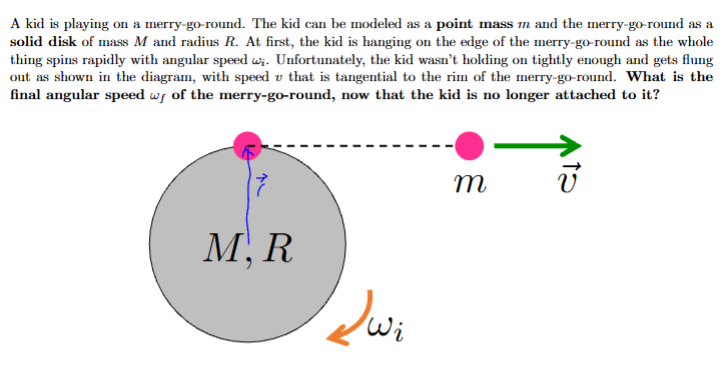
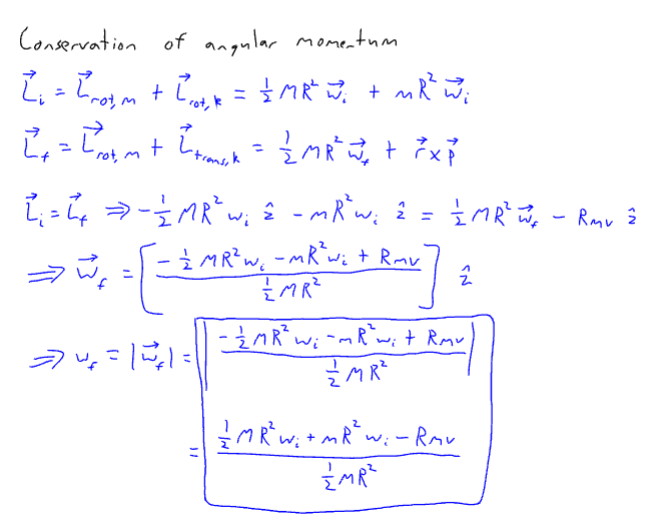
What is the final angular speed ωf of the merry-go-round, now that the kid is no longer attached to it?
set up conservation of angular momentum, initial L only has L_rots while final L has one L_rot and one L_trans
What is the direction of F⃗ net⊥?
+x hat
What is the direction of F⃗ net∥?
zero
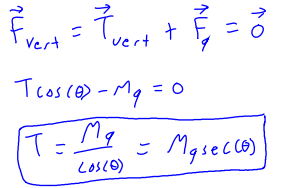
What is the magnitude of the tension in the rope, |T⃗|?
set up Fnet_y
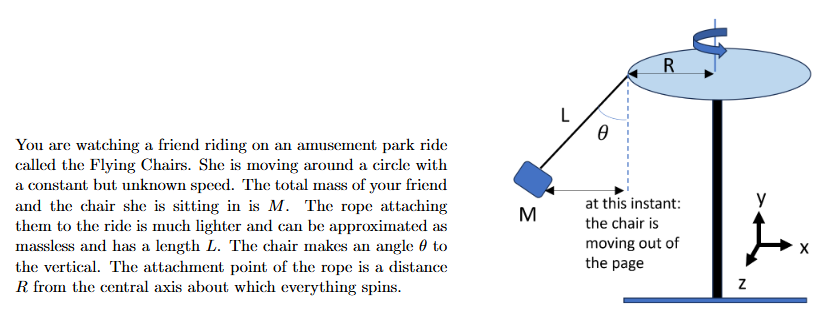
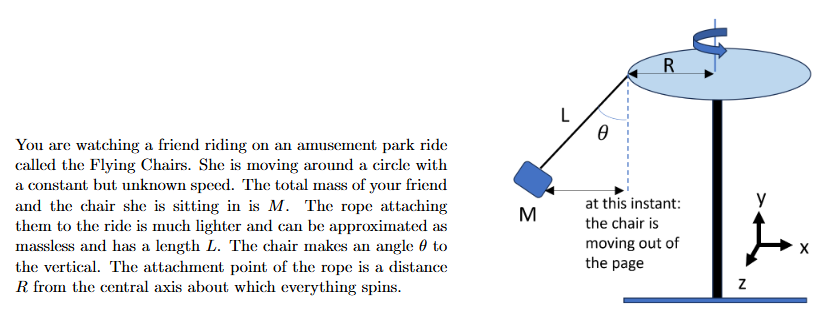
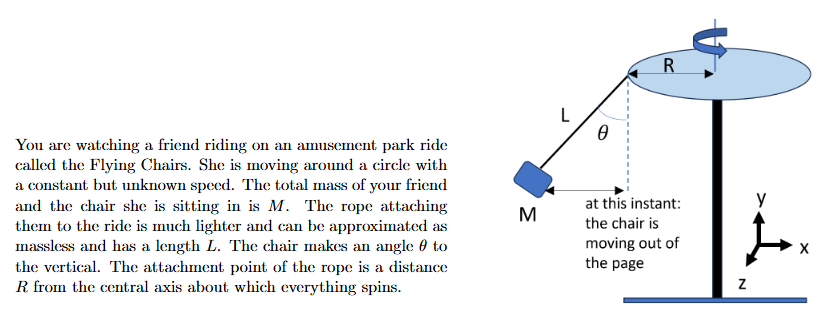
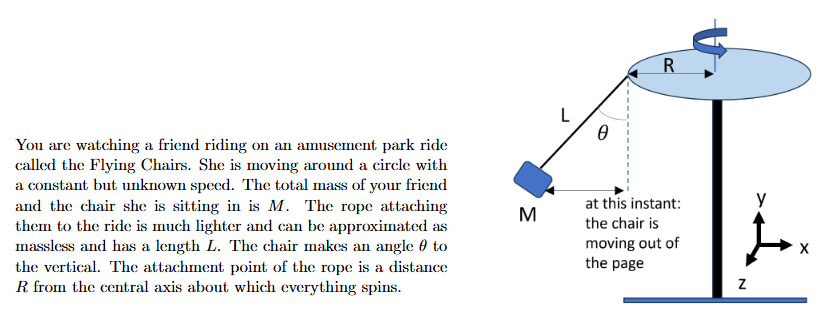
Using your knowledge of curving motion and the variables given in the schematic (R, L, θ, M) and any relevant physical constants, at what speed v is your friend (and the chair) moving?
set up Fnet_perpendicular and set it equal to its definition
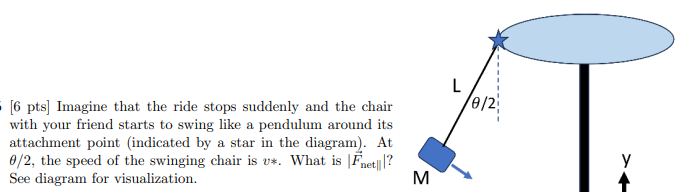
What is |F⃗ net∥ |?
only force acting on the mass now is gravitational force

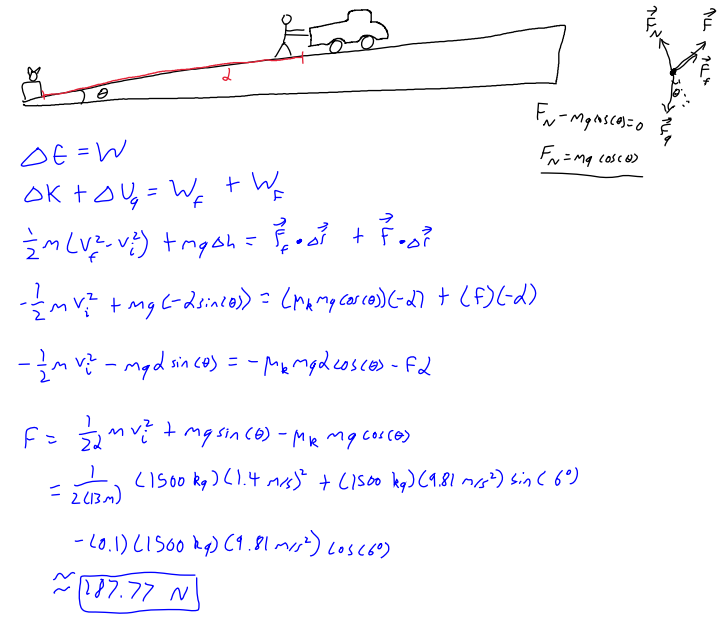
What minimum force do you need to apply in order to stop the truck before it hits the kittens, which are a distance d = 13 m away?
set up energy equation delteE = work done by non conserved forces, which in this case is work done by you + work done by friction.
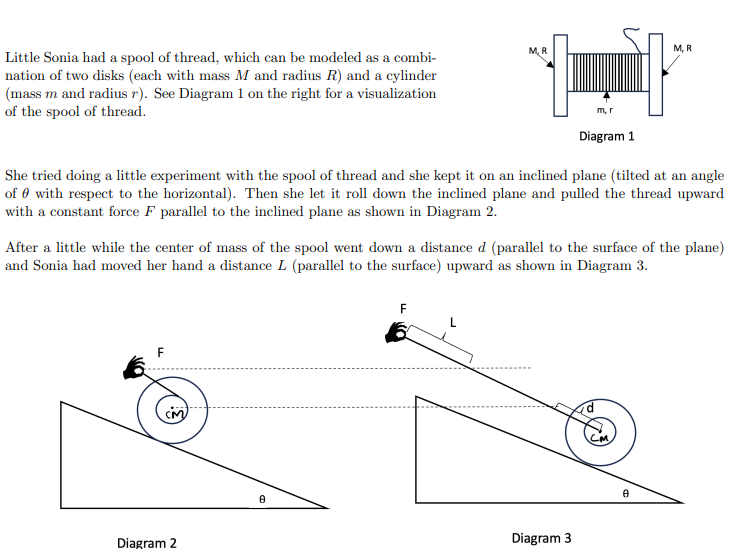
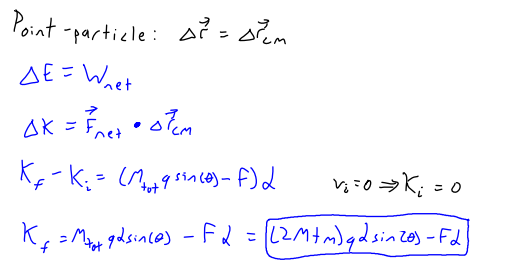
Using the point particle system, calculate the final translational kinetic energy of the system.
set up w_cm = delta k_trans
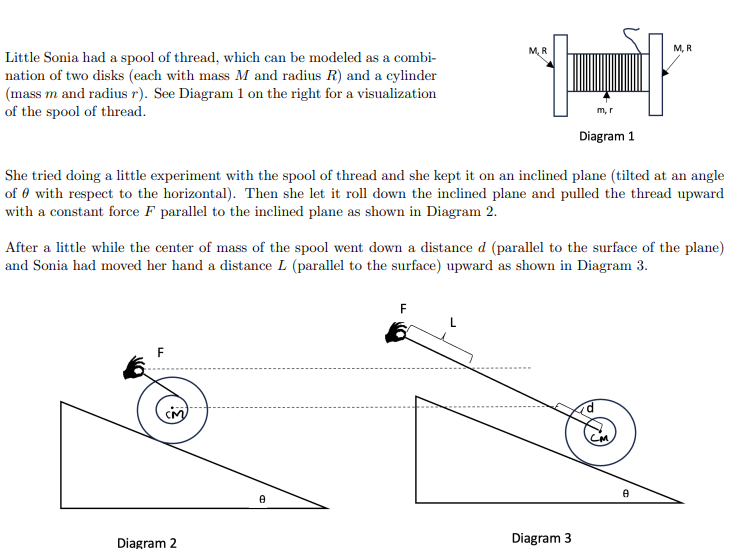
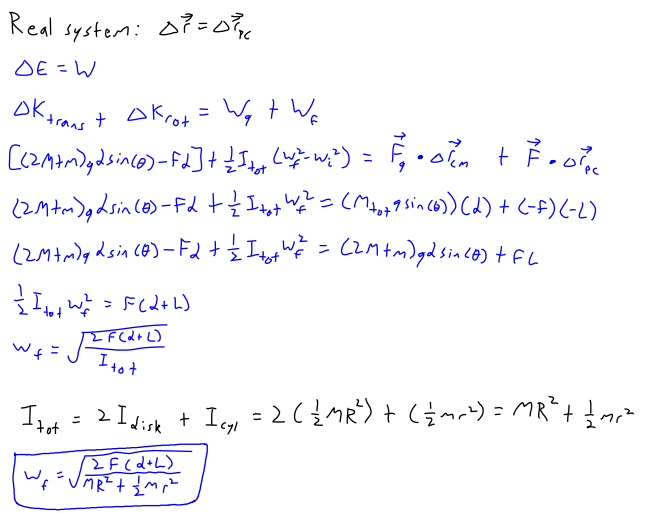
Using the real system, calculate the final rotational speed of the spool
set up energy equation delta E = work done by nbon-conserved forces, which in this case is gravity and sonia. since we can about rotational speed, set delta E to delta k_trans + delta k_rot
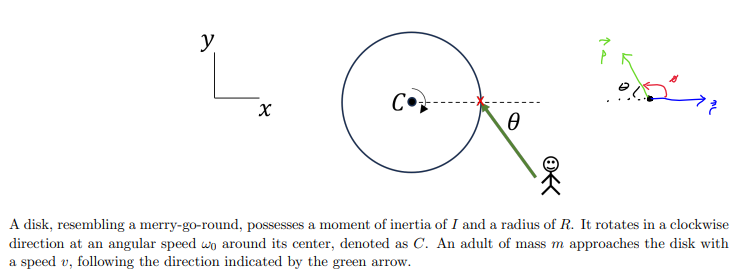
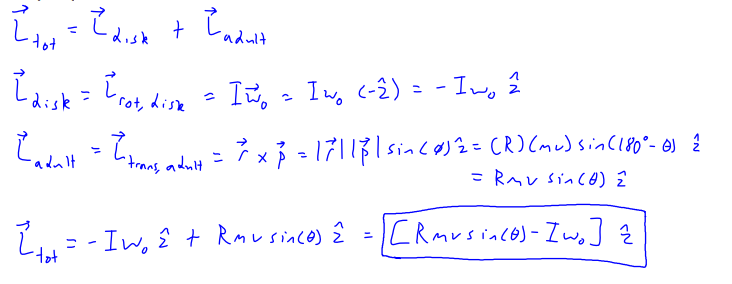
Find the total angular momentum of the disk and the adult together around the point C.
add up the angular momentums from the disk and adult. use Iw for the disk and rp for the adult.
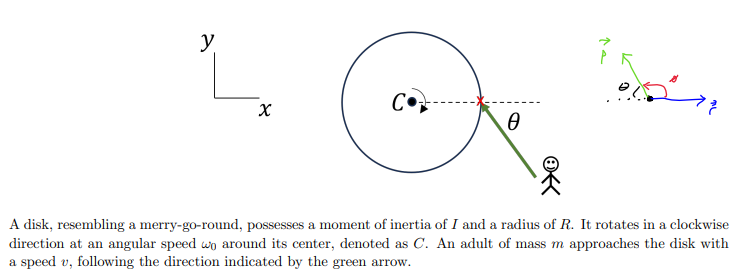
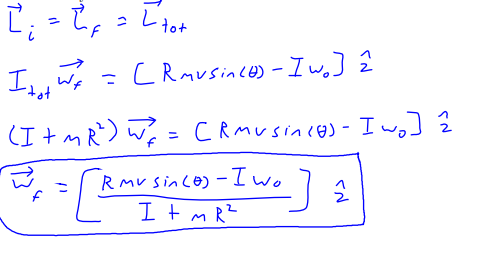
After the adult hops and lands on the marked point ‘x’ at the disk’s rim, what is the angular velocity ⃗ωf of the combined system? Express your answer as a vector using the conventional right-handed xyz coordinate system. L_total = Rmvsin(theta)-Iw_0 from a previous question.
conservation of angular momentum also includes L_i = L_f = L_total
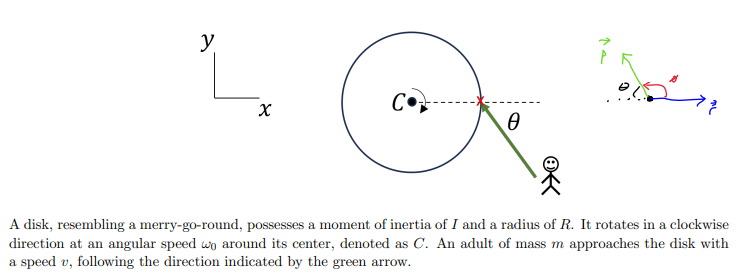
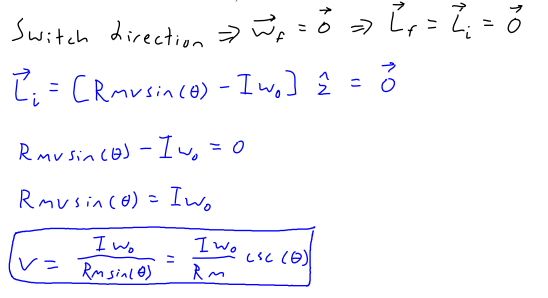
Determine the minimum speed v required to reverse the rotation direction of the disk (meaning, from clockwise to counterclockwise).
set L_i = L_total = 0 since direction is changed and needs to pass through zero in order to start reversing directions.

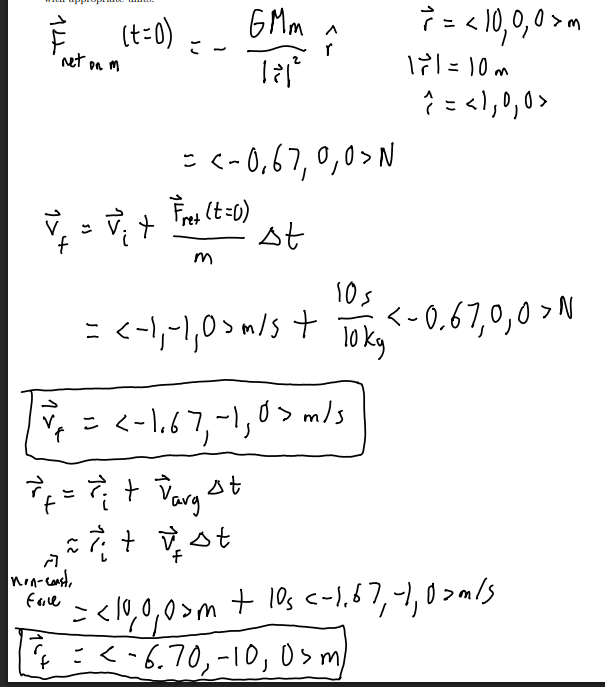
Calculate the velocity ⃗vf and position ⃗rf of the space junk a short time ∆t = 10 seconds later using one iteration step.
find the gravitational force, then velocity and position update formulas.
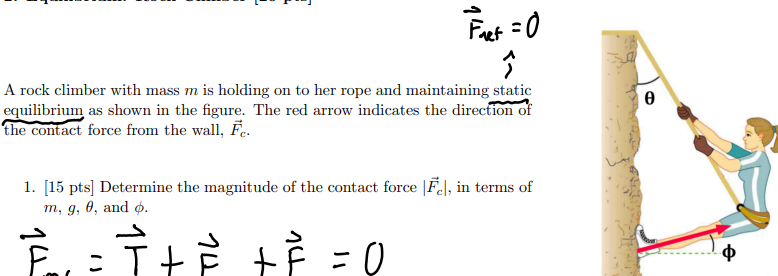
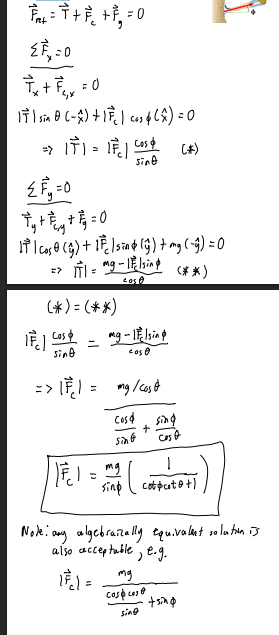
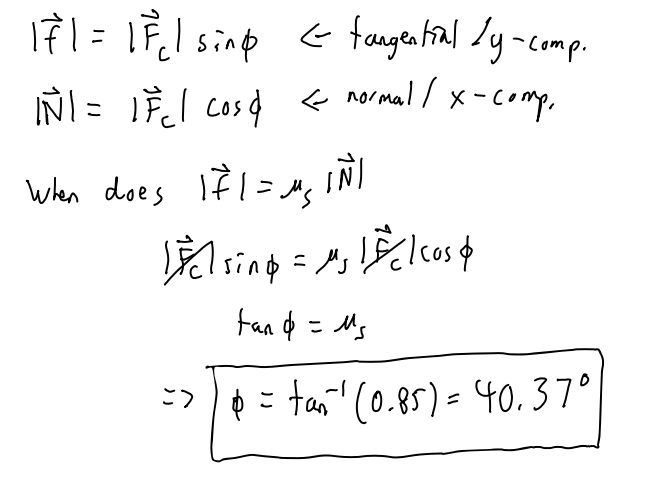
Determine the magnitude of the contact force |F⃗ c|, in terms of m, g, θ, and ϕ.
break up Fnet into x and y directions, plug in the value of T from x direction into y direction, then single out T on one side. Finally, plug in that value of T back into x direction and single out contact force.
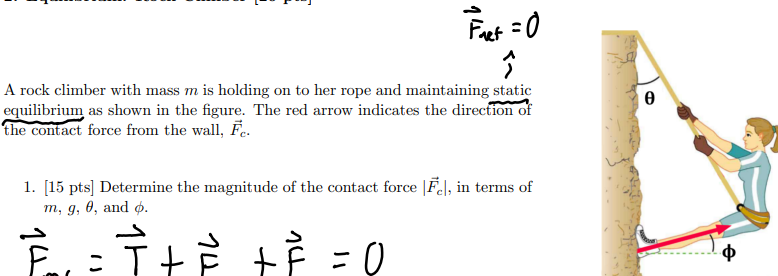
The vector contact force F⃗ c is the vector sum of the friction force ⃗f and the normal force N⃗ . The climber will start sliding when | ⃗f| > µs|N⃗ |, where µs = 0.85. What is the maximum value the angle ϕ can have before she starts sliding?
set up frictional force definition and find contact force version for frictional force and normal force, then single out theta.
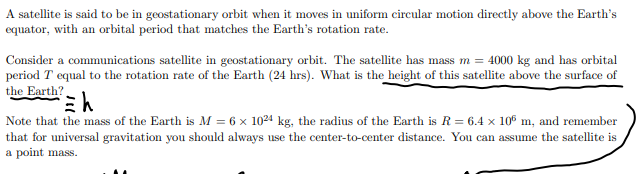
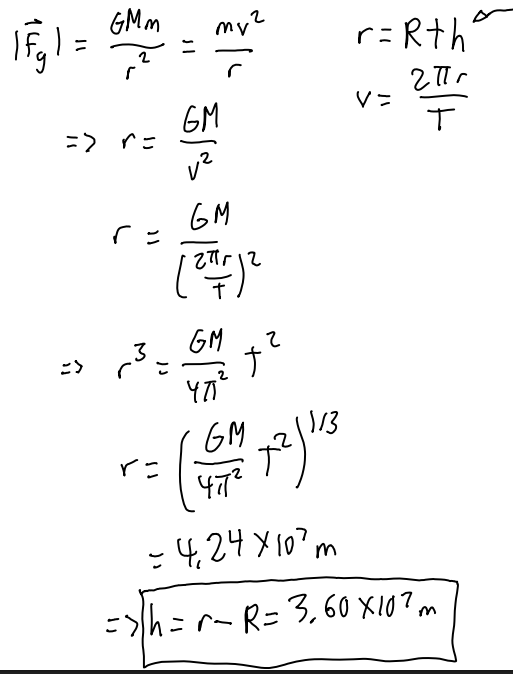
What is the height of this satellite above the surface of the Earth?
set gravitational force equal to mv²/r, also remember its from the surface so subtract radius of earth from final answer.
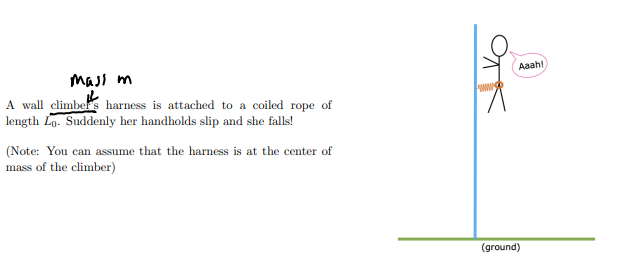
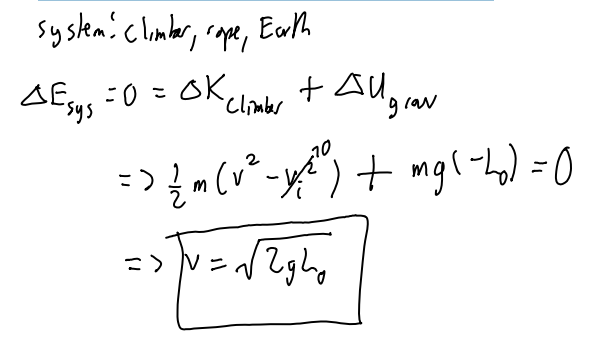
What is her speed v when she has fallen a distance just equal to the length of the rope, L0? You can assume the climber fell from rest, and that she can be modeled as a point mass.
set total delta E to energy changes of the system, K and U deltas, then find v_f.
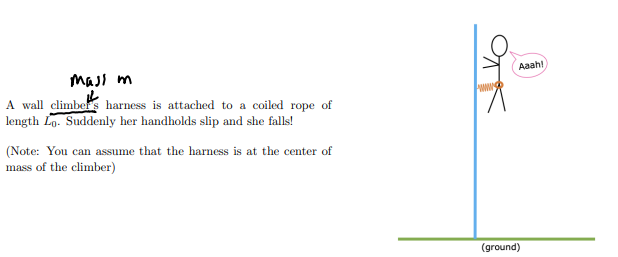
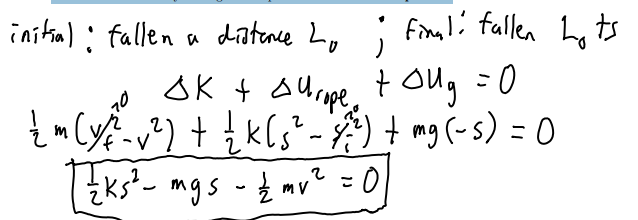
The rope actually has some elasticity, so it could be thought of as a spring with stiffness k. Use the energy principle to set up an equation that could be used to determine the additional distance s that she can fall before naturally coming to a stop. Do not solve this equation!
set delta E of the system to zero and set it to delta K,U, and spring.
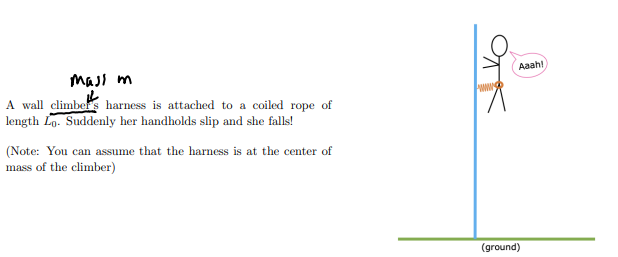
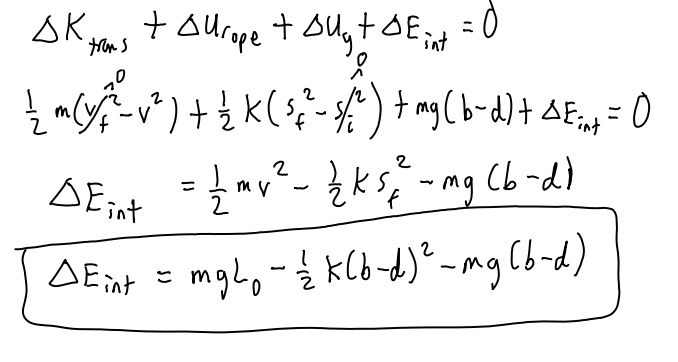
Unfortunately, the climber was originally at a height h = L0 + d above the ground, where d is the distance between her feet and the location of the harness (at her center of mass), so she hits the ground at the speed v you found in part 1 (ouch!). After her feet touch the ground, she bends her knees and crouches to minimize the impact. When she comes to a rest after crouching, her center of mass is at height b above the ground (note: b < d). What is the change in internal energy of the climber, from the moment her feet touch the ground until the moment when she comes to rest crouching? Hint: real system.
set total delta E of the system to delta K,U,spring,and internal energy, then single out delta int on one side. no external energy so all of these energy changes equal to zero.
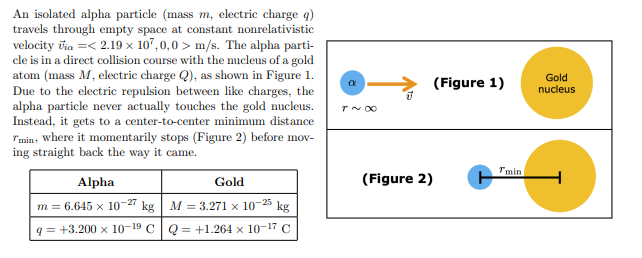
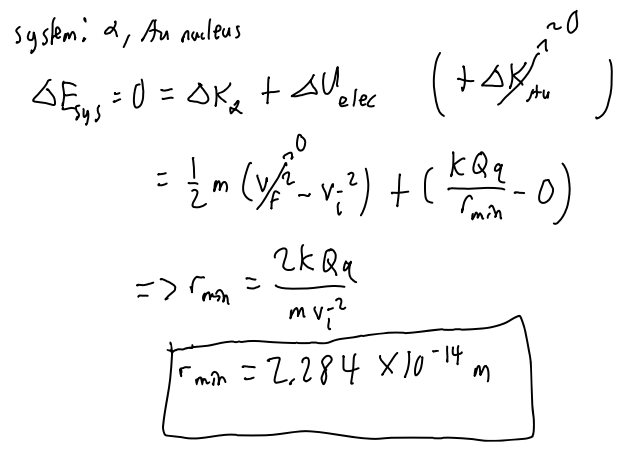
Use the energy principle to determine what is the distance rmin. You can assume the gravitational interaction between the alpha and the gold is negligible. Use the numerical values in the table above for m, q, M, and Q. All your calculations must keep 3 decimal places.
set total energy of the system to delta K and potential electrical and set it to zero. single out r from final potential electrical.
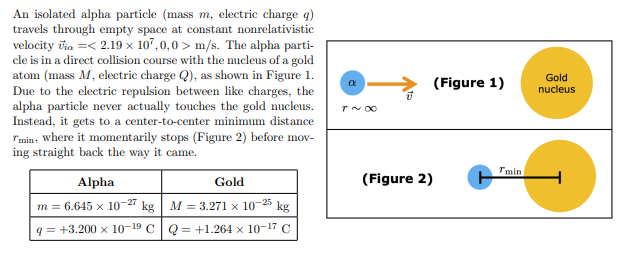
If the gold nucleus started out motionless, and the final velocity of the alpha particle after the collision is ⃗vfα =< −2.56 × 106 , 0, 0 > m/s, what is the final velocity of the gold nucleus after the collision? Keep 3 decimal places in all your calculations. Your answer should be a vector with correct units.
conservation of momentum.
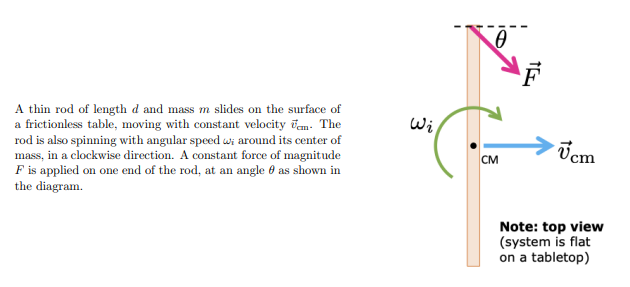
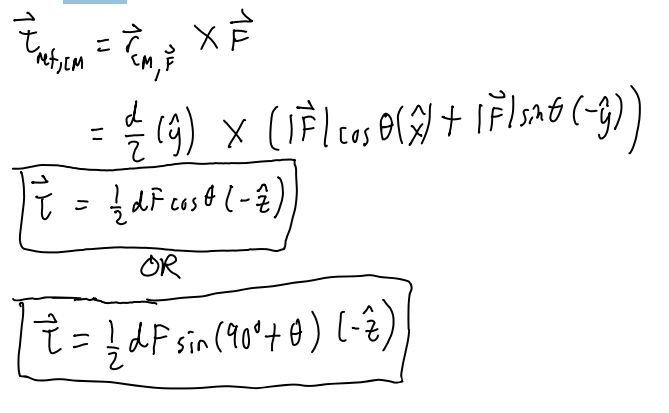
What is the net torque ⃗τ acting on the rod, with respect to its center of mass? Your answer must be a vector.
torque definition.
Determine what is the angular velocity ⃗ωf of the rod a short amount of time ∆t later. Your answer must be a vector.
angular momentum update formula and set L = Iw to find w_f.
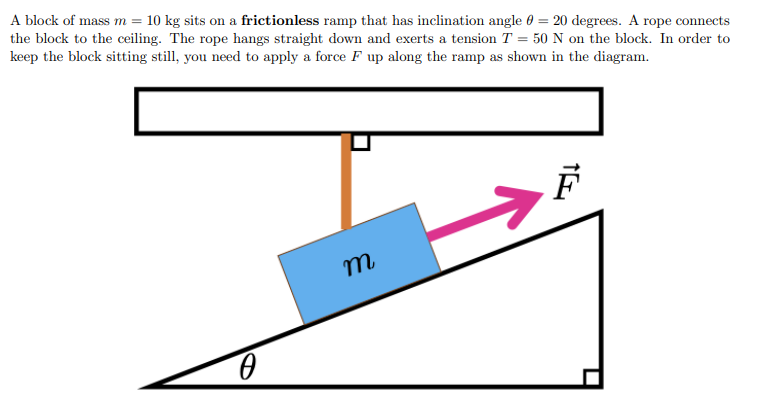
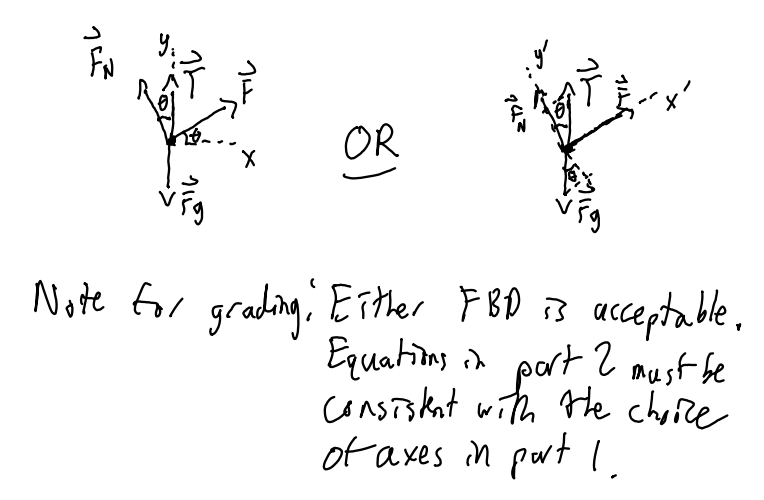
Draw a free-body-diagram showing all the forces acting on the block. To receive full credit, your diagram must have correctly labeled x and y axes, forces, and angles.
normal pointing up at an angle, force pointing right at an angle, gravity pointing directly down, tension pointing direction up.
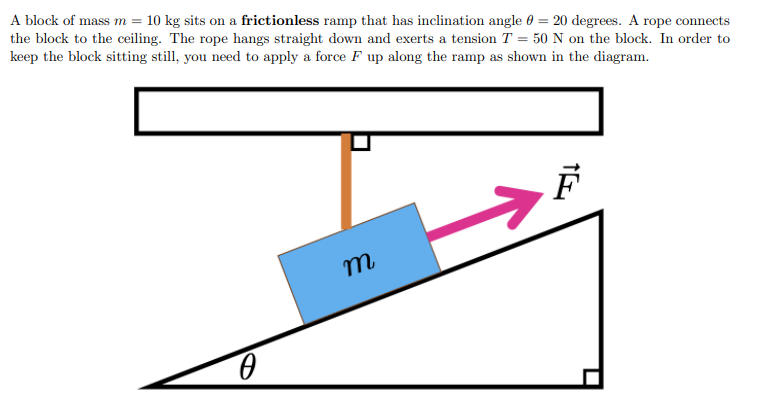
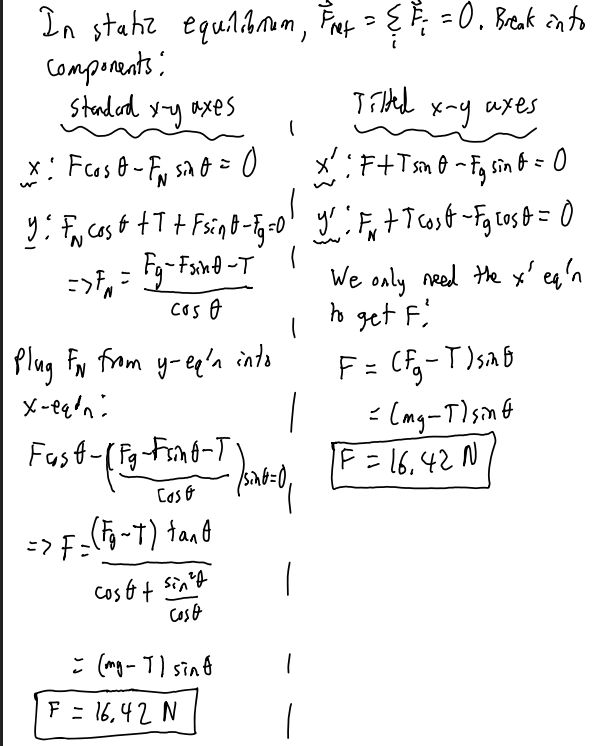
Determine the magnitude of the force F that you need to apply to keep the block at rest
break up Fnet into x and y directions, set both to zero.
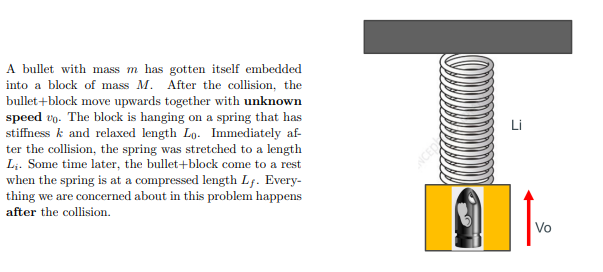
Consider the bullet, the block, and the spring to be the system, and the Earth to be the surroundings. What is the total work being done on the system, from the moment just after the collision to the moment when the system comes to a rest?
set W_total to Fd, where F is Fg only.
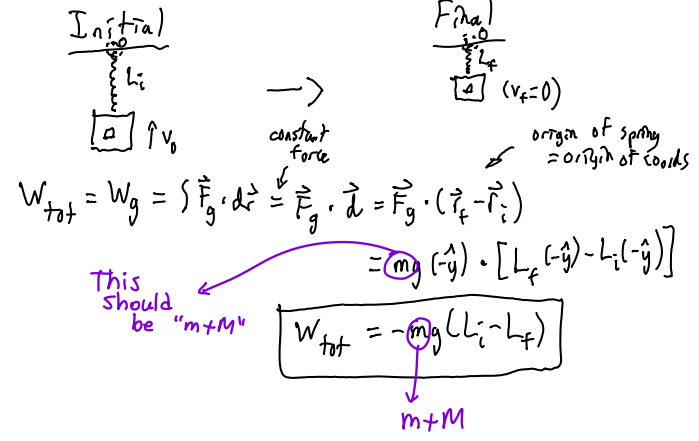
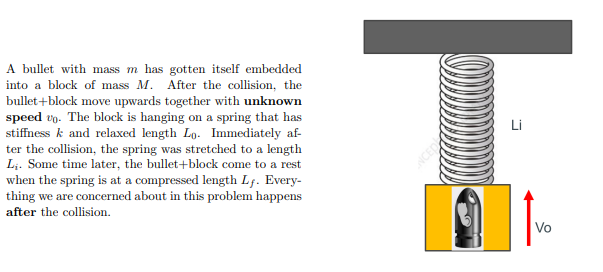
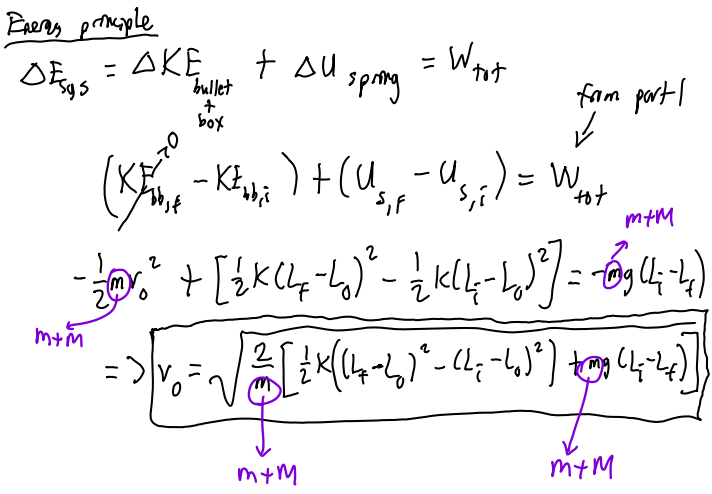
What is the unknown speed v0? Use the same system and surroundings from Part 1. W_total = -mg(L_f-L_i) from a previous problem.
energy principle where delta E (delta K from box and bullet system and delta U from spring) equals to W_total.
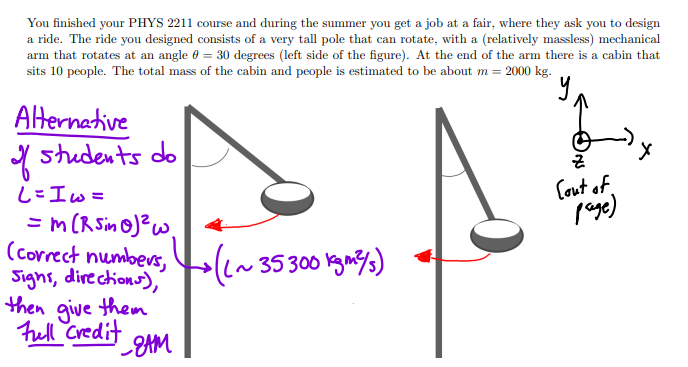
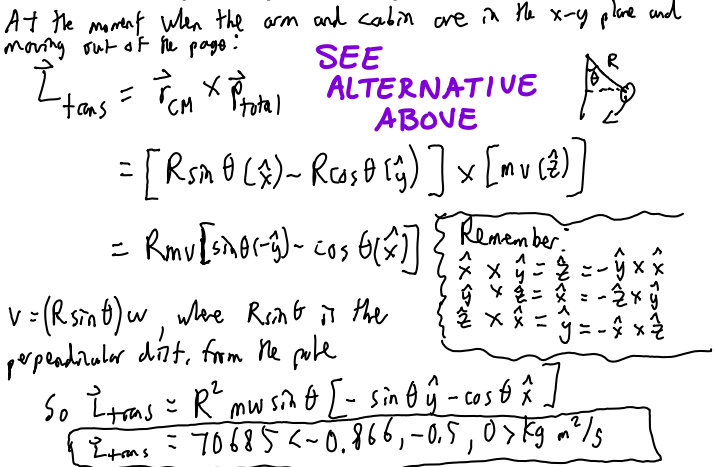
If the length of the arm is R = 15 m, and the pole rotates at an angular speed of ! = 2⇡/20 rads/sec, what is the translational angular momentum of the cabin with respect to the point where the mechanical arm attaches to the pole? You can pretend the cabin is a point mass.
set up L_trans = r_cm times p_total
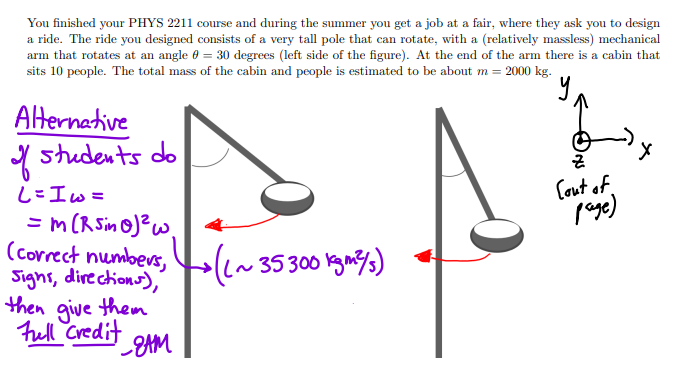
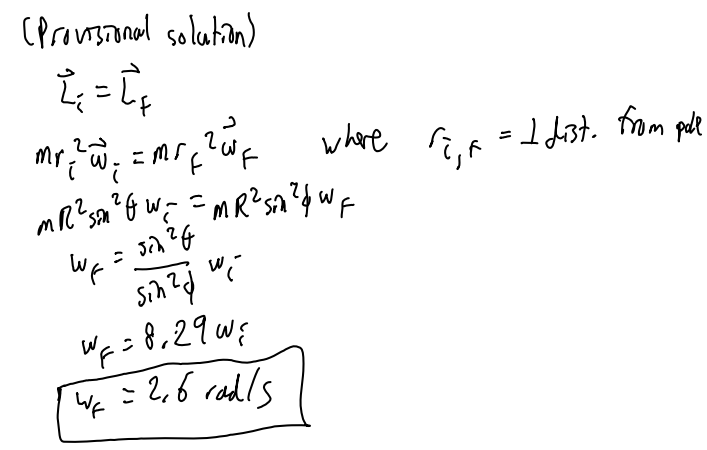
Assume the ride conserves angular momentum. If the angle between the arm and the pole were = 10 degrees instead (right side of the figure), what would be the angular speed of the pole?
conservation of angular momentum. where L = Iw.
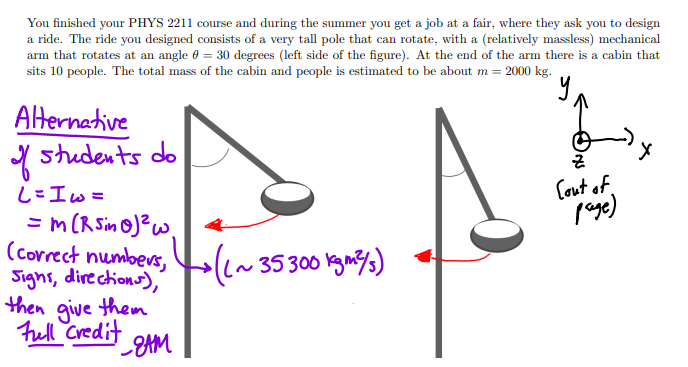
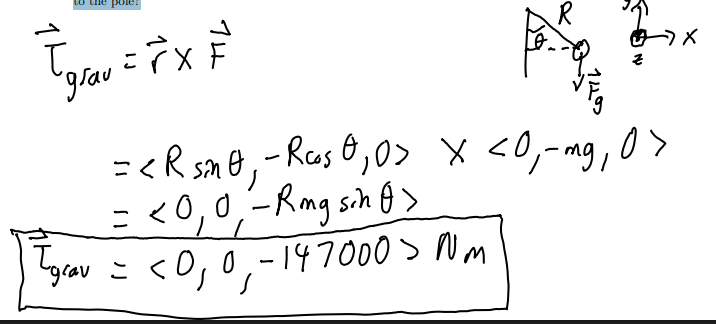
In the original version (left side of the figure), what is the magnitude and direction of the torque exerted by the gravitational force on the cabin, with respect to the point where the mechanical arm attaches to the pole?
definition of torque.
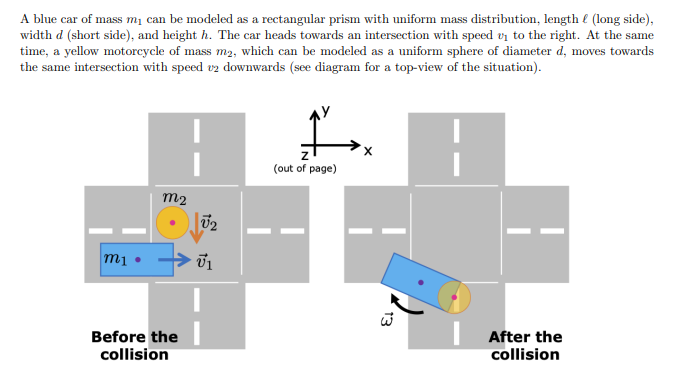
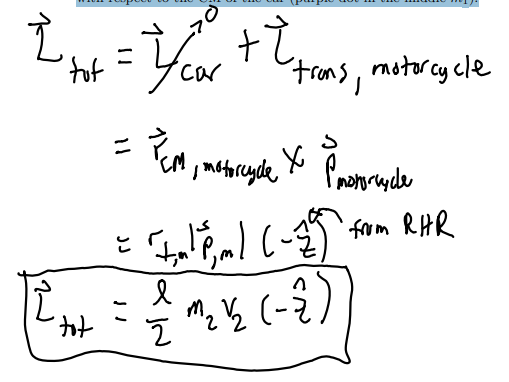
Right before the collision, the center of mass (CM) of the motorcycle (pink dot in the middle of m2) is aligned with the front end of the car (in other words, the CM of the motorcycle is along the same vertical line as the front end of the car). Determine the total angular momentum of the car+motorcycle system with respect to the CM of the car (purple dot in the middle m1).
definition of L_total = all Ls in the system
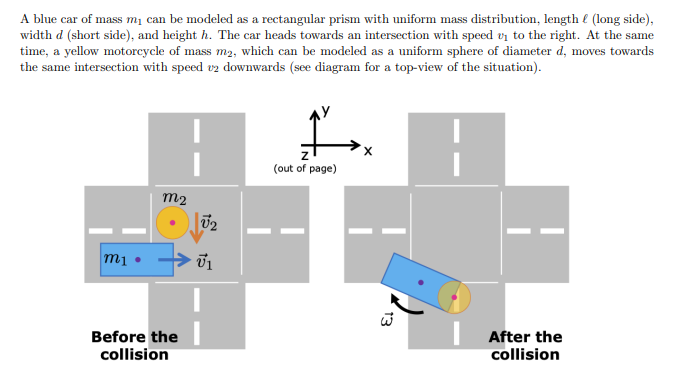
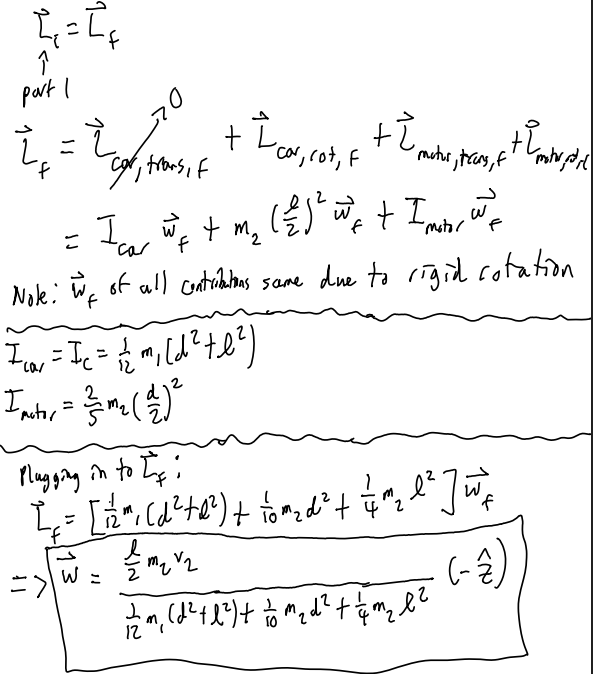
In this maximally inelastic collision, the motorcycle embeds itself into the front end of the car (see diagram). Determine the angular velocity ~! (magnitude and direction) of the combined car+motorcycle system immediately after the collision, with respect to the CM of the car. The moment of inertia of the car is Ic = (1/12)m1(d2 + `2). L_total = (l/2)m_2*v_2*-z_hat from a previous question.
conservation of angular momentum, single out w_f on one side.

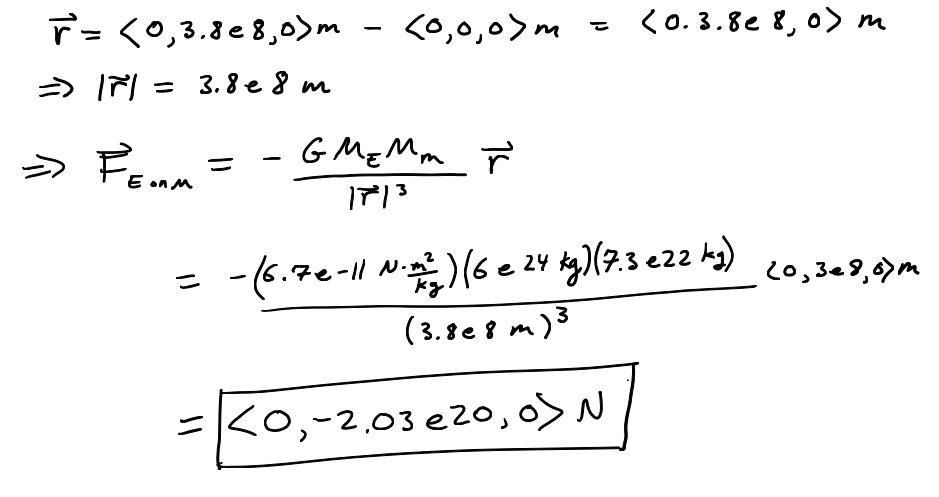
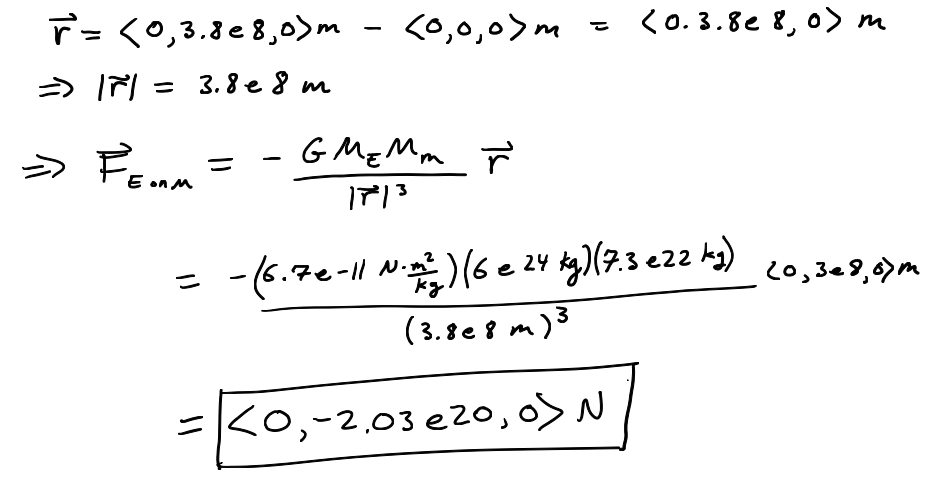
At t = 0, you can find the Earth at the origin and the Moon at location ~rm =< 0, 3.8 × 108 , 0 > m. What is the net vector force on the Moon due to the Earth?
gravitational force formula.

At t = 0 the Moon moves with velocity < −1 × 103 , 0, 0 > m/s. Determine the position of the Moon after a time ∆t = 1 hour.
velocity and position update formulas.
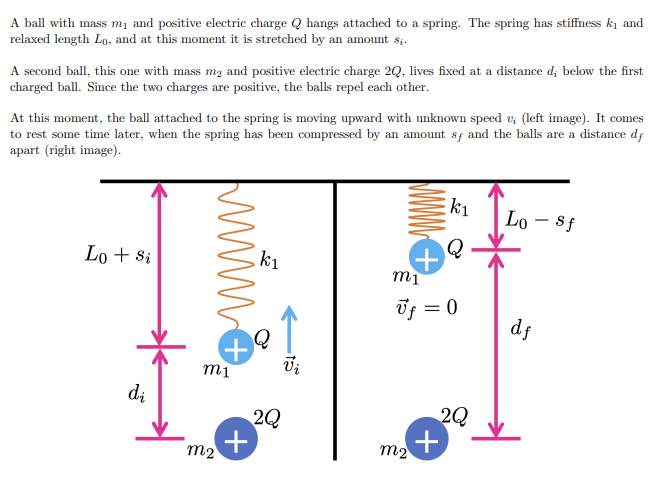
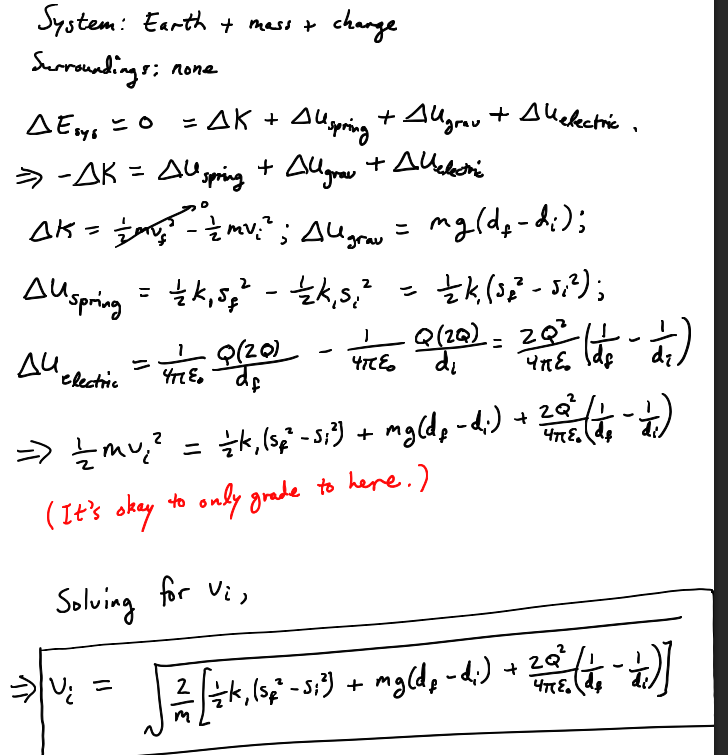
Use the energy principle to determine the unknown speed vi . Hints: (1) this is happening near the surface of the Earth; (2) the ONLY interaction you can ignore here is the gravitational attraction between the two balls; (3) putting all the things in the system means you do not have to calculate work due to the surroundings.
delta E of the system = 0. single out delta K on one side which also singles out v_i.
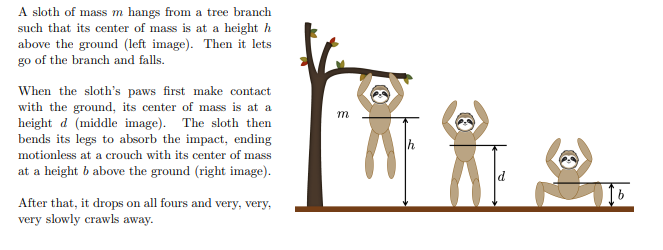
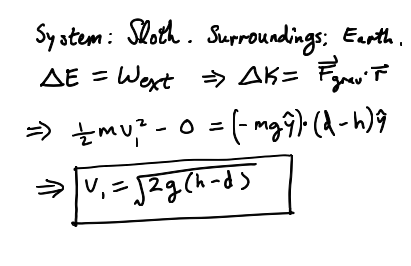
Use the energy principle on the center-of-mass (point-particle) system to determine the speed of the sloth at the moment just before its paws touch the ground.
delta E = w_external = F_gravity x r.
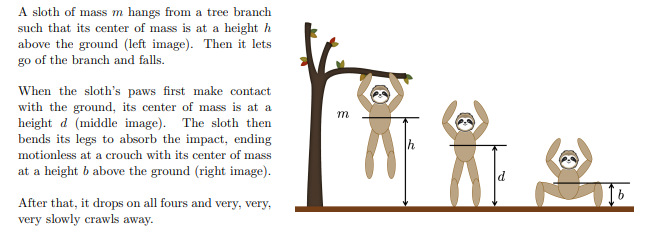
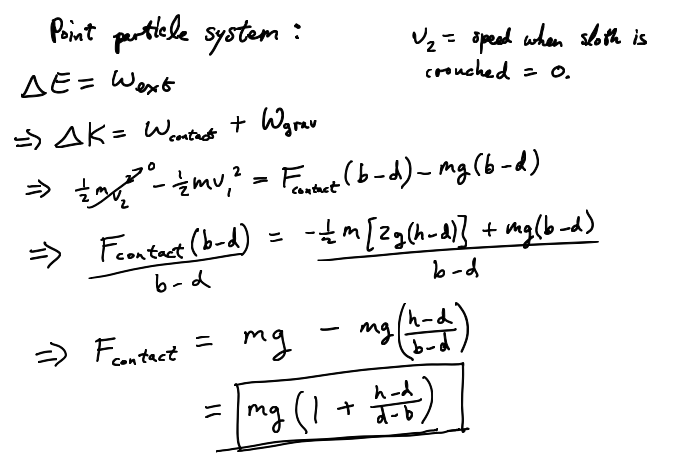
Assuming that the contact force from the ground on the sloth’s paws is constant, use the energy principle on the center-of-mass (point-particle) system to determine the magnitude of this contact force. v_i = sqrt(2g(h-d)) from a previous problem.
point particle system where delta E = delta K = work from external forces = w_contact + w_gravity. single out contact force on one side.
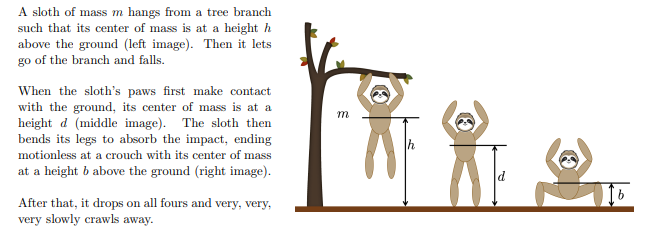
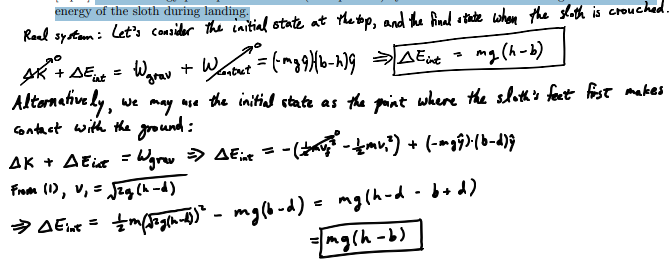
Use the energy principle on the real (multiparticle) system to determine the change in the internal energy of the sloth during landing.
just understand that delta E_internal = work done by gravity by setting up real work system.
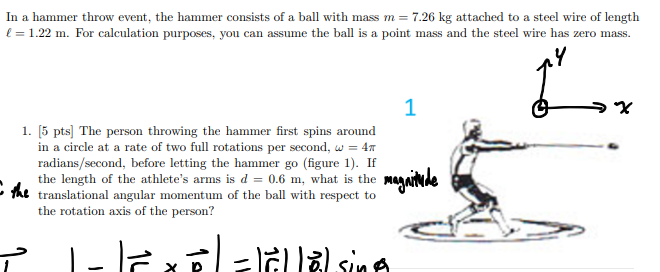
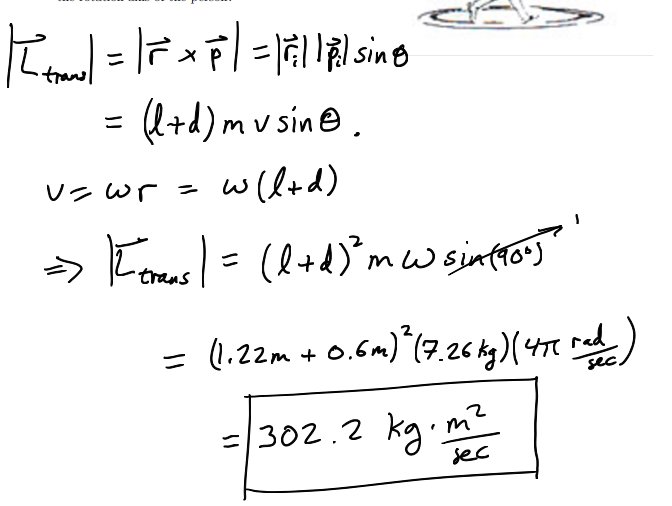
The person throwing the hammer first spins around in a circle at a rate of two full rotations per second, ω = 4π radians/second, before letting the hammer go (figure 1). If the length of the athlete’s arms is d = 0.6 m, what is the translational angular momentum of the ball with respect to the rotation axis of the person?
definition of L = rp. also know that v = wr.
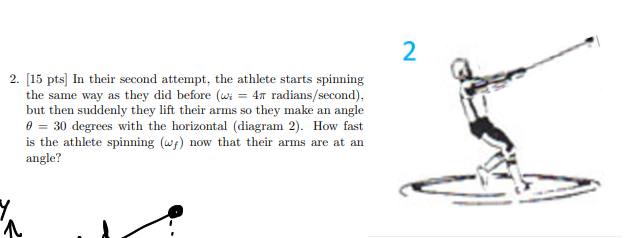
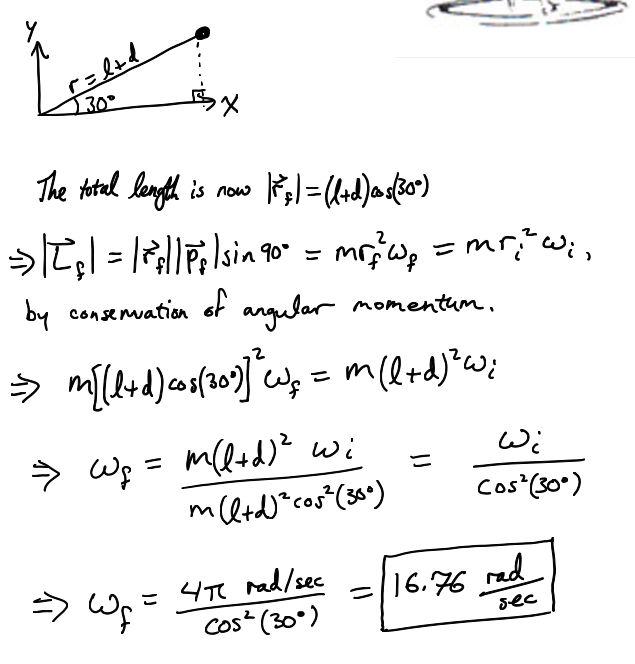
In their second attempt, the athlete starts spinning the same way as they did before (ωi = 4π radians/second), but then suddenly they lift their arms so they make an angle θ = 30 degrees with the horizontal (diagram 2). How fast is the athlete spinning (ωf ) now that their arms are at an angle?
conservation of angular momentum.
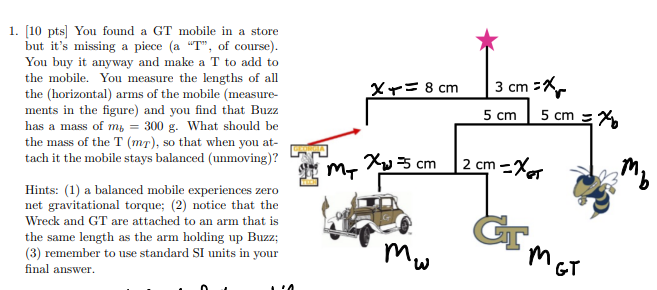
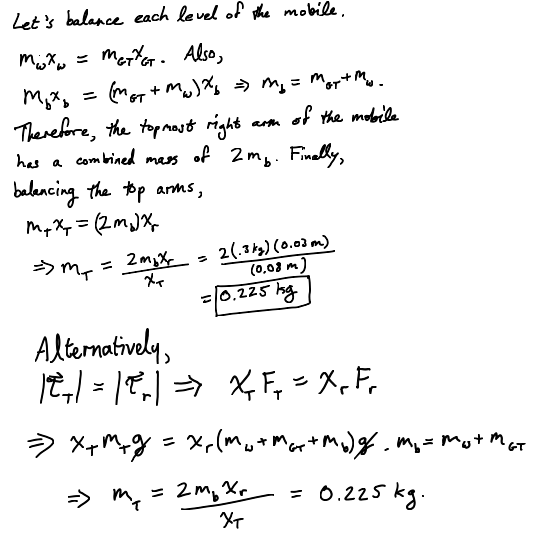
You found a GT mobile in a store but it’s missing a piece (a “T”, of course). You buy it anyway and make a T to add to the mobile. You measure the lengths of all the (horizontal) arms of the mobile (measurements in the figure) and you find that Buzz has a mass of mb = 300 g. What should be the mass of the T (mT ), so that when you attach it the mobile stays balanced (unmoving)? Hints: (1) a balanced mobile experiences zero net gravitational torque; (2) notice that the Wreck and GT are attached to an arm that is the same length as the arm holding up Buzz; (3) remember to use standard SI units in your final answer.
conservation of torque where torque from the T is equal to the torque from the right side of the scale.
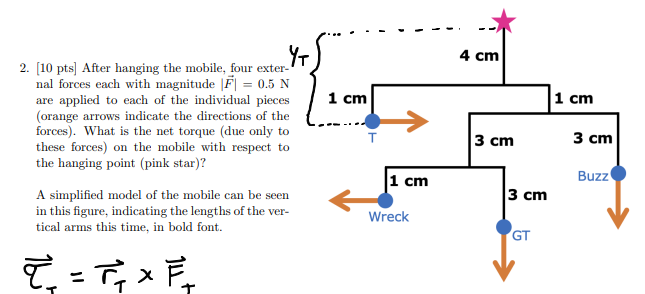
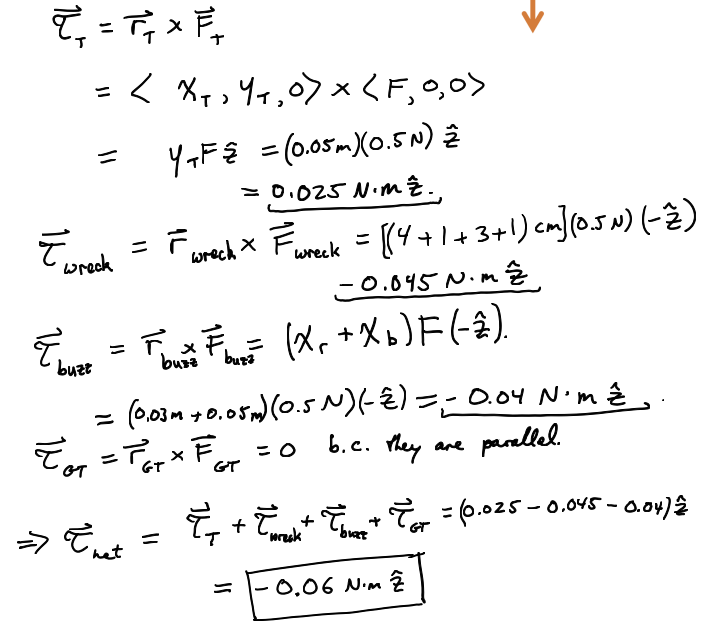
After hanging the mobile, four external forces each with magnitude |F~ | = 0.5 N are applied to each of the individual pieces (orange arrows indicate the directions of the forces). What is the net torque (due only to these forces) on the mobile with respect to the hanging point (pink star)? A simplified model of the mobile can be seen in this figure, indicating the lengths of the vertical arms this time, in bold font
definition of torque to find all torques, then add them all up to find net torque.

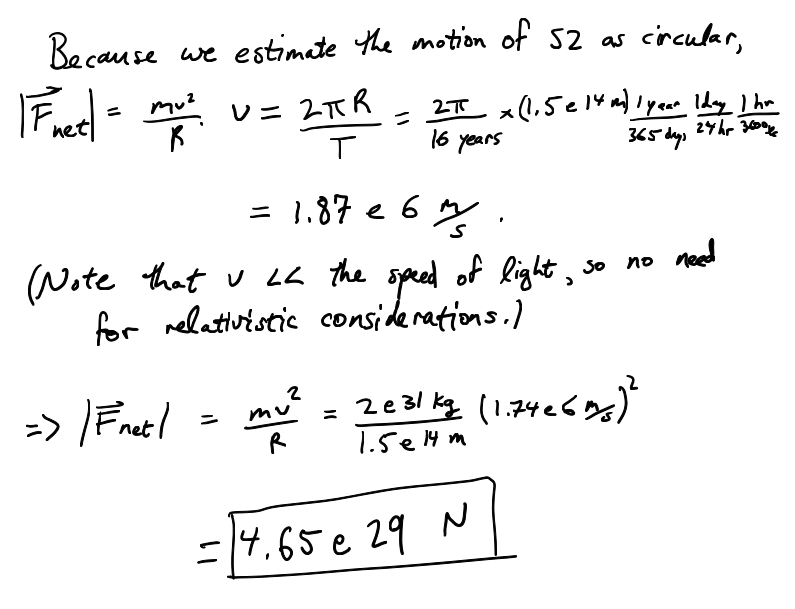
Determine the magnitude of the net force acting on S2 at any point in its circular orbit around Sagittarius A*. You can assume that S2 moves at a constant rate throughout its orbit.
since its circular motion, we set gravitational force = circular motion (mv²/R) where v = 2piR/T

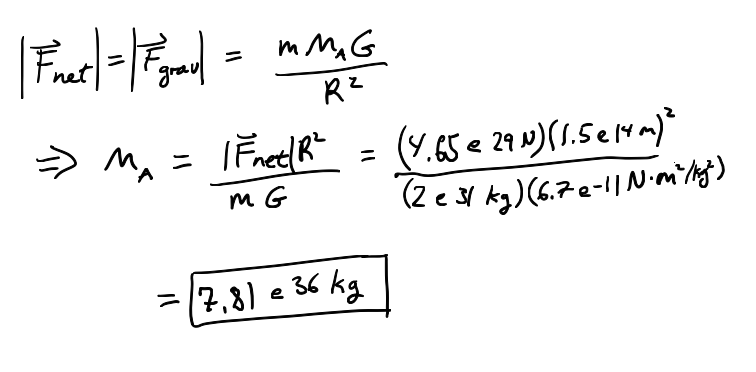
Under the assumption that S2’s orbit is a circle, what is the mass of Sagittarius A*? Fnet = 4.65e29 N from a previous problem.
gravitational force formula = Fnet.

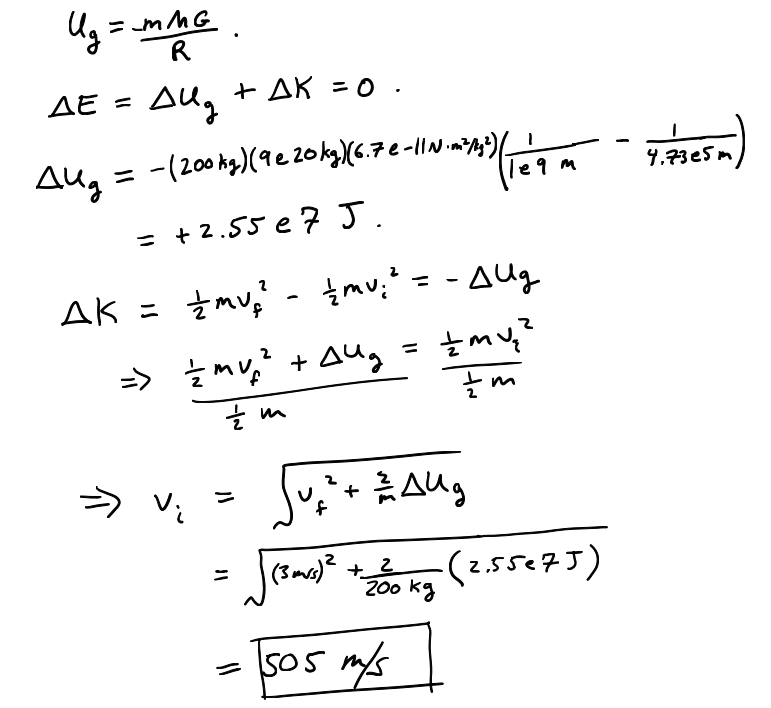
Tycho engineers need to launch a 200 kg package of raw materials from Ceres to Anderson Station. How fast does the package need to be launched, if it needs to have a speed of 3 m/s when it arrives at Anderson?
delta E = 0, single out v_i on one side.

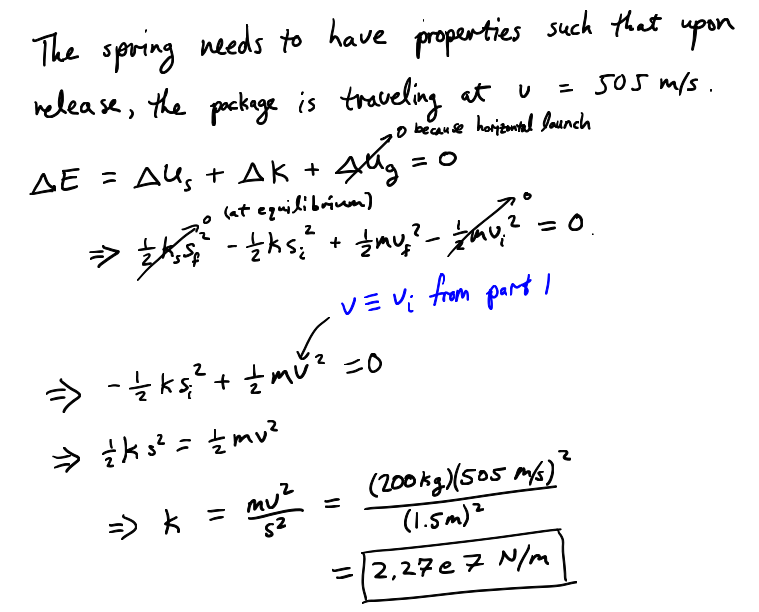
To send the package, Tycho engineers built a horizontal spring-loaded launching mechanism on Ceres. When the apparatus is ready to engage, the package is at rest and the spring is compressed a distance of 1.5 m. What is the sti↵ness of the spring? v = 505 m/s from a previous problem.
delta E = 0, include delta K,U_gravity ,and U_spring, then single out k on one side.
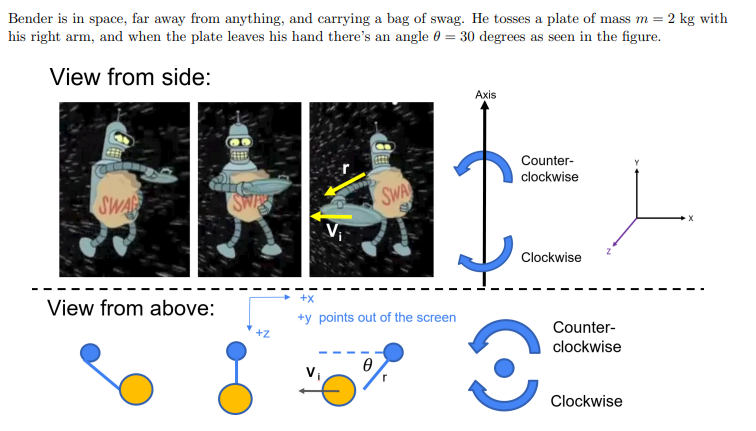
Which direction will Bender rotate after tossing the plate, clockwise or counterclockwise? Explain using the angular momentum principle and the right hand rule.
conservation of momentum where L_i = 0.
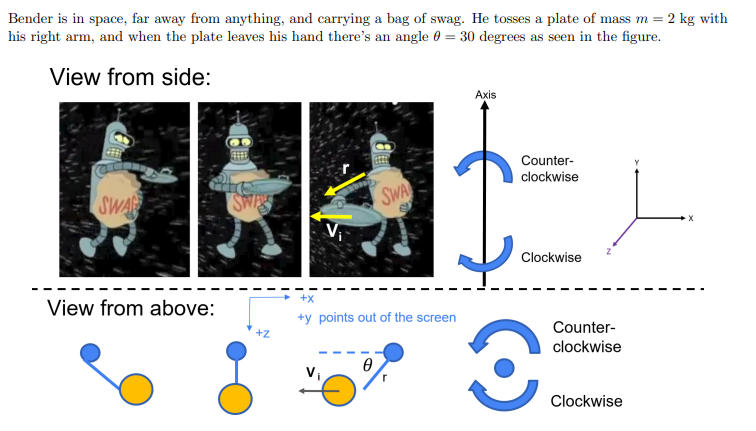
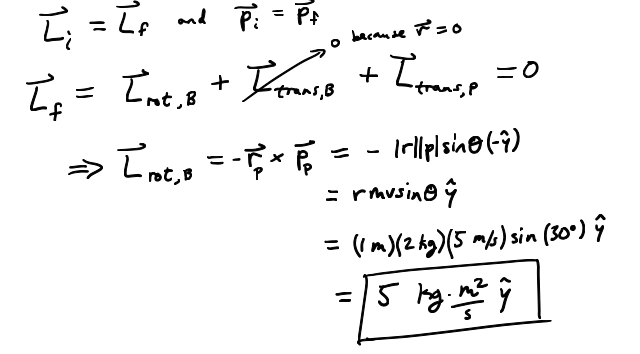
If the speed of the plate is 5 m/s when Bender tosses it, and Bender’s fully-extended arm is one meter long, what would be Bender’s final angular momentum? Note that Bender’s moment of inertia is 150 kg m2, and that there’s an angle involved (see bottom part of the figure).
conservation of angular momentum where L_i = 0, so you can single out L_rot on one side.
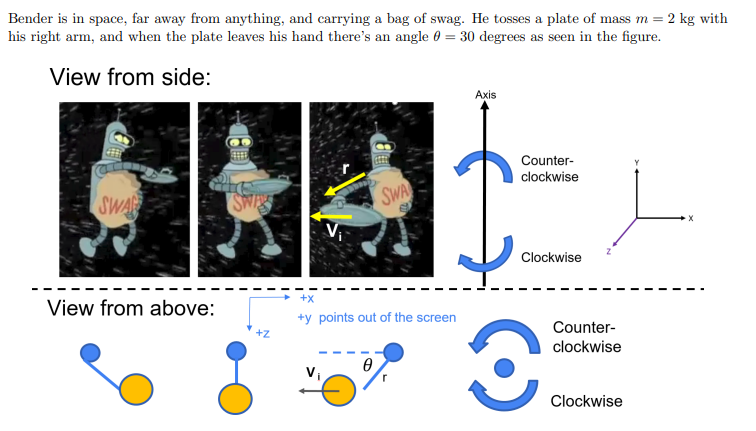
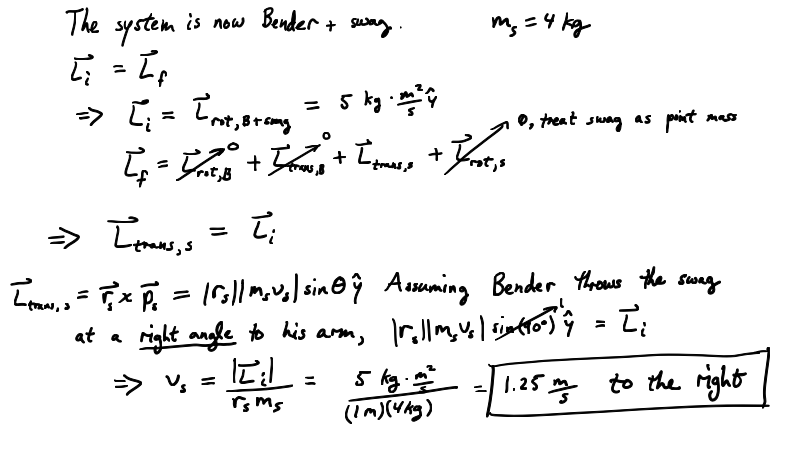
Bender’s getting dizzy and wants to stop spinning now. The remaining swag in the bag has a mass of 4 kg. How fast and in which direction should he toss the remaining swag so that he stops rotating altogether?
conservation of angular momentum where L_i = 5 from a previous problem. swag has no angular momentum since its a point mass.
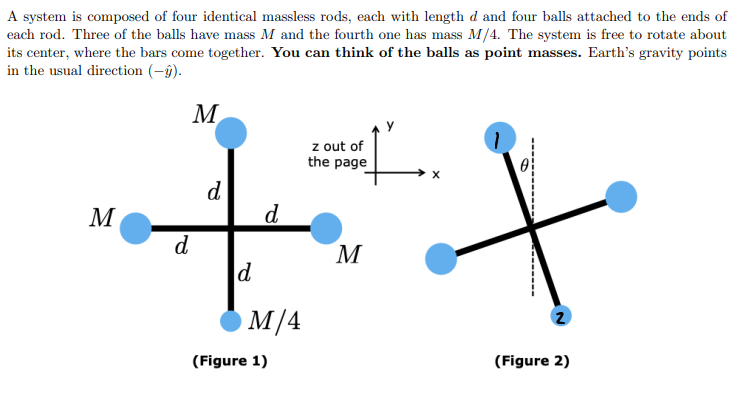
What is the net torque on the system as shown in Figure 1, where the rods are oriented along the x and y axes?
zero since horizontal bar’s torques exactly cancel.
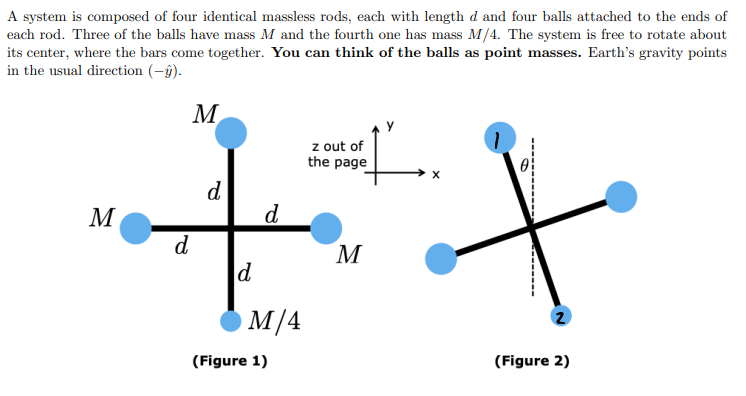
You hold the system at rest after rotating it by a small angle theta counterclockwise (as shown in Figure 2). Then you let go. What will happen to the system now? Use the angular momentum principle to justify your answer.
tall ball’s torque is greater than the bottom ball, so it continues rotating cc.

Determine the final angular momentum of the system T seconds after letting it go from the initial configuration in Figure 2.
angular momentum update formula. remember horizontal torque’s cancel out when finding net torque.