Data Structures & Complexity
1/36
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
37 Terms
String Matching Algorithm
Algorithm to determine if a pattern (substring) of length m exists in a given text of length n. Finds valid shifts.
Has a naive algorithm which has O((n-m-1) * m) running time
Has KMP algorithm which has O(m) preprocessing and O(n) running time.
x is a prefix of y
x ⊑ y
x is a suffix of y
x ⊒ y
Suffix Function
Used (indirectly) in KMP algorithm. For a given pattern P, computes the length of the longest prefix in P that is also a suffix of the given string, x.
It tells us how many characters are currently matched and reusable at the end of the text scanned so far.
For the pattern P, |P| = m, let Q = {0, 1, 2, . . . , m − 1, m}.
σ : Σ∗ → Q by σ(x) = max{k : Pk ⊒ x}
Used in the DFA matcher, (Q, Σ, δ, 0, {m}) by δ(q, a) = σ(Pqa) for all q ∈ Q and a ∈ Σ. (Pqa is the prefix at q, plus new character to test).
If P = x it would return itself because there is no proper prefix requirement.
Prefix Function
Used in KMP algorithm. An application of the suffix function, with an extra condition that the whole overlap can’t be reused.
For a given pattern P, it computes the length of the longest proper prefix of P which can be reused, i.e a proper prefix of Pk that is also a suffix of Pq. Differs from the suffix function because it must be a proper prefix, so it can’t return itself.
π : {1, 2, . . . , m} → {0, 1, . . . , m − 1}
π(q) = max{k : k < q ∧ Pk ⊒ Pq }
Knuth-Morris-Pratt (KMP) Algorithm
String-matching algorithm used to find valid shifts via the prefix function (restricted offshoot of the suffix function).
Compute prefix function (longest reusable prefix at each index). Use an index, q, to store backtracks.
For each letter in the string T, compare it with P[q+1]
If T doesn’t match, hop backwards to the last valid prefix by doing q = π(q) repeatedly until match or q=0.
If T matches, increment q. If q = length of P, a match is found, record it.
Record q = q+1 (i.e. if q was 0, record 1)
![<p>String-matching algorithm used to find valid shifts via the prefix function (restricted offshoot of the suffix function).</p><ul><li><p>Compute prefix function (longest reusable prefix at each index). Use an index, q, to store backtracks.</p></li><li><p>For each letter in the string T, compare it with P[q+1]</p><ul><li><p>If T doesn’t match, hop backwards to the last valid prefix by doing q = π(q) repeatedly until match or q=0. </p></li><li><p>If T matches, increment q. If q = length of P, a match is found, record it.</p></li></ul></li><li><p>Record q = q+1 (i.e. if q was 0, record 1) </p></li></ul><p></p>](https://assets.knowt.com/user-attachments/9f11358e-cd64-47a5-9795-533e96dc8511.png)
Abstract Data Type (ADT)
A collection of types, constants and operations performed on objects of those types, specified by characteristic identities.
Examples are a stack, queue, priority queue and dictionary.
ADTs are implemented using data structures. e.g. a priority queue is implemented using a binary heap.
ADT Priority Queue
A data structure that maintains a set of S elements, where each element has a priority. 2 implementations are binary heaps (heapsort) and binomial heaps (merge).
Types:
E - Type of elements
K - Linearly ordered type of priorities or keys
P = P(E, K) - Type of priority queues (parameterised)
Constants and Functions:
empty: P
isEmpty: P → Boolean
insert: P x E x K → P
decreaseKey: P x E x K → P
peek: P → E
deleteMin: P → P
Binary Heap
An implementation of the priority queue ADT, which is a rooted, ordered binary tree with nodes with priorities, characterised by:
Order - parent node priority >= children (if 1 = high priority then parent < child)
Shape - all layers are complete except the last, which is filled from the left
All operations are O(log n) except finding minimum, peek, O(1) and heapify, merge array, O(n).
Binomial Heap
An implementation of the priority queue ADT, which is a collection (forest) of binomial trees where each tree is in heap order, and there is only one of each order of tree. Faster merging.
All operations are O(log n) except check empty, O(1)
Binomial Tree
An implementation of the priority queue ADT which is a recursively-defined rooted, ordered tree.
Bk consists of two trees Bk-1 linked together, where the root of one is the leftmost child of the root of the other.
It always has 2k nodes, with height k. The root’s children are binomial trees of decreasing order.
Binomial Tree node structure
Degree
Priority/Key
Information
Left child
Right sibling
Linking 2 binomial trees
Must be same size.
Higher priority tree’s child becomes lower’s NEW sibling
Lower priority tree becomes higher’s new child.
Shift the higher child to become the sibling. Move over lower tree as child.
Merging binomial heaps
Recursively:
If one root has smaller degree, keep it as the root, and merge its sibling with the other tree
If both are equal degree, recursively merge remaining siblings, then link the equal-degree trees
Inserting element into binomial heap
Put element inside a new B0 and then merge it.
Extracting the minimum value of a binomial heap
If there’s only one tree, remove the root and merge the child and sibling.
If there’s multiple, locate the top-level root with minimum value
Reverse its children from being high → low order into low → high (for merging)
Remove the root and merge the remaining trees
ADT Dictionary
An ADT made of a collection of key-value pairs, such that each possible key appears once from a linearly-ordered set. Can be implemented with hashing or search trees.
Types:
K - totally ordered type of keys
I - type of information
D = D(K, I) - type of dictionaries (parameterised)
Constants and functions:
empty: D
isEmpty: D → Boolean
member: D x K → Boolean
lookUp : D x K → I
insert: D x K x I → D
delete: D x K → D
Hashing
An implementation of the ADT dictionary, where usually a small subset of keys are used.
Compute a hash function mapping keys to indices in the table, T, of size m.
Runtime for search, insert and delete are O(1) but collisions can occur and push to O(n).
Properties of a good hash function
Uniform distribution of used keys to buckets in the table.
Small change to key should create distinct and independent value.
Hashing Load Factor
For a table of size m, with n elements, indicates how full the hash table is with α = n/m
Types of hash functions
Direct-address
Chaining - Linked list for each slot
Probing - Finding the next available slot
Hashing multiplication method
h(k) = m * (kA - ⌊kA⌋)
Take the decimal part and multiply by m (table size). Use an irrational number for A for uniformity.
Probing hash function
Mark slots with a flag: occupied, available or deleted (deleted continues search).
Use a hash function h(k, i), where the probing order is given by h(k, 0), h(k, 1),… h(k, m-1).
Linear probing
With a normal hash function h’, and i = 0, 1, .. m-1,
h(k, i) = (h’(k) + i) mod m
With collisions, slot probabilities change and become non-uniform. Leads to primary clustering.
Primary Clustering
Problem in linear probing where long clusters of occupied slots form, reducing efficiency as load factor approaches 1.
Quadratic Probing
With a normal hash function h’, and i = 0, 1, .. m-1,
h(k, i) = (h’(k) + c1i + c2i²) mod m
With collisions, slot probabilities change and become non-uniform. Leads to secondary clustering
Double hashing
Using a second hash function to determine the interval between probes. The second hash function should be independent of the first, and reach every slot so can’t divide m or be 0. More likely to yield uniform distribution.
h(k, i) = (h1(k) + i * h2(k)) mod m
In-order tree traversal
Traverse left subtree, current node, right subtree.
Binary Search Tree
A binary tree with the search tree property for every node:
Nodes on the left subtree have smaller values
Nodes on the right subtree have larger values
Operations are O(n) for member, lookUp, insertion and deletion because of no guarantee of list balancing. empty and isEmpty are O(1).
Deleting nodes from a binary search tree
No children → Delete
1 child → Delete and connect parent to grandchild (linked-list style)
2 children → Replace with predecessor or successor
Red-black tree
Binary search tree where:
Root is black
No red node has a red child
Black height is the same everywhere
Null pointers are considered void black leaves
The height is at most 2x the black height, so any path can’t be more than twice as long.
A red-black tree with n internal nodes has height at most 2 log(n + 1).
Operations are O(log n) for member, lookUp, insertion and deletion. empty and isEmpty are O(1).
Black Height
The number of black nodes on any path from, but not including, a node x down to a leaf, denoted by bh(x).
Rotate red-black tree nodes right
Swap inner child, rotate clockwise.
The left node gives its right child to the right node.
Rotate red-black tree nodes left
Swap inner child, rotate counter-clockwise.
The right node gives its left child to the left node.
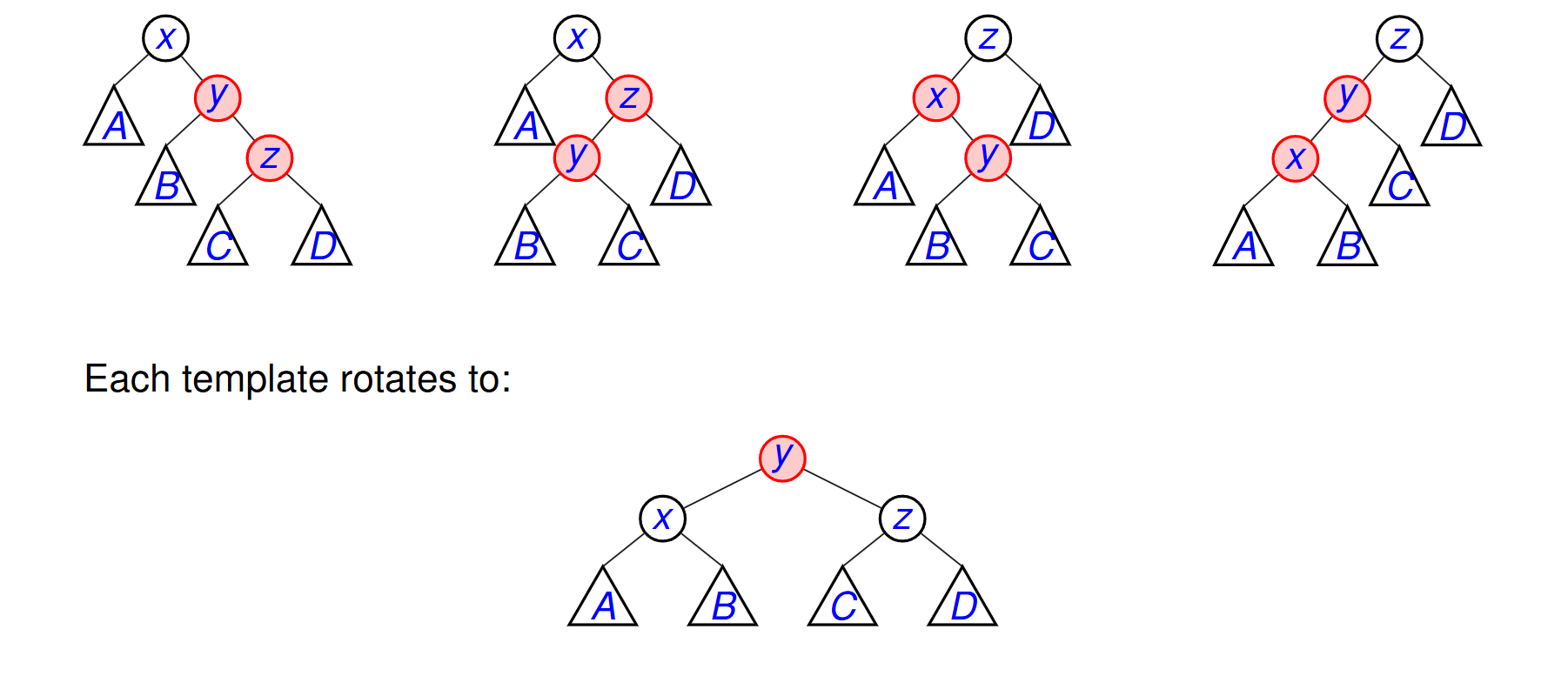
Matching red-red templates
Furthest-left is always x
Furthest-right is always z
Lower is always y
Each template rotates to xyz, where y is red.
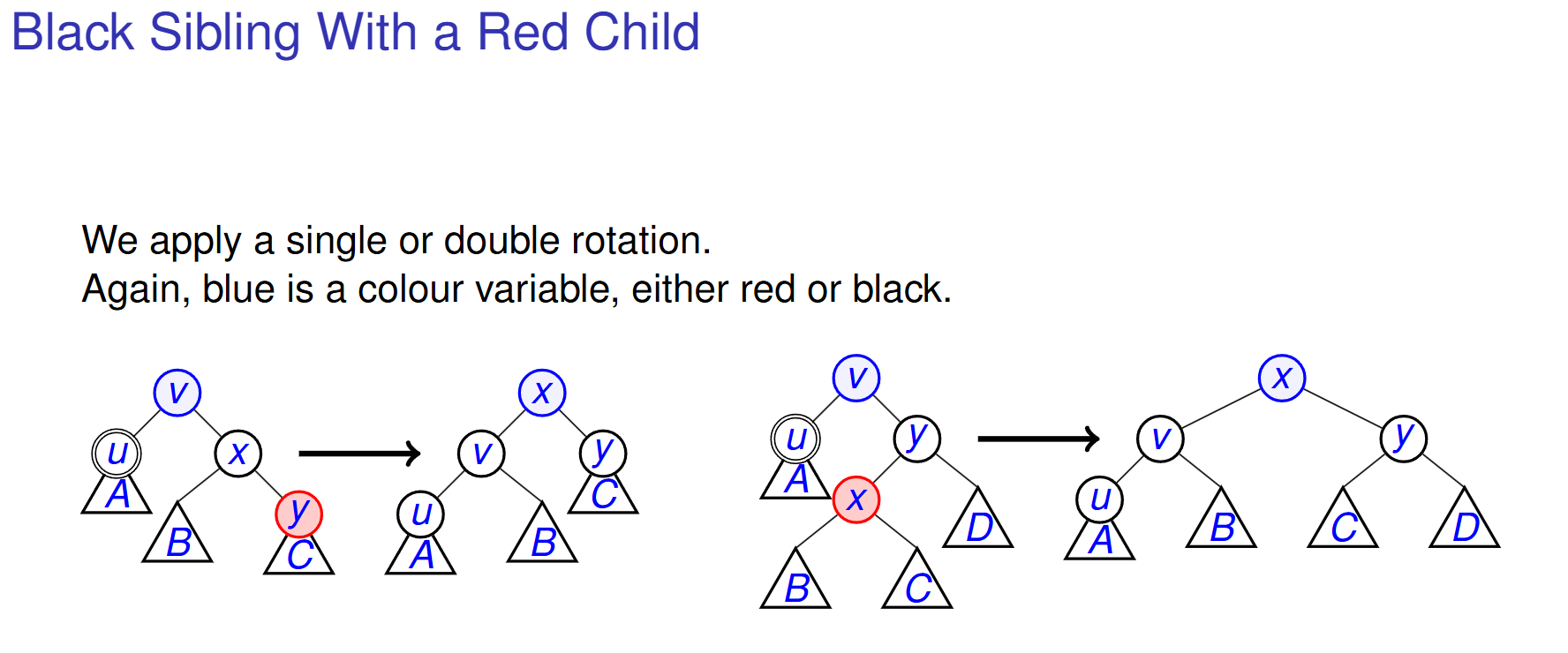
Deleting black nodes adjacent to void leaf
Delete node, replace with child if able, else replace with NIL, donate blackness.
If it becomes double-black:
Black sibling with red child - Rotate and recolour (propagate blackness up and try to absorb in the rotation, x takes v’s colour).
Black sibling with black children - Push up blackness
Red sibling - Rotate to a previous case
NOTE: double-circle node is the double-black NIL node after deletion