ECON 2300 master flash cards
1/204
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
205 Terms
population
complete set of all items that interest an investigator
sample
observed subset, or portion, of a population
sample size denoted as n
parameter
unknown to investigator
numerical measure that describes a specific characteristic of the population
statistic
known to investigator
numerical measure that describes a specific characteristic of the sample.
sampling errors
random differences between sample and population
- cancel out on average
- decrease as sample size grows
nonsampling errors
systematic differences between sample and population
- do not necessarily cancel out on average
- do not necessarily decrease as sample size grows
Margin of error
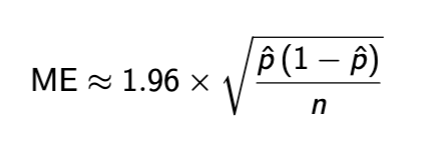
Margin of error notes
p hat = proportion of sample studied
range of p hat ± ME
only captures sampling error
non response bias
a form of nonsampling error
basically the bias occurring when certain population is more/less likely to respond to survey
summary statistics
summaries of data found. will not be completely accurate
frequency
number of times that a variable takes a certain value in a sample
relative frequency
proportion of times that a variable takes a certain value in a sample
histogram
plot of (relative) frequency by values
some notes on histograms
bins can change size - sometimes necessary to be smaller, bigger, unequal sizing
very important in general
histogram R code
hist(data_name, breaks = (# of bins), xlab = ’x axis label’)
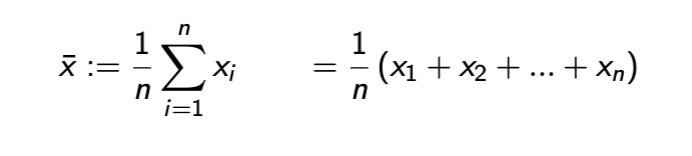
Sample mean
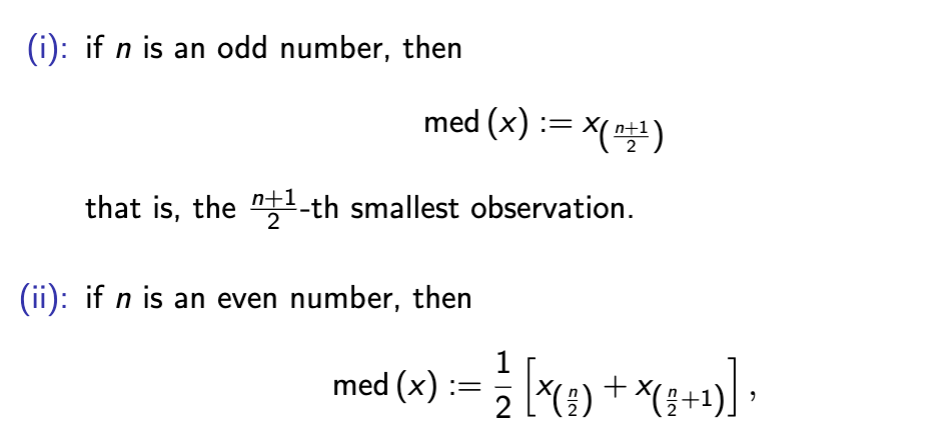
sample median
a cutoff value that is weakly larger than 50% of the sample
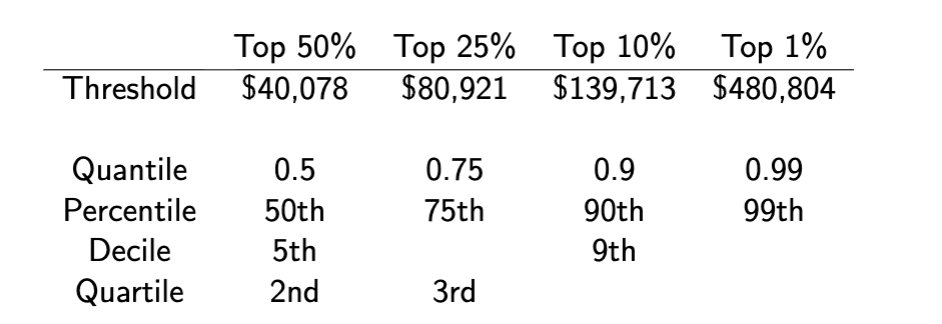
quantile
measure of proportions of data
take any number α between 0 and 1.
− α-quantile = cutoff value that is weakly larger than (100α) % of the sample.
− e.g. median is the 0.5-quantile.
quantile practice
range
maximum observation - minimum observation
less used, we usually use intervals
range R code
range(handspan)
interquartile range
3rd quartile - 1st quartile
less sensitive to outliers
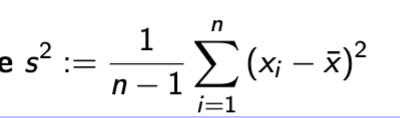
Variance
essentially the average squared difference from the mean.
− division by n − 1 instead of n
− also sensitive to outliers.
Variance R code
var(data_name)
standard deviation
same information as variance
− but more commonly used, since it has the same unit as the data
standard deviation R code
sd(data_name)
basic R commands
table
hist
mean
median
quantile
range
IQR
boxplot
var
sd
access a variable in R
use $ symbol → data_set$var_name
eg to find amount of affairs in affairs file, df_aff$affairs
R cross tabulate 2 tables
table command!
table(data_set$var_one, data_set$var_two)
table(df_aff$affairs, df_aff$gender)
scatterplot in R code
two variables, use plot function
→ variables: disp (displacement), mpg (miles per gallon)
plot(mtcars$disp, mtcars$mpg)
covariance
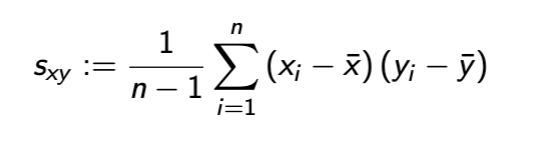
covariance and linear dependence
Zero ⇒ no linear dependence
▶ Positive ⇒ positive linear dependence
▶ Negative ⇒ negative linear dependence
covariance units
product of two variables analyzed
correlation coefficient

correlation coefficient notes
Centers and standardizes each observation
▶ Bounded between -1 and 1 (later in the course).
correlation and linear dependence
Zero ⇒ no linear dependence
▶ Positive ⇒ positive linear dependence
▶ Negative ⇒ negative linear dependence
if we want to correlate between more than 2 variables
we run a regression
linear transformation of sample xi
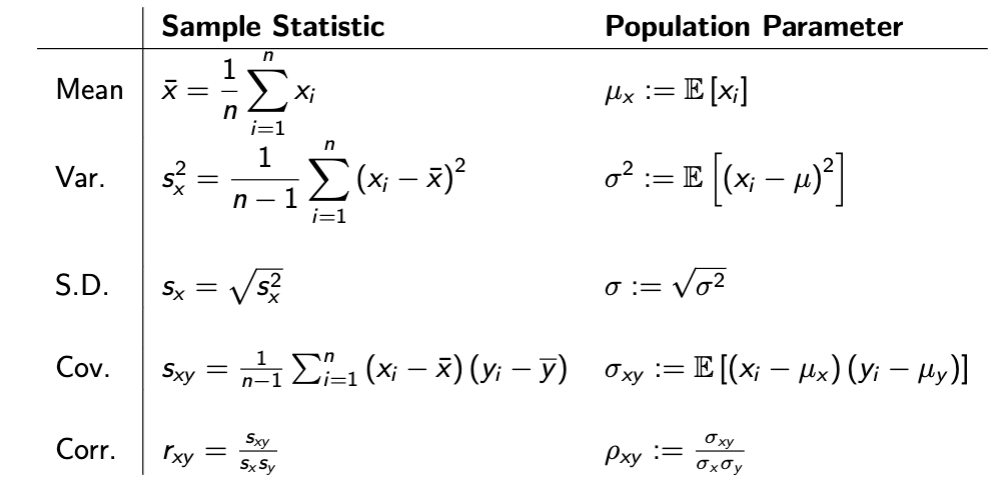
sample stat vs population parameter table
Expectation
form of population mean
can be replaced w/ pictured formula if looking at whole population
law of large numbers
often times, as sample size increases, the sample statistic approximates the corresponding population parameter better and better.
→ the most important result in the foundation of statistics
central limit theorem
often times, when sample size is sufficiently large, the difference between the sample statistic and the corresponding population parameter approximately follows the normal (Gaussian) distribution.
→ the second most important result in the foundation of statistics
R code after lecture 3
var
sd
read.csv
$
attach
table(x,y)
boxplot(x~y)
plot(x,y)
cov(x,y)
cor(x,y)
random experiment
an experiment whose outcomes are random
basic outcome
the finest-grained, relevant outcome of a random experiment
relevant: depends on what you care about in your random experiment.
finest-grained: finest categorized, cannot be further divided in a relevant way.
sample space
set of all possible basic outcomes of a random experiment
event
a subset of the sample space.
⇔ equivalently, a set of basic outcomes in the sample space.
Event format
Captial E, e.g. E1, E2
E1 = {HH, HT } - event 1 is heads flipped first
Realization
Only one event in sample space Ω will be realized
signified as ωrealized ∈ E
Union E1 ∪ E2
the event that at least one of E1 and E2 occur (if not both)
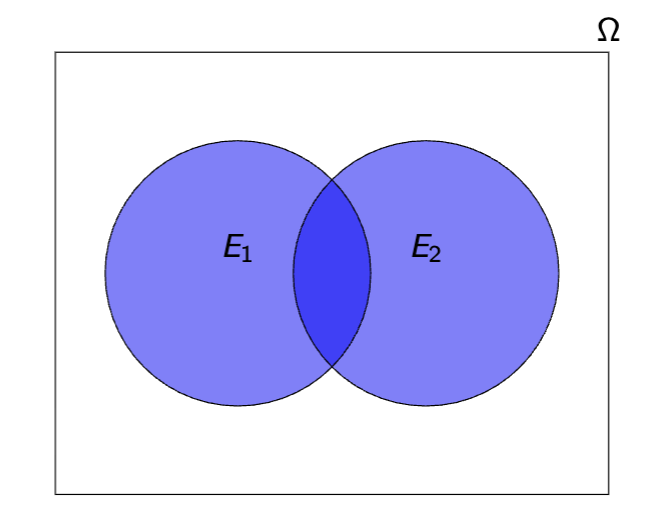
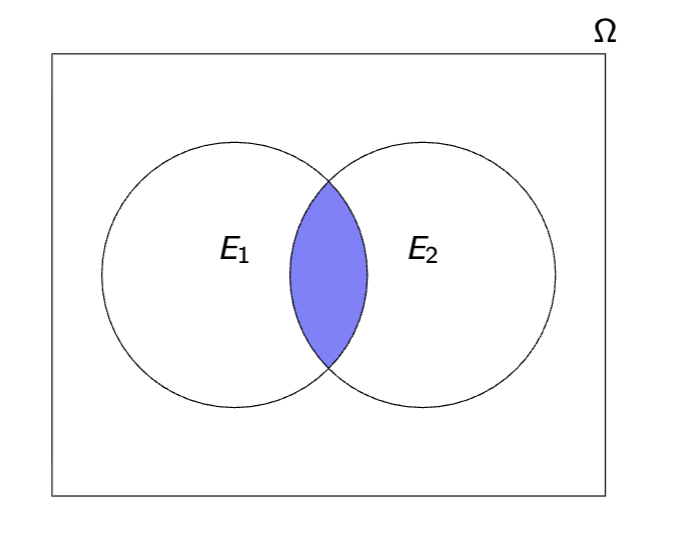
Intersection of Events: E1 ∩ E2
the event that both E1 and E2 occur
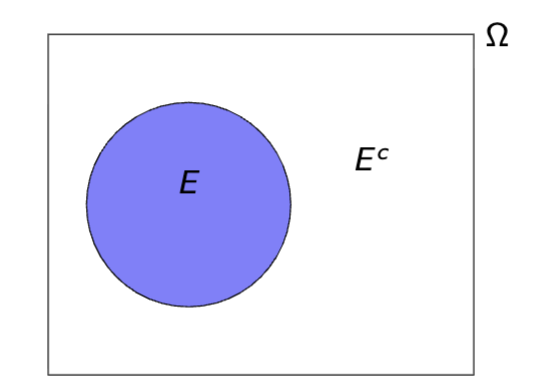
Complement of Event: Ec
Event in which E does not occur
E c ≡ Ω\E := {ω ∈ Ω : ω /∈ E }
Probability P represents
A function of events
In sample space, probability function assigns a number P(E) to E to represent the probability of the event
Axiom 1
0 ≤ P (E ) ≤ 1 for Any Event E
Basically any event must be between 0 and 1
Axiom 2
P (Ω) = 1
The sample space Ω is also a subset of itself
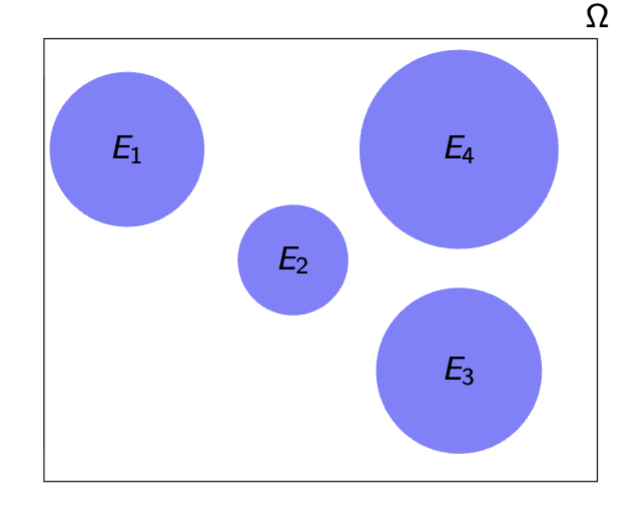
Axiom 3 background: mutual exclusivity
2 Events: mutually exclusive if intersection is empty
E1 ∩ E2 = ∅.
Sequence of events: mutually exclusive in same way
Ei ∩ Ej = ∅, for any i unequal j.
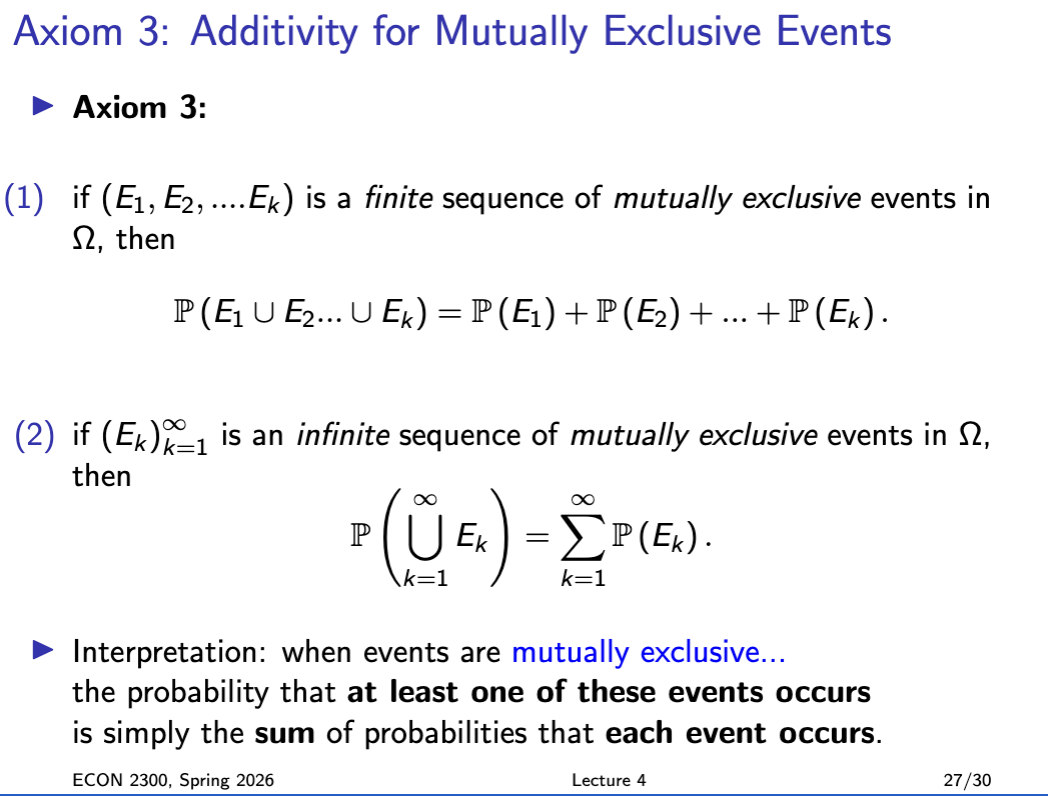
Axiom 3
If E1…En is a set of mutually exclusive events, then probability of several events occurring is just the sum of their probabilities
Classical probability
defined for random experiments in which all basic outcomes are (thought to be) equally likely
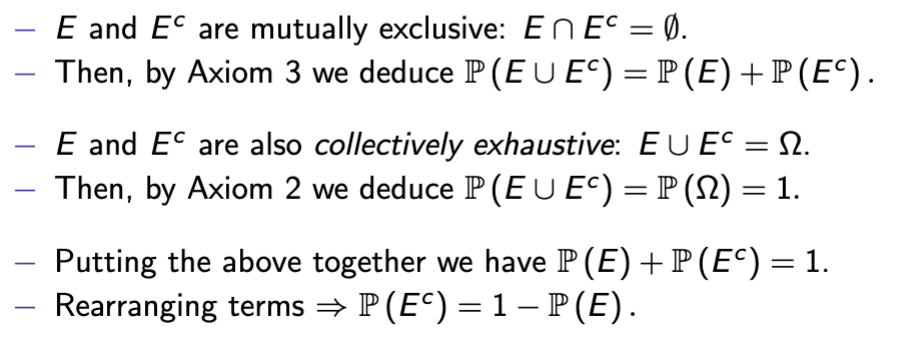
Complement/Logical Negation Rule
P(Ec) = 1 − P(E)
Complement/logical negation proof
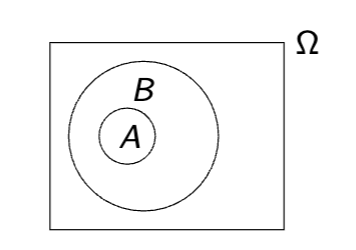
Inclusion/Logical Implication Rule
If event A is included in B and logically implies Event B, then A is less than or equal to B
inclusion symbol A ⊆ B
Events A and B are logically equivalent if
not only A logically implies B,
but also B logically implies A:
then P(A) = P(B)
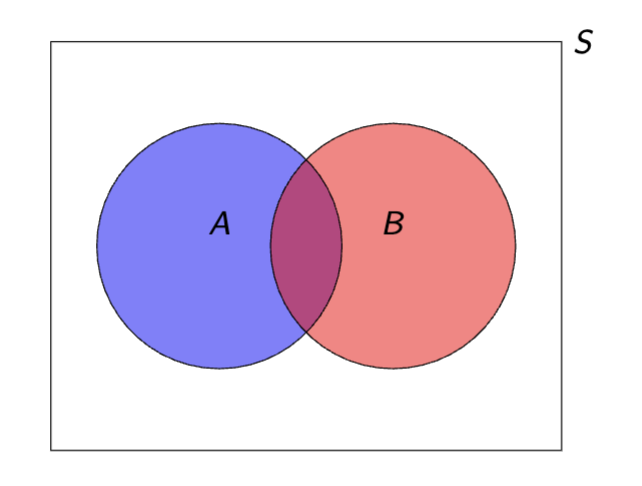
Union/Logical Addition Rule
P (A ∪ B) = P (A) + P (B) − P (A ∩ B) .
Conditional Probability
If B logically implies the sample space (aka is less than or equal to it) the probability of B given A, or P (B| A) is
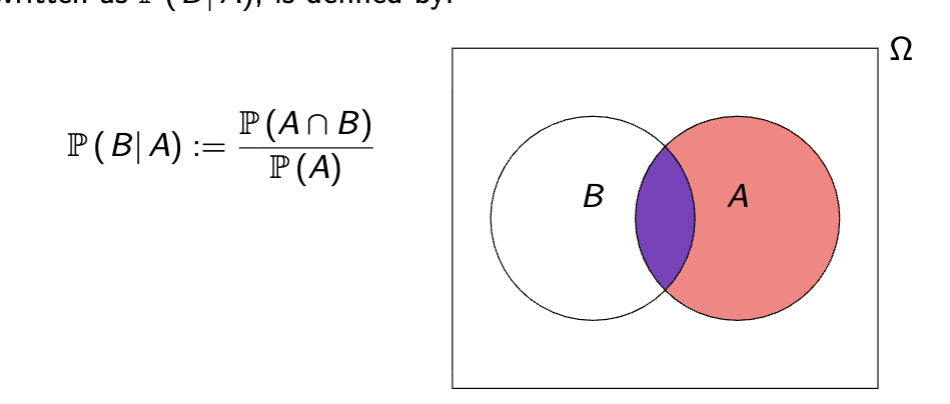
intuition on conditional probability
in conditional probability we set A as the sample space and no longer care about anything outside of it
Conditional Probability Axioms
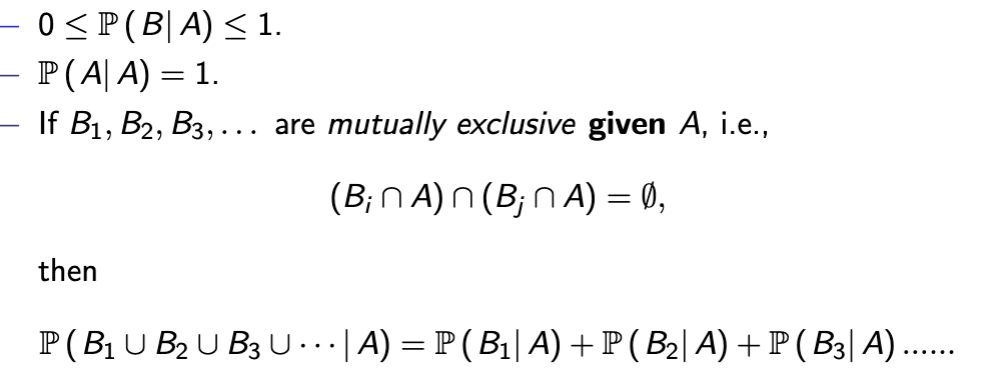
Conditional Probability Rules

Exceptions on conditional probability rules
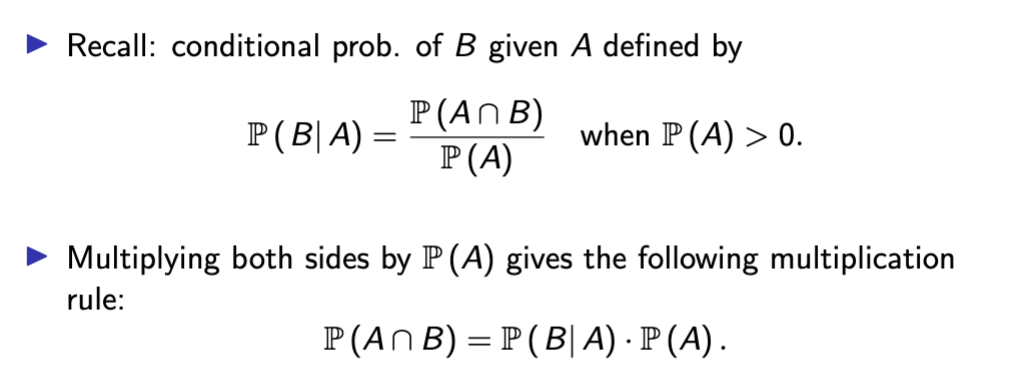
Multiplication Rule Conditional Probability
Multiply both sides of equation by denominator probability to rearrange
statistical independence
Probability of intersection of events equals the product of both events multiplied, and conditional probability is the probability of the first event in parenthesis
basically shows one event occurs independently of the other
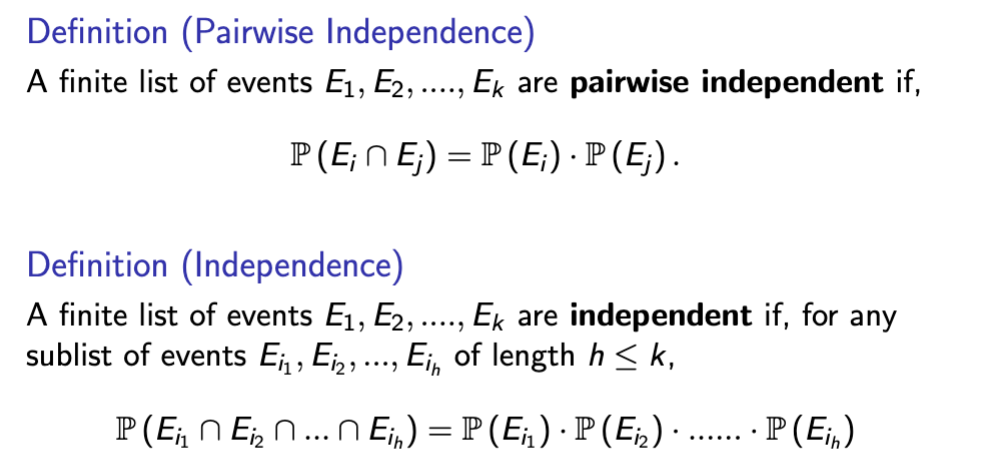
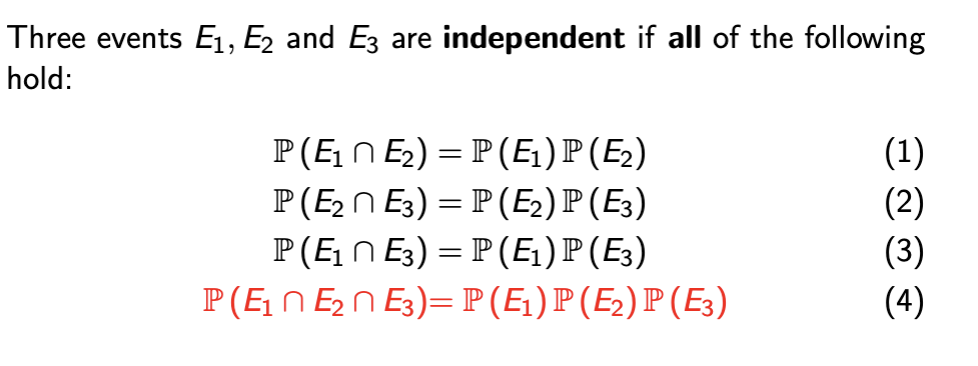
pairwise vs mutual independence
Pairwise independence means any two events in a collection are independent, while mutual (or collective) independence requires that all events are independent jointly
mutual independence implies pairwise dependence among all items in the group, but not vice versa.
mutual independence example
Law of total probability background - mutually exclusive and collectively exhaustive
Law of total probability
If a sequence of events E1…n is mutually exclusive and collectively exhaustive, the probability of A is the sum of A conditioned over each event multiplied by that event

Bayes Rule
Bayes Rule Proof
then divide both sides by P(B)
Base Rate Fallacy
forgetting about the base rate when forming beliefs
1% of the population is infected with a virus, test accurately detects it 99.99% of the time - that accuracy is the conditional probability over that 1%
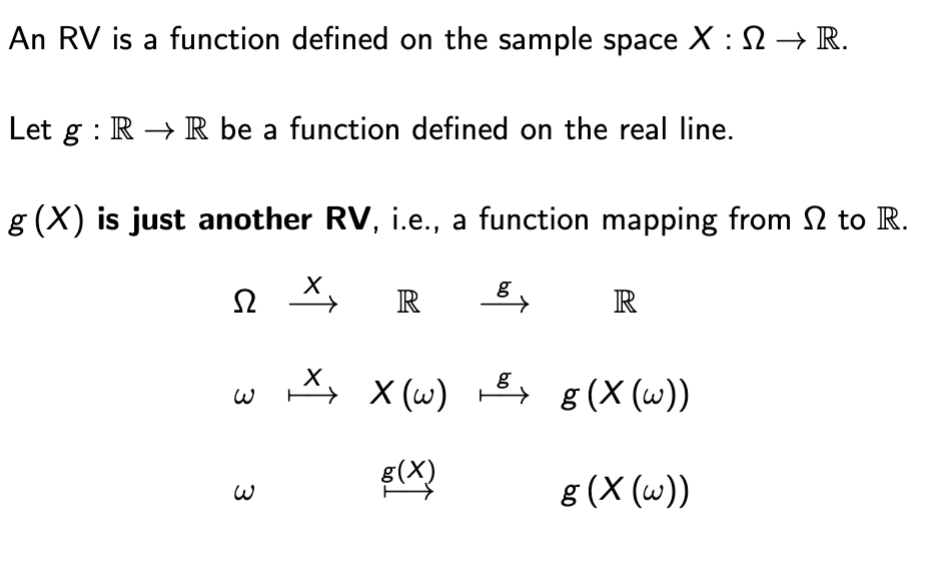
Random Variable
random variables are functions that map out outcomes onto a sample space
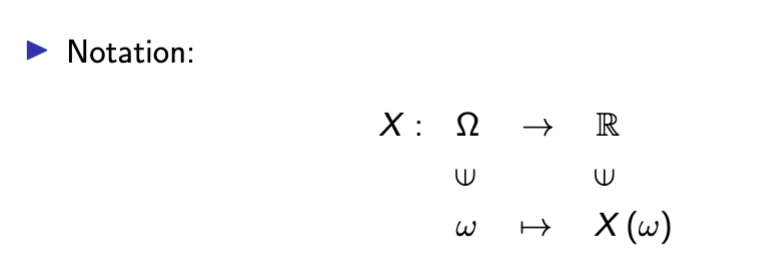
Random Variable Anatomy
RV - function defined on the sample space
Realization - particular numeric value in R that an RV can take on
Format - {X = x} := {ω ∈ Ω : X (ω) = x} ⊆ Ω to represent the probability that Random Variable X takes on x
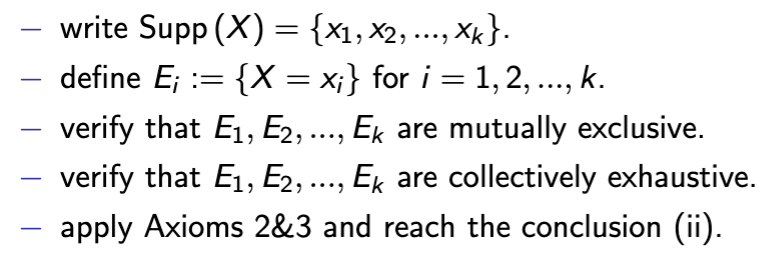
Support
the set of all possible realizations of a RV.
Supp (X ) := {X (ω) : ω ∈ Ω}
discrete RV
takes on counting numbers, or select values
{0, 1, 2}, {..., −2, −1, 0, 1, 2, ...}, N
Continuous
takes on all values in a segment
support is continuous,
− e.g. [0, 1], (0, ∞), R.
Mixed
support neither discrete nor continuous
− e.g. {−2, −1} ∪ [0, 1]
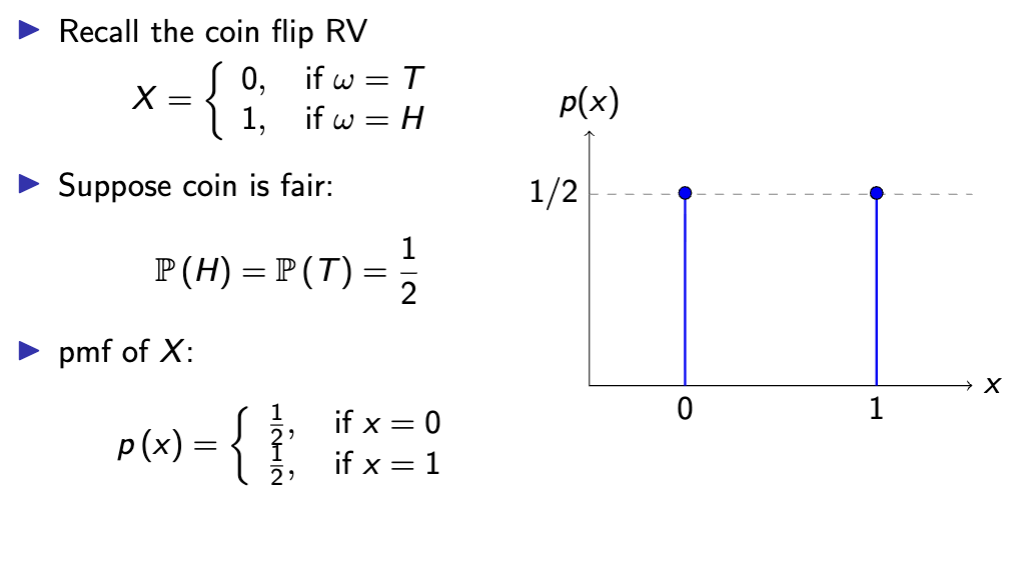
Probability Mass Function
A function of a discrete random variable mapping support of X to real line
Plug in realization x to get probability p(x)
support - p : Supp (X ) → R+
real line - R+ := [0, ∞)
pmf - p (x) := P (X = x)
pmf formatting
function = probability if x takes on value x
When writing pmf x
writing down support is also necessary
The pmf is only (explicitly) defined on the support.
▶ Implicitly: outside the support set, all probabilities are zero.
▶ e.g. for the coin flip RV, Supp (X ) = {0, 1}, and you may write:
p (100) = P (X = 100) = 0.
properties of probability mass functions
between 0 and 1
sum of all probabilities over support is 1
proof of ii pmf rule
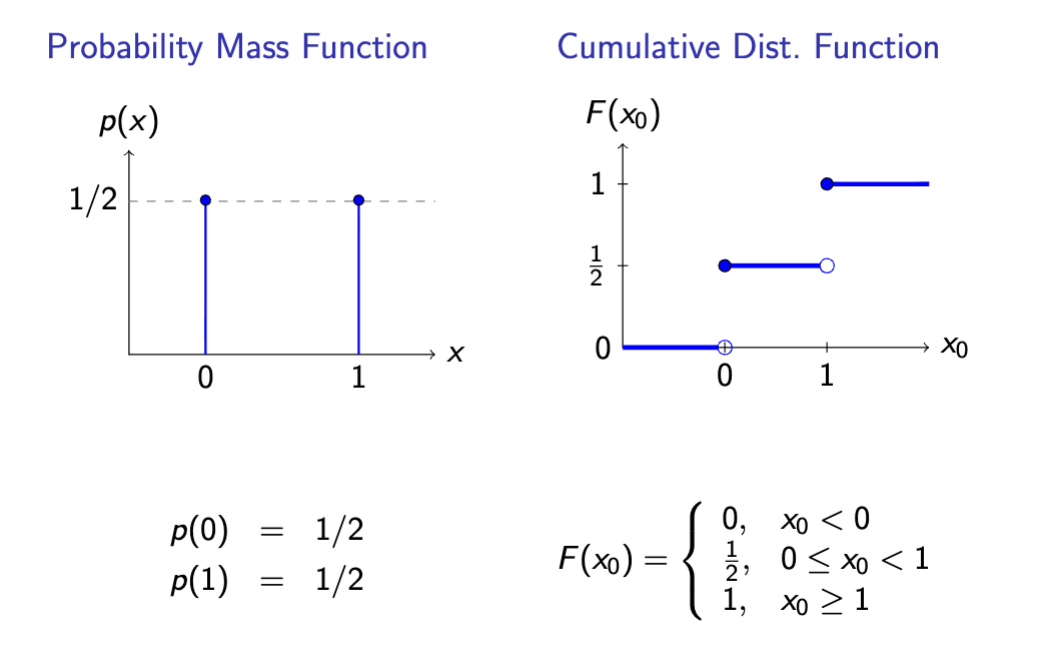
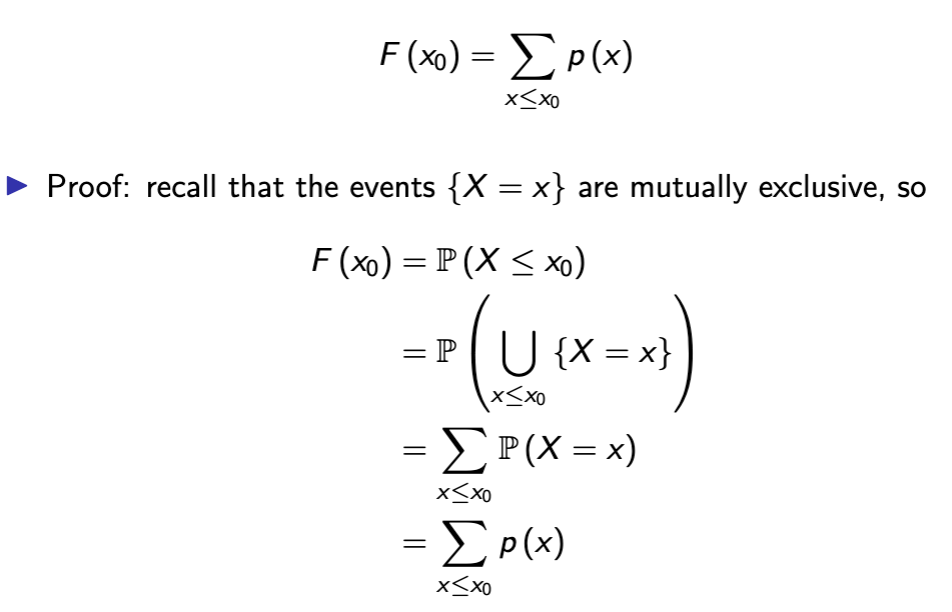
cumulative distribution function
Function of a random variable X representing the cumulative probability of each event - eg probability of X or anything less than it occurring
space F : R → R+
function F (x0) := P (X ≤ x0) , for any x0 ∈ R.
Note: here x0 is not required to be inside Supp (X ).
cdf vs pmf graphs
cdf properties
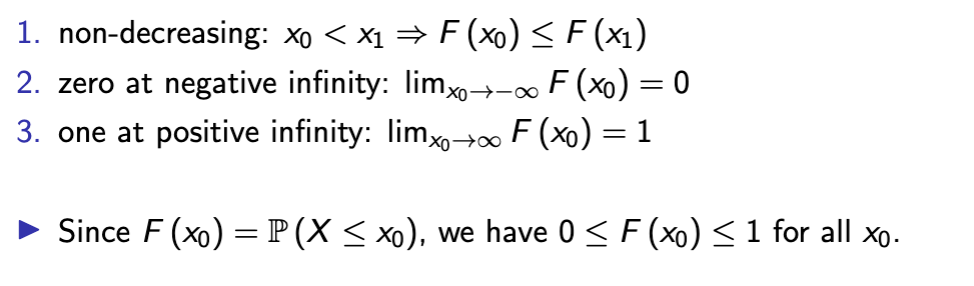
in discrete variables, you can obtain the CDF from the pmf by
adding the pmf
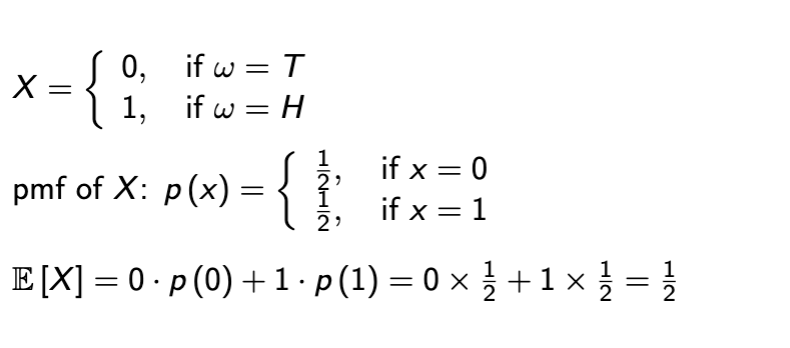
Expectation
mathematical expectation is like a weighted average of a random variable
also written as μ or μx
weak expectation from pmf
Function of an RV is
Another RV
more on expectation of a pmf
from the example in the screenshot, you can turn the expectation into a function g(x)
Plug in each value of X into g(X) - this finds new support of Supp {1, 4}
Solve and then multiply each value by respective probability
Add to get expectation!
General Formula for Functions of RV
X can be a discrete RV
Y = g(X)
this means support of Y is {g(X1), g(X2),….}
Here we can have several support values be the same thing
pmf of Y shown in screenshot - basically in english we take the new support of Y and multiply by respective probabilities

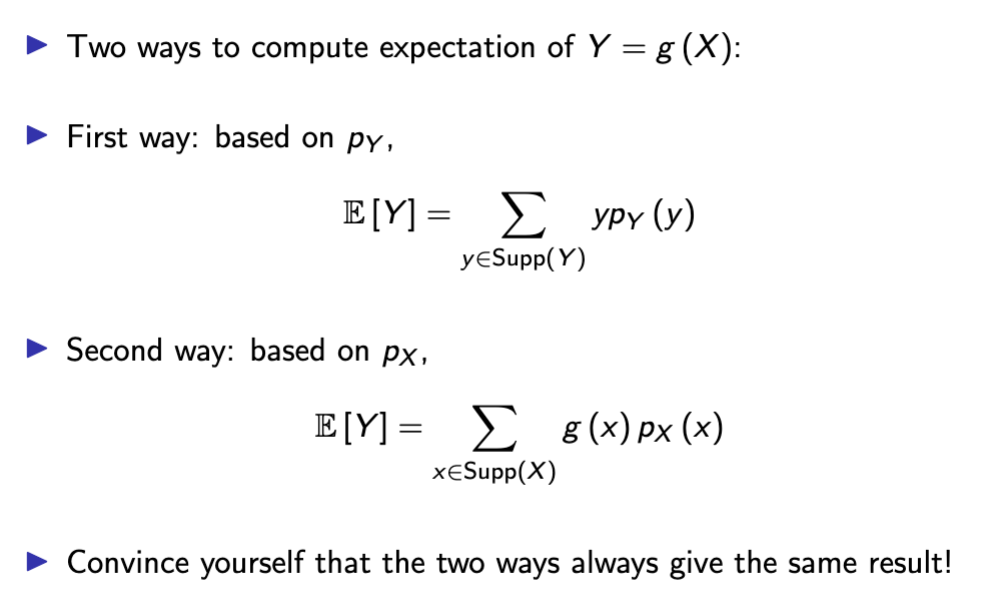
2 ways to compute expectation of a function of an RV
Based on the PMF of Y, where you find the PMF first and then multiply by each probability
By using the Law of the Unconscious Statistician, in which you calculate g(X) at each point and then find probability
In general
E [g (X )]̸ = g (E [X ])
Expectation of a function doesn’t equal the function of an expectation UNLESS g(X) is linear
linearity of expectation/common expectation transformations
E [aX + b] = a · E [X ] + b