Adv Control 15-17
1/13
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
14 Terms
What can a mathematical model be used for within the context of control engineering?
Create simulations for testing
Create and test controllers
Test the limitations of the system
Provide a means of investigating the constraints of the system
Develop model based controllers
Enable testing to be carried out that may not be practical
Provide test data for further algorithms
What steps should you go through before using a mathematical model?
The mathematical model should be examined via verification methods such as inspection (where each stage of the process is examined and compared to the real system), demonstration (demonstrate that the model is able to function as you expected it to. Test the model with known inputs and check the output) and test (where test scenarios are developed that allow the user to test the model appropriately).
The model being used should also be validated. Validation is the process where the outputs of the model are compared to the outputs of the actual system being modelled. The user should use a validated model where practical and possible. There are a few different methods of validation and the one selected depends on the data available to the user.
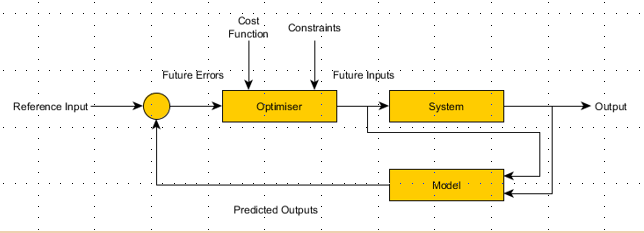
Provide a description with a block diagram of model predictive control.
A class of algorithms that use a system model to predict the future response of the system In theory the algorithms can be used to calculate expected values of the controlled variables as a function of possible control actions The control action can then be selected by some criteria At each iteration of the controller the algorithm attempts to optimise the future behaviour by calculating the sequence of variable adjustments.
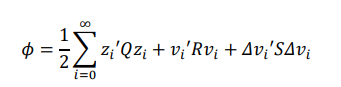
Define what this equation is and what z, Q, R and S within the equation provided below
It is a quadratic objective (cost) function used in model predictive control. z is the current output of the system based on the current states and the output matrix C, Q is the cost matrix associated with the output of the system, R is a cost matrix associated with the input of the system and S is a cost matrix associated with the change of the input
What is the basic process for the Model Predictive Controller
Obtain an estimate of the states and disturbances x_t, p, d
Determine the steady state target y_s, x_s, u_s
Solve the regulation problem u_f
Let 𝑢_𝑡=𝑢_𝑓+𝑢_s
Repeat for t+1
Provide two advantages and disadvantages.
Advantages: Straightforward formulation, based on well understood concepts, Explicitly handles constraints
Disadvantages: The model needs to be a reasonable representation of the system, the constraints need to be well understood.
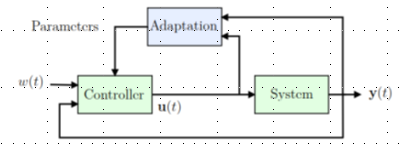
What is the basic objective of adaptive control along with a block diagram.
Maintain consistent performance of a system in the presence of uncertainty and variations in plant parameters.
What is the key difference between adaptive and robust control.
Adaptive control is when you design a controller that can adapt to the external changes affecting the system as opposed to just making it robust. It automatically adjusts the controllers in real time.
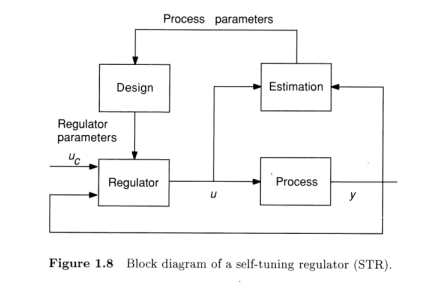
Describe what is meant by the Self Tuning Regulator. Provide a block diagram
The Self Tuning Regulator method of adaptive control updates the estimates of the parameters from the system and the controller is updated based on a solution of a design problem. In theory the controller is redesigned. The estimation block estimates the current states based on the current system outputs, the current system inputs and the model. The design block is an online solution to a design problem for a system with known parameters. The STR attempts to automate the controller design. An example of this would be the calculation of the PP controller based on the current state of the system and the state model.
Provide a simple description of Inverse Simulation
Inverse Simulation considers the desired responses over the course of a desired output Instead of creating a single goal and allowing a controller to control to this goal, Inverse Simulation provides the complete control action required to achieve that goal Typically the desired response is known, Inverse Simulation uses this to generate the control action
Describe two applications Inverse Simulation be used for
Verification – Using an inverse simulation algorithm the actual output of the real system can be used as input at a comparison of the inputs can be made. This could be used as a method of verification to measure the performance of the system after a run.
Validation – Inverse simulation can be used as a method of validation. This is done by using the output data generated by the real system and applying it to the Inverse Simulation algorithm. The input generated by the Inverse Simulation is the compared to the input applied to the system and the discrepancies are compared. This supports the validation process.
What differences exist between the differential method and the integration method of Inverse Simulation?
Integration method can use ANY representative model of the system as long as the outputs and inputs remain the same whereas the differential method requires a reformulation of the algorithm Differentiation method is faster to calculate but the integration method is more stable
What role does tolerance play within inverse Simulation?
Parameter associated with the difference between the output of the model and the desired output. The tolerance is Dependant on the actual capabilities of the system (response time, saturation limits, etc). A high tolerance value will lead to a highly accurate control input however, it may take time to converge on a solution if it converges at all. A low tolerance value will allow a solution to be found quicker but the associated output may not be as accurate. The tolerance set provides an indication of the output accuracy that will be achieved.
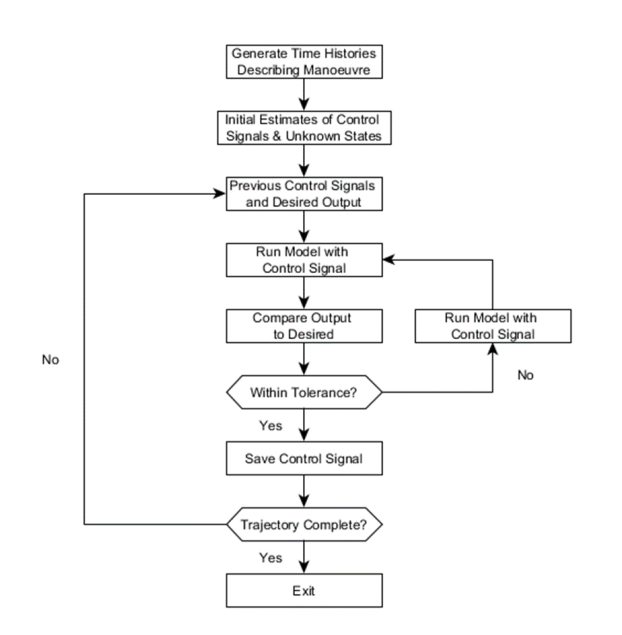
Provide a basic flowchart for the Inverse Simulation Algorithm.