3.5 Reduction of Order
1/6
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
7 Terms
Reduction of Order
When given a second-order differential equation whose coefficients are non-constant, solution functions can be found; however, applying this method requires that we already know one solution. If we do not know one solution, then we cannot apply this method whatsoever.
Reduction of Order Algorithm
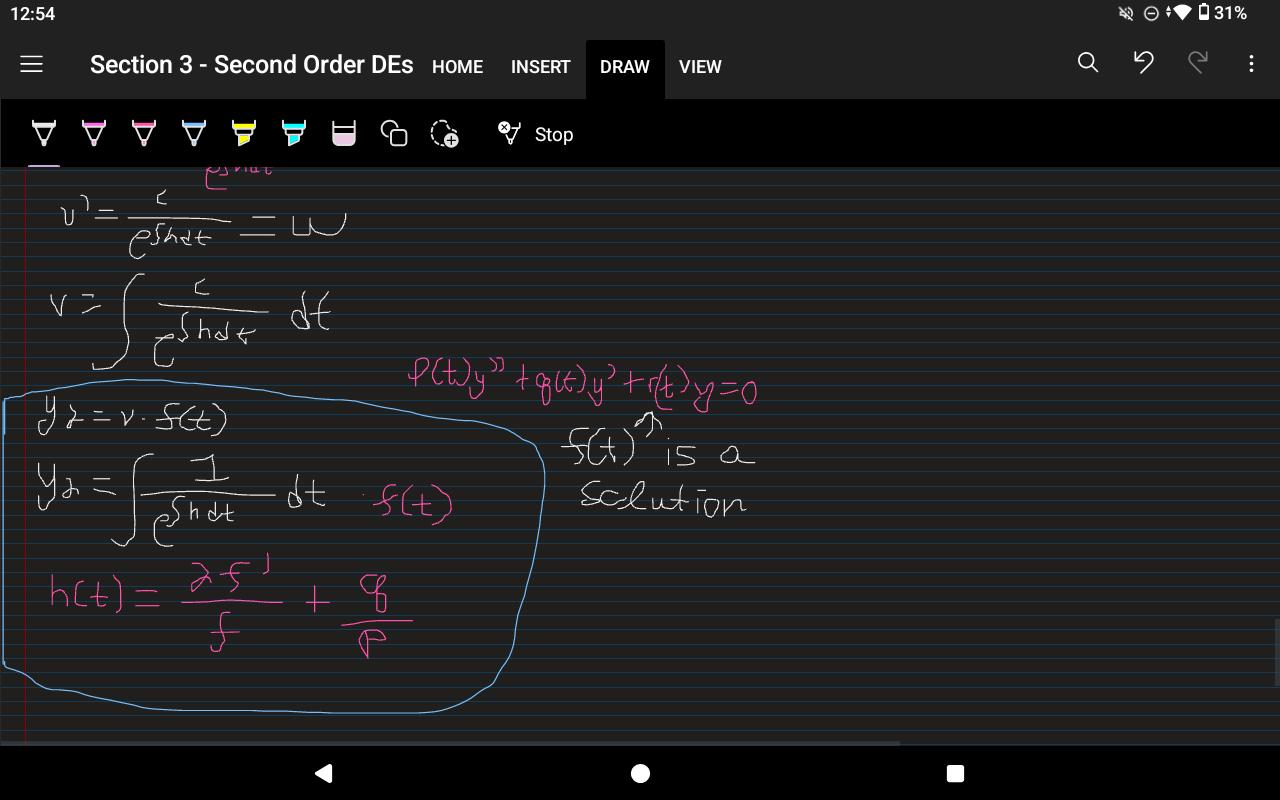
Given a solution function f(t), we can solve for the other solution to the 2nd-order differential equation by realizing that its second solution would have to be in the form of y2(t) = v(t)f(t) — where v(t) is some non-constant function; recall that v(t) cannot be a constant because then y2(t) and y1(t) would not be linearly independent of each other.
From here, we calculate the first and second derivatives of y2(t) and plug them into the original differential equation. From here, we will always obtain a second-order differential equation with just the y” and y’ term (no y term).
From here, we do a substitution so as to reduce the second-order into a first-order (hence the name of the algorithm).
Plug the substitutions back into the original equation and now we have a first-order linear differential equation.
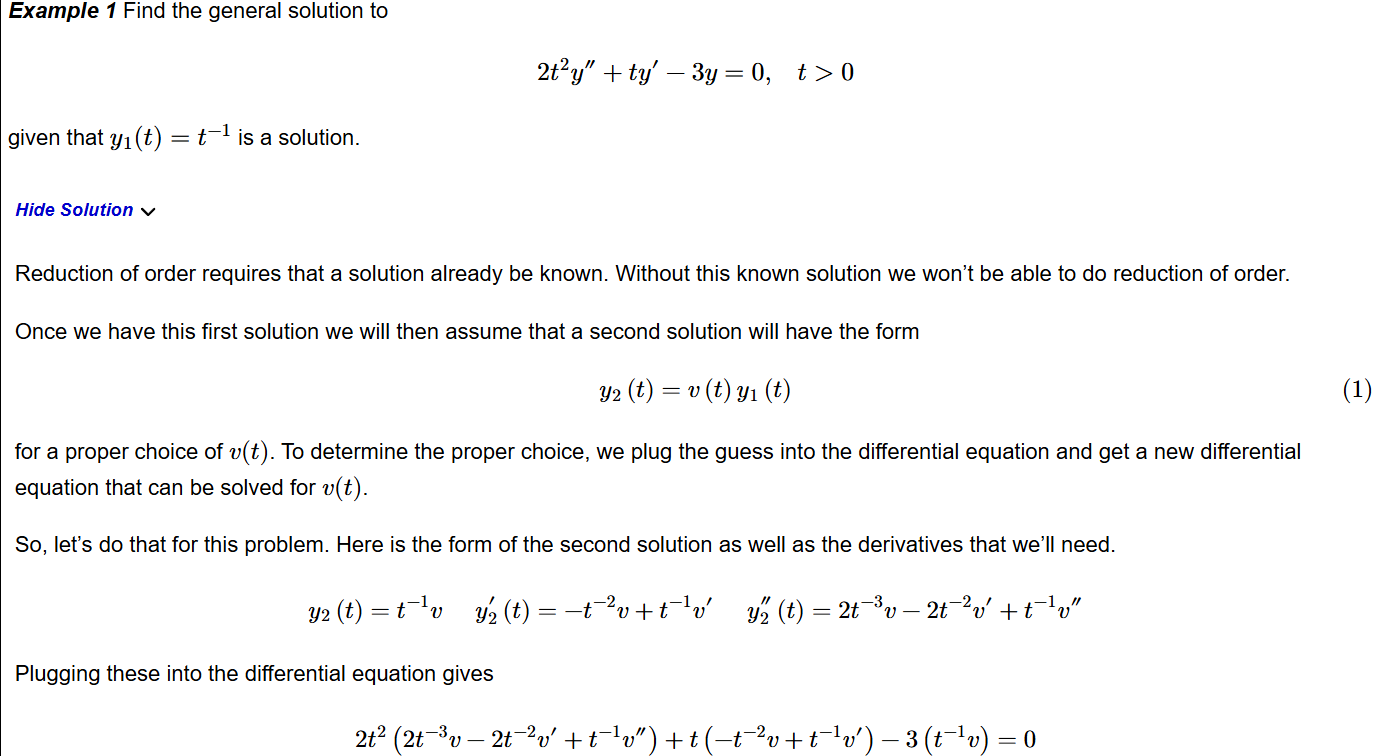
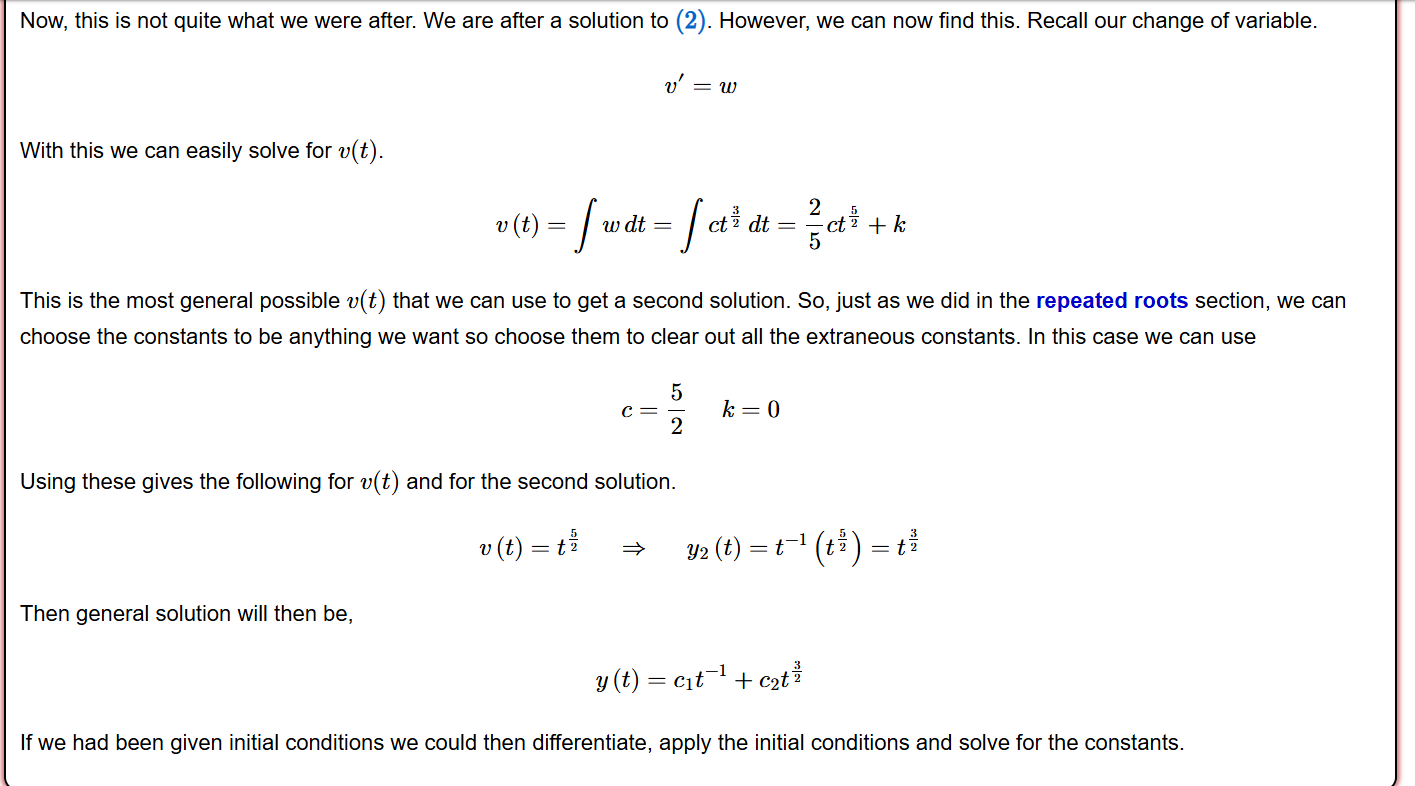
Reduction of Order Example: Part 1
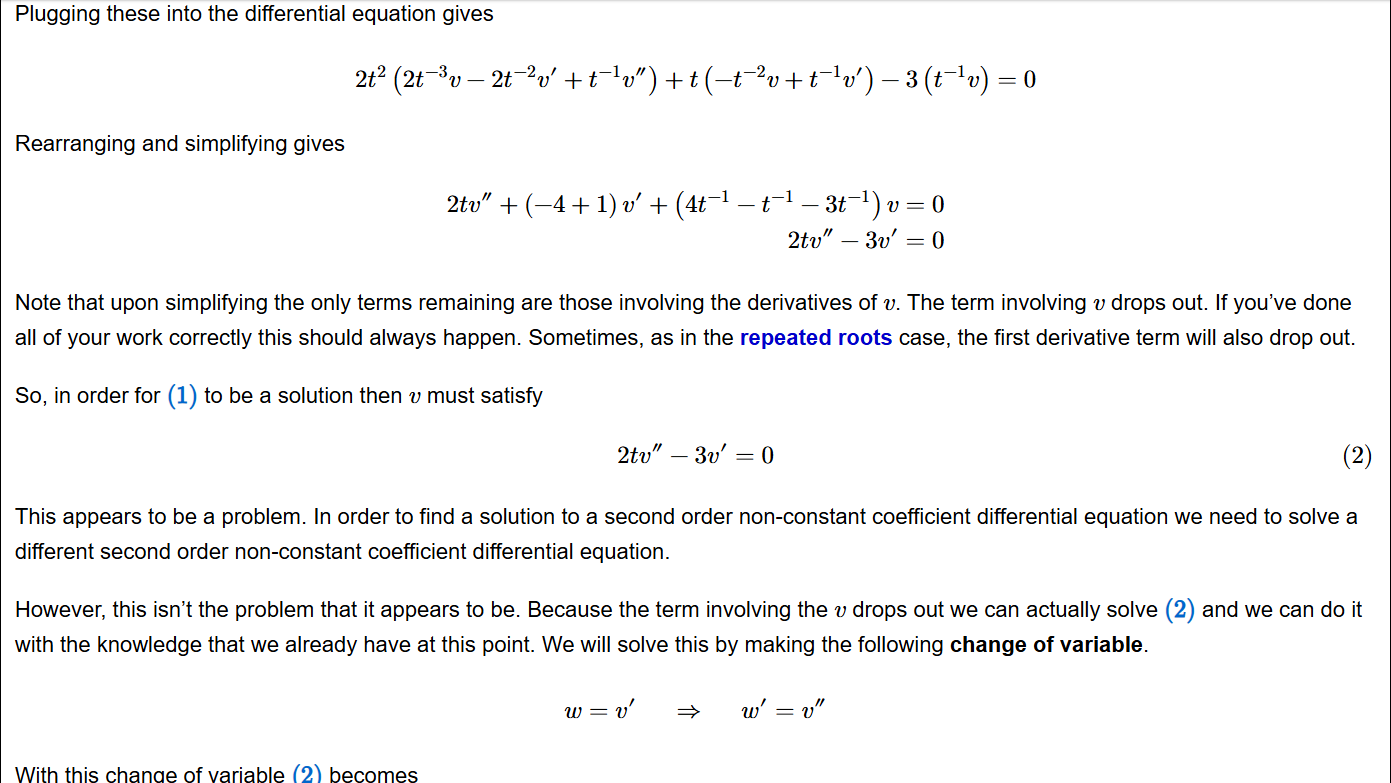
Reduction of Order Example: Part 2
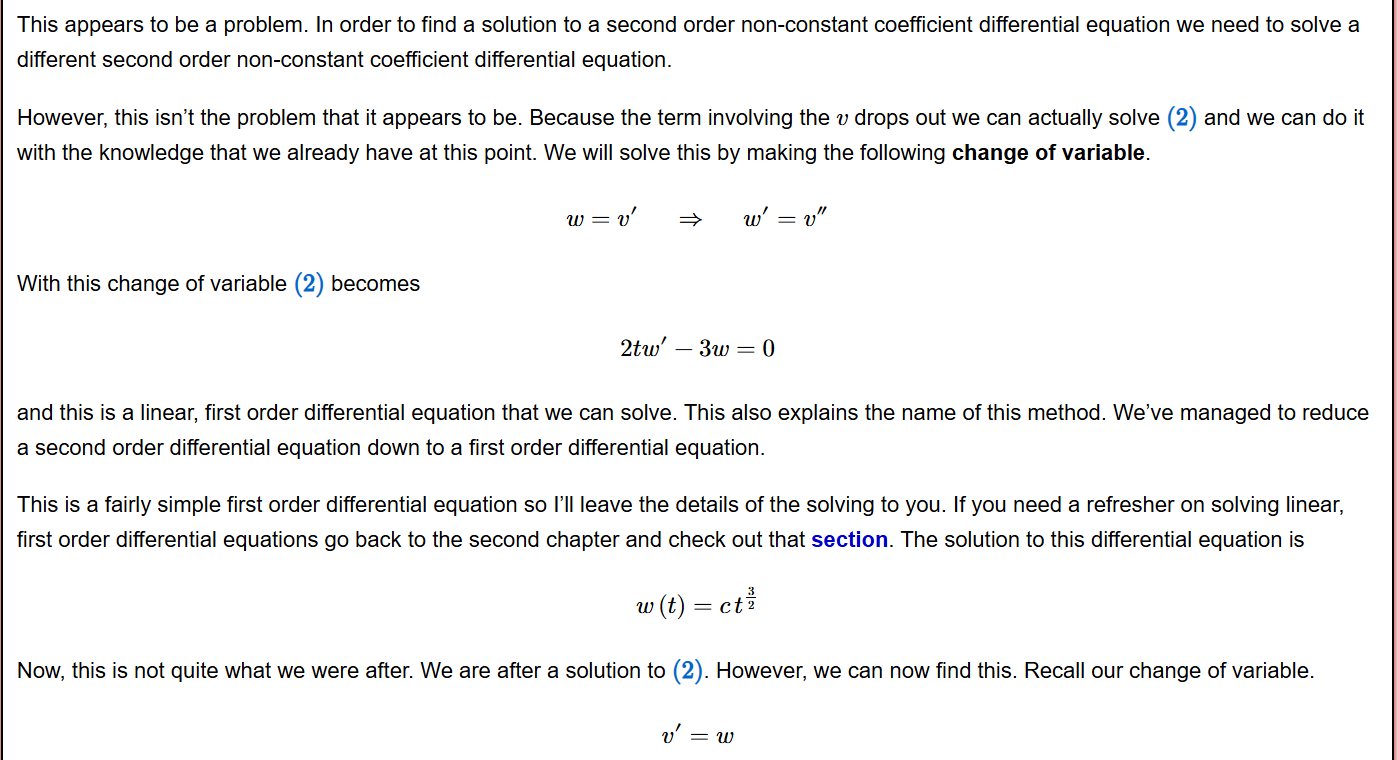
Reduction of Order Example: Part 3
Reduction of Order Example: Part 4
Reduction of Order Formula (Alternative Approach)
This is a generalization of the algorithmic approach utilized for this topic so as to not have to re-invent the wheel every single time: