PHYSICS Ch. 4 Statics
1/15
Earn XP
Description and Tags
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
16 Terms
Statics
a subdivision of dynamics that deals with objects in equilibrium
when the forces and torques acting on an object are balanced.
no net force or net torque is acting on the object.
Stability
how likely an object is to tip over when being pushed or moved
static equilibrium
a state of equilibrium where an object is at rest
net force and torque on the system is zero
dynamic equilibrium
a state of equilibrium where an object is moving at a constant velocity
net force and torque on the system is zero
centre of gravity (cg)
the average location of weight of an object and the base of support is the region of ground surface which an object is in contact with
An object will tip over or fall over when its center of gravity is no longer directly above the base of support.
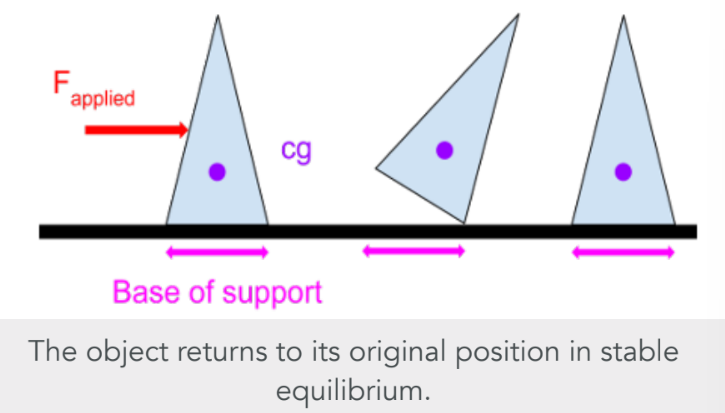
Stable equilibrium
A system is in stable equilibrium when, if displaced, it returns to its original position. The cg remains within the base of support.
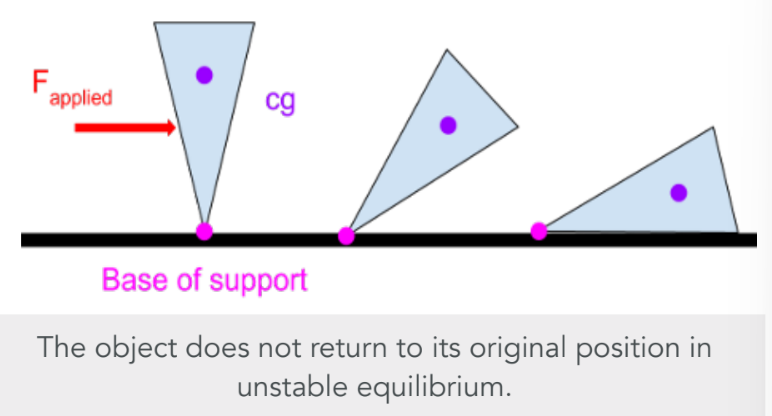
Unstable equilibrium
A system is in unstable equilibrium when, if displaced, it does not return to its original position. The cg is outside the base of support.
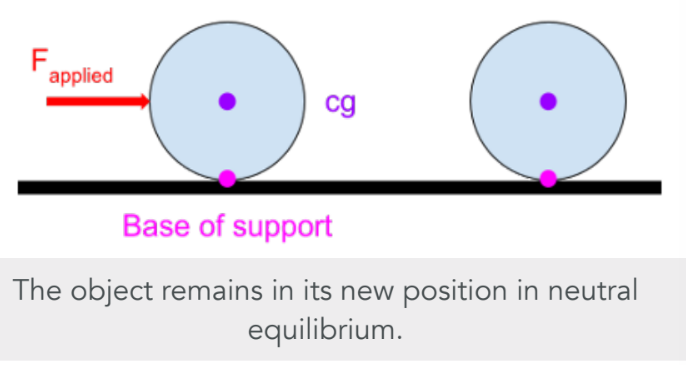
Neutral equilibrium
A system is in neutral equilibrium when, if displaced, it remains in its new position, such as a ball placed on a horizontal surface.
torque
a force that can cause a rotation of objects
τ = rFsinθ
τ (tau) is torque in newton meters (Nm)
r is the displacement from the axis to the point of contact of F in meters (m)
F is the force in newton (N)
θ is the angle between F and r
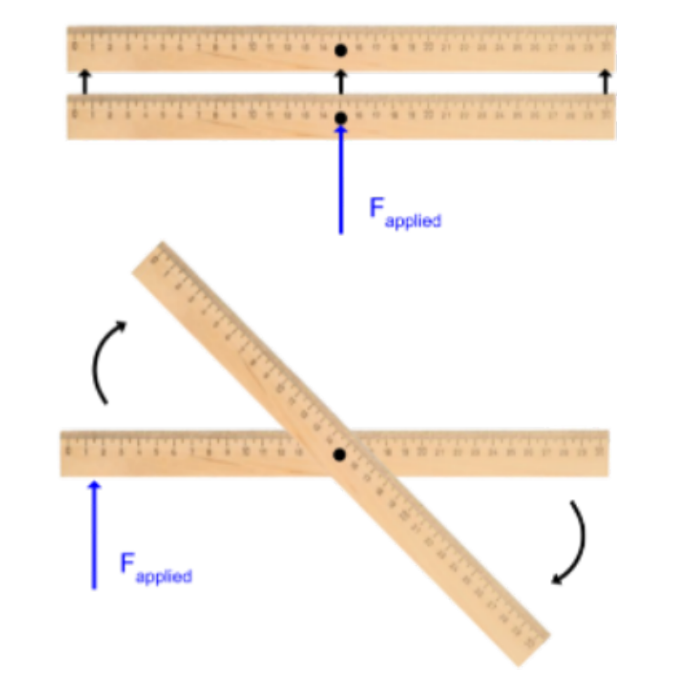
axis of rotation
the point through which the object rotates about
If you apply a force at the axis, the object will move.
If you apply a force at any other point, the object will rotate around the axis.
right hand rule
fingers are curled in the direction of rotation, the torque vector points in the direction of the thumb.
counterclockwise rotation is positive torque
clockwise rotation is negative torque
Solving problems for statics
Fnet = 0 = ∑F
∑τclockwise = ∑τcounterclockwise
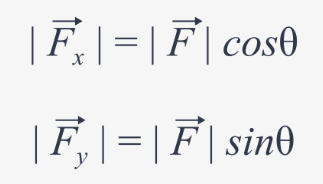
X and Y component
| Fx | = | F | cosθ
| Fy | = | F | sinθ
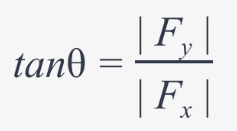
Magnitude

Unknown angle
Weight
Fg = mg