OCR MEI Core Pure
1/13
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
14 Terms
∫tan x dx
ln|sec x| + C
∫sec x dx
ln|sec x + tan x| + C
∫sec x tan x dx
sec x + C
∫cosec x dx
ln|cosec x - cot x| + C
∫cosec x cot x dx
-cosec x + C
∫cot x dx
-ln|cosec x| + C
d/dx [sec x]
sec x tan x
d/dx [cosec x]
-cosec x cot x
d/dx [cot x]
-cosec²x
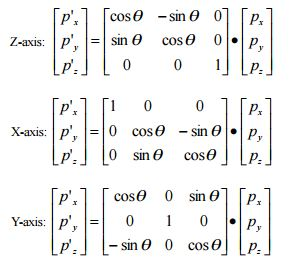
general rotation matrix
8 arrangements for 3 planes in 3d
det M ≠ 0:
one singular point of intersection
det M = 0:
3 parallel (distinct)
3 coincident
2 parallel, 1 intersects both
2 coincident, 1 intersects both
2 coincident, 1 parallel (distinct)
triangular prism
sheaf
sheaf
3 planes intersecting along a common line (line of infinite solutions)
types of solutions for planes in 3D
unique solution (1 point of intersection)
line of infinite solutions (sheaf)
plane of infinite solutions (3 coincident)
no solutions (all others)
invariant lines vs line of invariant points
line of invariant points - x,y maps to x,y. points off the line will be mirrored
invariant lines - point on the line maps to another point on the same line