Lecture 4: Second-Order Open-Loop Systems
1/51
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
52 Terms
A __________________ is one whose output, y(t), is described by the solution of a second-order differential equation.
second-order system
Parameters in Second Order Systems
τ = Natural period of oscillation of the system
ζ = damping factor
Kp= steady gain
Systems with second- or higher-order dynamics can arise from several physical situations, which can be classified into three categories:
Multi-capacity Processes
Inherently 2nd-order Systems
Processing Systems w/ Controller
processes that consist of two or more capacities (first-order systems) in series, through which material or energy must flow,
Multi-capacity processes
such as the fluid or mechanical solid components of a process that possess inertia and are sub- jected to acceleration.
Inherently 2nd order systems
Such systems are rare in chemical processes.
Inherently 2nd order systems
May exhibit second- or higher-order dynamics. In such cases, the controller which has been installed on a processing unit introduces additional dynamics which, when coupled with the dynamics of the unit, give rise to second- or higher-order behavior.
Processing Systems w/ Controller
The very large majority of the second- or higher-order systems encountered in a chemical plant come from _______________
multicapacity processes (or effect of process control systems)
form of the response y(t) will depend on the location of the ___________________ in the complex plane
two poles, p1 and p2
Three Cases of Second-Order Systems based on the Damping Factor (ζ) Values
CASE A: When ζ > 1, two distinct and real poles
CASE B: When ζ = 1, two equal poles (multiple pole)
CASE C: When ζ < 1, two complex conjugate poles
Case A is also known as
Overdamped response
resembles a little the response of a first-order system to a unit step input.
Overdamped response
But when compared to a first-order response we notice that the system initially delays to respond and then its response is rather sluggish.
Overdamped response
Overdamped response becomes slower and sluggish as ___ increases
ζ
Finally, we notice that as time goes on, the response approaches its ultimate value asymptotically.
Overdamped response
Overdamped are the responses of ______________________
multi-capacity processes
CASE B is also called
Critically damped response
a second- order system with _______________ approaches its ultimate value faster than does an overdamped system.
critical damping
CASE C is also called
Underdamped response
The ______________________ is initially faster than the critically damped or overdamped responses
underdamped response
Although the underdamped response is initially faster and reaches its ultimate value quickly, it does not stay there, but it ________________________________
starts oscillating with progressively decreasing amplitude.
The oscillatory behavior becomes more pronounced with smaller values of the ___________________—
damping factor, ζ
It must be emphasized that almost all the underdamped responses in a chemical plant are caused by the interaction of the _______________with the process units they control.
controllers
It is the ratio A/B, where B is the ultimate value of the response and A is the maximum amount by which the response exceeds its ultimate value.
Overshoot
It is the ratio C/A (i.e., the ratio of the amounts above the ultimate value of two successive peaks).
Decay Ratio
radian frequency (rad/time) of the oscillations
Period of oscillation
A second-order system with ζ=0 is a system free of any damping.
Natural period of oscillating
it will oscillate continuously with a constant amplitude and a natural frequency
Natural period of oscillating
The response of an underdamped system will reach its ultimate value in an oscillatory manner as t approaches infinity
Response time
For practical purposes, it has been agreed to consider that the response reached its final value when it came within ____ of its final value and stayed there.
+-5%
The time needed for the response to reach the response’s final value is known as the
response time
Different characteristics of underdamped response
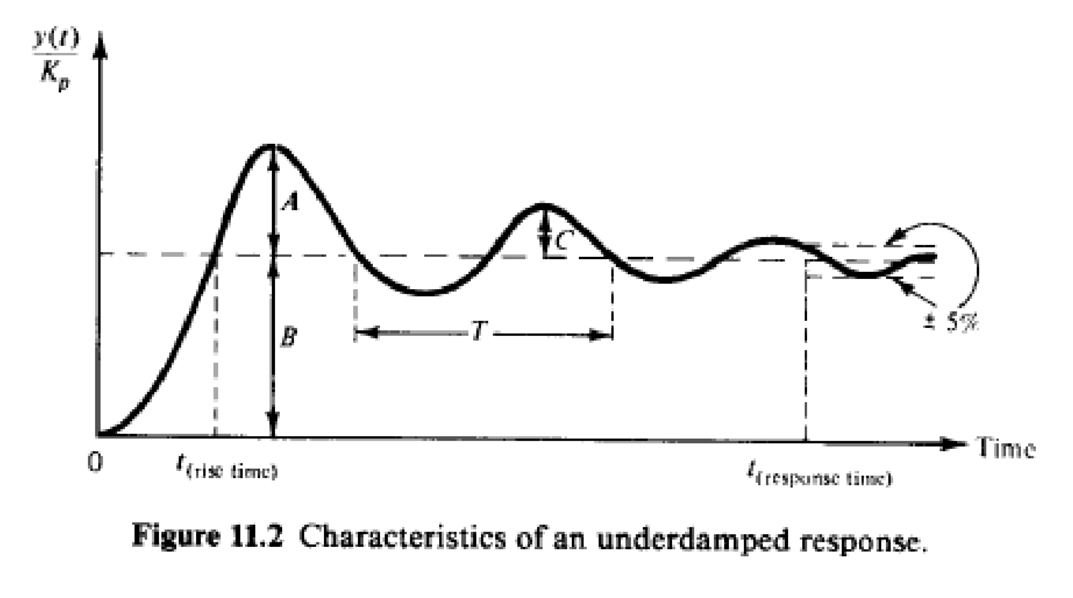
This term is used to characterize the speed with which an underdamped system responds.
Rise time
It is defined as the time required for the response to reach its final value for the first time
Rise time
Relationship between ζ and rise time
the smaller the value of ζ, the shorter the rise time, but at the same time the larger the value of the overshoot.
___________________ do not have to involve more than one physical processing unit.
Multicapacity processes
the first system affects the second by its output, but it is not affected by it
Noninteracting Capacities
|[f the time constants Tp1 and Ty are equal, the two poles are equal, therefore, noninteracting capacities always result in an ___________________ second order system.
overdamped or critically damped
The response of the overdamped multicapacity system to step input change is ___________
S-shaped
This is in contrast to a ____________, which has the largest rate of change at the beginning.
first-order response
Sluggishness in overdamped systems is also called
Transfer lag
This sluggishness or delay is also known as transfer lag and is characteristic of ___________________
multicapacity systems.
Relationship between number of capacities and sluggishness
As the number of capacities in series increases, the delay in the initial response (sluggishness) becomes more pronounced.
This is the distinguishing characteristic of ____________________ and indicates the mutual effect of the two capacities.
interacting capacities
it is noticeable that they differ only in the coefficient of s in the denominator by the term A1R2 (a.k.a. ___________________)
interaction factor
Relationship between interaction factor and interaction between tanks
the larger the value of A1R2 the larger the interaction between the two tanks.
Which is more sluggish, interacting or noninteracting systems?
Interacting capacities are more sluggish than the noninteracting.
Such a process can exhibit underdamped behavior. and consequently it cannot be decomposed into two first-order systems in series
Inherently Second-Order Processes
Inherently 2nd order systems occur rather rarely in a chemical process, and they are associated with the motion of liquid masses or the mechanical translation of solid parts, possessing:
(1) inertia to motion
(2) resistance to motion
(3) capacitance to store mechanical energy.
The value of the manipulated variable is determined by two terms, one of which is proportional to the error h', and the other proportional to the time integral of the error.
proportional-integral control
The control action described by eq. {11.36) is called proportional-integral control, because the value of the manipulated variable is determined by two terms:
proportional to the error h
proportional to the time integral of the error
Systems with inherent second-order dynamics can exhibit _________________________
oscillatory (underdamped) behavior