Locomotion solid surface
1/39
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
40 Terms
LOCOMOTION
The act or power of moving from place to place by means of one’s own mechanisms or power
Locomotion in human beings
In the human being, it is the result of the action of body levers propelling the body.
Ordinarily by lower extremities.
Occasionally by all four extremities.
Sometimes by upper extremities alone
Walking - Description
Alternating action of the two lower extremities.
Translatory motion of the body brought about by angular motion of some of its parts
Walking Phases
Two phases:
Swing
Support
Kinematics of Walking
Kinematics are often described in terms of strides and steps.
Stride: from heel strike to the next heel strike of the same leg.
Stride length: distance covered in one stride.
Step: from heel strike of one leg to heel strike of opposite leg
Stride:
from heel strike to the next heel strike of the same leg.
Stride length:
distance covered in one stride.
Step:
from heel strike of one leg to heel strike of opposite leg
Action of Upper Extremities in Walking
Arms tend to swing in opposition to the legs.
This reflex action is usually without obvious muscular action and serves to balance rotation of the pelvis.
Maximum flexion of shoulder and elbow occurs at heel strike of opposite foot.
Maximum extension of shoulder and elbow occurs at heel strike of same foot.
Mechanical Principles in Walking
Inertia of the body must be overcome with every step.
A brief restraining action of the forward limb serves as a brake on the momentum of the trunk so as not to move the center of gravity beyond the new base of support.
Translatory movement is achieved by alternating the lower extremity angular motion between the foot (support) and hip (swing) (inverted pendulum)
The vertical component of ground reaction force serves to counteract the pull of gravity.
The horizontal component serves to:
check forward motion during heel strike.
produce forward motion during toe off.
Speed is increased by increasing stride length, stride rate, or both.
Speed is directly related to magnitude of force and direction of application
Efficiency of locomotion partially depends on friction and ground reaction force.
Most efficient gait is one that is timed to permit pendular motion of the lower extremities.
Alternating loss and recovery of balance.
Lateral distance between feet is a factor in lateral stability, with average step width at ~ 10% of leg length
Walking Variations: Individual Variations in Gait
Variations may be structural or functional.
Structural: body proportions & limb differences.
Functional: personality characteristics
Pathological Walking Variations
disease, injury, or deformity may produce deviations
Age Walking Variations
decreases in strength and flexibility.
Balance becomes a concern
Obesity Walking Variations
increased impact but smaller propulsive forces.
Medial and lateral forces increase
Up stairs or a ramp:
Forward lean of body to direct the push of legs through the body’s center of gravity.
Swing phase has exaggerated knee lift and dorsiflexion of the ankle.
Downstairs or a ramp:
Eccentric contraction of muscles to lower body at a controlled rate and maintain line of gravity toward back of the base of support.
Swing phase has a slight lifting of rear foot to clear the step
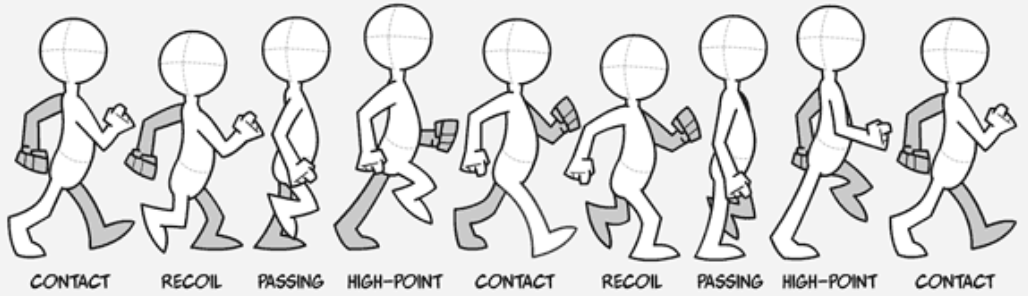
Running Vs Walking
Running is different from walking, because there is no double support phase
Running
Running has a flight phase.
Speed is the product of stride duration and stride length
Two major types of running
Races: concerns are time and distance.
Games and sports: also concerned with change of direction, pace, and stability.
Races:
concerns are time and distance.
Games and sports:
concerned with change of direction, pace, and stability.
Speed is governed by
length and frequency of stride.
Stride Length
Stride Rate
Stride length:
determined by length of leg, ROM of hip, and power of leg extensors.
Stride rate:
determined by speed of contraction and skill of performer.
During Running, the body becomes a projectile and depends on:
Angle of take off.
Speed of projection.
Height of center of gravity at takeoff & landing
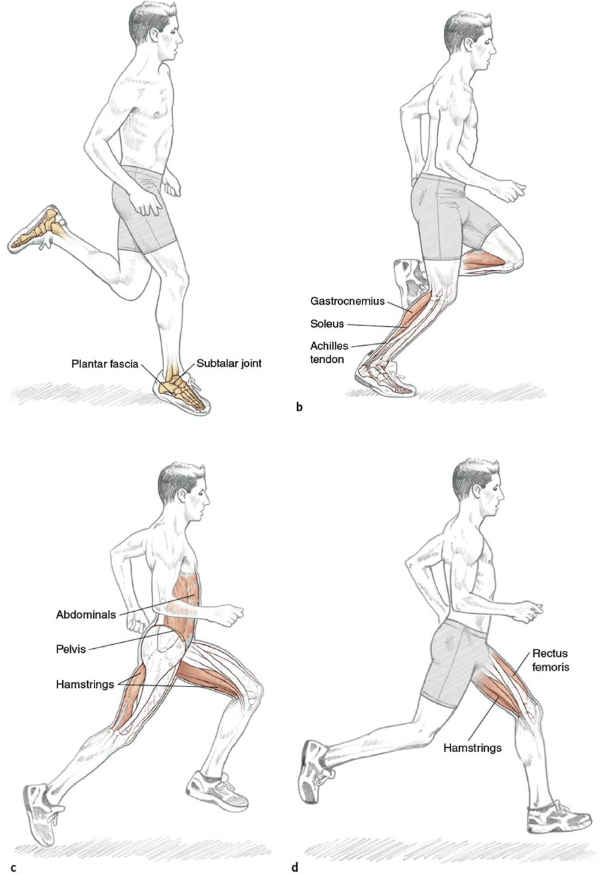
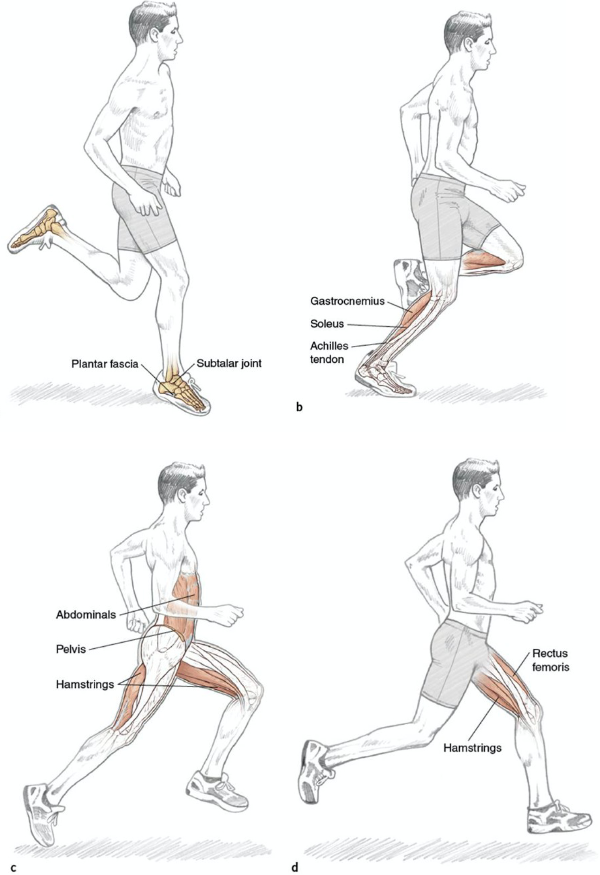
Mechanical Principles in Running
Inertia must be overcome. The problem of inertia decreases as speed increases.
Acceleration is directly proportional to power in the leg drive.
The smaller the vertical component of ground reaction force the greater the horizontal (driving) component.
The more horizontal force directed straight backward, the greater the contribution to forward motion of the body.
The length of leg in the driving phase should be as great as possible when speed is a consideration.
By flexing the free leg at the knee and carrying the heel high up under the hip, the leg is moved more rapidly & economically.
The force of air resistance can be altered by shifting the center of gravity.
Jumping, hopping, and leaping — GOAL
Goal is to propel the body into the air with sufficient force to overcome gravity & in the direction to accomplish the desired height or horizontal distance
Jumping, hopping, and leaping
Path of the body is determined by the conditions at the instant of projection.
Differences between jumps related to the take off and landing.
Hop:
the same foot is used for the take off and landing.
Leap:
take off is from one foot and landing is on the other foot.
Jump:
take off from one or both feet and land on both feet.
Hop, Leap, and Jump are similar bc…
Each may be initiated from a stationary position or preceded by some locomotor pattern.
Mechanical Principles in Jumping, Hopping, and Leaping
For movement to occur, inertia must be overcome.
Use of the stretch-shortening cycle will enhance jump.
Jumpers project themselves into the air by exerting a force against the ground that is larger than the force supporting their weight.
The upward thrust of the arms in the jump accelerates the support leg downward, which causes a reaction from the ground.
The magnitude of the impulse that the jumper exerts against the ground is a product of the applied forces and the time over which they act.
The path of motion of the center of gravity is determined by the angle at which it is projected, speed of projection, height of the center of gravity at take off, and air resistance.
Angular momentum may be developed by the sudden checking of linear motion or by an eccentric thrust.
Bicycle
Cycling motion has no braking or retarding phase.
Little kinetic energy is wasted.
Speed is determined by slope, gear ratio and pedal cadence.
Force producing pedal revolution is provided by a cyclic extension-flexion motion of the lower extremities.
Magnitude of force depends on gear ratio
Roller (In-line) Skates
Movement is cyclic but not continuous.
Force is produced by each leg in turn, with a period of glide occurring between strokes.
During the glide there is a loss of velocity from friction.
Highly efficient during downhill motion
Wheelchair
Similar to skating: cyclic but not continuous.
Propulsive arc of 50°-100°.
Variability based on level of disability, chair type, surface, slope, etc.
Brief braking period at hand contact.
In racing, camber brings push rim closer to hands.
Ice Skating
Very little friction between blades and ice.
Friction further reduced by slight melting from pressure of the blade.
Blade sinks into ice and can be used to push off perpendicular to direction of travel.
Ice (Speed) Skating
Speed is based on stride length and stride rate.
Trunk is inclined forward to reduce drag from air resistance.
Skiing: Cross-Country
Closely related to walking, running, and ice skating.
Diagonal stride vs. skate stride.
Skiing: Alpine or Downhill
Relies primarily on gravity for a propulsive force.
At high speeds air resistance plays a role; drag must be reduced through compact body position.