matrix midterm 2
1/40
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
41 Terms
In terms of composition what does S followed by V mean?
V · S
cause it means apply transformation to s then apply to v so
s(x) → V(s(x)) which is V dot S
in terms of composition what does S following V mean?
S · V
cause it means apply transformation to v then apply to s so
v(x) → S(v(x)) which is S dot V
what are varibles?
number of coloumns
List of allowed elementary row operations
swap rows
multiply row by a constant
Ri → Ri + cRj
not allowed
Ri → cRi + Rj
Column of zeros + free varibles( key reminder)
column of zeros does not mean the variable = 0
Just means that the varible never appears in eqs, so nothing restricts it
In the solution vector, this free variable shows up only in its own position, and all other entries are 0.
here if x1 is free varible s, only x1=S
what does it mean if u have more rows than columns
more equations than unknowns
The maximum rank of the matrix is the smaller dimension, so rank has to be less than or equal to number of col
matrix still can potentially be IND
what to do with zero row?
most of time ignore
adds no new info - doesnt count toward rank
homogeneous system def
system of linear eqs where right hand side is all zeros:
Ax=o
(row reduce with answer side all 0)
2 possible solutions
only trivial solution ( all variables, x1,x2,x3 =0- it’s IND)
INF many solutions, if theres free variables
matrix algreba action words!!
Find the span | describe all combinations |
Find a basis | remove dependent vectors |
Find dimension | count independent vectors |
Solve Ax=b | row reduce |
Find the null space | solve Ax=0 |
Find a homogeneous system for a span | convert span → equations |
rotation matrix
stretching standard matrix
stretches are in 1 direction
contractions and dilation standard matrix
transforms vectors in all directions by same factor
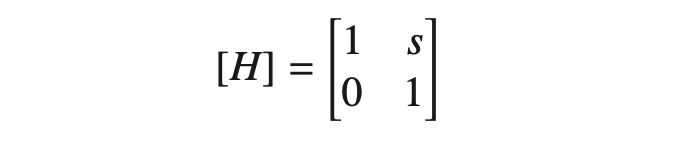
horizontal shear standard matrix
force applied to rectangle causing it to deform into parallelogram
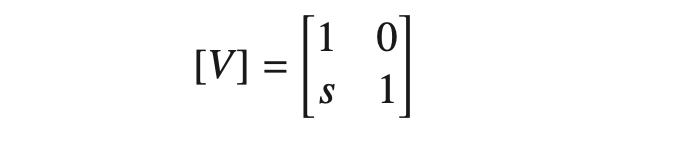
vertical shear standard matrix
force applied to rectangle causing it to deform into parallelogram
reflection standard matrix
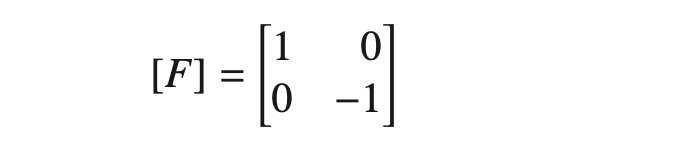
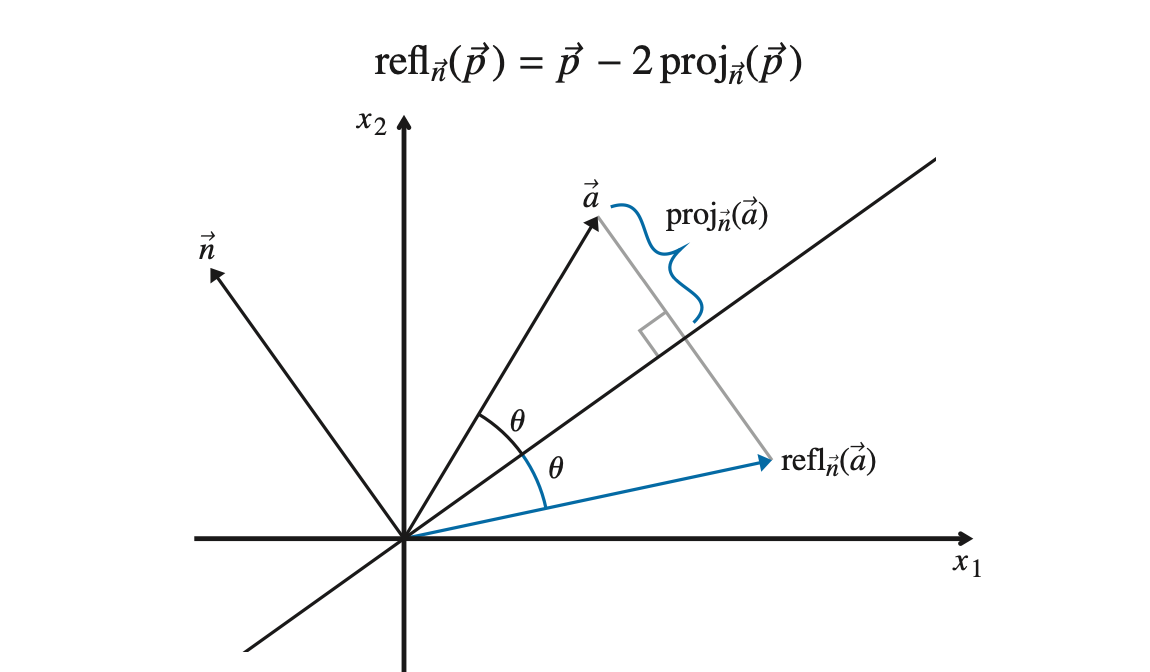
general reflection equation
if p does not lie in the plane, f(p)= a vector that corresponds to opp side of the plane
f(p) and p are connect by a line that is perp to the plane of reflection , they are equal distance from plane
if you are not given point p, just use standard basis vectors to find standard reflection matrix!!
about the eq: subtracting p from the projection on n once removes it, subtracting it again flips it to opp side i think?
Range(L)
Range is every transformation of L onto every possible x.
all outputs that survive linear mapping, L,
Nullspace(L)
Nullspace of linear mapping , L, are all vectors who get transformed into zero vector by L
another word for Null space is kernal
often described by set of parameters
4 fundamental spaces + descriptions
Col space: Range of linear mapping
Null space: all vectors that get crushed to 0 thru linear mapping
Row space: All non zero rows of reduced matrix?
Left null space: Null (A^T) , all vectors that get crushed to 0 thru col space transposed
Dimension count formula ( general)
Dim of span(# of pivots) + num of IND eqs(free cols) = R^n ( pls rearrange as needed!)
3 inverse properties
(sA)-1 = 1/s A-1
(AB)-1 = B-1 A-1
(AT)-1 = (A-1)T
determinant of 2×2 matrix
determinant of 3×3 matrix
Sign pattern follows:
+-+
-+-
+-+….

determinant of larger matrices
row reduce to upper triangle ( along diagonal ofc)
row reducing operation rules:
if u swap 2 rows, determinant changes sign
if u multiple row by k, determinant gets multiplied by k
if u add multiple of one row to another, nothing changes
once row reduced to upper triangle
multiply the diagonal
Big theorem ( partly)
If A is invertible the det(A) ≠0
main property of determinants
det(AB)=det(A)det(B)
what does more cols than rows mean?
usually has INF solutions ( if consistent)
cannot be lin IND
null space is non trivial ( there are free cols!)
matrix multiplication transposed rules
(AB)T = BT AT order specific ofc!
what defines if a mapping is linear?
if it is closed under linear combination!
preserves addition
preserves scalar multiplication
finding row space
Row reduce matrix
take non zero rows of resulting matrix
these rows form basis of row space
repersent as cols
rank nullity theorem
Rank(A) + dim(Null(A)) = number of coloumns ( not dim of A)
Converting to coordinate notes
easier to convert smth non standard into the standard basis ( rather than vice versa)
Nonstandard basis can be exspressed simply by coefficants = standard basis
create matrix
then use matrix to convert other coordinates ( most of time need to find inverse matrix converting from standard to non standard)
ORR
- find the coefficiants that equal the coordinate were solving for in terms of the basis we’re converting udner
det rules
det(A) = det(AT)
for A to be invertible det(A)=/=0
if any rows or cols are all 0, det(A)=0
det(kA) = kⁿdet(A) where n is the size of the matrix
If A is triangular (upper or lower) → det = product of diagonal entries
If A is invertible → det(A⁻¹) = 1/det(A)
determinate of identity matrix is always 1
determinate row/cols signs pattern
odd rows/cols = +-+-
even rows/cols = -+-+
inverse of gen matrix
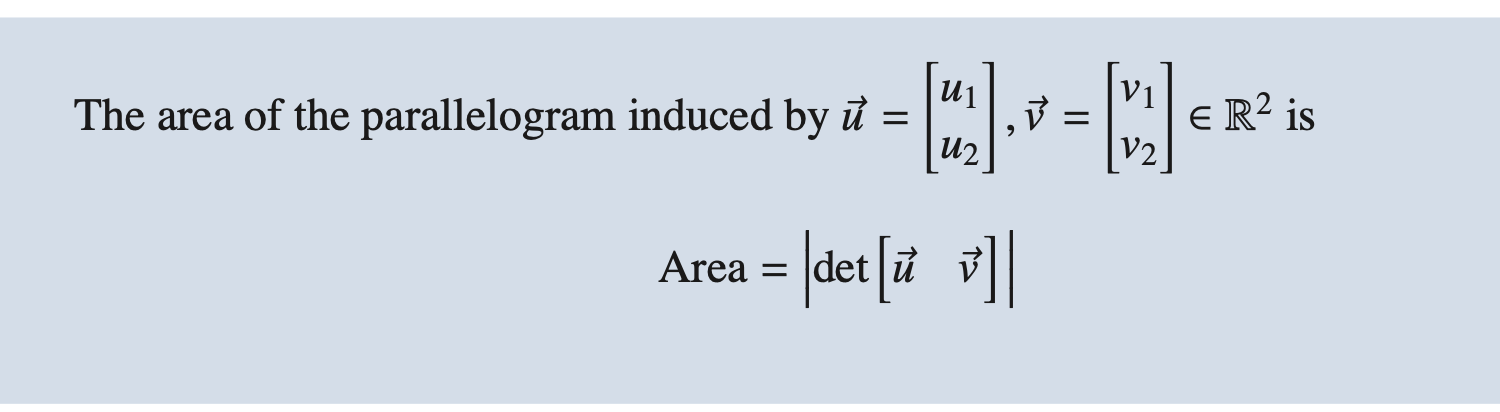
5.4 ( det + area of parrelolgram)
det(A) is how a parallelogram scales in area
- if matrix is not invertible, area goes to 0 ( like det)
R3 rotation matrix around x axis ( similar to around z axis)
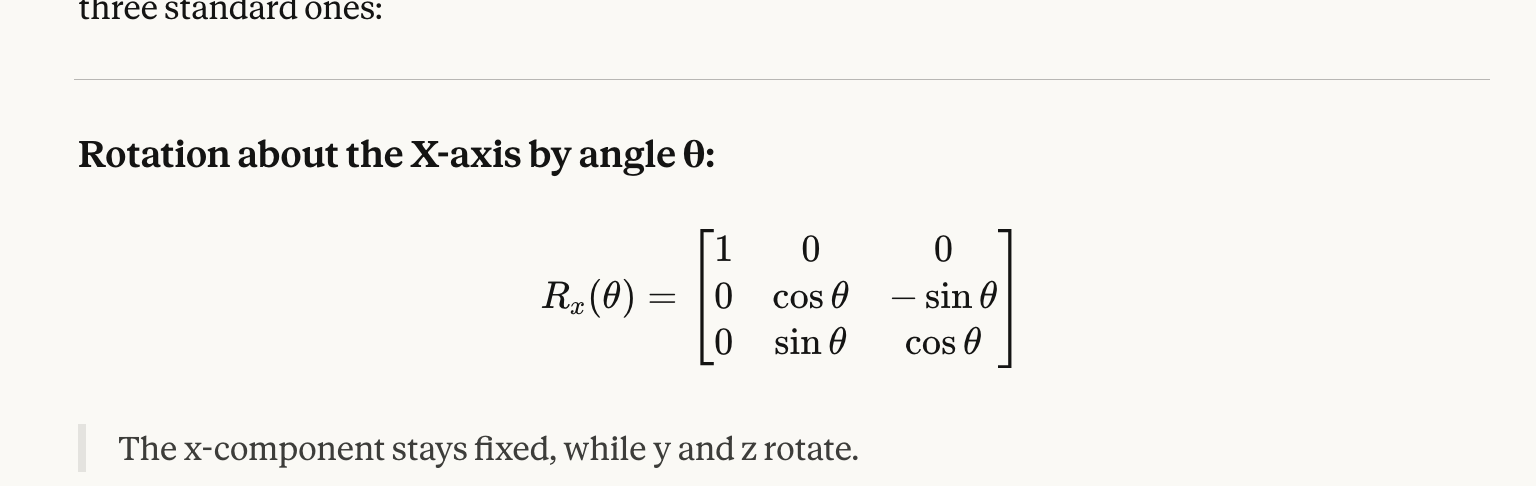
R3 rotation matrix around y axis
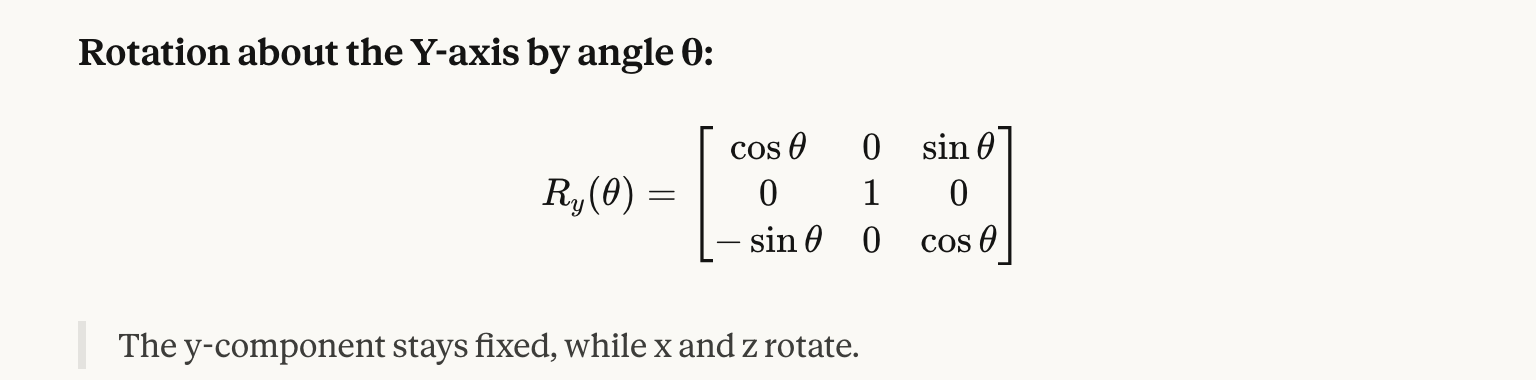
sin flipped
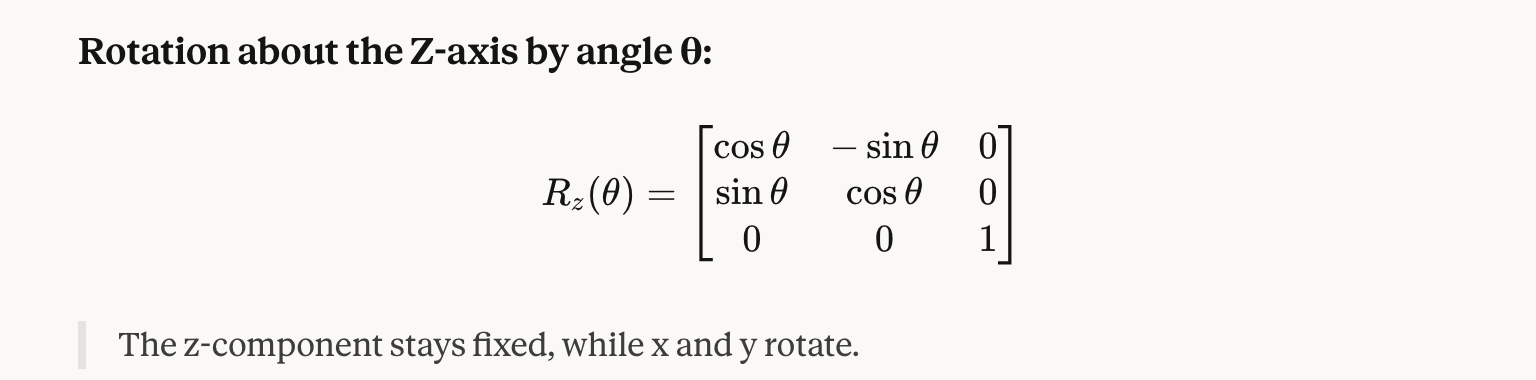
R3 rotation matrix around z axis
standard one
how to rotate aroun multiple axis
multiplying rotation matrices together - order matters ( its a composition of funtions) so think of it like rotate around X axis followed by Z axis which means [Z][X]
det inverse rule
If A is invertible… det(A-1) = 1/det(A)