Final Exam MATH 136
1/125
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
126 Terms
A set of vectors { v 1, . . . , v k} in Rn is linearly dependent if…

If v 1, . . . , v k ∈ Rn, then…

Suppose that v , w, x ∈ R3 and c ∈ R.
Let v , w, b ∈ R3 with { v , w} being linearly independent and let P be a plane in R3 with
vector equation x = s v + tw + b , s, t ∈ R. If n = v × w, then an equation for the plane
is…

Definition: Projection onto a Line in Rn
Perpendicular of a Projection in Rn

Projection and Perpendicular onto a Plane in R3
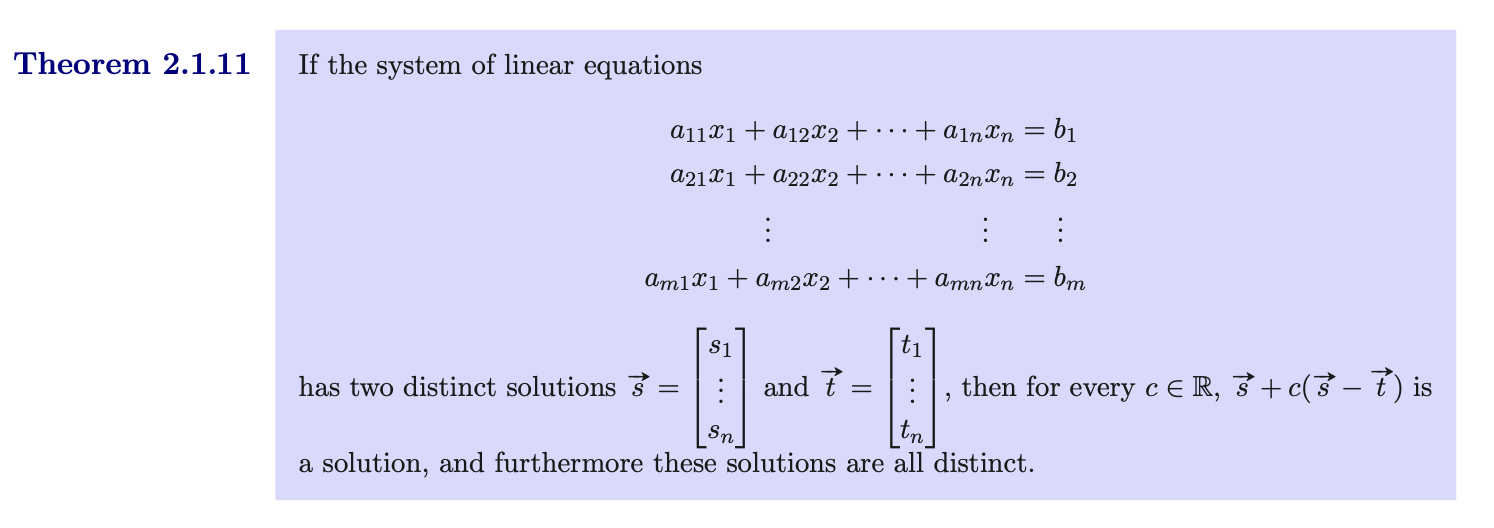
If the system of linear equations s and t…
How to prove Span{something} = Span{something}
To prove Span{something} = Span{something}, show that each is a subset of each other. Like proving S=T in MATH 135
A basis always has exactly…
A basis always has exactly n vectors in Rn
How to justify if B is a basis for Rn
To justify if B is a basis for Rn, you must show:
Linear independence
that SpanB = Rn
A basis for a span IS the spanning vectors if..
A basis for a span IS the spanning vectors if they are linearly independent; if not, you remove redundancy
The number of basis vectors equals…
The number of basis vectors equals the dimension
The line S= {t v + b | t ∈ R} is a subspace of Rn if…
The line S= {t v + b | t ∈ R} is a subspace of Rn if and only if b is a scalar multiple of v.
How to prove B is not a basis for Rn
To prove B is not a basis for Rn, show there exists a vector in Rn that cant be written with the vectors from said basis
Squares, cubes, absolute values, sines, exponentials are
Squares, cubes, absolute values, sines, exponentials are non-linear, so they almost never work as subspaces
how to Prove that {x,y} is linearly independent
When a problem says “Prove that {x,y} is linearly independent,” it is asking you to assume c1x +c2y = 0 (the def’n of linear independence) and to show that c1 c2=0 is the only true solution for it
True or False: It is impossible to find a solution to a system of linear equations that has more un-
knowns than equations.
False. Take the system { x1 +x2 +x3 = 3, x1 = 1, for example.
The solution set of a homogeneous system of m linear equations in n variables is…

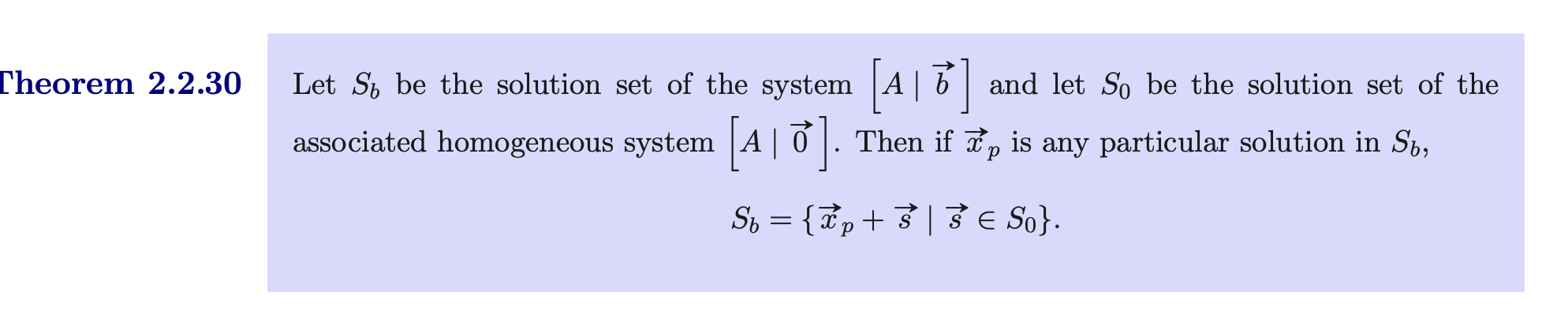
Let Sb be the solution set of the system A | b and let S0 be the solution set of the
associated homogeneous system A | 0 . Then if x p is any particular solution in Sb,
For any m × n matrix A we have

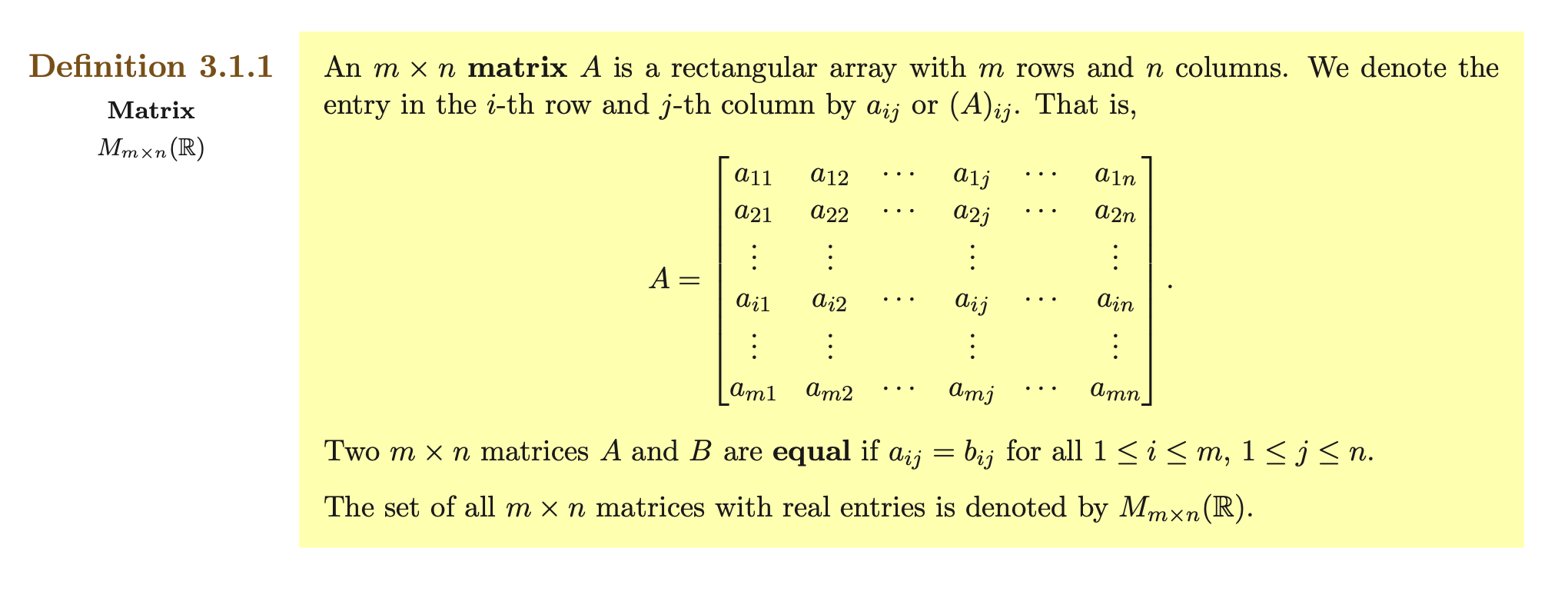
Definition: Matrix
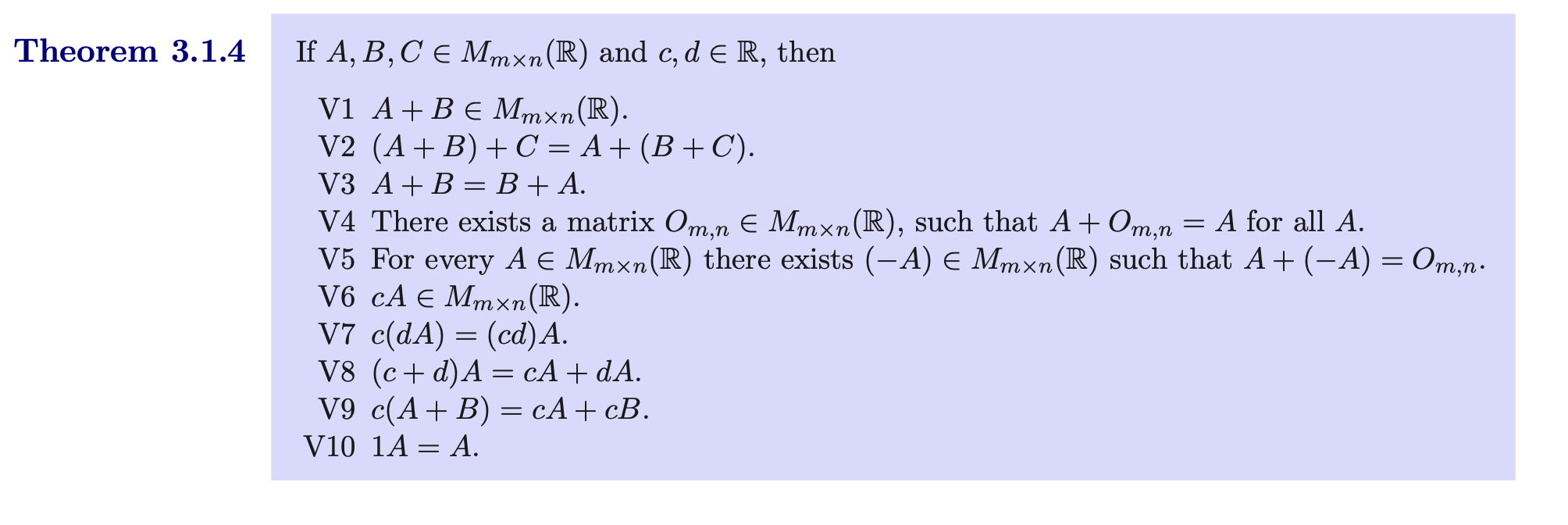
If A, B, C ∈ Mm×n(R) and c, d ∈ R, then…
Definition: Transpose
Definition: Matrix-Vector
Multiplication
(Column Extraction Theorem) If e i is the i-th standard basis vector and A= [a 1· · · a n] , then…

If x , y ∈ Rn, then x^Ty = …

If A ∈ Mm×n(R), x , y ∈ Rn and c ∈ R, then

Definition: Matrix Multiplication

If A, B, and C are matrices of the correct size so that the required products are defined,
and t ∈ R, then…
(Matrix Equality Theorem)

If I= [e 1· · · e n] , then for any n × n matrix A we have…

Definition: Identity Matrix
If A is an m × n matrix and f : Rn → Rm is defined by f ( x ) = A x , then for all x , y ∈ Rn
and b, c ∈ R we have…

Definition: Linear Mapping Linear Operator
If L : Rn → Rm is a linear mapping, then L(0) = …

Every linear mapping L : Rn → Rm can be represented as a matrix mapping with matrix
whose i-th column is the image of the i-th standard basis vector of Rn under L for all
1 ≤ i ≤ n. That is, L( x ) = [L] x where…

Definition: Standard Matrix

If Rθ : R2 → R2 is a rotation with rotation matrix A = [Rθ],

Definition: Range

If L : Rn → Rm is a linear mapping, then Range(L) is…

Definition: Onto

Definition: Kernel

If L : Rn → Rm is a linear mapping, then Ker(L) is…

Definition: One-to-One

Let L : Rn → Rm be a linear mapping. L is one-to-one if and only if for every u , v ∈ Rn
such that...

Let L : Rn → Rm be a linear mapping with standard matrix [L]. Then, x ∈ Ker(L) if and only if…

Let A ∈ Mm×n(R). The set { x ∈ Rn | A x = 0 } is…

Definition: Nullspace

Let A be an m × n matrix. Suppose that the vector equation of the solution set of A x = 0
as determined by the Gauss–Jordan algorithm is given by
x = t1 v 1 + t2 v 2 +· · · + tk v k, t1,…,tk ∈ R, then…
If A is an m × n matrix, then
dim Null(A) = …

Definition: Nullity

If L : Rn → Rm is a linear mapping with standard matrix [L] = A= a 1· · · a n , then
Range(L) = …

Definition: Column Space

If L : Rn → Rm is a linear mapping with standard matrix [L] = A= a 1· · · a n , then
Range(L) = …

Let A be an m × n matrix and let b ∈ Rm. Then b ∈ Col(A) if and only if…

Let A = [a1 … an] be an m x n matrix. Suppose that rank A = r and that the RREF of A has leading ones in columns j1,…, jr. Then {aj1, …, air}…

(Rank-Nullity Theorem) If A is an m × n matrix, then

Definition: Row Space Left Nullspace
Let A be an m × n matrix. Then
dim Col(A) = …
Definition: Addition Scalar Multiplication

If L, M : Rn → Rm are linear mappings and c ∈ R, then L + M : …

Definition: Composition

If L : Rn → Rm and M : Rm → Rp are linear mappings, then M ◦ L : …

Definition: Identity Mapping

Definition: Left and Right Inverse

If A is an m × n matrix, then
(1) A has a right inverse if…

If A, B, and C are n × n matrices such that AB= I= CA, then…

Definition: Matrix Inverse

An n × n matrix A is invertible if…

If A and B are n × n matrices such that AB= I, then

If A and B are invertible matrices and c ∈ R with c ̸= 0, then

… A−1 = …

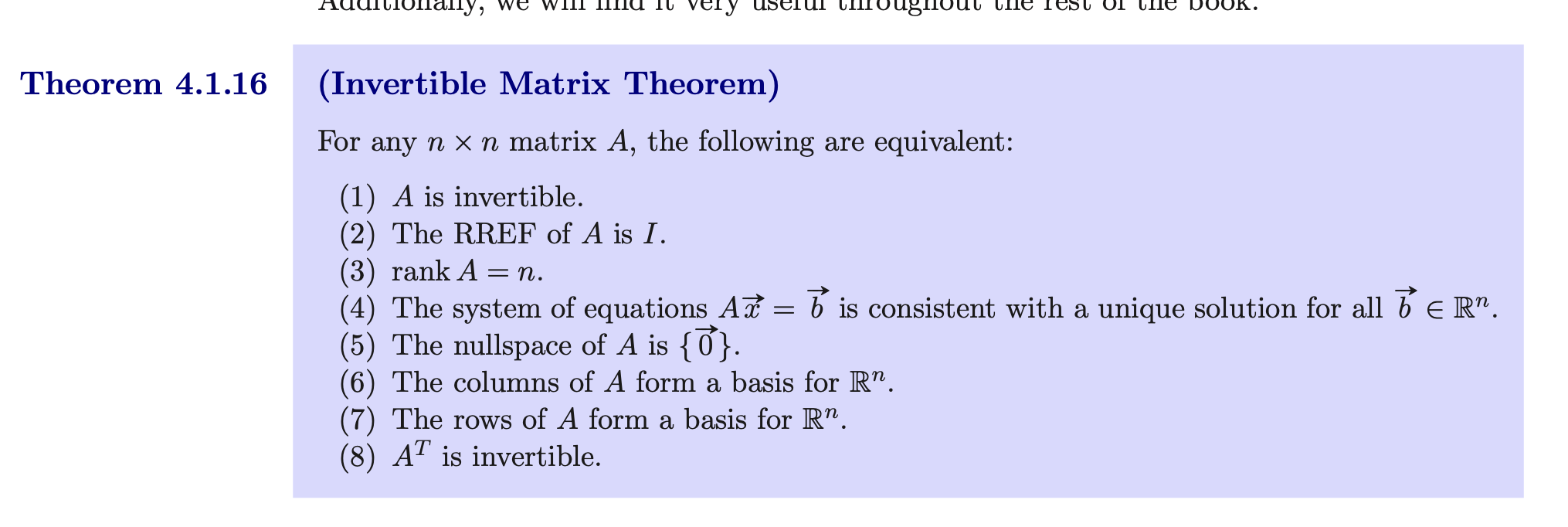
Invertible Matrix Theorem
Definition: Elementary Matrix

If E is an elementary matrix, then…

If A is an m × n matrix and E is the m × m elementary matrix corresponding to the row
operation Ri + cRj , for i ̸= j, then…

If A is an m × n matrix and E is the m × m elementary matrix corresponding to the row
operation cRi, then

If A is an m × n matrix and E is the m × m elementary matrix corresponding to the row
operation Ri ↔ Rj , for i ̸= j, then…

If A is an m × n matrix and E is an m × m elementary matrix, then…

If A is an m × n matrix with reduced row echelon form R, then…

If A is an n×n invertible matrix, then A and A−1 can…

If E is an m × m elementary matrix, then E^T…

Definition: 2×2 Determinant

Definition: Cofactor

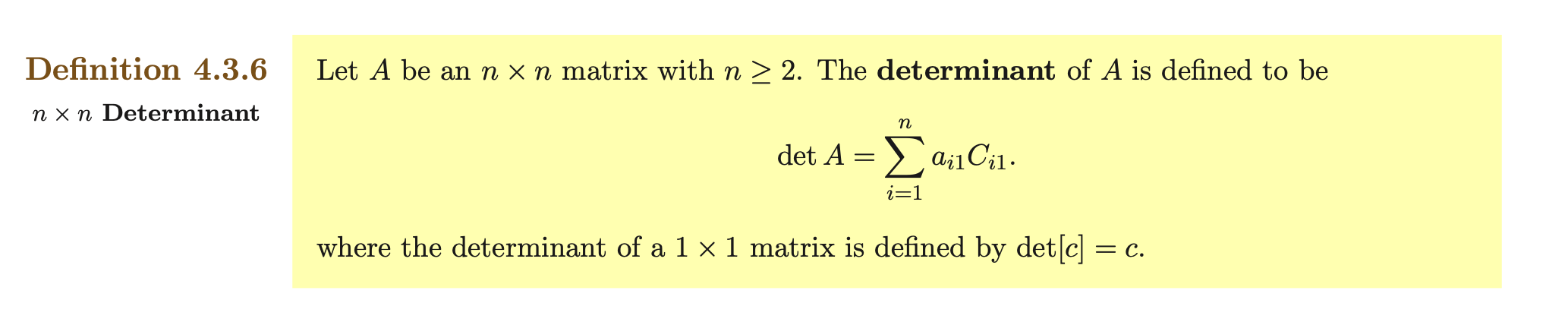
Definition: nxn Determinant
Definition: Upper Triangular, Lower Triangular

If an n × n matrix A is upper triangular or lower triangular, then
det A = …

If A is an n × n matrix and B is the matrix obtained from A by multiplying one row of A
by c ∈ R, then det B = …

If A is an n × n matrix and B is the matrix obtained from A by swapping two rows of A,
then det B…

If an n × n matrix A has two identical rows, then det A = …

If A is an n × n matrix and B is the matrix obtained from A by adding a multiple of one
row of A to another row, then det B = …

If A is an n × n matrix and E is an n × n elementary matrix, then
det EA = …

Addition to The Invertible Matrix Theorem

If A and B are n × n matrices, then det(AB) = …

If A is an invertible matrix, then det A−1 = …

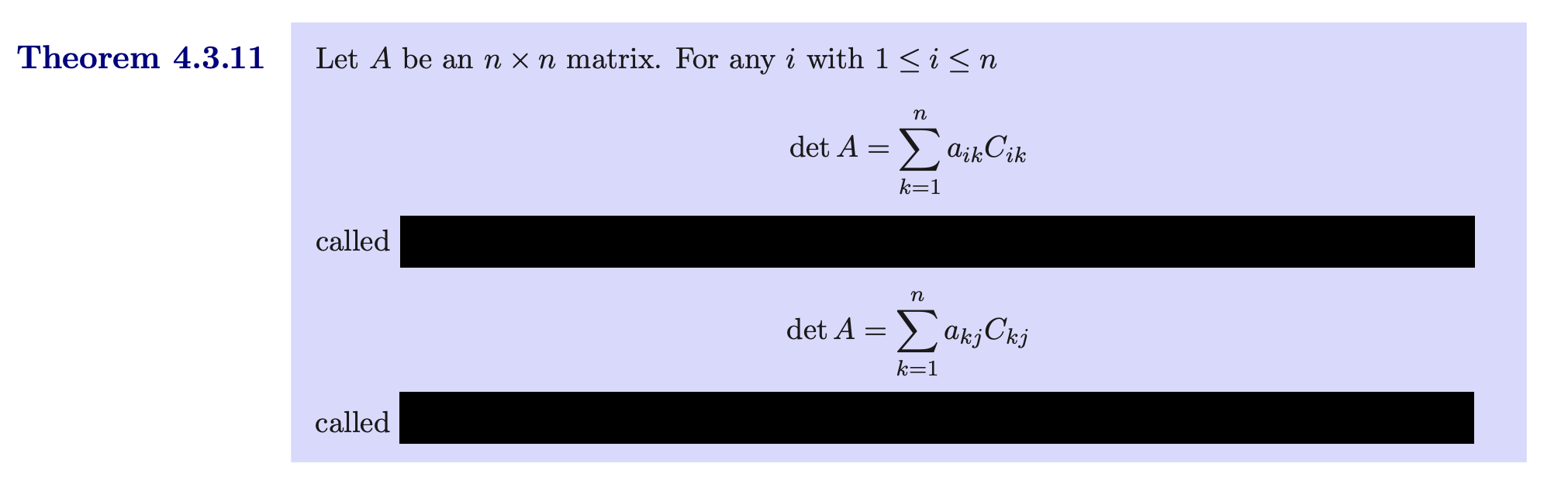
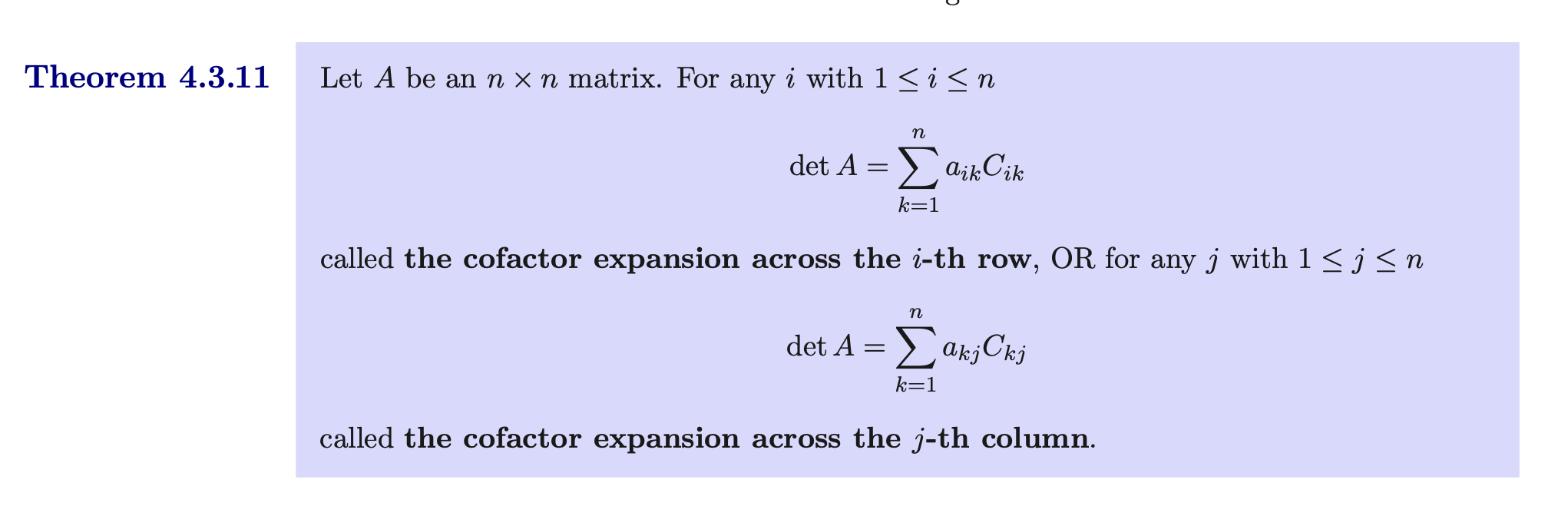
If A is an n × n matrix, then det A = …

If A is an n × n matrix with cofactors Cij and i ̸= j, then…