calc3 :::::::))))))))))))))))))))) love and happiness and sparkles and yayayayayay
1/98
Earn XP
Description and Tags
yayayayayay dontfail yayayayyaya
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
99 Terms
cos²(θ)+sin²(θ)=
1
1+tan²θ=
sec²θ
I+cot²θ=
csc²θ
sinθ/cosθ=
tanθ
cosθ/sinθ=
cotθ
1/cosθ=
secθ
1/sinθ=
cscθ
d/dx (f(x)g(x)) =
f(x)g’(x) + f’(x)g(x)
d/dx(f(x)/g(x)) =
g(x)f’(x) - f(x)g’(x) / (g(x))²
d/dx (f(g(x))) =
f’(g(x))g’(x)
d/dx (e^x) =
e^x
d/dx (ln(x)) =
1/x
d/dx (sin(x)) =
cos(x)
d/dx ( cos(x)) =
-sin(x)
d/dx (tan(x)) =
sec²(x)
d/dx (sec(x)) =
sec(x)tan(x)
d/dx (csc(x)) =
-csc(x)cot(x)
d/dx (cot(x)) =
-csc²(x)
d/dx (arcsin(x)) =
1/root(1-x²)
d/dx (arccos(x)) =
-1/root(1-x²)
d/dx (arctan(x)) =
1/(1+x²)
a dot b =
magnitude(a)*magnitude(b)*cosθ, where θ is the angle between the vectors a and b
a cross b =
magnitude(a)*magnitude(b)*sinθ, where θ is the angle between the vectors a and b
projab =
((a dot b)/(a dot a))*a
The distance D from a point P1 to a line l with direction vector L is given by
D = magnitude(L cross (P0-P1) / magnitude(L), where P0 is any point on the line l
Given a vector-valued function with a parametrization r(t): R → R³, we can define the Frenet frame:
T(t) = (r’(t)/magnitude(r’(t)))
N(t) = (T’(t)/magnitude(T’(t)))
B(t) = T(t) cross N(t)
The arc length function for a curve parametrized by r(t): R → R³ is
s(t) = integral from 0 to t of magnitude(r’(t) *dt
The tangential and normal componenets of acceleration are given by
a(t) = aT(t)T(t) + aN(t)N(t)
aT(t) = d/dt * magnitude(r’(t))
aN(t) = magnitude(r’(t))*magnitude(dT/dt)
The second derivative test for unconstrained optimization
Suppose that (x,y) is a critical point of f(x,y) (which is a point such that fx(x,y) = 0 and fy(x,y) = 0). At the critical point, compute the quantity D(x,y) = fxx(x,y)fyy(x,y) - [fxy(x,y)]².
If D>0 and fxx(x,y)>0, then (x,y) is a local minimum
If D>0 and fxx(x,y)<0, then (x,y) is a local maximum
If D<0, then (x,y) is a saddle point
If D = 0, the test is inconclusive
The method of Lagrange multipliers for constrained optimization
To optimize f(x,y) subject to a constraint g(x,y) = c for some constant c, find all critical points tot he constrained optimization problem as solutions to the system: gradient(f(x,y)) = lambda*(gradient(g(x,y))), g(x,y) = c, for a real number lambda called a Lagrange multiplier.
Surface area of the graph of z = f(x,y) above the region R in the xy plane is
A = (double integral over R) root(1 + magnitude(gradient f(x,y))²)dA = (double integral over R) root(1+ [fx(x,y)]² + [fy(x,y)]²)dA
polar coordinates
x = rcosθ
y = rsinθ
dA = rdrdθ
cylindrical coordinates
x = rcosθ
y = rsinθ
z = z
dV = rdzdrdθ
spherical coordinates
x = rho sin(phi)cosθ
y = rho sin(phi)sinθ
z = rho cose(phi)
tan(phi) = r/z
dV = rho²sin(phi)d(rho)d(phi)dθ
Change of variables: jacobian, formula
jacobian: d(x,y)/d(u,v) = (dx/du)(dy/dv) - (dx/dv)(dy/dv)
change of variables: double integral over R of f(x,y)dxdy = double integral over R’ of f(u,v) (ABS VAL OF d(x,y)/d(u,v)) dudv, where R’ is the region R transformed to (u,v) variables and f(u,v)= f(x(u,v), y(u,v))
tangential component of acceleration using velocity
aT(t) = (v dot a) / magnitude(v)
how to find an equation of the plane containing points 1, 2, 3
p2-p1 = v1
p3-p2 = v2
normal vector = v1 cross v2, result ijk are your xyz coefficients
then plug any one of your original points in to that expression to find the right-hand side scalar
how to show that a line is parallel to a plane
dot product must be 0
how to find distance from line to plane
line equation: (point) + t
cos²(pi/4)=
1/2u
v and w are perpendicular if
v dot w = 0how
how to know if two planes are parallel
two planes are parallel if their normal vectors are scalar multiples of one another
how to determine the symmetric equation of a line containing a point and parallel to both of the planes.
To be parallel to both planes, the line must be perpendicular to both normal vectors → cross product
result are your abc denominators
numerators are x-x0, y-y0, z-z0
sphere standard form
(x-h)²+(y-k)²+(z-l)²=R²
how to complete the square
take half of b and square it, add to both sides
how to find the points where a curve intersects a sphere
sub in x=i, y=j, z=k of the parametrization to the sphere equation
solve for t and plug back into parametrization to find a specific point
how to find r(t) from v(t)
r(t) = integral of v(t)
Equation of a tangent plane
Fx(x0,y0,z0)(x-x0)+Fy(x0,y0,z0)(y-y0)+Fz(x0,y0,z0)=0
directional derivative
Dvf= gradient of f dot u
where u is just the unit vector of whatever direction vector is given
Distance between point P1 and a plane
find the normal vector of the plane, dot w P1-P0, abs val of that
divide by magnitude of normal vector
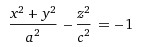
hyperboloid of two sheets (surface)
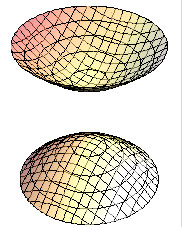
hyperboloid of two sheets (equation)
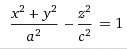
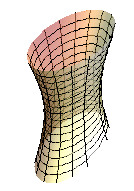
one‐sheeted hyperboloid (Surface)
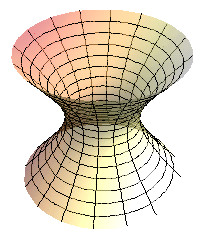
one‐sheeted hyperboloid (Equation)
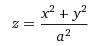
paraboloid (surface)
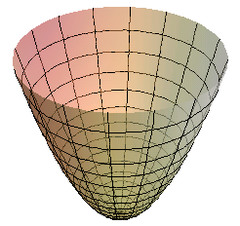
paraboloid (equation)
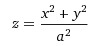
cone (surface)
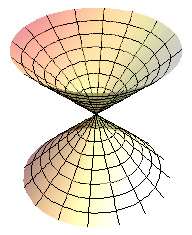
cone (equation)
ellipsoid (surface)
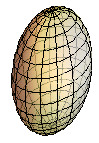
ellipsoid (equation)
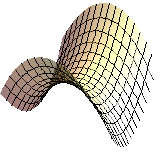
one-sheeted elliptical hyperboloid (surface)
one-sheeted elliptical hyperboloid (equation)
hyperbolic paraboloid (surface)
hyperbolic paraboloid (equation)

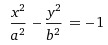
hyperbolic cylinder (surface)
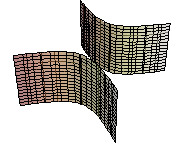
hyperbolic cylinder (equation)
elliptic cylinder (equation)
(x/a)² + (y/b)² = 1
arc length formula
L([a, b]) = integral from a to b of the magnitude of r’(t) dt
d/dx(integral from 1 to x² of et dt) =
ex²(2x)
direction of maximal increase/decrease
max increase = gradient f
max decrease = - gradient f
max rate of increase/decrease
max rate of increase = magnitude of gradient f
max rate of decrease = - (magnitude of gradient f)
how to find the point with the smallest x-coordinate w constraint
f(x,y) = x bc thats what you’re optimizing, g(x,y) = constraint equation
gradient f = lambda gradient g, from there form your two equations (including constraint)
solve for x,y to find CP (case 1, case 2, etc) and see which option optimizes (in this case, where x is smallest)
jacobian
abs val of det[ dx/u dxdv ; dy/du dydv]
divF, and the result is what type?
divF = F dot del, always a scalar
curlF, and the result is what type?
curlF = F cross del, always a vector
line equation in vector form
r(t) = (x0, y0, z0) + t(a, b, c)
line equation in parametric form
x(t) = x0+at, y(t) = y0+bt, z(t) = z0+ct
line equation in symmetric form
(x-x0)/a = (y-y0)/b = (z-z0)/c
plane equation
ax+by+cz = d
vector valued function def
function r that inputs a real # (parameter) t and outputs a vector/point in Rn
how to know if a curve is smooth
a curve is smooth if r(t) is continuous and the magnitude of r’(t) DOES NOT equal 0 for all t
how to know if a curve is PIECEWISE smooth
parametrization is piecewise smooth if the interval is composed of subintervals on each of which r is smooth
Frenet frame meaning
T(t) = unit tangent - directional steepness
N(t) = unit normal - curvature/bending
B(t) = unit binormal - lifting off from a plane
how to find level surface/curve
set vars = 0 and solve
surface = 3D, curve = 2D
minimize/maximize the distance subject to contraint g…
f(x,y) = x²+y² (distance: really this optimizes D² but the points are the same as optimizing D, so this is easier)
volume/area integrals
volume: triple integral over v of 1 dV
area: double integral over R of 1 dA
iterated integral def
integrating with respect to one variable while holding others constant
surface area formula
A = double integral over R of root(1+(magnitude of gradient f)²) dA
change of variables
double integral over R of f(x,y)dA = double integral over S of f(g(u,v))*abs value of jacobian dA
Stokes’ Theorem
single integral over C of F dot dr = double integral over sigma of (curlF dot n dS)
use whenever you see curl in the question → immediately stokes
Green’s theorem (sigma is flat)
single integral over C of (M dx+Ndy) = double integral over R of (dN/dx - dM/dy)dA
use whenever you see two things dx and dy being added
Fundamental Theorem of Line Integrals
single integral over C of (delF dot dr) = f(end)) - f(start)
where f is the potential function
divergence theorem
double integral over sigma of (F dot n dS) = triple integral over D of (divF dV) for outward n (- if opposite orientation)
line integral
single integral over gamma of (f dS) = single integral from a to b of (f(r(t))*magnitude of r’(t) dt)
when calculating line integrals order of thinking
Is there a potential function? Calculate curlF to see if = 0 and/or just determine potential function by inspection
then plug in end point and start point to potential function → end-start
Green’s Theorem
single integral over gamma of (Pdx + Qdy) = double integral over D of (dQ/dx - dP/dy)dA
if gamma is counterclockwise, you’re good
if gamma is clockwise, *-1
When to use Green’s Theorem
if the line is tracing out a closed, easy shape (circle, semicircle, triangle, square, etc)
volume of sphere :(
4/3 pi r³
stokes steps
name curl and apply stokes formula (double integral over sigma of curlf dot n dS
parametrize the line integral and solve