HSS 500 Understanding Force Prod. During Specific Tasks
1/22
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
23 Terms
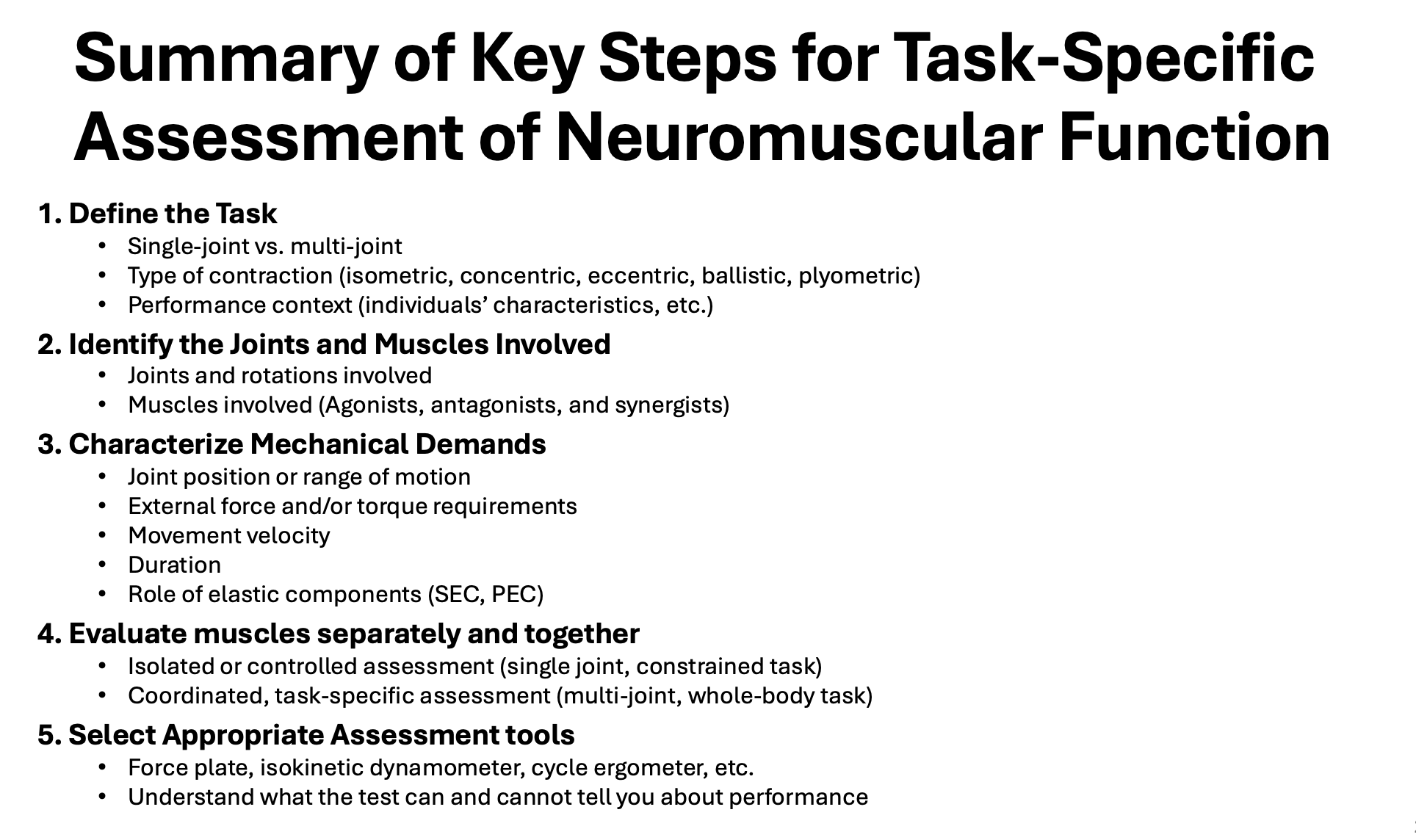
The muscle-tendon unit
Model of the muscle & surrounding tissues including three components: the contractile component (CC), series elastic component (SEC), and parallel elastic component (PEC); force generated by the CC is transmitted to the skeleton through the PEC & SEC
Contractile component (CC)
Part of the muscle-tendon unit corresponding to to sarcomeres within muscle fibers, where actin & myosin filaments slide past each other to produce force; the force-generating element of the muscle controlled by the CNS
The force produced by the CC is influenced by muscle length, contraction velocity, and neural activation (rate cording & recruitment of motor units)
Series elastic component (SEC)
Part of the muscle-tendon unit consisting of tendons and aponeuroses; stores & releases energy during contraction
Mechanical properties of SEC linked to compliance and stiffness, which determines how elastic energy is stored & released during movement → stiff SEC allows for rapid force transmission
Plyometric training is commonly used to increase tendon stiffness as a solution to optimize performance during movements involving the stretch-shortening cycle
Parallel elastic component (PEC)
Part of the muscle-tendon unit consisting of the connective tissues around muscle fibers (endomysium, perimysium, epimysium) and elastic elements of sarcomeres (e.g., titin); provides passive resistance to stretch during muscle elongation (particularly at long muscle lengths)
PEC mechanical properties influenced by collagen content & hydration
PEC resistance is greater in conditions like fibrosis or aging, requiring different rehab strategies
Step 1 — define the task you are analyzing
Select a specific task and a specific population, then analyze the task:
Single or multi-joint task
Task type (concentric, isometric, eccentric, plyometric, ballistic)
Type of contraction
Muscles involved (agonist/antagonist/synergist)
External force/torque
Position / ROM
Velocity
Duration
Step 2 — assess/develop the potential of muscle groups considered separately
Analyze the maximal force/torque that each specific muscle group can generate using isolated or controlled assessments
This step allows for a systematic and isolated assessment of the agonist, antagonist and synergist muscles contributing to the task
This step allows you to identify whether each muscle group considered separately can produce the level of force/torque needed
This step allows you to identify if there are any strong and/or weak links…
Step 3 — assess/develop the potential of muscle groups considered together
Analyze the maximal force/torque generated from a coordinated contribution of the various muscle groups
This step allows you to identify whether or not the individual is able to optimize the contribution from all muscle groups to maximize external force/torque production during a complex task
This step provides better insight when implemented using a task requiring a coordinated contribution from the muscles in conditions that are similar to the task you are studying
This step ultimately allows to assess whether or not there is any deficit in the ability of the individual to make the most out of the various muscle groups
This step captures neuromuscular control
Step 4 — identify the joint angles at which the muscles are producing force
Consider the force vs. length relationship of the muscles to identify the position or range of motion for the tasks used for neuromuscular testing
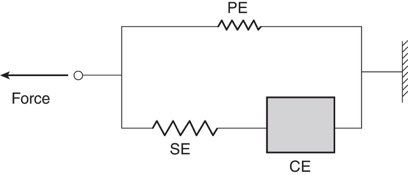
This relationship was first established by testing the effect of sarcomere length on force production
Its derivative consists of the effect of joint angle(s) on the force produced by the muscle-tendon units crossing the relevant joint(s)
Step 5 — identify the velocities at which the muscles are producing force
Consider the force vs. velocity relationship of the muscles to identify the tasks used for neuromuscular testing
This relationship was first established by testing the effect of the changes in sarcomere length on force production
Its derivative consists of the effect of joint angular velocity/velocities on the force produced by the muscle-tendon units crossing the relevant joint(s)
Step 6 — key elements to assess/train the neuromuscular function for specific tasks
Follow the steps proposed to specify the conditions of the various types of task
Each type of task calls for control of a specific set of conditions
Understanding the conditions to be controlled for each type of task will help you make better decisions when defining how to assess and/or train the neuromuscular function for a specific task
The force-length relationship at the sarcomere only
Force production varies with actin-myosin overlap:
Sarcomere at optimal length: produces maximum force
Sarcomere too short: filaments interfere and reduce cross-bridge formation
Sarcomere too long: insufficient overlap reduces cross-bridge potential
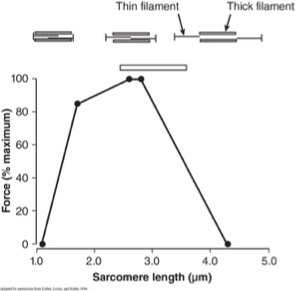
The force-length relationship with the entire muscle-tendon unit
SEC and PEC contribute additional passive and elastic force when the muscle–tendon unit is stretched beyond optimal fiber length
When the contractile component is becoming inefficient (when lengthened), there is an increased contribution from the elastic components
Strengthening the elastic components requires training in lengthened position (however, be careful training in lengthened position to prevent injury, as the tendons take longer to adapt than the muscles)
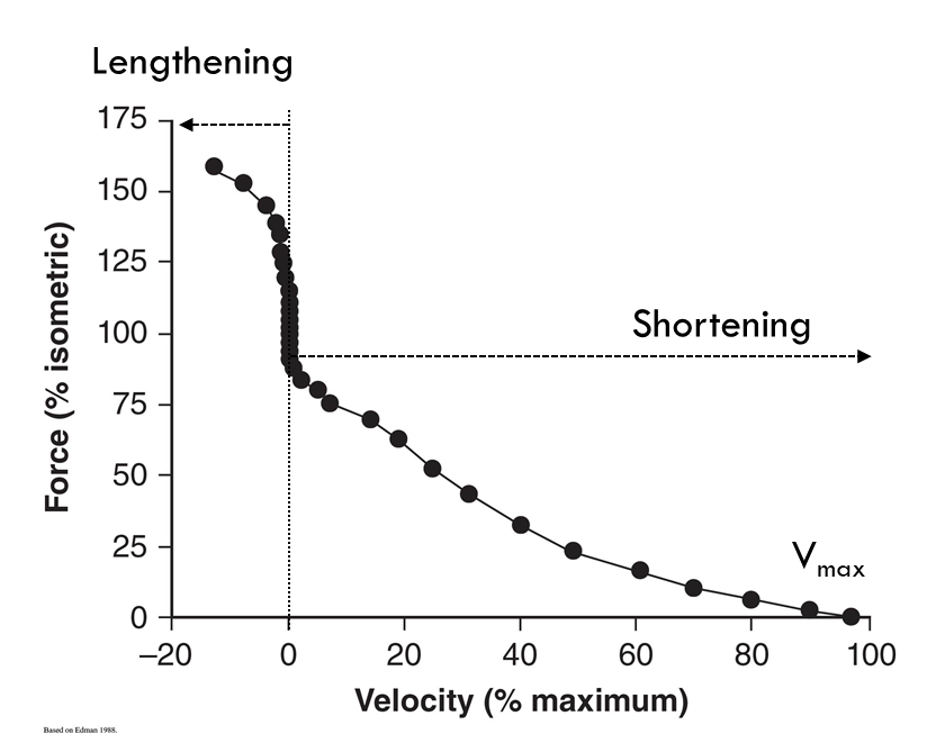
The force-velocity relationship at the contractile component
Eccentric contractions (lengthening, negative velocity) produce the highest force with the lowest metabolic cost (force produced increases with an increase in speed)
Isometric contractions (no length change, velocity = zero) allow for high force production
Concentric contractions (shortening, positive velocity) produce high to low force production, depending on shortening velocity (force produced decreases with an increase in speed)
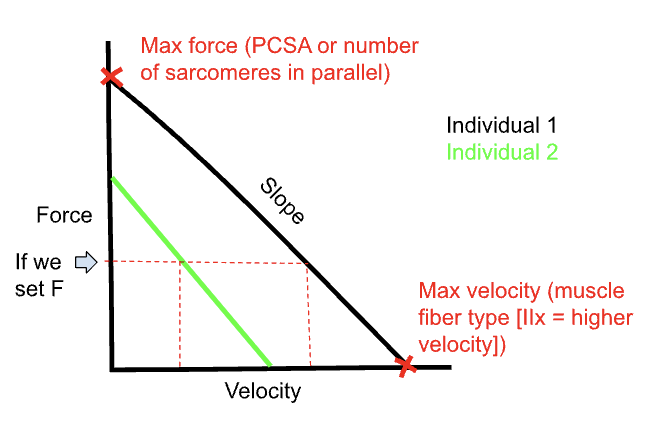
The force-velocity relationship between individuals
The shape of the Force-Velocity relationships varies across tasks and across participants and are often described as linear
Force-Velocity relationships vary across individuals in terms of:
Maximal force when velocity equals zero
Maximal velocity when force equals zero
Slope of the relationship
The power-velocity relationship — defining work and power
The power–velocity relationship provides critical insight into the muscle's ability to perform mechanical work within a given period of time (s)
Mechanical work (W) equals to the product of force and distance, mathematically expressed as: W = F x d
Power (P) is the rate of mechanical work, mathematically expressed as: P = F x d / t = F x v
Where: P is power (watts), F is force (newtons), d is distance (meters), t is time (seconds), v is velocity (meters/second)
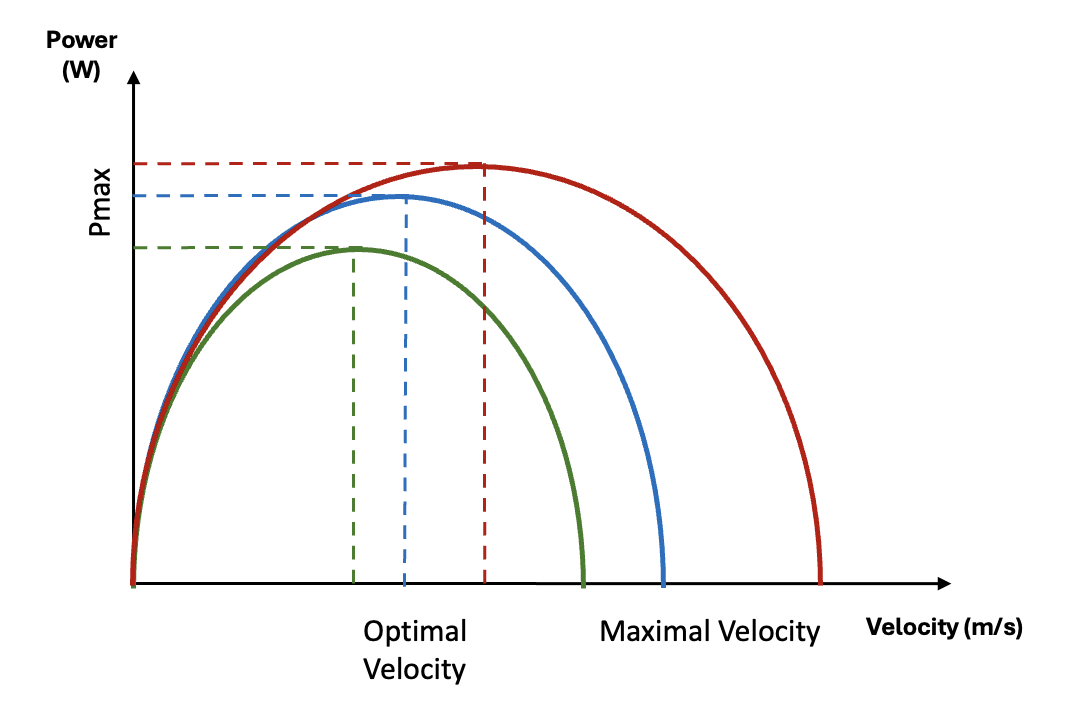
The power-velocity relationship between individuals
The shape of the Power-Velocity relationships varies across tasks and participants and are often described as parabolic
Power-Velocity relationships vary across individuals in terms of:
Maximal power – Pmax (y-coordinate of the apex)
Optimal velocity / velocity at maximal power (y-coordinate of the apex)
Maximal velocity when power equals zero
**Power = zero when there is no velocity and when you reach Vmax
How do we use the force-length, force-velocity, and power-velocity relationships?
Assessing these relationships allows for a rigorous assessment of the attributes of the neuromuscular function
Focus on force vs. length relationships to capture the potential of the individual to produce force at specific joint angles
Focus on force vs. velocity relationships to capture the potential of the individual to produce force across different movement velocities
Focus on power vs. velocity relationships to identify the single velocity at which an individual can reach their maximal power
Define the conditions of isometric tasks
Position-defined task: joint angle(s) is(are) the primary control variable
Identify tasks produced from a given combination of agonist, antagonist and synergist muscle that align with the performance you are interested
Single-joint → specify joint angle
Multi-joint → specific position and joint angles
Define the conditions of concentric tasks
Movement-defined task: range of motion and velocity/resistance matter
Identify tasks produced from a given combination of agonist, antagonist and synergist muscle that align with the performance you are interested
Single-joint → specify range of motion
Multi-joint → specify displacement and range of motion for all rotating joints
Isokinetic mode: specify the velocity (fixed across the range of motion) at which the participant will perform the movement
Isotonic mode: specify the level of resistance (fixed across the range of motion) that the participant will need to overcome
Use levels of resistance that align with those of the task of interest
Define the conditions of eccentric tasks
Movement-defined task: range of motion and velocity/resistance matter
Identify tasks produced from a given combination of agonist, antagonist and synergist muscle that align with the performance you are interested
Single-joint → specify range of motion
Multi-joint → specify displacement and range of motion for all rotating joints
Isokinetic mode: specify the velocity (fixed across the range of motion) at which the participant will perform the movement
Isotonic mode: specify the level of resistance (fixed across the range of motion) that the participant will need to overcome
Use levels of resistance that align with those of the task of interest
Define the conditions of plyometric tasks
Stretch-shortening cycle efficiency depends on coordination, stiffness, and timing
Identify tasks produced from a given combination of agonist, antagonist and synergist muscle that align with the performance you are interested (multi-joint tasks)
Look into:
Loading imposed over the eccentric phase
Force produced over the concentric phase
Overall duration (and potentially duration for each phase)
Define the conditions of ballistic tasks
Movement velocity depends on coordination, stiffness, and timing
Identify tasks produced from a given combination of agonist, antagonist and synergist muscle that align with the performance you are interested
Multi-joint → specific resistance displacement and range of motion for all rotating joints
Use:
Low levels of resistance to the movement
Aim for maximal speed
Summary of key steps for task-specific assessment of neuromuscular function