MLE FINAL
1/147
Earn XP
Description and Tags
:(
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
148 Terms
supervised learning
learning from labeled data (each example or instance in the dataset has a corresponding label)
classification vs regression
unsupervised learning - def
learning from unlabeled data (must discover patterns in the data)
clustering (K-means)
dimensionality reduction
problems/tasks:
density estimation
outlier detection
clustering
dimensionality reduction (& visualization)
association rule mining
semi-supervised learning
learning from partially labeled data
reinforcement learning
there is an agent that can interact with its environment and perform actions and get rewards
learning policy (strategy for which actions to take) to get the most rewards over time
transfer learning
learning to repurpose an existing model for a new task
density estimation
model the (unknown) probability distribution function (pdf) from which data is drawn
outlier detection
identify data points that do not belong in the training data
clustering
goal: group similar data points together in “clusters”
dataset: matrix X (n x m) — no labels
clustering algorithms:
k-means clustering
DBSCAN
hierarchical clustering
Need a holdout set — the clustering could overfir
Should train-test split or train-test-val split
dimensionality reduction (& visualization)
transform dataset into a low(er)-dimensional representation in a way that preserves useful information
association rule mining
discover interesting relationships between variables in the data
k-means clustering
greedy iterative algorithm to assign points to clusters
input: dataset X, integer k (hyperparameter — number of clusters)
k-means — objective function
c(xj) is the centroid of the cluster that xj is assigned to

k-means algorithm
Initialization: random centroid for each cluster
Do until no change in clustering:
assignment: assign each data point to the cluster with the closest centroid
update: recalculate centroids from points assigned to each cluster
k-means — determine k
guess or try different options
Heuristics: silhoutte method or elbow method
tune is as you would any other hyperparameter (if you have an objective metric to evaluate the quality of a clustering)
dataset has millions of features
training would be slow and model performance could suffer
curse of dimensionality
as dimensions increase, data becomes more sparse, making it harder to find meaningful patterns and causing distance-based algorithms to struggle.
as the number of features increases, the amount of data required to generalize accurately grows exponentially, making data points appear as isolated islands
dimensionality of data is artificial
can reduce dimension without losing information
dimensionality reduction techniques
projections (PCA)
manifold learning (LLE, Isomap)
principal component analysis (PCA)
method for linear transformation onto a new system of coordinates
the transformation is such that the principal components (coordinate vectors) capture the greatest amount of variance given the previous components
linear decomposition/transformation
PCA — algorithm
given data matrix X (n x m)
Mean-center it: subtract the mean of each feature
compute covariance matrix XTX (m x m)
eigendecomposition gives principal components
use Single Value Decomposition (SVD)
Matrix W of eigenvectors is the transformation matrix (ith column is the ith principal component)
Eigenvalue λi gives the variance of the ith principal component
PCA note
can to PCA on the correlation matrix instead of covariance matrix
PCA — inverse transformation
transform data back to the original space
X’ = Zk WkT
WkT is a k x m matrix
X’ is a (n x m) matrix
PCA — transformed data
Zk = X Wk
Wk is the transformation matrix with only the first k columns (m x k)
PCA — reduce dimensionality
to reduce dimensionality, can only keep the first k principal components
PCA - variance explained
(λ1+λ2+...+λk) / ∑i λi
Kernel PCA
for non-linear dimensionality reduction
use kernel trick (same un used for SVM)
Manifold Learning
Find mapping of dataset X into dataset Z embedded in Rp (Zi ∈ Rp) for some integer p > m
Such that (informally) Z preserves the local geometry of X
For example, if xi and xj are close (according to some distance metric), then zi and zj are also close
Want to preserve neighborhood structure
multidimensional scaling (MDS)
compute euclidean distance dij between any two points xi and xj
manifold learning — algorithms
different algorithms aim to preserve different “local” properties
multidimensional scaling (MDS)
locally linear embedding (LLE)
Isomap
t-distributed stochastic neighbor embedding (t-SNE)
locally linear embedding (LLE)
express each data point as a linear combination of its closest neighbors
multidimensional scaling
preserve distances between points
isomap
form a graph where points are connected to their closest neighbors
aims to preserve geodestic distance (i.e., shortest path distance)
t-distributed stochastic neightbor embedding (t-SNE)
tries to keep similar data points close together, dissimilar data points far part
mostly used for visualization
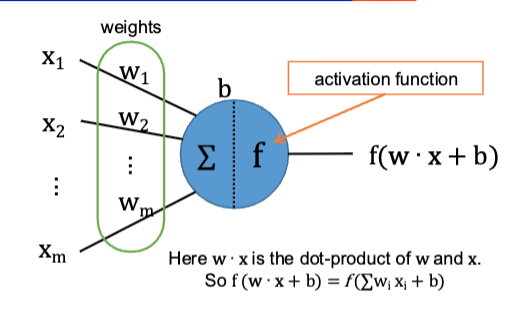
model formula
hw,b(x) = f (w . x + b)
single nueron/unit
NN — types of layers
dense (fully connected)
convolutional
recurrent
NN - activation functions
identity / linear
sigmoid
tanH
ReLU
Softmax
NN — identity activation function
f(z) = z
or none
NN — sigmoid activation function
f(z) = 1/(1 + e-z)
NN — TanH activation function
f(z) = (ez - e-z) / (ez + e-z)
NN — ReLU activation function
f(z) = max(0, z)
NN — Softmax activation function
f(zj) = exp(zj / T) / ∑i exp(zi / T )
note: in this case, the activation function is over an entire layer, not a single unit
NN — Loss
Make sure the loss function and activation function of the output layer are consistent with each other
Single Nueron — Linear Regression
one layer NN with a single neuron:
Activation function: Linear
Loss function: MSE
single neruon (binary) logistic regression
one layer NN with a single neuron
Activation function: sigmoid
Loss function: binary cross-entropy
Multi-Layer Perceptron (MLP)
input layer (passthrough)
one or more hidden layers
output layer
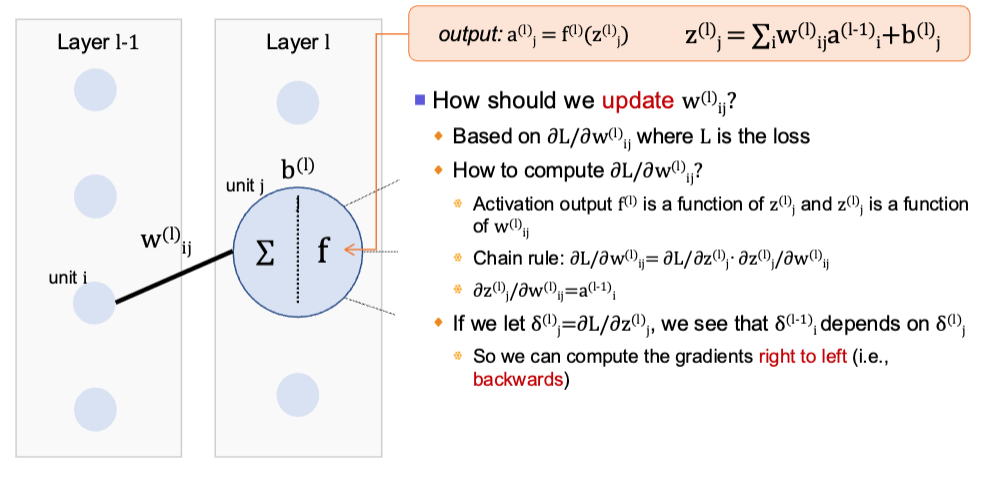
backpropagation — overview
reverse pass to measure error and propagate error gradient backwards in the network
adjust the weights (parameters) to decrese the loss
backpropagation
how to compute gradients efficiently
gradient descent
how to update the parameters to minimize the loss given the function
backprop algorithm
compute the forward pass for the mini-batch B saving the intermediate results at each layer
compute the loss on the mini-batch b (compares output of network to labels/targets —> error)
backwards pass: computes the per-weight gradients (error contribution) layer by layer
done using chain rule
Stochastic gradient descent: update the weights based on the gradients
chain rule
if z depends on y and y depends on x:
dz/dx = dz/dy · dy/dx
backprop — illustration
Use NN
complex learning task or complex data
for many problems, NN provide the best performance
image classification/captioning tasks
speech recognition
natural language modeling
dont use NN
can solve problem with simple model
don’t have a lot of data
NN require a lot of data to achieve good performance
need an explainable/interpretable model
there are some techniques to explain decisions from NN
universal approximation theorems
(feed-forward) NN can approximately represent any function
arbitrary width; bounded depth
true even if we have a single hidden layer as long as it can have arbitrarily many units
bounded width; arbitrary depth
true even if we have layers of bounded width, as long as the network can have arbitrarily many layers
NN architecture disadvantage
inconsistent activation function of output layer with the loss function
multiclass classification with cross-entropy loss, softmax activation for output layers
okay
regression with MSE as loss, tanh activation for output layer
Fail
regression with MSE as loss, linear activation for output layer
okay
funnel trick
for supervised learning, we typically have large input feature vectors and small output vectors
should make the network look like a funnel
multiclass classification with 10 classes and m = 100 input features
(input, hidden layer 1, hidden layer 2, hidden layer 3, output layer)
100, 64, 32, 16, 10
Activations:
output: softmax
elsewhere: ReLU
deep NN
anything NN with two or more hidden layers
Deep NN (DNN) challenges
endless options for netwrok architecture/topology
# of layers, units per layer, connections between units, activation functions, weight intialization method
DNN - hyperparameters related to learning
optimizer
learning rate
decay/momentum
(mini) batch size
# of epochs
DNN - Number of Hidden layers
Deep > shallow: for the same number of parameters, more hidden layers is better than wider layers
parameter efficiency
number of units in each layer - funnel approach
make the network look like a funnel
number of units in each layer - “stretch pants”
make hidden layers wider than what you need and then regularize (ex. dropout)
DNN - activation function
hidden layers — ReLU or ReLU variants
faster to compute than alternatives
GD less likely to get stuck
output layer
multiclass classification: softmax
binary classification or multilabel: sigmoid
regression: linear (no activation function)
DNN learning rate
start with low value (0.00001) then multiply by 10 each time and train for a few epocs
once training diverges — have gone too far
training diverges
the model isn’t settling toward a stable solution — it’s going in the wrong direction instead of improving
loss error start to increase instead of decreasing
DNN - optimizer
use ADAM or SGD
DNN — batch size
small batch approach: ex. 32, 64, 100
large batch approach: the largest size that fits your GPU’s RAM and use learning rate warmup
DNN — number of epochs/iterations
use early stopping
stop training before the model starts getting worse on new (unseen) data
stop at the point where validation performance is best, not where training loss is lowest
vanishing gradient
gradient vector becomes very small during backprop
difficult to update weights of lower/earlier layers — training does not converge
exploding gradient
gradient vector becomes very large during backprop
difficult to update weights of lower/earlier layers — training does not converge
training converges
with GD, the process has found (or gotten very close) to a minimum of the loss function — each additional step makes little to no difference
unstable gradients
layers of a dnn learn at very different rates
exploding/vanishing gradient mitigations
weight initialization method
non-saturating activation functions
batch normalization
gradient clipping (for exploding gradient)
skip-connections (CNNs)
glarot intialization (Xavier intialization)
Let nin: number of inputs, nout: number of outputs navg = (nin + nout)/2
Gaussian (for sigmoid activation): mean 0, variance σ2 = 1/navg
Uniform (for sigmoid activation): in [-r, r] where r = [3/navg]1/2
note: biases are initialized to 0
He intialization
Gaussian (for ReLU): mean 0, variance σ2 = 2/navg
note: biases are initialized to 0
non-saturating activation functions
ReLU + ReLU variants
dying ReLUs
a neuron can die when the weighted sums of its input are negative (for all examples in the training data)
ReLU variants
Leaky ReLU
ELU
SELU (Scaled ReLU)
these will not let neurons die because they can output negative values
Leaky ReLU
LeakyReLUa(z) = max{az, z}
e.g.: a = 0.01
ELU
ELUa(z) = z if z ≥ 0 and a (ez - 1) otherwise (z < 0)
e.g., a = 1
activation functions — rating
ELU > leaky ReLU > ReLU > Tanh > Sigmoid
use ReLU in most cases, ELU if there is extra time because network will be slower
bias
error due to incorrect assumptions in the model
inability to capture the true relationship

variance
sensitivity to small variations in the training data

strategies to lower bias
increase model complexity
use more features
strategies to lower variance
reduce model complexity
use more training data
DNN reg technique — early stopping
stop once the validation loss is at its minimum (before it starts to go back up)
DNN reg technique — L1 or L2 reg
L1: penalty term λ∑i |wi|
L2: penalty term λ∑i |wi|2
DNN reg technique — max-norm reg
the norm of weights incoming to each neuron is at most r (hyperparameter): ||w||2 < r
note: this is not added to the loss — after each training step, the weights are scaled to ensure ||w||2 < r
DNN reg technique — drop out
idea: during training, each neuron has a probability p of being dropped out (it will be ignored for this step)
hyperparameter p is called the dropout rate
after training: we do not drop any neurons anymore (but need to adjust connection weights)
generalization error
aka out-of-sample error or risk
prediction error on unseen data
related to overfitting: if the model overfits, then the generalization error will be large
bias2 + variance + irreducible error
bias-variance tradeoff
increasing model complexity — lower bias
decreasing model complexity — lower variance
double descent
unexpected and sudden change in test error as a function of model complexity (# of parameters)
Note: not all settings/models/data yield exactly two descents (e.g., sometimes there are three or more)
grokking
NN learns to generalize suddenly well after the network has overfitted
note: this occurs in very specific settings (specific tasks, small “algorithmic datasets”, complex neural networks)