SYSC3320 - UART, I2C, SPI
1/9
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
10 Terms
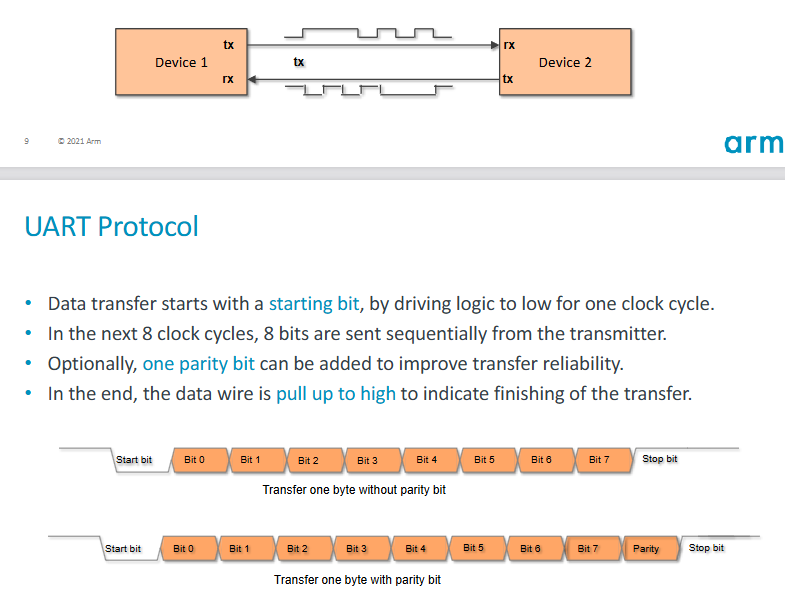
UART basics
serial communication
asynchrnous
tx and rx wires
data sent bit by bit
Start bit (low for one clock cycle) followed by 8 bits (8 bits) + parity bit
Stop bit is high for one cycle
Send text in ascii
Serial communciation vs parallel
1 bit at time
Reliable (less clock skews across differnet wires and crosstalk)
Higher clock rate
Low cost and weight
Synchronous transmissions
common clock shared by sender and receiver
efficeint transmission since only one wire for data transfer
More costly since an extra clock wire is needed
Asyhcnrnous tranmission
no clock signal sent
both must agree on a rate in advance
speacial bits sent to synchrnoize transmission
Simplex
Data transmitted only in one direction
Full duplex
Both direction tranmssion (UART and SPI)
Half duplex
Data can be transmitted in one direction at a time (I2C and CAN)
I2C overview
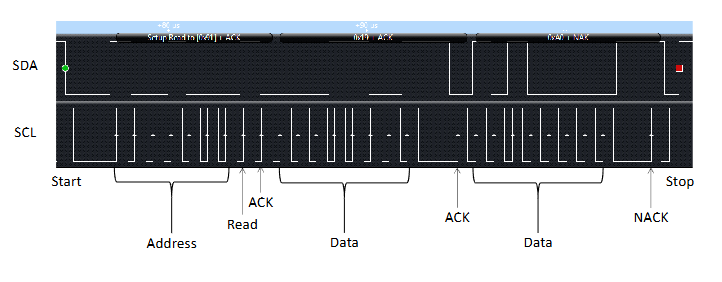
SDA and SCL lines that are normally pulled high
multiple devices share a serial bus
subordinates respond when addressed
Devices have 7 bit address
Sequence:
Generate start bit (low) then address + receive/send signal
Slave checks address. Slave responds with ack if match otherwise nothing.
Master receives or sends data depding on send/receive signal. If master is seniding the data, then the slave will ACK after each byte.
Master sends stop bit (high)
I2C code
LookupConfig
CfgInitialize(XIicPs_Config, Config, Config->BaseAddress);
XIicPs_SetClk(&IicInstance, IIC_SCLK_RATE);
// Send data
u8 SendBuffe3r[TEST_BUFFER_SIZE];
u8 RecvBuffer[TEST_BUFFER_SIZE];
u8 SimulatedSlaveEcho[TEST_BUFFER_SIZE]; // to simulate slave response
for (int i = 0; i < TESTBUFFERSIZE; i++) {
sendbuffer[i] = i + 1;
RecvBuffer[i] = 0;
SimulatedSlaveEcho[i] = SendBuffer[i]; //pretend slave received
print everyhting if you like
}
// Master send
Status = XIicPs_MasterSendPolled(&IicInstance, SendBuffer, TEST_BUFFER_SIZE, IIC_SLAVE_ADDR);
// wait until not busy
while (XIicPs_BusIsBusy(&IicInstance));
// Simulate receive
memcpy(RecvBuffer, SimulatedSlaveEcho, TEST_BUFFER_SIZE);
// print sent data
// print received data
// check that each byte matches otherwise return XST_FAILURE;SPI code
lookup config
cfgintialize
XSpi_SelfTest // self test
// Setup interrupt system
SetupInterruptSystem
// Register interrupt handler for SPI
XSpi_SetStatusHandler(SpiInstancePtr, SpiInstancePtr, (XSpi_StatusHandler)SpiIntrHandler);
XSpi_SetOptions(SpiInstancePtr, XSP_MASTER_OPTION | XSP_MANUAL_SSELECT_OPTION)
// Manually select slave
XSpi_SetSlaveSelect(SPIInstancePrt, 0x01);
XSpi_Start(SPiInstancPtr);
Setup write and read buffers
TransferInProgress = TRUE; // volatile + static var
XSpi_Transfer(SpiInstancePtr, WriteBuffer, ReadBuffer, BUFFER_SIZE);
while (TransferInProgress); // Updated by interrupt handler
// Check WriteBuffer against ReadBuffer
void SpiIntrHandler(void *CallbackRef, u32 StatusEvent, unsigned int ByteCount) {
if statusevent != XST_SPI_TRANSFER_DONE: errorcount++
TransferInProgress = FALSE;
}