Topic 1: Digital Signals and Systems
1/13
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
14 Terms
Advantages of digital signal processing
Flexibility
Programmability
Repeatability
Stability
Data compression
Cost
Flexibility detail
Data can be sampled in real-time, and if necessary, readily processed offline at some later date.
Since the data is stored digitally (no-volatile), the data can be applied to many different algorithms in order to find the most appropriate for a particular application.
Algorithm complexity is largely limited only by available memory space and processor speed, and algorithms can be readily made automatically adapt to the surrounding environment.
Some very useful algorithms are specifically derived for the discrete-time domain, and have no analogue-domain equivalent.
Programmability detail
Many digital signal processors are now available which can be readily reconfigured to perform a multitude of different signal processing tasks.
A change in software is all that is necessary to accommodate a different algorithm.
Hardware re-development costs are minimal. It also means that a minimum number of discrete components are required to implement very complex
processing algorithms
Repeatability detail
Since digital systems are configured by software or external digital hardware, the functions that they perform are very repeatable
Stability detail
Storage and processing of data by digital hardware means that problems associated with analogue processing, are not encountered.
Data compression detail
Information channels for data transmission over long distances can be very expensive. Compression can:
Lead to less information needing to be transmitted
Ensure that all the valuable information held in the original data can be reconstituted at the receiver.
Cost detail
The application of digital signal processors in becoming increasingly widespread, and hence, in many cases, the cost of digital algorithm implementation is less than analogue equivalents.
Normalised frequency
Cycles / sample or radians / sample
fn = f / fs wn = 2 * pi * fn
Properties of Digital Signals

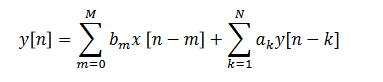
Linear Constant Coefficient Difference equations
Causal LTI systems can be described by a difference equation
Impulse response
The impulse response of an LCCD system is denoted with h
The response of the system to a unit impulse
The output of the system 𝑇 when it is fed an impulse 𝛿[𝑛] is exactly the impulse response, ℎ[𝑛]:
Impulse response properties
An LTI system is Bounded Input Bounded Output stable provided the sum of the impulse response is less than infinity
An LTI system is causal provided the impulse response is 0 for all values of n < 0
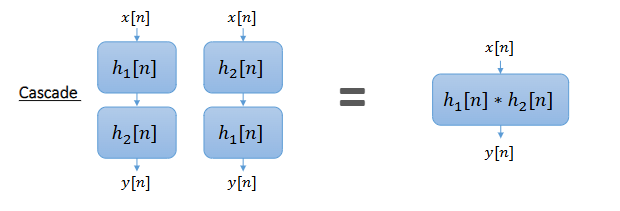
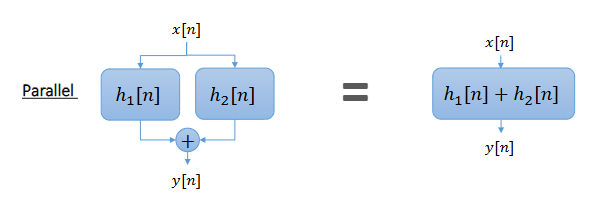
Convolution is commutative and distributive
Parallel systems
Cascade systems