2.2.1 COGNITIVE Body Schema and Multisensory Integration
1/42
Earn XP
Description and Tags
1. Explain the challenges that need to be solved by the brain when integrating information from multiple senses Reference frame, coordinate transformation, eye - /head - /body - centred reference frames 2. Define the concept of ‘body schema’ and explain disorders of body schema Body schema, body image, Alice in Wonderland syndrome, Autotopagnosia, Phantom limbs 3. List the neuroscientific and psychological evidence for multisensory integration in the brain multisensory receptive fields, cross - modal congruency and extinction, temporal- order judgements 4. Discuss why and how tools can be integrated into the body schema in light of the scientific evidence tool use, mirror experiments, peripersonal space
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
43 Terms
Moravec (1998)
it is comparatively easy to make computers exhibit adult level performance on intellgience tests or playing checkers, and difficult or impossible to give them the skills of a one-year-old when it comes to perception and mobility
Moravec’s paradox
high level cognitive reasoning → relatively easy
low level reasoning- perception, action → surprisingly hard
computers and task ability
good at “hard” tasks w higher level reasoning, e.g. chess bots, chat gpt
bad at low level tasks easy tasks e.g. movement, picking stuff up, perception
Johanasson (2005): match
investigating Moravec’s paradox
what does it take to light a match?
P lights match, normal time- quick and easy
then anesthetise the fingers → blocks all touch sensation from fingers but does not affect motor control
other senses like vision still in tact, only thing changed is tactile input
P struggles to pick up match, dropping it, makes clumsy movements, takes 25 seconds
→ shows importance of tactile input/perception
→ multisensory integration
multisensory integration
touch + vision
→ see and feel that am touching the object
two challenges in mutlisensory integration
how to transform representations from different senses into a common representational space?
how to integrate information from different senses into a coherent percept?
localisation of sensory percepts
vision → eye-centred/retinal
audition → head centred
touch → body centred
vision location
location of visual stimulus on the retina
audition location
location of sound source with respect to the ears
touch location
location of tactile stimulus on skin
reference frames
body based
need to convert….
between these reference frames and to external space (world coordinates)
reference frame snake game
player perspective: coordinates of snake in the world, e.g. upper left corner
snake perspective: sees world thru its eyes, can turn left or right
problem:
sensory input in player perspective but controls in snake perspective
coordinate transformation types
eye to head
head to body
eye to head coordinate transformation
need to know orientation of eyes
head to body coordinate transformation
need to know orienation of head
coordinate transformations
converting between reference frames
requires us to know the position and orientation of body parts
need body schema
the body schema
a representation of the positions of body parts in space, which is updated during body movement
sensorimotor representation that guides action, does not require awareness
body image
how you imagine, feel about your body
conscious, mostly visual representation
very different from the body schema
Haggard & Wolpert, 2005: features of the body schema
spatially coded
modular
updated with movement
adaptable
supramodal
coherent
interpersonal
how is body schema coded?
spatially → position of each body part in external space
how does body schema process body parts?
modular → diff body parts processed separately
how does body schema update?
updated with movement → automated and always on
how changeable is body schema?
adaptable → changes when body changes
what modality is body schema?
supramodal → combines input from multiple senses, e.g. proprioception, touch, vision, audition
how is body schema with perception?
coherent → spatial continuity when resolving perceptual conflicts
how is body schema represented?
interpersonal → observed actions represented within the same body schema
two types of bodily illusions
pinocchio illusion
rubber hand illusion
Pinocchio illusion
Kilteni et al., (2015)
blindfolded:
1) vibrating the biceps makes arm feel extended
2) if arm is extended, but we are grasping our nose → nose must be really long
Rubber Hand illusion
Kilteni et al., (2015); Botvinick & Cohen, 1998
setup:
Ps real hand hidden from view
experimental strokes real and rubber hand simultaneously
P sees and FEELs rubber hand being strokes
P starts to feel as if rubber hand is real hand
vision + touch = multisensory integration
body schema + perception: study, does body posture affect perception?
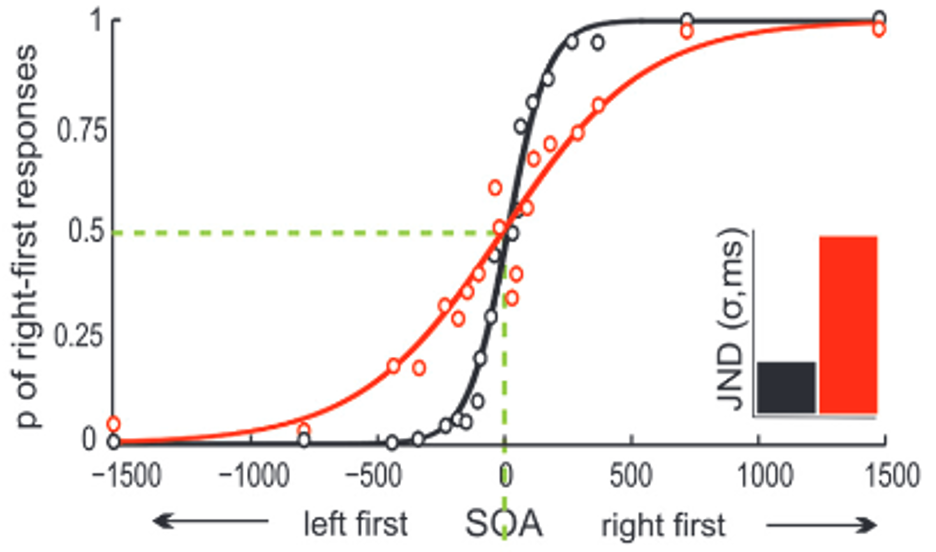
Heed & Azañón, Front Psychol, 2014
Heed & Azañón, Front Psychol, 2014: procedure
does body posture affect perception?
temporal order judgement task
setup: stimulate both hands in random order
task: indicate which hand was stimulated first
conditions: arms uncrossed/crossed
Heed & Azañón, Front Psychol, 2014: findings
Ps mix up which hand was stimulated when arms are crossed
solving the task does not need input from body schema
→ body schema affecting basic perception
how does the body schema develop?
at 6mo, the body schema starts to interefere with tactile orienting (Begum Ali et al., 2015)
→ correct tactile orienting responses same at four months regardless of if feet crossed or not
→ if uncrossed, same at 6mo as 4mo. if crossed at 6mo, significantly less correct response on tactile orientating task
Maravita et al., Curr Biol, 2003: cross modal integration and body schema
Ps recieve tactile stimulus and respond with the location (up or down)
visual distractor (up or down) is presented nearby on same hand or other hand
congruent and incongruent
congruency effect = RT for incongruent - RT for congruent
congruent rt less
a congruency effect exists for both hands → evidence for cross-modal integration and visual interference
but, effect is greater for same (congruent) hand
Maravita et al., Curr Biol, 2003: is the greater interefere based on hand location (body schema) or visual field?
arm crossing - changing the mapping of the body schema
tactile stimulus on same side of body
visual stimulus on different side of body
→ effect of visual distractor moves with the hand during arm-crossing
→ body schema (not visual representation of external space) mediates integration between vision and tactile stimulation
cross modal interactions are mediated by body schema
disorders of body schema
alice in wonderland syndrome
autotopagnosia
phantom limbs
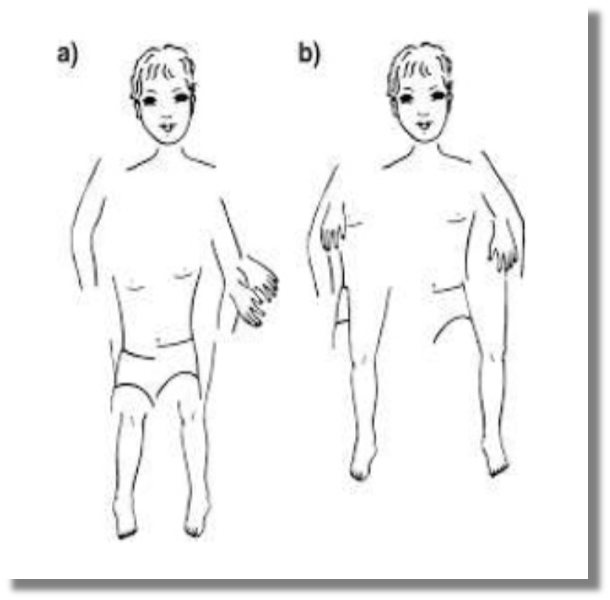
alice in wonderland syndrome
distortion in size perception
body parts might appear smaller (microsomatognosia) or larger (macrosomatognosia) than their true size
can effect whole body
associated with childhood and migraines
autotopagnosia
inability to locate body parts
loss of spatial unity of body
patients can name body parts but relative order lost
finger agnosia: fused percept of fingers
phantom limbs
after limb loss, presence of limb still felt
can include agency over limb (movement)
often associated w pain
phantom limb can change size of time, e.g. shrink, telescoping
peripersonal space
the space immediately surrounded our bodies
objects within peripersonal space can be grasped and manipulated immediately
extent not fixed- can contract and expand
Serino, 2019
neurons incorporating tools
expansion of peripersonal space during tool use reflected in neural responses
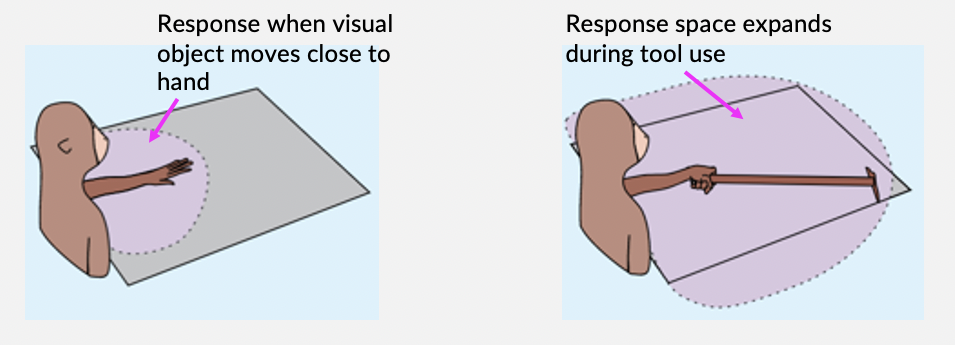
tools are incorporated into the body schema during use
Marvita et al., 2003
tool use: extending the body
tools incorp’d into body schema during use
cross modal congruency effects apply during tool use:
→ no crossing of body parts, only tools crossed
→ same delay effects as seen during arm crossing
tools become part of body schema
Marvita et al., 2003