Machine Learning All
1/94
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
95 Terms
Four Fundamental Components of Machine Learning
Assumption - what we think the world looks like or works
Model - A way of expressing the thought mathematically
Inference Paradigm - A framework for matching the model to the world
Inference Engine - A way of doing the match
Supervised Models
Give a machine learning algorithm data with associated labels
Classification
Regression
Unsupervised Models
The data is unlabelled and the algorithm attempts to learn without a teacher
Clustering - data points in the same group should have similar properties
Visualisation and dimensionality reduction - datasets with large numbers of variables
Association rule learning - discover relationships between variables in large datasets
Semi Supervised Models
Between Supervised and Unsupervised.
A small amount of labelled data is used to initially train the system and then used to classify other unlabelled data.
Needs a skilled human agent
Benefits of Semi Supervised Models
Provides considerable improvements in learning accuracy over unsupervised learning
Without the time and costs for supervised learning
Often used when you can collect lots of unlabelled data and tagging them or labelling them is costly
Reinforcement Learning
Enables an agent to learn in an interactive environment by trial and error and feedback from its own actions and experiences
Key elements:
Environment - physical world in which the agent operates
State - current situation of the agent
Reward - feedback from the environment
Policy - method to map agents state to actions
Value - future reward and agent would receive by taking an action in a particular state
Classification
Using learnt labels it is abe to classify a new data point - discrete
Regression
Developing a model that predicts the value of a data point - continuous
Online Learning
The system is fed with data instances in small groups called mini batches
Advantages:
Each learning step is fast and cheap, so the system can learn about new data on the fly as it arrives
Does not require a lot of training data
Models are adapting with time and so do not overfit to data
Disadvantages:
Prone to wrong models due to errors in data
Batch Learning
The system is trained with all available data offline. Once trained the system is launched without learning again.
Advantages:
Problems in data are dealt with before deployment
Disadvantages:
Training can take a long time and requires a lot of data
Dangers of domain overfitting
Uses a lot of computing resources
The Inference Paradigm for Regression
Optimisation - find the best set of parameters
The Inference Engine for Regression
Direct
Calculus (linear least squares)
Numerical Method
Gradient descent
Least Squares
By tuning parameters, find the values that give the lowest Residual Sum of Squares (RSS)
Residual
Represents the difference between the observed output and the predicted output
Residual Sum of Squares (RSS / SSE)
Σ(yi - y^i) 2
Mean Square Error (MSE)
Often used instead of RSS
MSE = RSS / n
Empirical Cost Function
Jemp = RSS = ( Y - Ψ θ^)T (Y - Ψ θ^)
where Y = output data, Ψ = design or regressor matrix, and θ^ = estimated weight vector
Gradient Descent Algorithm
Used for linear and nonlinear models
Gradually tweaks the model parameters to minimise the cost function, eventually converging to a set of parameters
Use the difference between the estimated result and real result to decide on the magnitude of the downward step
The greater the difference, the faster the descent
When there is no difference the algorithm will not descend anymore and will have hopefully reached the global minimum
Gradient Descent Equation
𝜃j = 𝜃j - 𝜂 𝛿/𝛿𝜃j MSE( 𝑋, ℎ𝜃)
𝛿/𝛿𝜃j MSE( 𝑋, ℎ𝜃) = 2/𝑁 Σ 𝑋𝑖′ (X𝑖 𝜃 − 𝑦𝑖)
Learning Rate 𝜂
Used to determine the size of the steps taken to reach a local minimum
Configurable hyperparameter
If it is too small, it takes longer to converge or might get trapped in a local minimum
Local minimum only happen on convex models or when the cost function is non convex
The small value does allow the model to exploit more of the surface
If it is too big, it might never converge to a solution
This bouncing enables it to explore more of the cost function surface
We need to balance exploration and exploitation
Two types of Gradient Descent Algorithms
Batch Gradient Descent
You need to use every sample point to calculate the MSE and corresponding gradients. - This takes time.
Stochastic Gradient Descent
Overcomes the problem of BGD by randomly choosing points in the data set
Instead of calculating the error of the cost function for every point in the dataset, it randomly selects some of them
Bias - Variance Trade off
When testing on “unseen data”, the MSE can always be decomposed into three components
The squared Bias of the model - how much the average of the model captures the average of the data
The Variance of the model - how much the model oscillates around its own mean to capture the datapoints
The Variance of the noise of the data
It is about trading off a more general model wth one more specific to the training data.
Linear Regression Statistics
To assess the prediction accuracy we use:
Residue Sum of Squares (RSS / SSE) = Σ(yi - y^i) 2
Residue Standard Error (RSE) = sqrt(RSS/(n-2))
Total Sum of Squares (TSS / SST) = Σ(yi - y-i) 2
R² Statistic
R² = (TSS - RSS) / TSS = ESS / TSS
(given by fitlm())
A value close to 1 indicates a good model prediction accuracy
ESS is also written as SSR
F Statistic
(given by fitlm())
If the value of F is greater than 1 and the associated p-value is less than 0.05, the response y can be well explained by the estimated combination of predictors
t Statistic
Look at t Statistic and associated P-Value for each parameter estimate
The bigger the value of |t| and smaller its associated P- Value, the more accurate the parameter estimate
A typical acceptable P-Value is < 1%-5%
The same concept as F statistic but applied to each parameter instead of the result
Collinearity
If two predictors xi and xj exist such that xi = k xj then there is no least squares solution
This is due to the matrix (ΨTΨ) being singular
Pros of Polynomials
Can find any (smooth enough) function
Linear model “closed form” solution
Well understood numerical problem
Many software packages
Explicit - Very basic, transparent and understandable
Cons of Polynomials
Matrix inversion - cubic in computer resources
For m x m matrix, doubling m, requires 8 times more memory, takes 8 times longer
Most terms irrelevant - unnecessary complexity
Leads to problems for high degree and dimensions
Num of coefficients = (p + d) Choose (d) = (p + d) ! / (p ! d !)
p = number of predictors
d = degree
Gaussian Radial Basis Functions
Radially symmetric - only the distance from the “centre” is important
Formula: 𝜙(𝑥) = exp( − (𝑥−𝑐𝑖)² / 2 𝑙𝑖2)
𝑙𝑖 = width parameter
𝑐𝑖 = centre parameter
Decay with distance from 𝑐𝑖
Local Minima
The Empirical Cost Function is RSS / MSE
For linear regression the estimated function guarantees convexity which will have a unique minimum
The estimated function does not always guarantee convexity
Numerical algorithms and Gradient Descent can experience local minima
Local minima can happen also for convex models or linear models when the cost function is non convex
Training, testing and deploying models
A model is at most as good as the data used to create it, it is usually not applicable away from that data range. Training, testing and deploying models should be done on consistent data ranges
Overfitting the training data
Occurs when the model is over trained to the extent that it can not recognise new data instances even though the data is part of the domain.
An over fitted model also learns the noise and random fluctuations in the training dataset
Implies that RSS is zero or very close to zero
More likely with nonparametric and nonlinear models
Underfitting the training data
When the model is too simple to model the domain accurately and hence can not generalize to new data
Poor performance on training data
Hold Out Validation
AKA Train_Test approach
Data is randomly split into training and test sets - typically 70:30 or 80:20
The training dataset is made up of known data which is used to train the model.
The test dataset is made up of data not seen by the machine learning methodology during training. It is used to validate the model
Need to randomise the sample by predictors
Hold Out Advantages
Computationally fast
If our data is huge and our test sample as well as train sample have the same distribution then this approach works
Hold Out Disadvantages
With limited data, some information about the data might be missed during training resulting in high bias.
Not ideal for tuning hyperparameter
K-Fold Cross Validation
First randomise the sample by predictors then:
Divide a set of n observations into K groups of equal size
Train K models using each of the (K-1) groups of data and validate the performance of each model on the single group of data left
Use the average performance of the model validations for the assessment
Leave-one-out Cross Validation
K-Fold Cross Validation taken to the extreme, where K is equal to N - the number of data points in the set
More computationally demanding than K-Folds
Key differences between Hold Out and Cross Validation
Hold-out validation wastes the held out data usually in short supply
Cross-validation provides a way of using all data for both training and testing and gives a more accurate estimate of generalisation performance.
What is Regularisation?
Applying constraints to the amplitude of estimated model parameters
A way to keep the complexity of the model under control
The objective is to reduce the variance of the model, and at the same time, help with predictor selections.
Applying constraints to the estimated model parameters can:
Reduce the sensitivity of the predicted response to variations in testing predictor data
Automatically carry out best predictor selections
Those that do not depend on how strong the coefficient-parameter association is
How does Regularisation work?
Penalise large values of parameters in optimisation
Change the cost function to include Jreg = 𝜽T 𝜽
When this is used it is known as L2 or “ridge” or “weight decay”
Jtot = Je𝑚𝑝 + 𝜌Jreg with 𝜌 ≥ 0 and Je𝑚𝑝 = (𝐘 − 𝚿𝜽)T ( 𝐘 − 𝚿𝜽)
Trade off between fit to data and smoothness
small 𝜌 = fit to data more important
large 𝜌 = smoothness more important
Uses of Artificial Neural Networks
Classification
(Multi-layer perceptron)
Pattern recognition
(Multi-layer perceptron, time-delay neural networks and recurrent nets etc)
Regression/Function Approximation
(Feedforward Architecture)
Clustering
(Self Organising Map Network)
Pattern association
Control
Filtering time series data
Because they are very flexible they tend to overfit
Different Network Methodologies
Self-organising map networks
Radial Basis Functions
Single/Multi layer perceptron
Hopfield Networks
Feedforward/backpropagation Architecture
Deep learning structures
Support Vector Machines
Time-delay neural networks
Recurrent nets
Depending on the type of methodology chosen, it can be used in supervised or unsupervised learning
Typical ML pipeline
Study the problem
Gather the data
Pre-process the data
Split the data
Training data used for step 6, Testing data used for step 7
Train model: Feature selection, hyperparameter tuning, tuning and regularisation
Cross validate the model
Deploy the model
Pre-Processing the data
Convert all data to numerical numbers
Center and scale the data
Handle missing data
Handle Outliers
Reduce dimensions (PCA
Integer Encoding
Assign each feature class to a number
Issues: arbitrarily assign numbers to labels that may impose some order/structure on the data set that doesn’t exist (distance between feature classes)
One Hot Encoding
Assign each feature class to a binary number that are all equally distant to encode words as integers without imposing any arbitrary structure.
Issues: This could vastly increase the dimension of the feature space causing increased computational burden.
Why do we normalise?
Preventing dominance of certain features
Features that take large values may dominate or bias the model during training
Interpretability
Ensuring the magnitude of model coefficients directly relates to the importance of associated features in terms of predictions.
Regularisation
Scaling features ensure that regularisation penalties are applied uniformly across all features, rather than being biased towards features with larger scales
Two main methods for normalisation
Standardisation - use mean and standard deviation
Min max normalisation
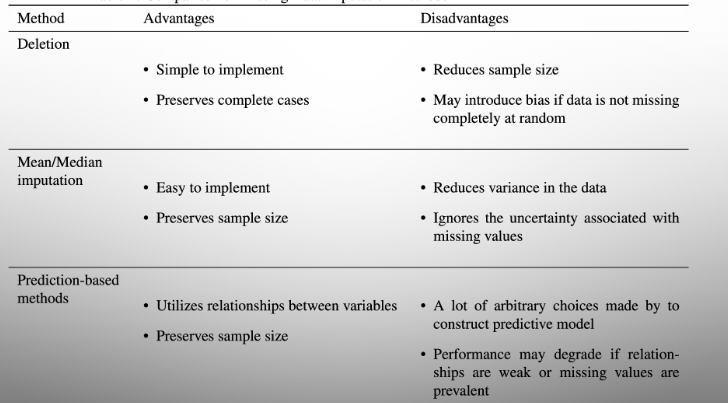
Missing Data
Real world data may have missing data because:
Sensor error (loss of power, malfunction)
Non-participant survey response
Loss of information during transmission or storage
Main methods for dealing with missing data
Delete row with missing data
Insert mean value for feature data
Prediction based (generate a linear regression model based off other features)
Comparison of missing data methods
Outlier Data
Outliers can significantly affect the performance of our model
Outliers can arise due to:
Measurement errors
Data entry errors
Malicious data poisoning
Natural variabilities
Rare events
To handle them
Treat as missing data
Scale appropriately
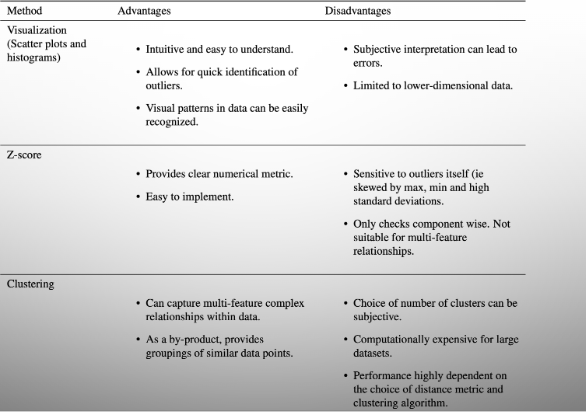
Methods for detecting outliers
Visualisation
Scatter plots - outliers appear away from main data
Histograms - outliers appear in low-frequency bins
Z-score
Detect outliers above a threshold set after normalising the data
Clusters
Extreme outliers may be single elements within a cluster or may be unable to find a well-fitting cluster
Comparison of Outlier Detection methods
Principle Component Analysis
A technique to reduce the dimension of the feature space by calculating the projection of the feature data onto a lower dimension.

Calculating PCA Projections
Compute the eigenvectors and eigenvalues of XTX (assuming centered data)
Create a matrix Vq where the columns are the eigenvectors of the largest q eigenvalues
The columns are the principal components
Compute the projection by calculating zi = VqTxi
Bayes Classifier
Try to find a function that approximately represents
𝑓l(𝑥) ≈ ℙ( 𝑦 = 𝑙 | 𝑥).
Now 𝑓l(𝑥) ∈ [0,1] provides an estimate on the probability that the data sample 𝑥 is labelled 𝑦 = 𝑙
Logistic Regression
A popular choice for the probability function is the logistic function (sigmoid)
f(x) = 1/(1 + e^-x)
Likelihood Function
Aim to maximise the probability of observing the training data assuming our ML model is correct
Optimal parameters are such that l(a0, a1) ≈ 1 and suboptimal parameters are such that l(a0, a1) ≈ 0

Advantages of K-Nearest Neighbours
Does not assume that our model, 𝑓(𝑥), takes a certain parametric structure.
Since there are no parameters, no need to optimize.
Can represent complex boundary conditions.
Disadvantages of K-Nearest Neighbours
Arbitrarily chooses a metric for closeness (the Euclidean norm).
Depending on the units and scale of the data this may not be the best metric.
Arbitrarily chooses 𝑘 ∈ ℕ, the size of the neighborhood.
Only considers what is occurring locally around data point where global properties may be important.
A lot of online computation is required to make each prediction (we are required to compute 𝑁k(𝑥0)).
Confusion Matrix
TPR = number of correctly predicted positive labels / number of truly positive data
FNR = number of incorrectly predicted negative labels / number of truly positive data
FPR = number of incorrectly predicted positive labels / number of truly negative data
TNR = number of correctly predicted negative labels / number of truly negative data

Sensitivity and Specificity
Unlike regression models, classification problems are interested in measuring class-specific performance
Sensitivity = TPR = percentage of positive cases correctly identified
Specificity = TNR = percentage of negative cases correctly identified
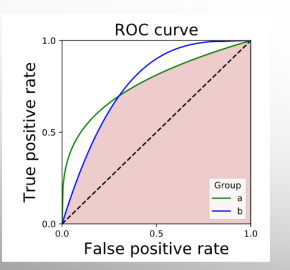
ROC Curves
The performance of a classification model is done by plotting a Receiver Operating Characteristic (ROC) curve
Given a classification model for different threshold values, we plot the TPR vs FPR to get the ROC curve
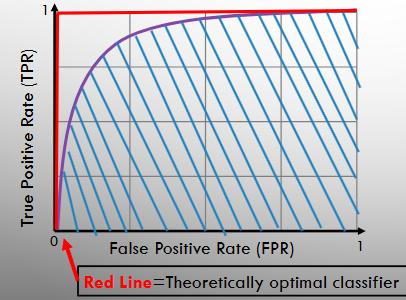
We would like to find a classifier that has TPR = 1 and FPR = 0
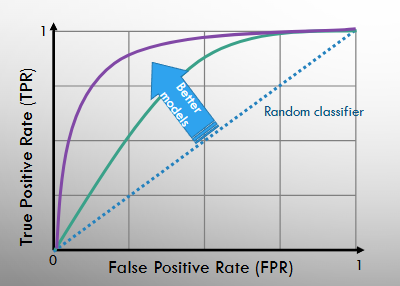
AUC (Area Under the ROC Curve)
Provides a metric for the performance of a classifier over all thresholds
Theoretically the best classifier has an AUC of one
What is the main problem with collecting data
Obtaining data from a wider population is often infeasible because:
It takes a lot of effort to collect all the data and therefore this is expensive
It might be a rare event and therefore a lack of possible obtainable measurements
There might be a lack of quality data
Why do we split data sets
Predicting with one data set will have no metric to assess the quality of this prediction.
If the estimates from the split data are close, we can trust our estimation.
If we only have one measurement, then we have no way of assessing how confident we should be about this estimation.
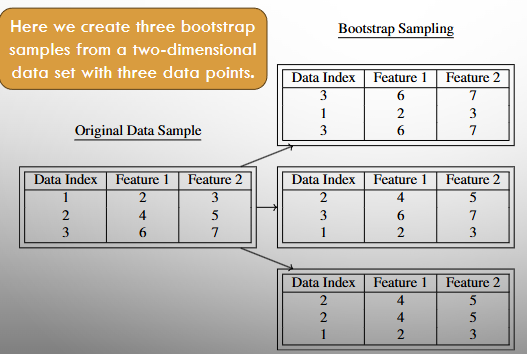
Bootstrapping
Artificially create new data sets from a single data set by sampling with replacement.
Sampling with replacement may cause bootstrapped samples to contain duplicate data.
Sometimes need to do data processing to handle this (delete / PCA)
If we are estimating the mean then data processing is unnecessary
Rather than a single estimation based on the entire data set, we have a range of estimations and can say how confident we are.
How to combine Bootstrapped Models
Known as Bootstrap, Aggregation, or Bagging
Suppose we have a data set, and have created N bootstrapped data sets in which we have trained N models:
Regression - Take the average of the bootstrapped models
Classification - Take the majority vote of the bootstrapped models
Bagging helps to reduce the chances of overfitting by reducing model prediction variability
Used for high-variability models where it is not easy to regularise
Decision Tree Terminology
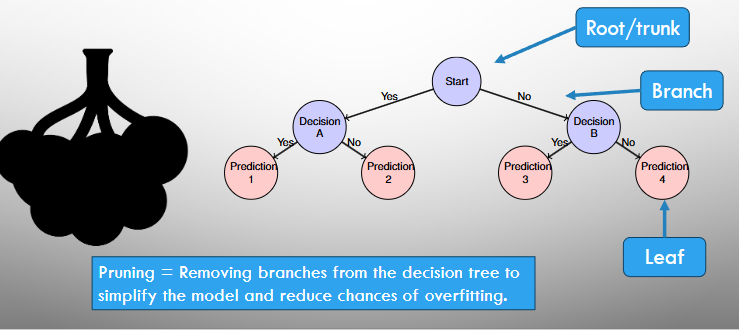
Decision Tree Visualisation
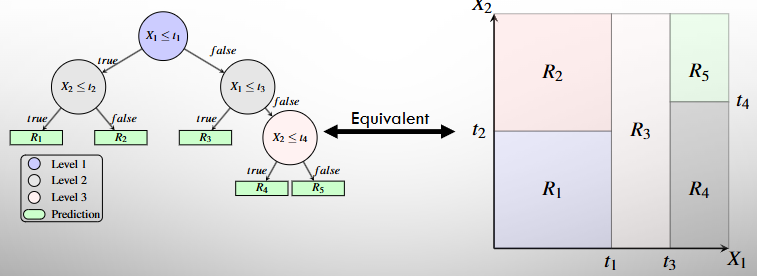
How do Decision Trees make Predictions
Suppose you have answered a sequence of binary questions for input data x and have arrived at a leaf in region R
Regression - the average values of the labels in region R
Classification - the most common label of feature training data in region R
Splitting the Decision Tree
Grow trees sequentially downwards
Grow trees greedily, so we select the leaf to split that most improves our model
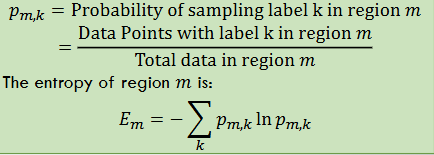
Regression - calculate the training MSE resulting for each split and choose the best
Classification - calculate the training Entropy resulting for each split and choose the best
Entropy
The smaller the entropy, the better
Variations of Decision Trees
It is easy to overfit a decision tree (one leaf for each training data point) so we use:
Bag of Trees
Bootstrap the training data to make multiple decision trees
Average the output to make a prediction
Random Forest
Create a bag of trees - but each tree we make our split based on only a random subset of feature variables
By randomly sampling a subset of the features we give non dominant features a chance to be at the root of the tree, increasing the diversity within our bag. Therefore, our model will be less sensitive to noise within a particular feature.
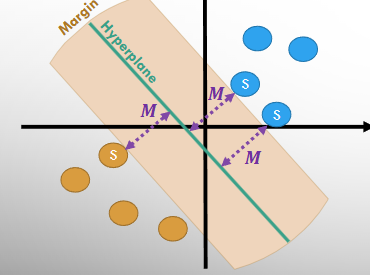
SVM Definition
Support Vector Machine finds the hyperplane that separates binary labelled data points by maximising the margin (the minimum distance between the hyperplane and any data point)
Support vectors lie on the boundary of the margin. Therefore, changing the position of non-support vectors does not affect the optimal hyperplane.
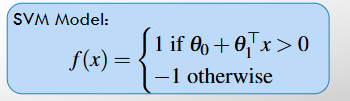
SVM Model
Can be expanded to nonlinear decision boundaries by using basis functions
We can solve the optimal separating hyperplane in a higher dimension and project our decision boundary back into the original dimension for nonlinear basis.
It is much easier to find the hyperplane that separates the points in the higher dimension
K-Means Clustering
A heuristic approach to clustering
Randomly assign a number from {1,…,K} to each data point
Iterate until cluster assignments stop changing:
For each of the K clusters, compute the cluster centroid
Update the cluster assignment of each data point to the cluster with the closest centroid.
May converge to a local minima rather than optimal clustering, but is more tractable to execute than brute force (KN iterations)
Advantages of K-Means
More computationally efficient than finding the optimal clusters by brute force.
Disadvantages of K-Means
The user must select the number of clusters, 𝐾. This is an arbitrary choice and only heuristic methods like the elbow method can be used to assist
Does not necessarily converge to the optimal 𝐾 clusters. The local min that is outputted strongly depends on the initialization of cluster data assignment.
Clusters all have a certain “spherical" shape, being defined by points closest to a centroid. May struggle to model clusters with more complicated shapes
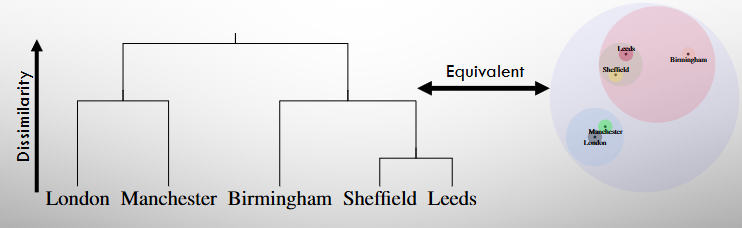
Hierarchical Clustering (Dendrograms)
Offers a different way of grouping data without needing to decide on the number of clusters beforehand.
Gives us a highly interpretable visual called a dendrogram, which shows how data points are connected in a tree-like structure.
Hierarchical Clustering Algorithm
Greedy algorithm
Begin with N data points and measure the euclidean distance of all the pairwise dissimilarities
Iterate through i = N to 1
Examine all pairwise inter-cluster dissimilarities among the i clusters and identify the pair of clusters that are least dissimilar
Fuse these two clusters, the dissimilarity indicates the height in the dendrogram the fusion should be placed
Compute the new pairwise inter-cluster dissimilarities among the remaining i-1 clusters.
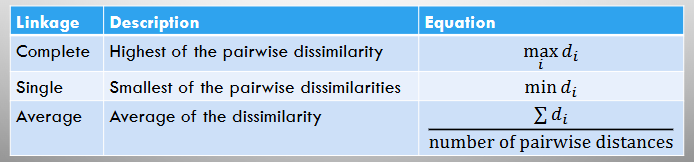
Cluster Linkage
The term used to call the dissimilarity between clusters.
To compute linkage, must compute all pairwise dissimilarities.
Elbow Method
For some data x of length N with naturally occuring clusters C1 ,…,CK
When K < K* some of the clusters will contain elements from more than one of the naturally occurring clusters and there will be high internal dissimilarity within some clusters.
When K > K* some of the clusters will partition one of the naturally occuring clusters and hence increasing K further will only decrease total dissimilarity by a small amount.
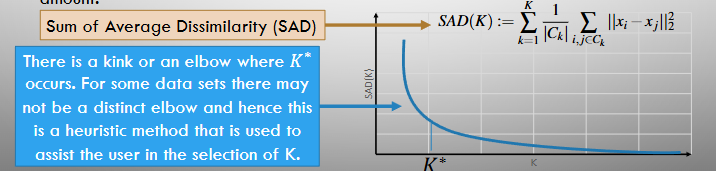
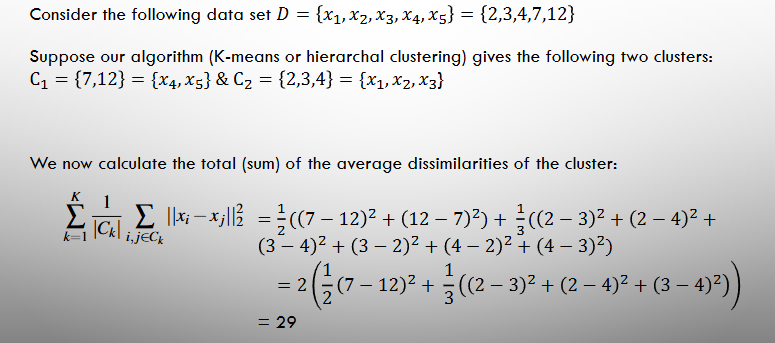
Calculating Average Dissimilarity
Ethics in ML
About value-driven decision-making, encompassing whether and how ML systems should be used, including (but not limited to) bias considerations.
Example: Deciding whether to deploy a facial recognition system at all in a public space due to concerns about privacy and mass surveillance, regardless of how biased it is.
Bias in ML
A technical property of models that can often be measured and mitigated.
Refers to systematic errors leading to consistent distortions in the output of a machine learning model, often resulting from inherent limitations in the data used for training or from the algorithm itself.
Biases can lead to unfair or discriminatory outcomes, as the model may exhibit preferences or inaccuracies that disproportionately impact certain groups or individuals
Example: A facial recognition system that performs worse on certain groups of people due to under-representation in the training data.
Types of Bias in ML
Data Collection
Sampling Bias - We sample data from the wider population in a non-uniform way
Exclusion Bias - During data cleaning, we may wish to exclude certain features and omit some data (outliers, missing data, etc)
Model Training
Technical Bias - We decide what method, type of regularization, hyperparameters, etc that all impact model output prediction.
Model Deployment
Contextual Bias
We may misuse the model by deploying it in a way not intended during training.
We may selectively censor the model's output.
We may deploy the model in a way that does not benefit all of society equally.
Real World
Real world (historical) bias - High-quality data does not exist for all groups and events equally
Techniques to Prevent Bias
To ensure your model is ethical you should create an outer feedback loop to ensure that the model is compliant with stakeholder ethical concerns.
You may make modifications to any of the stages in your ML pipeline to ensure the model is ethical.
This includes checking how the model is being used and what impact is having on certain groups.
Tuning Thresholds for Fairer Models
Given a trained Bayesian binary classification model, suppose there are two groups within the training data set.
Plot the ROC curve for both groups separately.
Pick the model threshold where the model gives the same TPR and FPR for both groups.
The challenge of understanding AI decisions
Issue: ML systems often lack explanations for their decisions
Challenge: Understanding the logic becomes harder as we develop more powerful algorithms
Consequence: Black box models can cause harm due to their opaque nature
Interpretability
In safety-critical domains, such as driverless cars, ensuring human life's safety is paramount. To achieve this, it's imperative to comprehend how machine learning (ML) models arrive at their predictions. By doing so, we empower ourselves to rectify potential failure modes and make ethical decisions proactively, rather than relying solely on algorithmic outputs.
Neural Networks (NN) exhibit remarkable capability in expressing a wide array of functions. However, deep NNs comprising thousands of neurons intricately anipulate and combine feature variables in ways beyond human comprehension
Simpler models like decision trees provide interpretable frameworks. By tracing the path of a decision tree, we can easily deduce the logic underpinning each decision, offering valuable insights into the model's decision-making process.