motor control in mammals (1&2)
1/46
There's no tags or description
Looks like no tags are added yet.
Name | Mastery | Learn | Test | Matching | Spaced | Call with Kai |
|---|
No analytics yet
Send a link to your students to track their progress
47 Terms
what are the three distinct categories of movement?
-reflexive- stereotyped responses to specific stimuli
-rythmic- timing and spatial organisation is controlled largely autonomously by spinal cord or brains tem (initiation/ termination are voluntary)
-voluntary- conscious control of movements by the brain (intiated to accomplish specific goal- e.g. play piano)
what level is strategy & how is it controlled in the brain?
-the goal of the movement
-high level
-association of neocortex, basal ganglia & cerebellum
what level is tactics & how is it controlled in the brain?
muscle contractions required to achieve the strategic goal
motor cortex, cerebellum
middle
what level is execution & how is it controlled in the brain?
activation of motor neuron and interneuron pools that generate the movement
brain stem, spinal cord
low
what does the neocortex do -in motor control
provides info about body positioning in egocentric space: vision, audition, somatic sensation (sensation from the skin), proprioception (perception or awareness of body position)
what does the basal ganglia do in strats -motor control
alternatives (e.g. if doing tennis serve- serve wide/ narrow etc) filtered through basal ganglia & back to cortex
what are ballistic movements
cant be altered once intiated (no sensory feedback except before and during movement )
what sensory info is involved in strategy of movement
‘mental image of the body’ in egocentric space
what sensory info is involved in tactics of movement
memory and sensory information from past movements
what sensory info is involved in execution of movement
maintenance of posture and muscle length and tension before and after voluntary movements
define sensorimotor transformation & motor outputs
motor outputs= neural commands that act on muscles causing them to generate movement
sensorimotor transformation= sensory stimuli being converted into motor commands
what does sensorimotor transformation depend on
extrinsic info about the world around us (e.g. spatial location of a target)
intrinsic info about our body (e.g. kinematic and kinetic info)
whats the difference between kinematic and kinetic info
kinematic- position, velocity and acceleration of the hand, joint angle, lengths of muscles
kinetic- the forces generated or experienced by the body
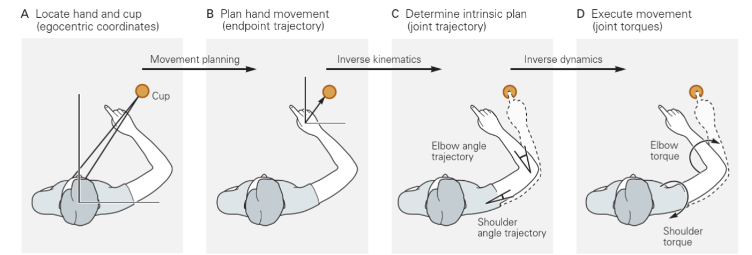
SAQ: Giving ONE relevant example, outline how extrinsic information is used in a sensorimotor transformation which enables a rugby player to pass the ball [2 marks].
-Target is localised in egocentric space (relative to the head).
-Plan of movement (path and trajectory) and initial location of endpoint and endpoint trajectory.
-Inverse kinematic transformation. The joint trajectories to achieve the hand path are determined.
-Inverse dynamic transformation. Joint torques or muscle activities to achieve joint trajectory are determined
whats the path for planning and controlling movements
sensory perception -> sensory motor transformation -> neuronal circuit (motor/ interneurons) -> muscle contraction -> motor output (e.g. escape/ forage) then learn from the efficiency of the output behaviour (instructs future behaviour)
what are some features of the primary motor cortex
-organized somatotopically- spatial arrangement of motor responses in which adjacent muscles are controlled by adjacent regions
-somatotopic mapping mirrors that of the somatosensory cortex
how do internal models work (e.g. elbows and hands)
-Fixed lengths of limbs means that there is a mathematical relationship between joint angles of the arm and the location of the hand in space.
-A neural representation of the mathematical relationship allows the CNS to estimate hand position if the joint angles and segment lengths are known.
-Neural circuits compute sensorimotor transformations = internal models
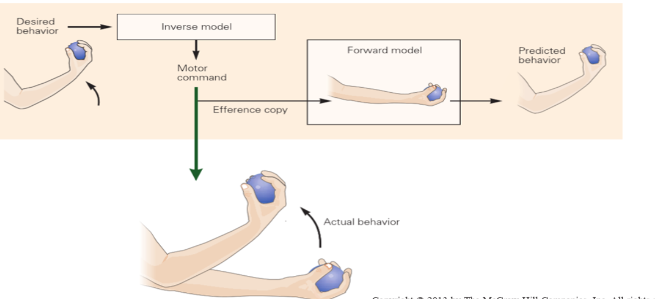
whats the difference between the internal models?
forward model- output is predicted behaviour, represents the relationships between actions and their consequence - anticipates how motor system will change as a result of the motor command (copy (efference copy) of motor command passed to forward model that acts as neural stimulator)
inverse model- output is desired behaviour- calculates motor outputs from sensory outputs- determines the motor commands that are needed to produce the movements necessary to achieve the desired consequence
aim however is the output of the forward is the same as the input of the inverse model (if structure and parameter values of each are correct)
SAQ: Giving ONE relevant example state how the two forms of an internal model could produce different results when lifting a tin of paint.[4 marks].
-predicted model is not same as inverse model and so failed at aimed motor activity (e.g. overshoot)
-predicted (forward) model is the same as the inverse model and the activity is successful
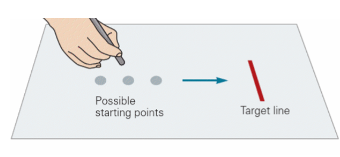
describe the speed-accuracy trade off
limited ability to move rapidly and accurately at the same time
e.g. a task in hiting a target from 3 positions and each subject required to complete the movement in different times (140, 170, or 200ms)
as time given goes down, accuracy goes down and variability in movement increases
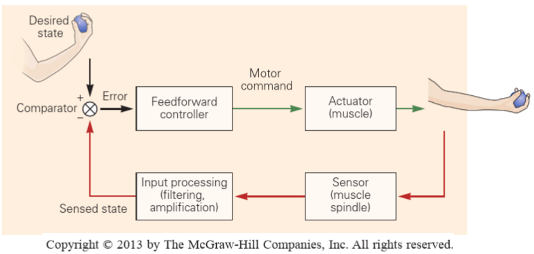
whats feedforward vs feedback control
feedforward -generates motor command based on the desired state, movement not monitored for errors (sensory info to detect imminent perturbations and initiate pro-active strategies based on prior experience)
feedback- error correcting system, desired & sensed stated compared (at comparator) = error signal generated- this signal helps shape motor command
why are motor system adaptations a thing? why not know inherently?
some motor behaviours are hard wired- e.g. foals standing immediate
learning new motor skills- via environmental interactions, must adapt to new and varying environments
sensorimotor control systems must constantly adapt over a lifetime
time taken to learn motor skill reflects its difficulty
whats the difference between implicit learning and explicit learning
implicit (procedural) - e.g. learn to ride a bike
explicit (declarative)- e.g. memorising directions to a destination
what can cause total loss of proprioception (the man staring at his feet as he walks)
-can sense pain & temperature but loss of sense of joint position, vibration & fine tactile sensations
-sensory neuropathy -selectively damage large diameter sensory fibres in peripheral nerves & dorsal roots
A patient presents to their doctor and after various tests and referrals to specialists their behavioural presentation leads to a diagnosis that they have lost proprioception.
State which specific behavioural motor presentations may lead to a diagnosis of loss of proprioception. [3 marks]
-needing to look at limbs as moving them
-needing to watch their feet as they walk
-still being able to detect temperature & pain in legs and arms etc
-ccurved and inaccurate movements
define locomotion and how its controlled
locomotion- using rhythmic & alternating movements of the body or appendages
control- automatically by low levels of CNS w/o intervention by higher centres (however adaption is required in unfamiliar environments)
what 2 qs important to ask about locomotion
How do assemblies of nerve cells generate the rhythmic motor patterns associated with locomotor movements?
How does sensory information adjust locomotion in the environment?
what did 2 major experiments by Brown et al find about locomotion
-rhythmic patterns of motor activity elicited in spinal animals by application of adrenergic drugs
-walking evoked in decerebrate cats by electrical stimulation of a small region of brain stem
conclude- motor output for locomotion is produced primarily by the neuronal system in the spinal cord
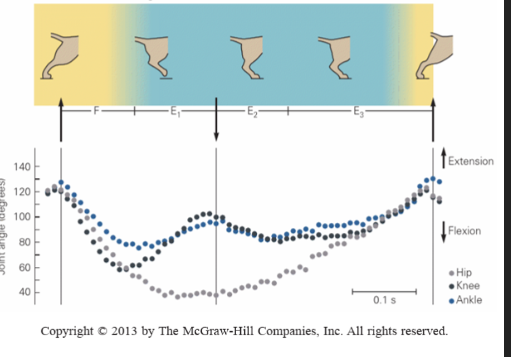
in cats, what are the 4 phases of the step cycle
-Flexion (F)
-First extension (E1)
-Second extension (E2)
-third extension (E3)
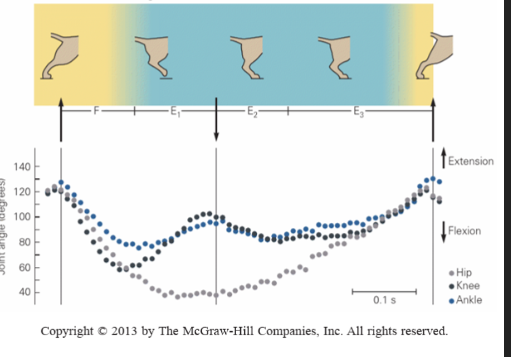
describe how cat set phases interact to create walking
F and E1 occur in swing phase when foot is off the ground, E2 and E3 occur during stance when the foot makes contact with the ground
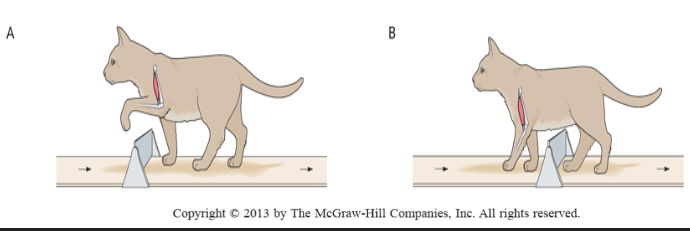
whats the stumbling corrective reaction
sensory receptors in skin influence walking by detecting obstacles -> adjust stepping to avoid
excitation of flexor motor neurons & inhibit extensor motor neurons
rapid flexion of paw away from stimulus & elevation of leg to step over object
Corrective flexion only produced if paw is stim during swing phase (if in stance phase animal may fall over cuz its being supported by the limb)
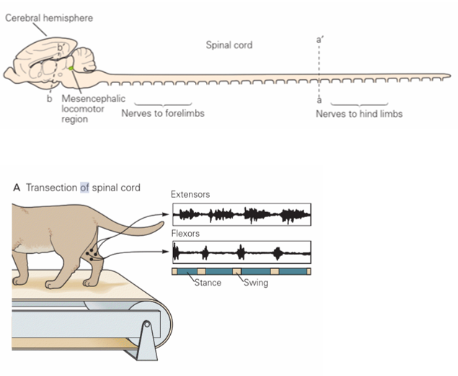
whats a typical spinal preparation
surgical severing of the spinal cord - typically at lower thoracic level
isolates spinal segments controlling hind limb musculature from rest CNS
describe acute spinal preparations
adrenic drugs e.g. L-DOPA administered immediately after transection
=elevation of NA in the spinal cord
spontaneous generation of locomotor activity 30 min after administration
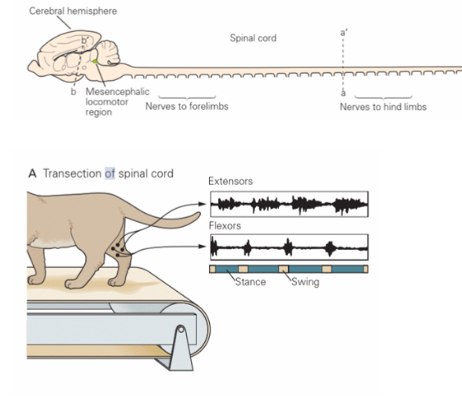
describe chronic spinal preparations
transaction of spinal cord studied for weeks or months
locomotor activity can return within a few weeks of cord transection & returns spontaneously in kittens
daily training required to restore in adult cats
what are decerebrate preparations
brain stem is completely transected at level of midbrain
disconnects rostral brain centres (especially cerebral cortex) from spinal centres (where locomotion pattern generated)
for investigation of cerebellum & brain stem in control of locomotion
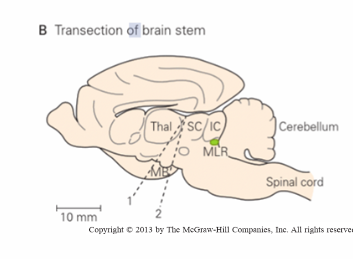
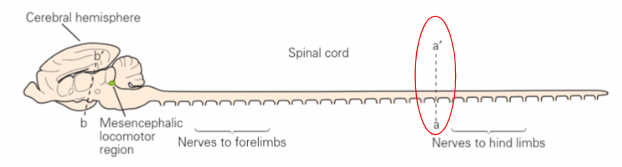
what are the two ways to transect decerebrate preparations
pre mammillary preparations-transect from rostral margin of superior colliculi to point immediate rostral to mammillary bodies (brain stem centres remain connected to spinal cord)(circled on diagram)
post-mammillary preparation- transaction caudal to mammillary bodies
whats the difference in effect between the 2 decerebrate preparations
pre-mammillary= spontaneous stepping
post-mammillary= no spontaneous stepping, electrical stim of mesencephalic locomotor region needed to evoke walking
what are 4 conclusions can you take from Brown’s work?
Supraspinal commands (occurring above the spine) are not necessary for producing the basic motor pattern for stepping.
The rhythmicity of stepping is produced by neural circuits contained entirely within the spinal cord.
The spinal circuits can be modulated by tonic descending signals from the brain.
The spinal pattern – generating networks do not require sensory input but are strongly regulated by input from limb proprioceptors.
State the difference between chronic and acute spinal preparations in the neural control of stepping AND give the behavioural consequence of each preparation in adult cats [4 marks].
chronic- studied for weeks to months, causes lack of ability to walk but can will return spontaneously in kittens (more permanent effects), need physical therapy if adult cat
acute- studied for hours, stimulated with adrenal drugs- spontaneous locomotion after 30min, less long term/ permanent effect on the cat
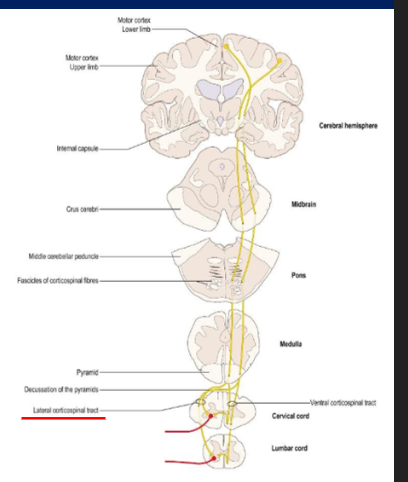
what do descending spinal tracts do then? (communication of cerebral cortex w brain stem & motor neurons of spinal cord)
-control of movement
-muscle tone (posture)
-spinal reflexes
-spinal autonomic functions
-modulation of sensory info to higher centres
what are 3 descending spinal tracts
corticospinal pathways- control of voluntary, discrete & skilled movement
medial pathways
lateral pathways
whats hereditary spastic paraparesis
progressive weakness of the legs & muscle spasms, increased muscle tone & marked stiffness in gait, caused by degeneration of lateral corticospinal tract
how is spastic paraparesis inherited
autosomal dominant
whats the difference between acute, chronic, and focal lesions of the spinal cord?
acute- occlusion of anterior spinal artery, trauma
chronic- compression of spinal cord & emerging nerve roots, infection & tumours of spine, meninges & nerve roots, prolapsed invertebral discs
focal- lesions of spinal cord and root nerves, destroys function at the segmental lvl, disrupts descending motor tracts
what can injury to the spinal cord result in
Loss of sensation
Loss of movements
Loss of autonomic function
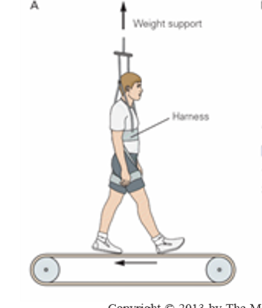
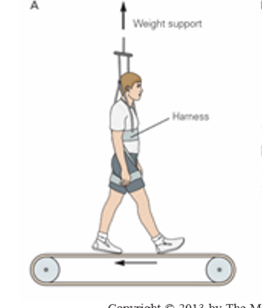
why is repetitive weight supported stepping on a treadmill used as treatment of spinal cord injury
-based on Browns observation spinal cats can be trained to step with their hind leg on a moving treadmill
-partial support of body weight reduces requirements for supraspinal control of posture & balance
how is repetitive weight supported stepping on a treadmill therapy thought to work
depends on synaptic plasticity in local spinal circuits & successful transmission of at least some motor commands through preserved descending pathways (possible compensatory mechanisms)