Center of Mass Calculations to Know for AP Physics 1
Definition of Center of Mass
Center of Mass (COM): The average position of all the mass in a system, weighted by mass.
The COM represents the balance point of the system where mass is evenly distributed.
For systems with uniform density, the COM often coincides with the geometric center.
Behavior: The COM behaves as if all external forces and torques act on this single point. This simplifies the analysis of motion and stability.
Key Formulas for Calculating COM
For Discrete Objects:
If a system consists of discrete particles, the position of the COM is calculated using the weighted average of their positions:: Total mass of the system .
: Mass of each particle.
: Position vector of each particle.
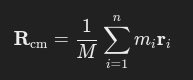
M: Total mass of the system.
mi: Mass of individual particles.
ri: Position vector of each particle.
Explanation: Heavier particles pull the COM closer to their positions. For example, if two particles of unequal mass are connected by a rod, the COM lies closer to the heavier particle.
For Continuous Objects:
When the object has a continuous mass distribution, the formula becomes:: An infinitesimal mass element.
Integration is performed over the entire volume, area, or length of the object, depending on its geometry.
dm: Infinitesimal mass element.
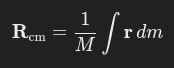
Explanation: This formula is often used for irregular shapes or objects with non-uniform density. For regular shapes like rods or discs with uniform density, symmetry simplifies the calculation.
Special Cases of COM
Symmetrical Objects:
The COM is at the geometric center for objects like spheres, cubes, and cylinders if the density is uniform.
Example: The COM of a uniform sphere lies at its center.
Composite Objects:
For objects made of multiple parts, each part is treated as a separate mass, and the discrete COM formula is applied.
Steps:Find the COM of each part.
Treat each part as a point mass located at its own COM.
Use the discrete formula to calculate the total COM.
Example: A T-shaped object can be divided into two rectangular parts. Calculate the COM of each part and combine them to find the overall COM.
Two Dimensions (2D):
The COM coordinates are calculated separately for the x- and y-axes:

Three Dimensions (3D):
The COM extends into three dimensions:

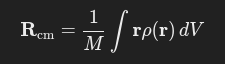
Non-Uniform Density:
When density varies, the COM formula incorporates the density function :
Integration is performed over the object's volume .
Center of Mass and Motion
Conservation of Momentum:
The motion of the COM is determined by external forces.
If no external forces act, the COM moves at constant velocity (Newton's First Law).
Rotational Motion:
The COM affects torque and angular momentum.
For an object in rotational equilibrium, the net torque about the COM is zero.
COM Frame of Reference:
Analyzing problems in the COM frame simplifies calculations, especially in collisions.
Applications in Physics
Collisions:
The COM is crucial in analyzing elastic and inelastic collisions.
Conservation of momentum simplifies calculations.
Stability Analysis:
The position of the COM determines the stability of objects.
A lower COM increases stability, while a higher COM makes objects prone to tipping.
Rotational Dynamics:
Helps understand how mass distribution affects rotational behavior.
Sample Problems and Solutions
Problem 1: Discrete System of Particles
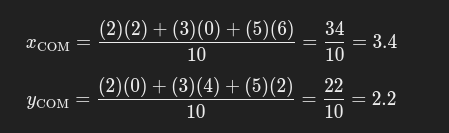
Question: Three particles of masses 2 kg, 3 kg, and 5 kg are placed at positions (2, 0), (0, 4), and (6, 2), respectively. Find the COM of the system.
Solution:
Calculate the total mass:
Use the COM formulas for x and y coordinates:
Result: The COM is located at (3.4,2.2).
Problem 2: Continuous Rod
Question: A uniform rod of length and mass lies along the x-axis with one end at the origin. Find the COM of the rod.
Solution:
Define the mass element:
Calculate the COM using integration:
Result: The COM lies at the midpoint of the rod: xCOM= 5m.