Plane Kinetics of Rigid Bodies
Kinetics of Rigid Bodies: Deals with the relationships between external forces on a body and its resulting translational and rotational motions.
Plane Motion: Motion of a body approximated as a thin slab confined to a plane, which contains the mass center, with forces projected onto this plane. Symmetrical bodies with appreciable dimensions normal to the plane can also be considered in plane motion.
To define the plane motion of a rigid body, two force equations and one moment equation (or equivalent) are needed.
Isolate the body or system to be analyzed using a free-body diagram to define it explicitly.
All external forces acting on the body or system should be identified after defining the complete external boundary.
The mass moment of inertia accounts for the radial mass distribution relative to a rotation axis and is crucial for solving rotational problems. Refer to Appendix B for calculation details.
General Equations of Motion
Force Equation: (Eq. 4/1)
The resultant of external forces () equals the body's mass (m) times the acceleration (a) of its mass center (G).
Moment Equation: (Eq. 4/9)
The resultant moment about the mass center ( ) equals the time rate of change of angular momentum about the mass center.
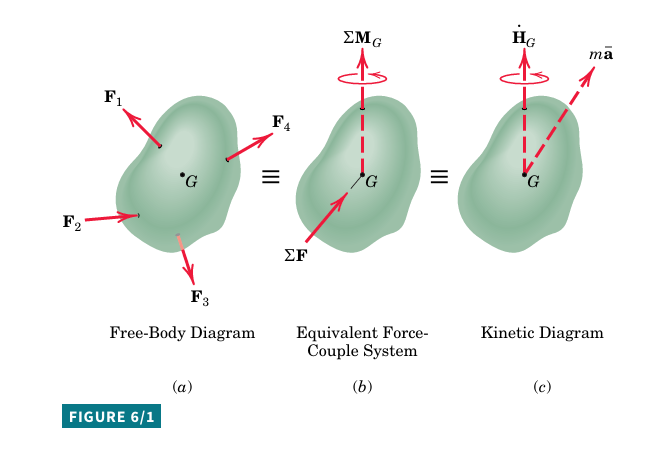
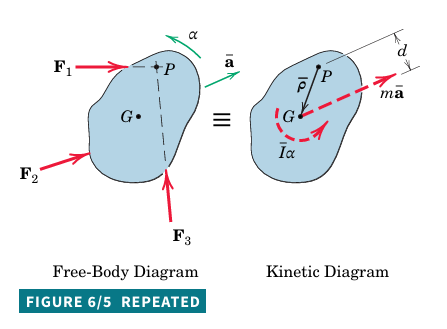
A general force system on a rigid body can be simplified into a resultant force at a chosen point and a corresponding couple.
By placing the resultant force through the mass center, you can better visualize force action and body response.
Free-body diagram: illustrates external forces acting on the body.
Kinetic diagram: Represents dynamic effects using Eqs. 4/1 and 4/9.
The equivalence between these diagrams helps visualize translational and rotational effects.
Plane-Motion Equations
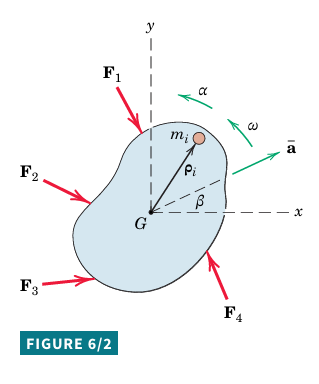
For plane motion in the x-y plane:
Angular velocity:
Angular acceleration: , both positive in the z-direction.
Use scalar notation ( and ) because the z-direction of and is perpendicular to the plane of motion.
Angular momentum about the mass center: , where is the position relative to G of the representative particle of mass .
For a rigid body, the velocity of relative to G is .
The magnitude of becomes .
The summation is the mass moment of inertia I about the z-axis through G.
where is a constant property representing rotational inertia.
The moment equation becomes where is the angular acceleration of the body.
General equations of motion for a rigid body in plane motion:
(6/1)
Alternative Moment Equations
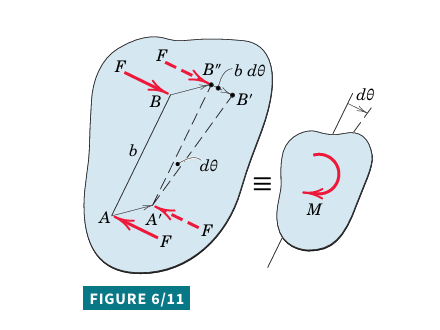
General equation for moments about an arbitrary point P (Eq. 4/11):
is the vector from P to the mass center G, and is the mass-center acceleration.
For rigid-body plane motion, becomes and is the moment of about P.
For a two-dimensional body: (6/2)
All terms are positive in the counterclockwise sense in the given example.
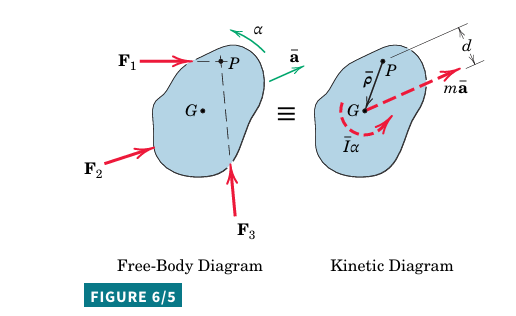
Alternative moment equation about P (Eq. 4/13):
If P is fixed to the body, becomes , where is the mass moment of inertia about an axis through P and is the angular acceleration of the body.
So, (6/3)
When , P is the mass center G, and .
When P is a nonaccelerating point O fixed to the body, , and (6/4).
Equation 6/4 applies to rotation about a nonaccelerating point O fixed to the body and simplifies Eq. 4/7.
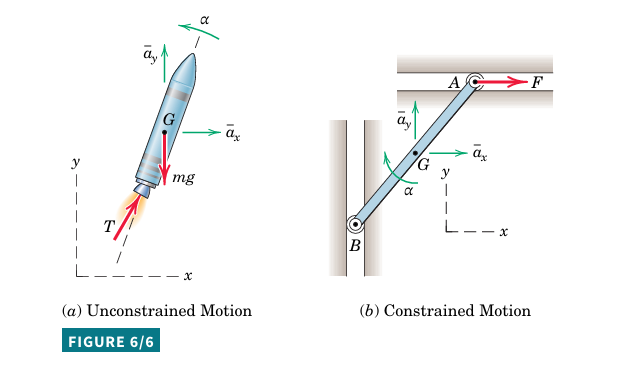
Unconstrained and Constrained Motion
Unconstrained Motion: No physical constraints (e.g., rocket in vertical plane).
Acceleration components ( , ) and angular acceleration are independent.
Constrained Motion: Motion is physically confined (e.g., bar with guided ends).
Kinematic relationships between acceleration components and angular acceleration exist.
Requires kinematic analysis to relate linear and angular acceleration before solving force and moment equations.
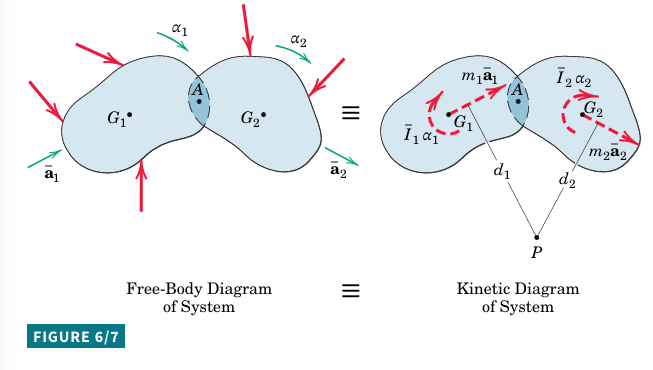
Systems of Interconnected Bodies
For interconnected bodies with kinematically related motions, analyze the bodies as a system.
Forces at connections are internal and not considered.
(6/5)
\\Sigma M_P = \Sigma I \alpha + \Sigma mad
Summations represent terms for each separate body.
If the system has more than three unknowns, dismember it and analyze each part separately.
Analysis Procedure
1. Kinematics:
Identify the type of motion.
Solve for linear and angular accelerations using kinematic information.
For constrained motion, relate linear acceleration to angular acceleration using relative-velocity and relative-acceleration equations.
2. Diagrams:
Draw a complete free-body diagram, assigning a coordinate system and labeling quantities.
Construct a kinetic diagram to clarify the equivalence between forces and dynamic response.
3. Equations of Motion:
Apply motion equations from Eqs. 6/1.
Use Eq. 6/2 or 6/3 as an alternative moment equation.
Combine with kinematic analysis results.
Ensure the number of independent equations equals the number of unknowns.
For solvable plane motion, there can be no more than five scalar unknowns determined from three motion equations and two relative-acceleration component relations.
Translation
In translation, all lines in a moving body remain parallel to their original positions.
Rectilinear Translation: Points move in straight lines.
Curvilinear Translation: Points move on congruent curved paths (curved paths that are identical in shape and size).
No angular motion occurs, so and are zero.
Moment of inertia is irrelevant for a translating body.
Equations:
(6/6)
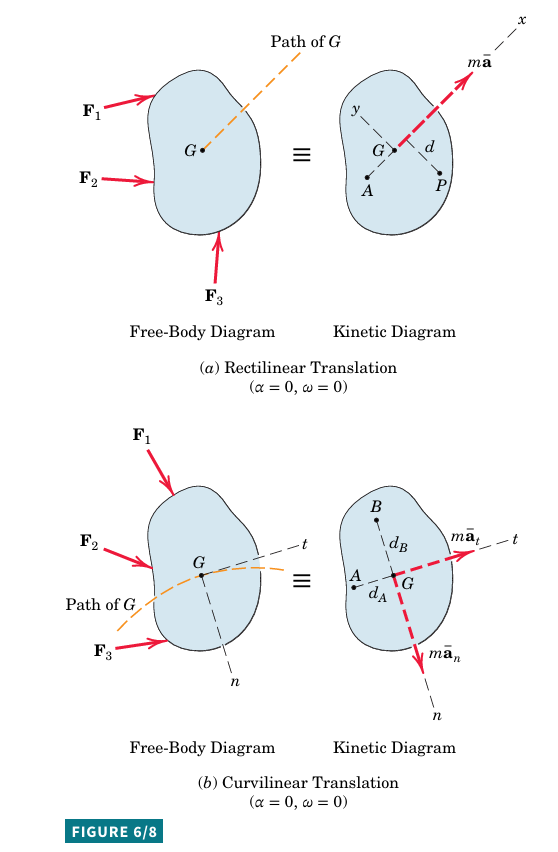
For rectilinear translation with the x-axis in the acceleration direction, and .
For curvilinear translation using n-t coordinates, and .
In both cases, .
Alternative moment equation (Eq. 6/2) can be used.
For rectilinear translation, and .
For curvilinear translation, and .
Fixed-Axis Rotation
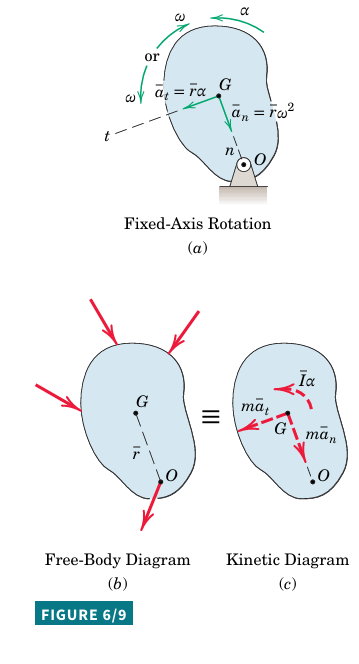
Points in the body describe circles around the rotation axis.
All lines in the plane of motion have the same and .
Mass center acceleration components are easily expressed in n-t coordinates: and .
General equations for plane motion:
Scalar components: and .
Applying the moment equation about G requires accounting for the force applied at O.
Direct moment equation about the rotation axis O:
(6/4)
For rotation about the mass center G, a = 0, thus , and the resultant of forces is the couple .
General Plane Motion
Combines translation and rotation.
Equations:
Solving Plane-Motion Problems:
Choice of Coordinate System: Use the system that best describes the mass center's acceleration (rectangular, normal-tangential, polar).
Choice of Moment Equation: Use the alternative relation for moments about any point P, Eq. 6/2:
Consider using Eq. 6/3 when moments are about a point P with a known acceleration .
Nonaccelerating point O on the body use the following equation: .
Constrained versus Unconstrained Motion:
Constrained kinematic relationship between linear and angular accelerations and incorporate it into our force and moment equations of motion.
Unconstrained accelerations can be determined independently of one another by direct application of the three motion equations, Eqs. 6 ∕1.
Number of Unknowns:
Check that total number of unknowns is less than or equal to number of equations which can be derived. For plane motion we have three scalar equations of motion and two scalar components of the vector relative-acceleration equation for constrained motion.
Identification of the Body or System:
Emphasize the importance of clearly choosing the body to be isolated and representing this isolation by a correct free-body diagram.
Kinematics:
Thorough review of the relative-acceleration relations for plane motion will be most helpful.
Consistency of Assumptions:
Assumptions must be consistent with the principle of action and reaction any kinematic requirements
Work-Energy Relations
Work of Forces and Couples: