EXSS3062 Week 3 Lecture 2
Got it! Here’s the detailed slide-by-slide summary for the actual 18 slides:
Slide 1: Title Slide
• Course: EXSS3062: Motor Control and Learning
• Topic: Motor Learning (ML 3) – Building Blocks of Movement Skill Acquisition
• Presenter: Dr. Shaun Abbott, Discipline of Exercise and Sport Science
Slide 2: Acknowledgement of Country
• Recognizes Traditional Owners of Australia and their connection to land, water, and culture.
• Specific acknowledgment of the Gadigal people of the Eora Nation.
Slide 3: Unit & Lecture Learning Outcomes
• Unit Learning Outcomes:
1. Explain & evaluate theoretical models of motor control & skill learning.
2. Understand individual constraints and their impact on motor skill learning.
• Lecture Learning Outcomes:
1. Identify principles to enhance motor skill learning.
2. Understand how learning principles vary across different stages.
3. Apply the Skill Acquisition Periodisation (SAP) Framework to training structure.
Slide 4: Recommended Readings
• Magill & Anderson (2021) – Motor Learning & Control (Ch. 16-18)
• Hodges & Williams (2019) – Skill Acquisition in Sport (Ch. 9)
• Farrow & Robertson (2017) – SAP Framework in High-Performance Sport
• Readings available on Canvas.
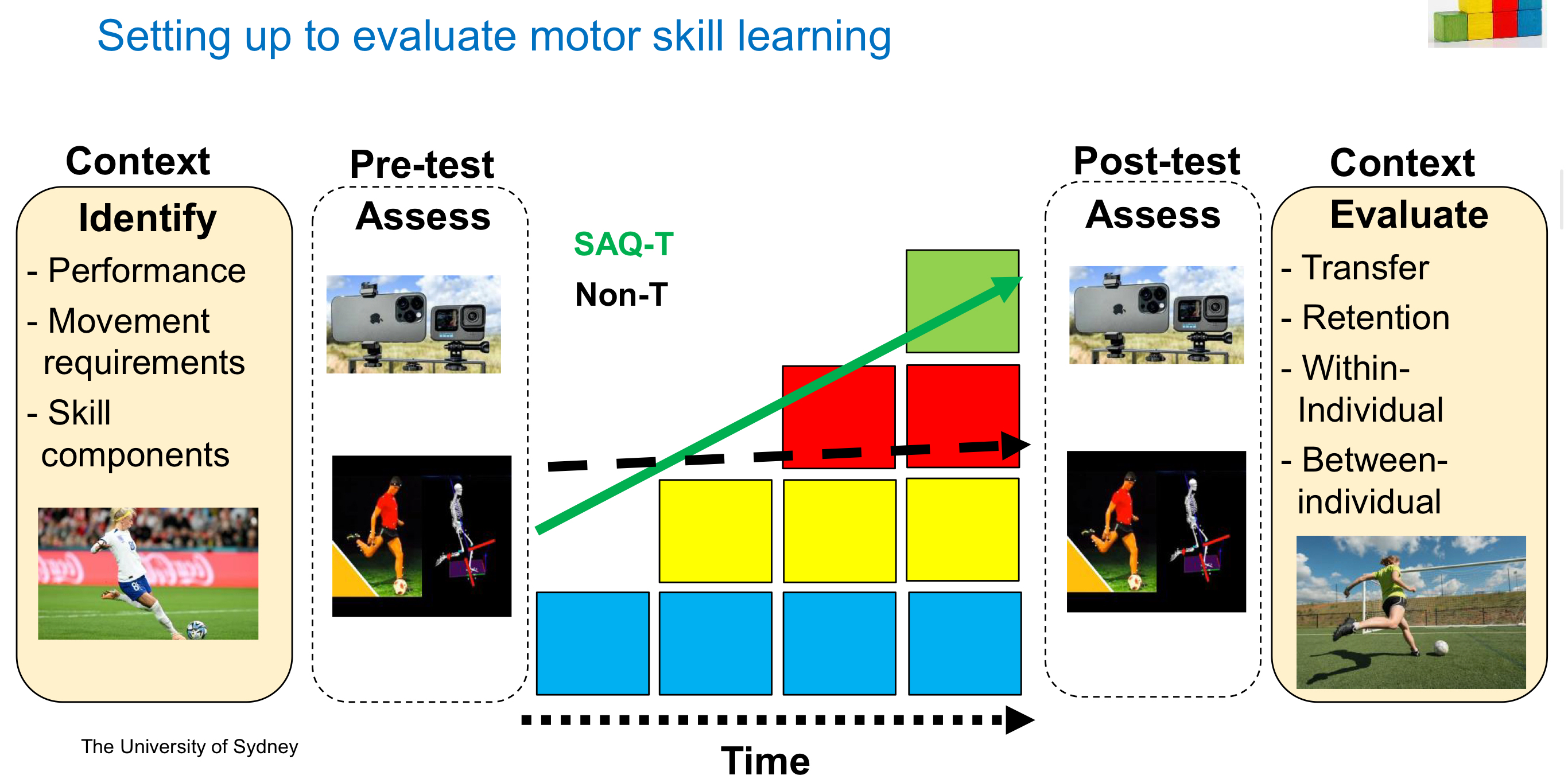
Slide 5-7: Evaluating Motor Skill Learning
• Setting up skill learning assessment using pre- and post-tests.
• Key measures:
• Performance and movement requirements
• Skill components (e.g., technical aspects)
• Evaluation metrics:
• Transfer (how well skills transfer to new tasks)
• Retention (how well skills are retained over time)
• Individual variations in learning
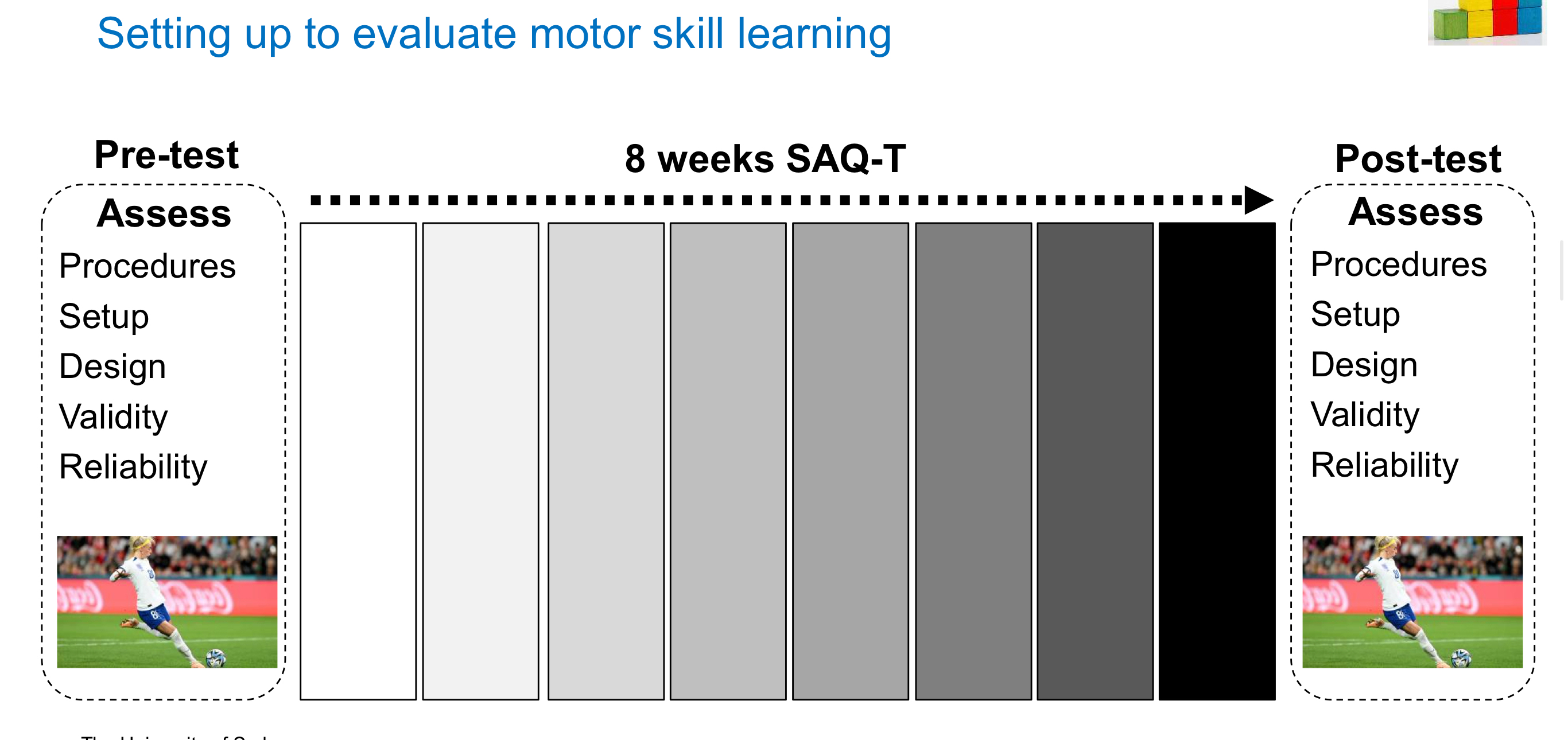
• Assessment considerations:
• Validity & reliability of tests
• 8-week SAQ-T (Skill Acquisition Training)
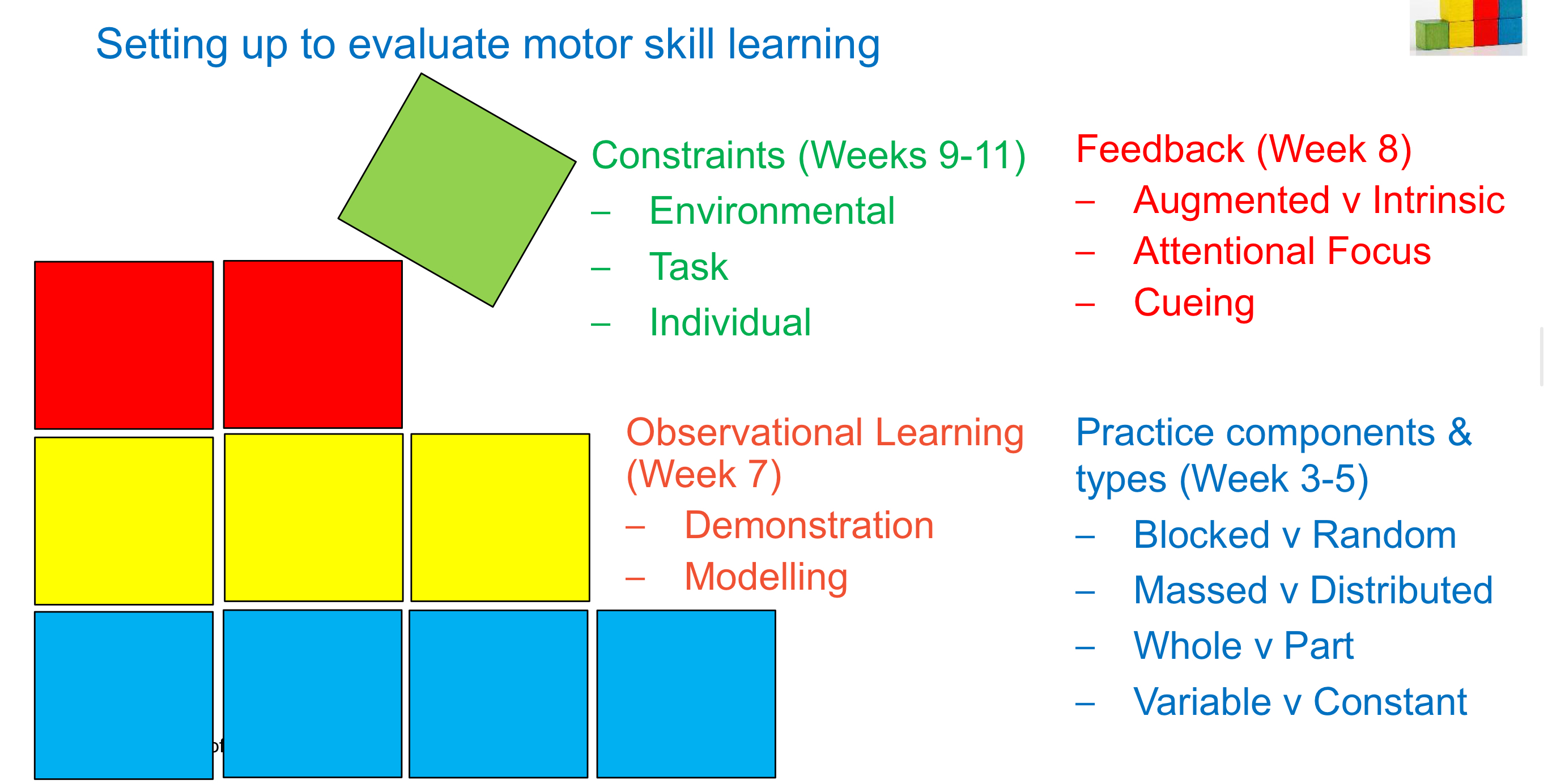
Slide 8: Types of Practice & Feedback
• Practice Types (Weeks 3-5)
• Blocked vs. Random
• Massed vs. Distributed
• Whole vs. Part
• Variable vs. Constant
• Observational Learning (Week 7)
• Demonstration & Modeling
• Feedback (Week 8)
• Augmented vs. Intrinsic
• Attentional Focus & Cueing
• Constraints (Weeks 9-11)
• Environmental, Task, Individual constraints
Slide 9: Training Principles for Skill Development
• Specificity: How closely practice reflects real-game conditions.
• Progression: Gradual improvement in skill execution.
• Overload: Increased cognitive demand to enhance skill retention.
• Reversibility: Skill deterioration when practice stops.
• Tedium: Avoiding boredom in training.
Slide 10-11: SAP Framework & Learning Stages
• Key Considerations:
• Does training match real-world skill demands?
• Can the learner tolerate increased skill load?
• Managing cognitive fatigue (avoiding overtraining).
• Quality of practice > Quantity of practice.
• Skill Learning Stages:
• Cognitive Stage:
• Simple demonstrations & cues
• Blocked practice & skill segmentation
• High frequency of feedback
• Associative Stage:
• Longer practice durations
• Refining movement efficiency
• Filtering irrelevant sensory cues
• Autonomous Stage:
• Deliberate practice
• Increased randomized practice
• Feedback focused on technical refinement
Slide 12-13: Cognitive Load in Practice
• Type of practice impacts mental effort.
• Contextual Interference Effect:
• High variability = reduced short-term performance but better long-term retention.
• Fatigue Measures:
• Reaction time tasks (psychomotor speed)
• Athlete-perceived cognitive effort
Formula:
Skill Load = Frequency × Complexity
Slide 14-15: Managing Tedium in Training
• Key strategies:
• Encourage exploration & adaptation.
• Increase cognitive effort.
• Fit the movement to the learner (not the other way around).
• Use variability & constraints to modify practice.
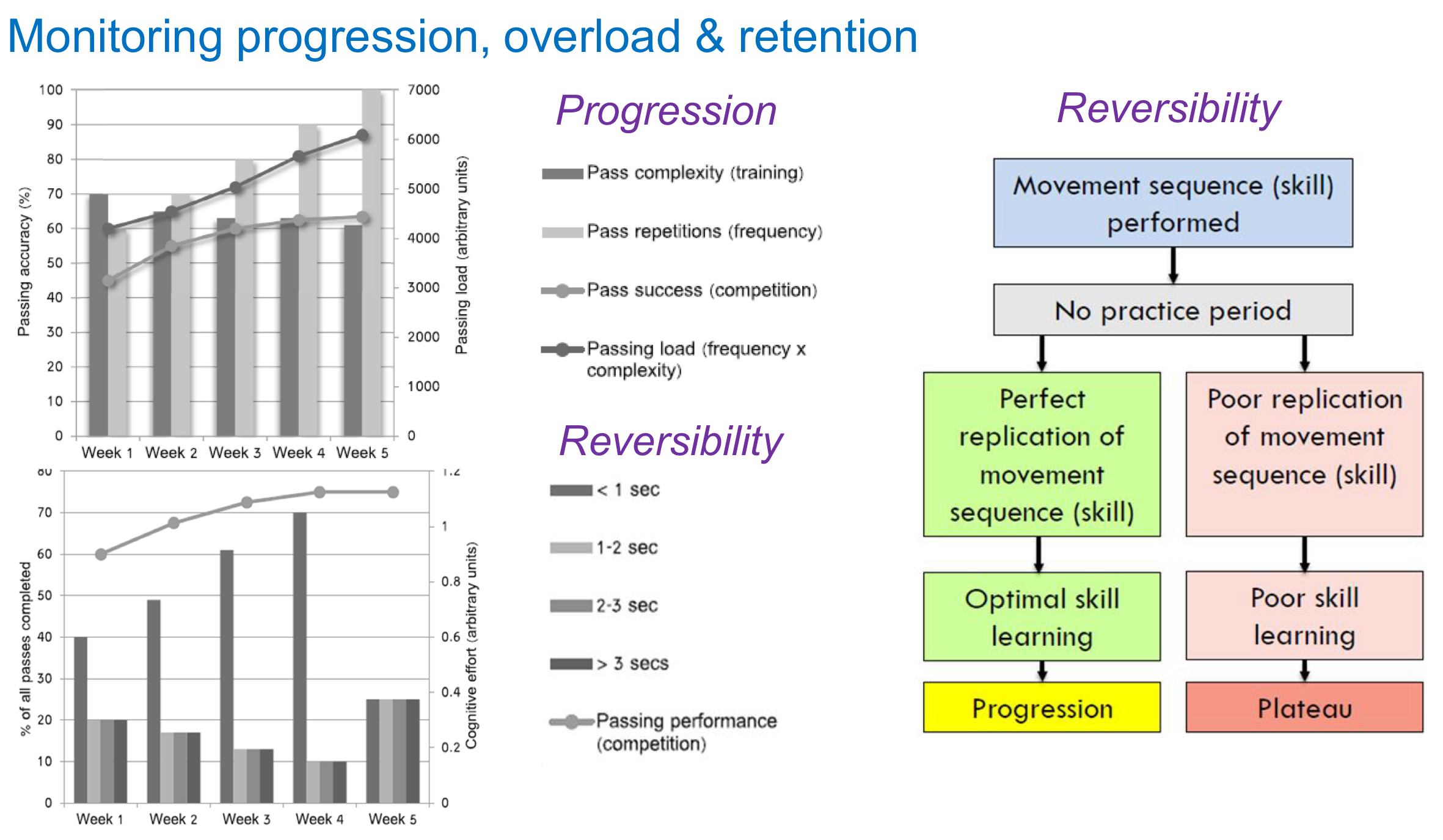
Slide 16-17: Applying SAP to Practice Scheduling
• Balance progression, overload, and retention.
• Adjust training to prevent overuse & burnout.
• Plan structured training blocks with appropriate rest & variation.
Slide 18: Post-Lecture Feedback
• Students encouraged to use Padlet for feedback.
• Next tutorial session in Susan Wakil Health Building.