Linear Functions
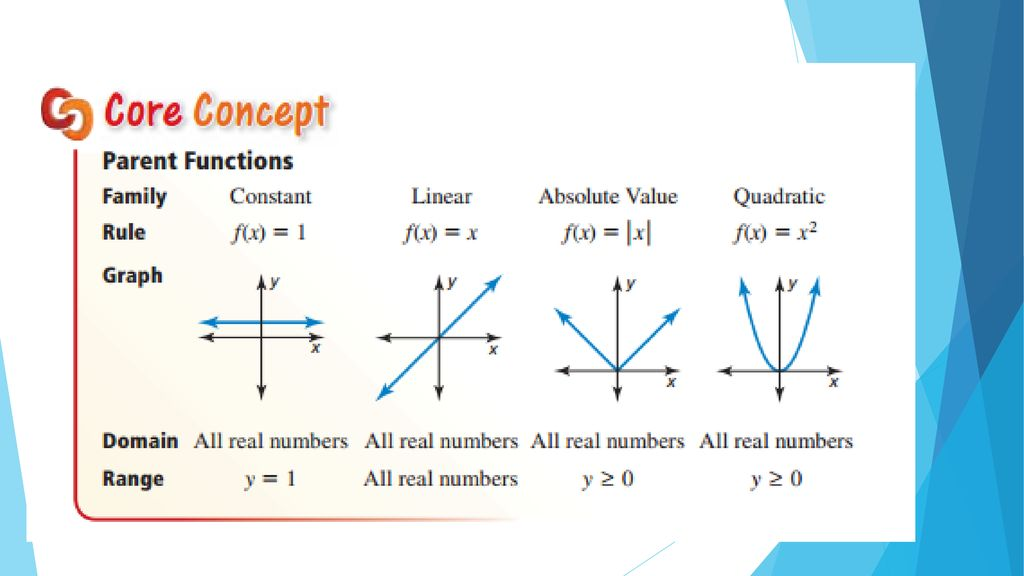
Functions that belong to the same family share key characteristics. The parent function is the most basic function in a family. Functions in the same family are transformations of their parent function.
EXAMPLE:
Identify the function family to which f belongs. Compare the graph of f to the graph of its parent function.

SOLUTION:
The graph of f is V-shaped, so f is an absolute value function. The graph is shifted up and is narrower than the graph of the parent absolute value function. The domain of each function is all real numbers, but the range of f is y ≥ 1 and the range of the parent absolute value function is y ≥ 0.
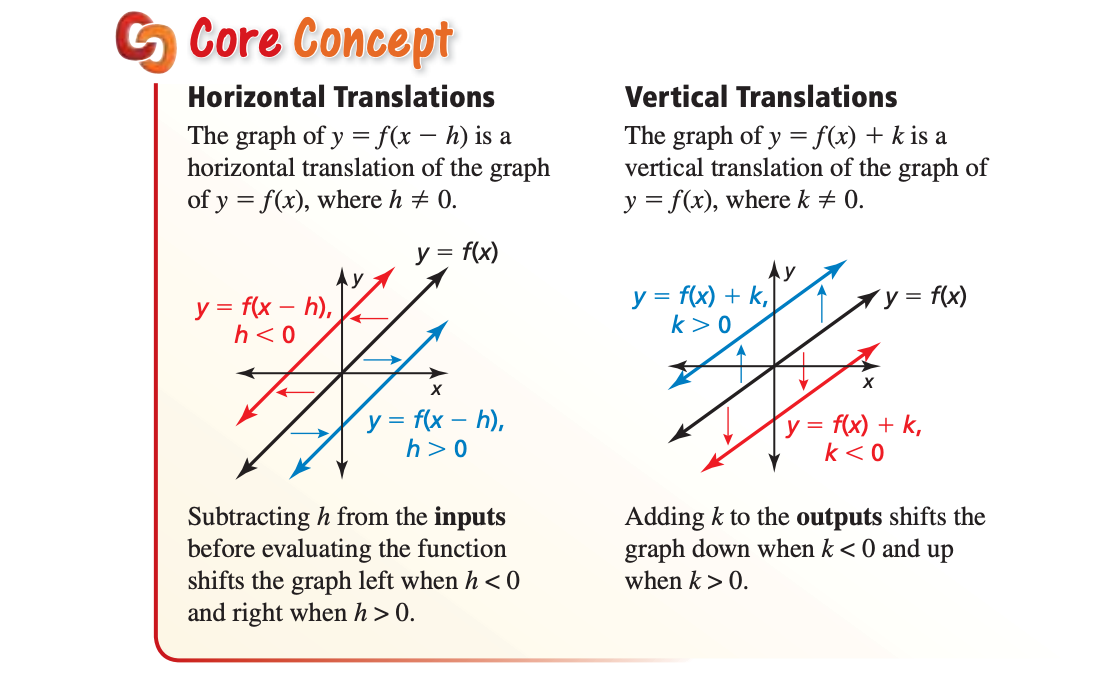
A transformation changes the size, shape, position, or orientation of a graph. A translation is a transformation that shifts a graph horizontally and/or vertically but does not change its size, shape, or orientation.
EXAMPLE:
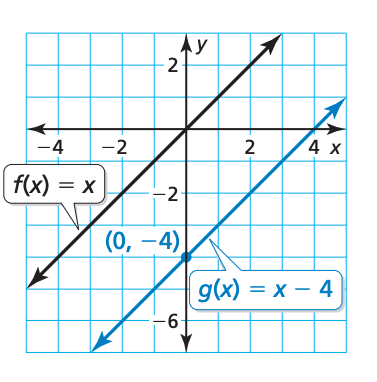
Graph g(x) = x − 4 and its parent function. Then describe the transformation.
SOLUTION:
The function g is a linear function with a slope of 1 and a y-intercept of −4. So, draw a line through the point (0, −4) with a slope of 1. The graph of g is 4 units below the graph of the parent linear function f. So, the graph of g(x) = x − 4 is a vertical translation 4 units down of the graph of the parent linear function.
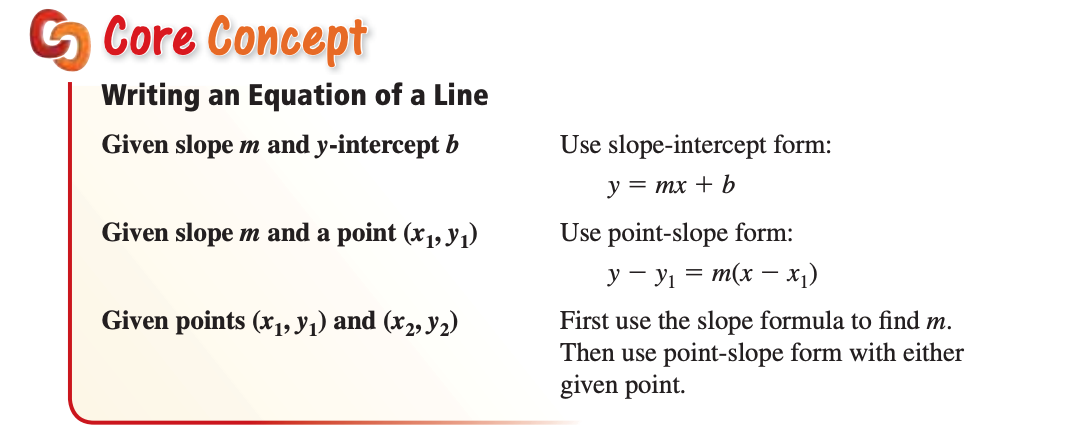
NOTE: The slope-intercept form of a linear equation is y = mx + b, where m is the slope and b is the y-intercept.
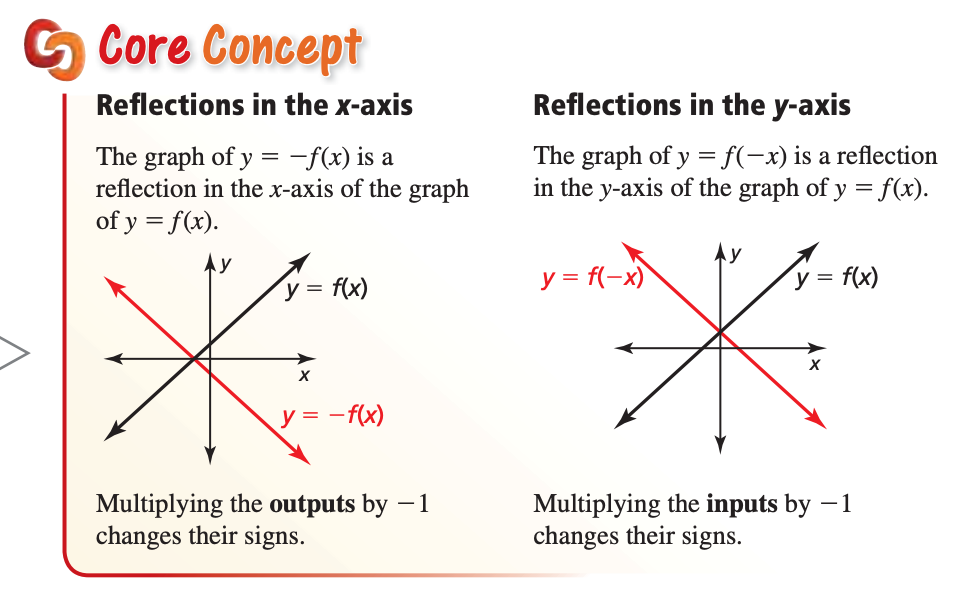
A reflection is a transformation that flips a graph over a line called the line of reflection. A reflected point is the same distance from the line of reflection as the original point but on the opposite side of the line.
EXAMPLE:
Graph p(x) = −x^2 and its parent function. Then describe the transformation.
SOLUTION:
The function p is a quadratic function. Use a table of values to graph each function

The graph of p is the graph of the parent function flipped over the x-axis.
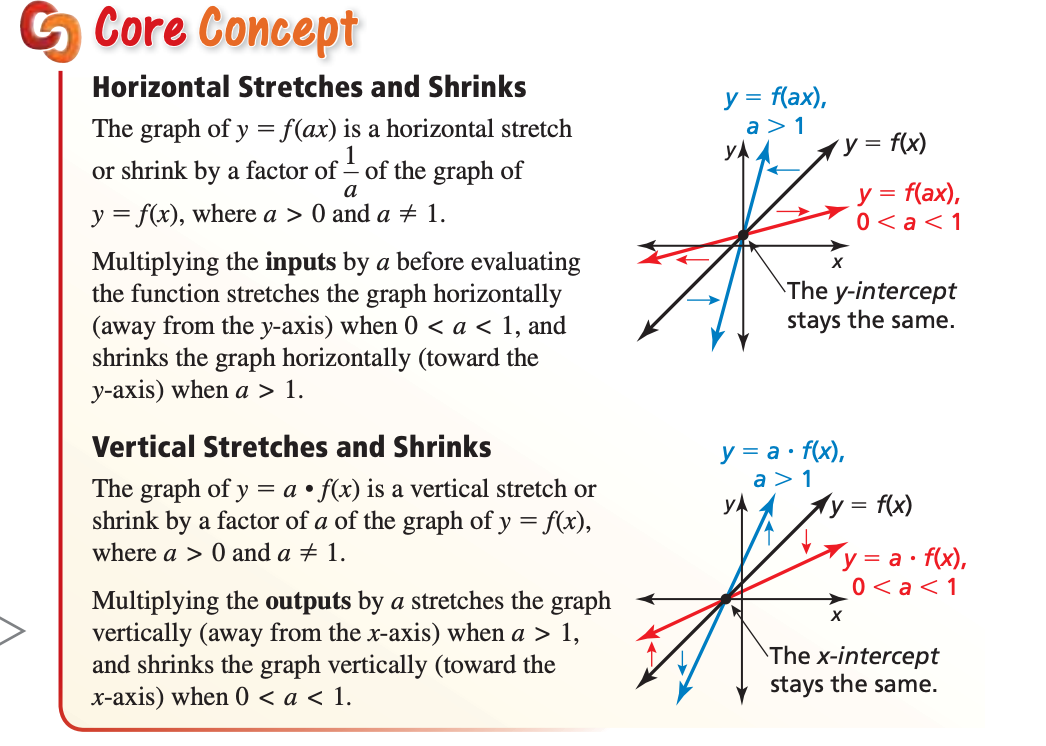
Another way to transform the graph of a function is to multiply all of the y-coordinates by the same positive factor (other than 1). When the factor is greater than 1, the transformation is a vertical stretch. When the factor is greater than 0 and less than 1, it is a vertical shrink.
EXAMPLE:
Graph g(x) = 2 ∣x∣ and its parent function. Then describe the transformation.
SOLUTION:
The function g is an absolute value function. Use a table of values to graph the functions.

The y-coordinate of each point on g is two times the y-coordinate of the corresponding point on the parent function. So, the graph of g(x) = 2 ∣x ∣ is a vertical stretch of the graph of the parent absolute value function.
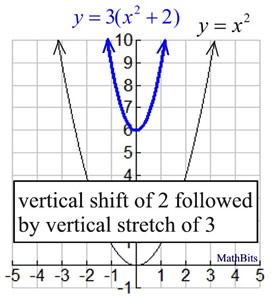
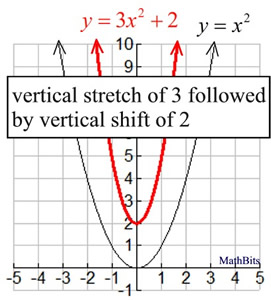
You can use more than one transformation to change the graph of a function.
You can use function notation to represent transformations of graphs of functions.
EXAMPLE: \n Let f(x) = 2x + 1. Write a function g whose graph is a translation 3 units down of the graph of f.
SOLUTION:
A translation 3 units down is a vertical translation that adds −3 to each output value

The translated function is g(x) = 2x − 2.
EXAMPLE:
Let f(x) = ∣x + 3 ∣ + 1. Write a function g whose graph is a refl ection in the x-axis of the graph of f.
SOLUTION:
A reflection in the x-axis changes the sign of each output value.

The reflected function is g(x) = −∣x + 3 ∣ − 1.
EXAMPLE: \n Let f(x) = ∣x − 3 ∣ − 5. Write (a) a function g whose graph is a horizontal shrink of the graph of f by a factor of ⅓.
SOLUTION:
A horizontal shrink by a factor of ⅓ multiplies each input value by 3.

The transformed function is g(x) = ∣3x − 3 ∣ − 5.
You can write a function that represents a series of transformations on the graph of another function by applying the transformations one at a time in the stated order.
EXAMPLE:
The graph shows the distance Asteroid 2012 DA14 travels in x seconds. Write an equation of the line and interpret the slope. The asteroid came within 17,200 miles of Earth in February, 2013. About how long does it take the asteroid to travel that distance?
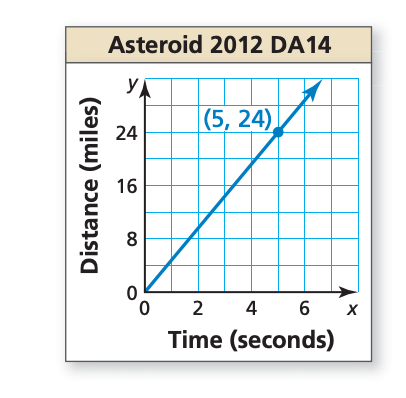
SOLUTION:
From the graph, you can see the slope is m = 24 —5 = 4.8 and the y-intercept is b = 0. Use slope-intercept form to write an equation of the line.
The equation is y = 4.8x. The slope indicates that the asteroid travels 4.8 miles per second. Use the equation to find how long it takes the asteroid to travel 17,200 miles
Because there are 3600 seconds in 1 hour, it takes the asteroid about 1 hour to travel 17,200 miles.
Data do not always show an exact linear relationship. When the data in a scatter plot shows an approximately linear relationship, you can model the data with a line of fi.
EXAMPLE:
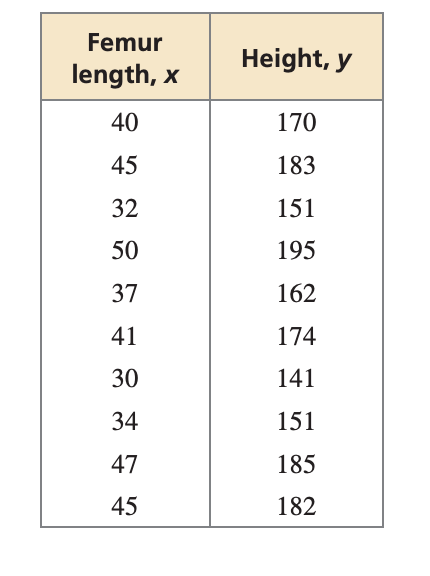
The table shows the femur lengths (in centimeters) and heights (in centimeters) of several people. Do the data show a linear relationship? If so, write an equation of a line of fi t and use it to estimate the height of a person whose femur is 35 centimeters long.

SOLUTION:
Step 1 Create a scatter plot of the data. The data show a linear relationship.
Step 2 Sketch the line that most closely appears to fit the data. One possibility is shown.
Step 3 Choose two points on the line. For the line shown, you might choose (40, 170) and (50, 195).
Step 4 Write an equation of the line.
The approximate height of a person with a 35-centimeter femur is 157.5 centimeters.
The line of best fit is the line that lies as close as possible to all of the data points. Many technology tools have a linear regression feature that you can use to find the line of best fit for a set of data. The correlation coefficient, denoted by r, is a number from −1 to 1 that measures how well a line fits a set of data pairs (x, y). When r is near 1, the points lie close to a line with a positive slope. When r is near −1, the points lie close to a line with a negative slope. When r is near 0, the points do not lie close to any line.
A linear system is consistent when it has at least one solution. A linear system is inconsistent when it has no solution.
A linear equation in three variables x, y, and z is an equation of the form ax + by + cz = d, where a, b, and c are not all zero. The following is an example of a system of three linear equations in three variables.
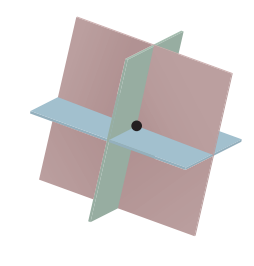
A solution of such a system is an ordered triple (x, y, z) whose coordinates make each equation true. The graph of a linear equation in three variables is a plane in three-dimensional space. The graphs of three such equations that form a system are three planes whose intersection determines the number of solutions of the system.
Exactly One Solution: The planes intersect in a single point, which is the solution of the system.
Infinitely Many Solutions: The planes intersect in a line. Every point on the line is a solution of the system. The planes could also be the same plane. Every point in the plane is a solution of the system.

No Solution: There are no points in common with all three planes.

The algebraic methods you used to solve systems of linear equations in two variables can be extended to solve a system of linear equations in three variables.
EXAMPLE:
Solve the system.
4x + 2y + 3z = 12
2x − 3y + 5z = −7
6x − y + 4z = −3
SOLUTION: \n Rewrite the system as a linear system in two variables.
Solve the new linear system for both of its variables.

Substitute x = −1 and z = 2 into an original equation and solve for y.

The solution is x = −1, y = 5, and z = 2, or the ordered triple (−1, 5, 2). Check this solution in each of the original equations.