Lecture 10
IV Estimation in Simple Regression
Regression Model:
yt = \alpha + \beta xt + u_tAssumption: {Cov}(xt, ut) ≠ 0
Existence of Instrument: Variable such that:
{Cov}(xt, zt) ≠ 0 (Relevance)
{Cov}(zt, ut) = 0 (Validity)
IV Estimators:
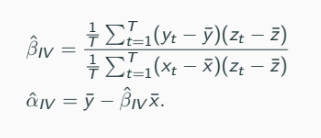
Properties of the IV Estimator
Consistent Estimators (TS1 - TS3):
is a consistent estimator of
is a consistent estimator of
Statistical Inference Result:
Conditional Variance:
If (Homoskedasticity),
In this case,
Other Issues Related to Stochastic Regressors
Model Specification:
Regression Model:
Assumptions Violations:
(xt, ut) is iid
If (Exogeneity Violation):
OLS Estimator fails.
Conditional Heteroskedasticity
If , the variance depends on .
Implications for OLS Estimator:
Unbiased:
Error:
Therefore,
Variance of the OLS Estimator:
When no conditional heteroskedasticity:
Estimated by instead of
Statistical Inference under Heteroskedasticity
Use of Robust Standard Errors:
Remedies for heteroskedasticity: use White’s or HAC Standard Errors.
Hypothesis Testing and Confidence Intervals are then valid.
Conditional Autocorrelation
Definition:
Correlation of Errors:
Implies OLS Estimator is unbiased but requires a careful derivation for the standard error.
Basics on Time Series
Importance in Economics:
Key Models: - Autocorrelation in linear regression framework must be understood.
Autocovariance and Autocorrelation
Definitions:
Autocovariance:
Autocorrelation:
Stationary Time Series
Definitions of Stationarity:
Strictly Stationary: Joint distributions invariant under time shifts.
Weakly Stationary: Mean, Variance constant, Autocovariance depends only on lag.
Autocovariance Function:
Examples of Time Series Models
White Noise:
Moving Average Processes (MA(1)):
AR(p) Models
Model Specification:
AR(1) Model and Covariance Stationary
Condition for Stationarity: |\phi1| < 1 \Rightarrow Cov(Xt) \text{ stationary}
If , series is generally not stationary, exemplified by random walk behaviour.