Here are extremely detailed slide-by-slide notes for Week 11 – Motor Control (MC11): Energetics as a Driver of Movement Changes, from your EXSS3062 lecture:
Slide 1: Title Slide
Unit: EXSS3062 – Motor Control & Learning
Topic: MC11 – Energetics as a Driver of Movement Changes
Lecturer: Prof. Stephen Cobley
Acknowledgement of Country and copyright statement included
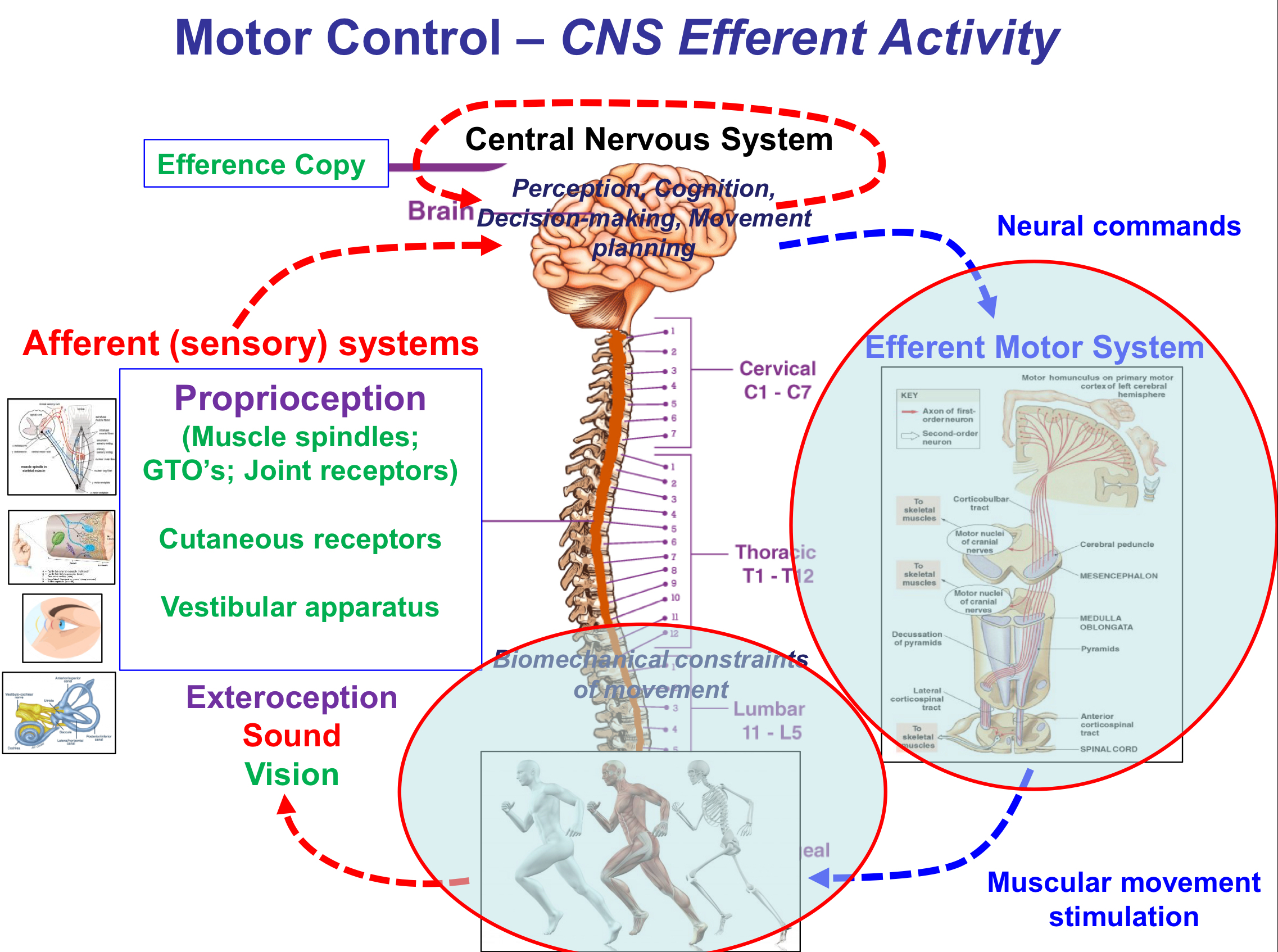
Slide 2: Overview Diagram
Shows interaction between:
Afferent sensory systems (e.g., proprioception, vestibular, exteroception)
Efferent motor system (neural commands from CNS to muscles)
Central processing: perception, cognition, decision-making, motor planning
Emphasis on motor control through CNS efferent activity
Slide 3–4: Learning Outcomes
Recognise that skill development includes efficiency/economy
Define and differentiate between efficiency and economy
Understand how energetic changes relate to task adaptation (e.g., speed/pace)
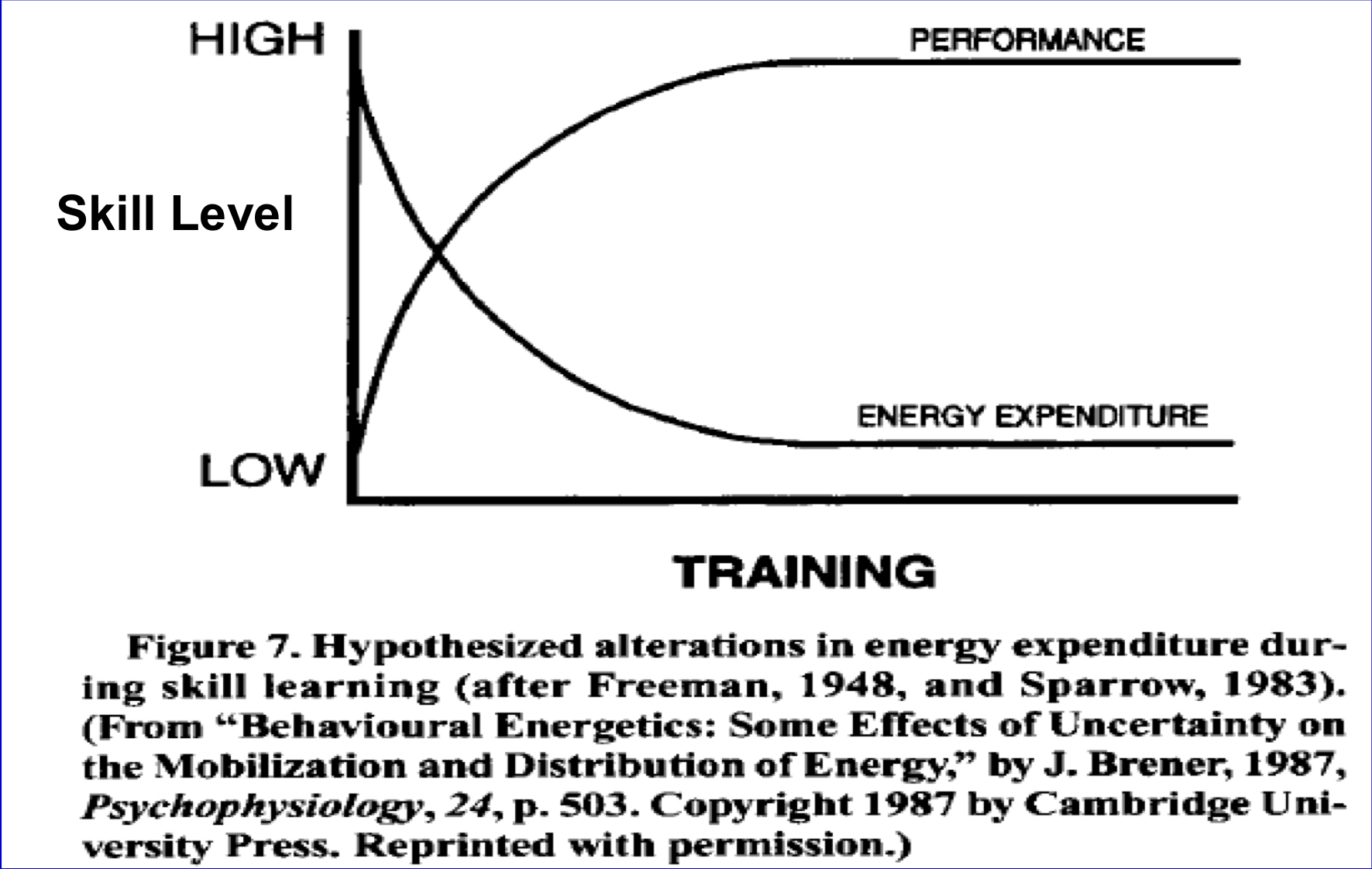
Explain neural and energetic changes with skill learning
Compare skilled vs. unskilled performance from an energy perspective
Slide 5: Recommended Readings
Sparrow & Newell (1998) – Key article on metabolic energy expenditure
Poole & Ross (1983) – Study on energy cost in sheep shearing
Lay et al. (2002) – Practice effects on energy expenditure & coordination
Slide 6–7: Skill Definition
Definitions from Knapp (1964), Singer (1975), and Welford (1976)
Emphasis on:
Learned ability to produce outcomes with maximum certainty
Achieved with minimum energy or time
Skill is not only learning, but involves efficiency and economy
Slide 8: Evolutionary Purpose of Energy Efficiency
Energy conservation had survival advantages
Efficient movement enables:
More work for same energy
Energy savings for other tasks
Skill learning involves controlling/modifying energy cost
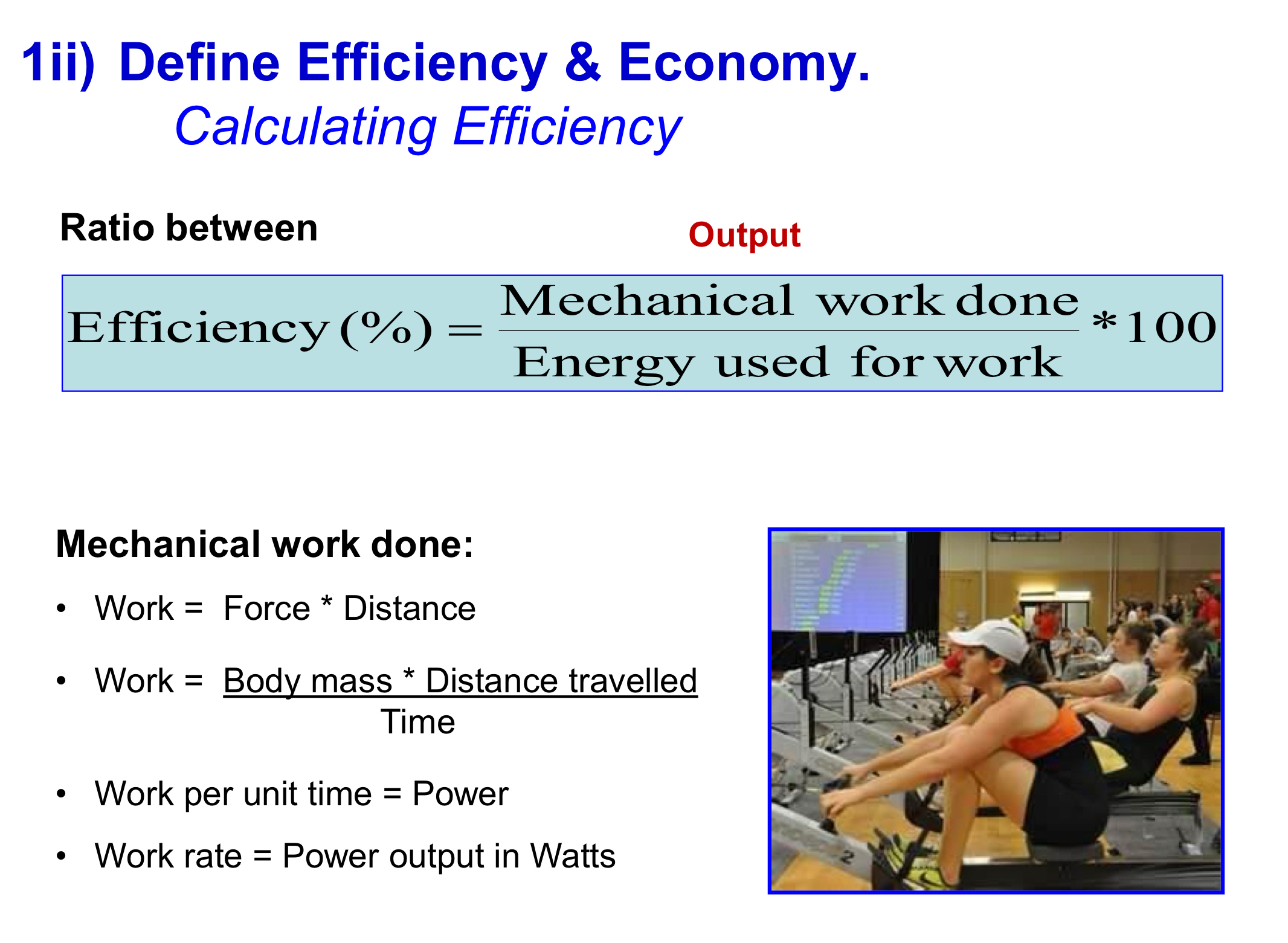
Slide 9: Efficiency Formula
Efficiency = (Mechanical Work Done / Energy Used for Work) × 100
Mechanical Work:
Force × Distance
Often calculated as Body Mass × Distance / Time = Power
Input (Energy Used):
Muscle activation (via chemical energy)
Indirect calorimetry used (O2 consumption = energy expenditure)
Slide 10–11: Why Economy Is Used Instead
Mechanical work is difficult to measure during submaximal, repetitive tasks
Hence, economy = oxygen cost to complete a fixed task
More practical for cyclical or fixed-rate tasks (e.g., walking, cycling)
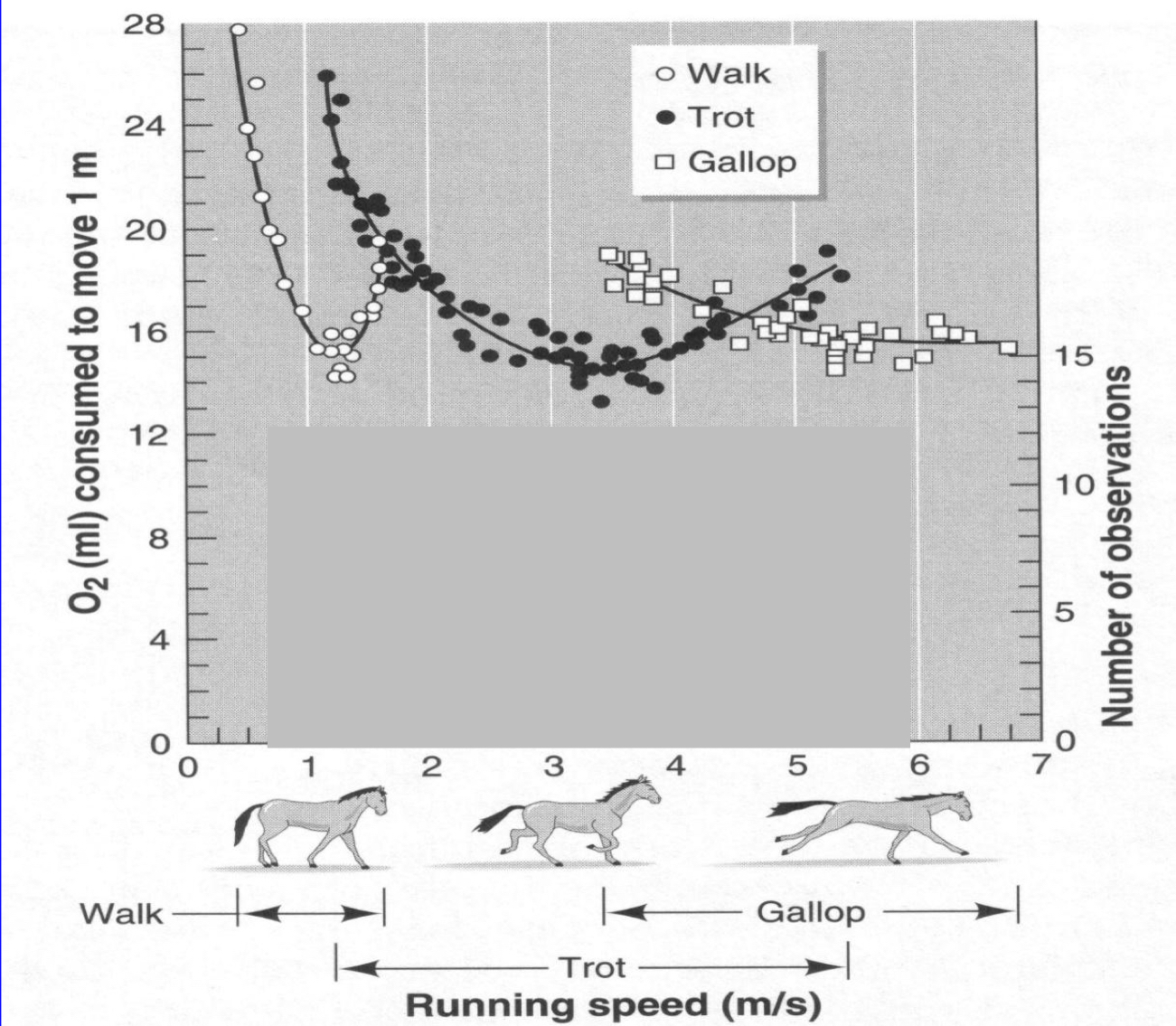
Slide 12–13: Efficiency vs Economy – Example in Horses
Hoyt & Taylor (1981): Horses on treadmill at different gaits
Each gait (walk, trot, gallop) has an optimal speed where energy cost is lowest
Similar energy efficiency patterns exist in humans
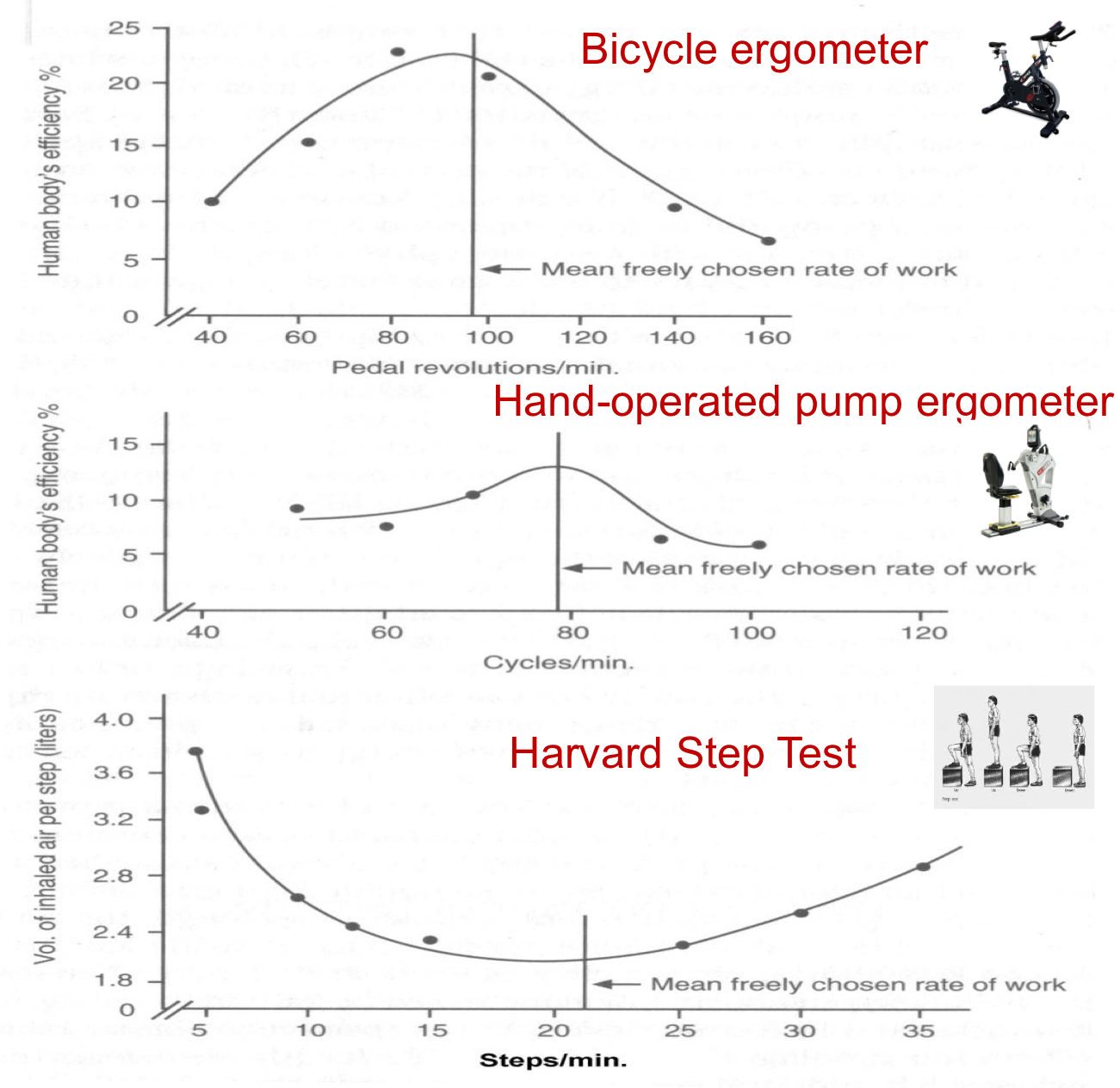
Slide 14–15: Preferred Movement Speeds
Horses (and humans) choose speeds that align with maximal efficiency
Distribution of preferred speeds in bar graph confirms this
Example extended to:
Bicycle ergometer
Step test
Hand pump ergometer
Freely chosen pace ≈ peak efficiency pace
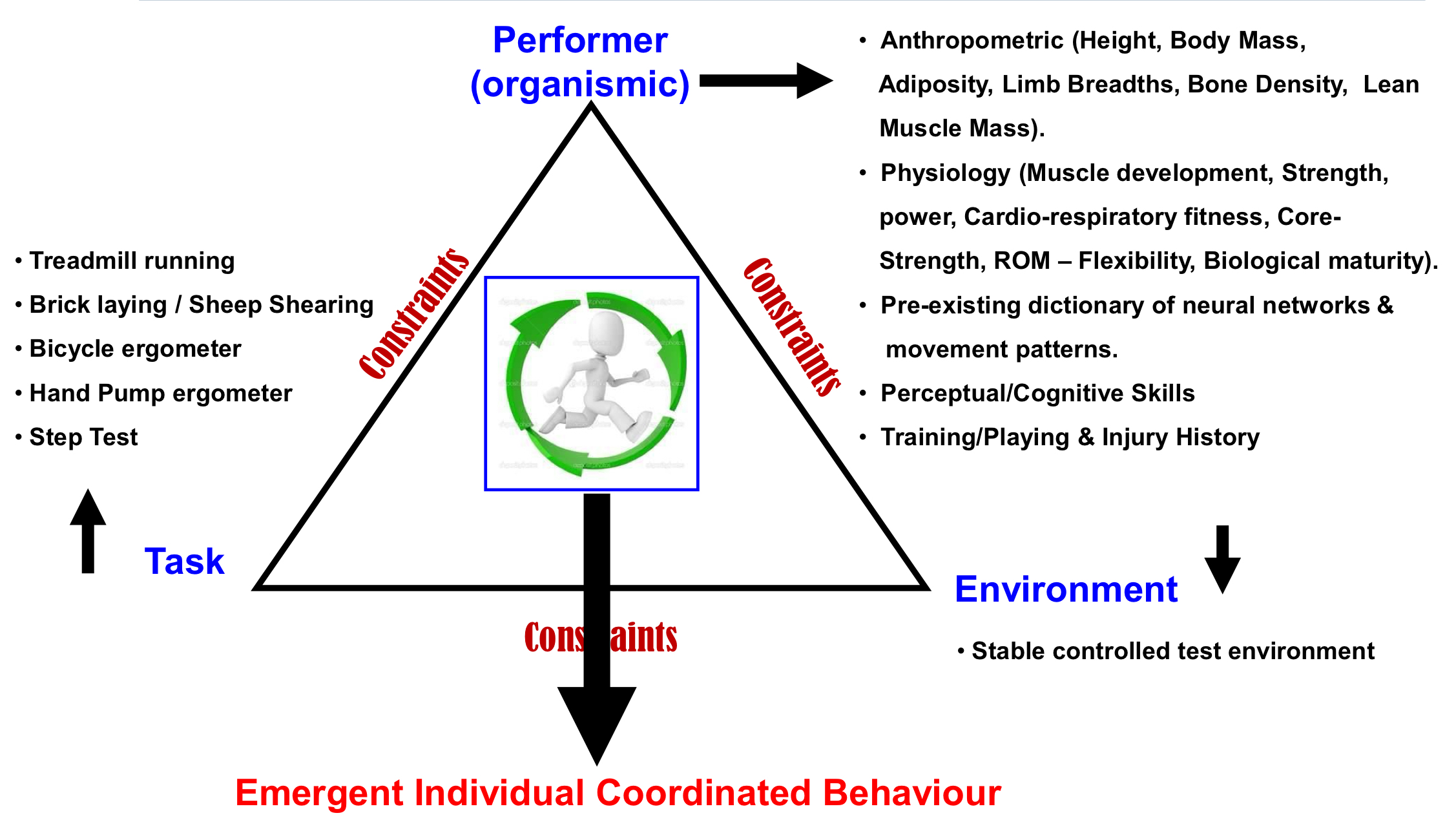
Slide 16: Constraints-Based Framework
Influences on efficiency and energy use fall under 3 constraints:
Organismic (Performer): body comp, strength, flexibility, skill history
Task: nature of the movement (e.g., treadmill vs shearing)
Environment: test conditions or real-world environment
Coordinated movement emerges from interaction of these constraints
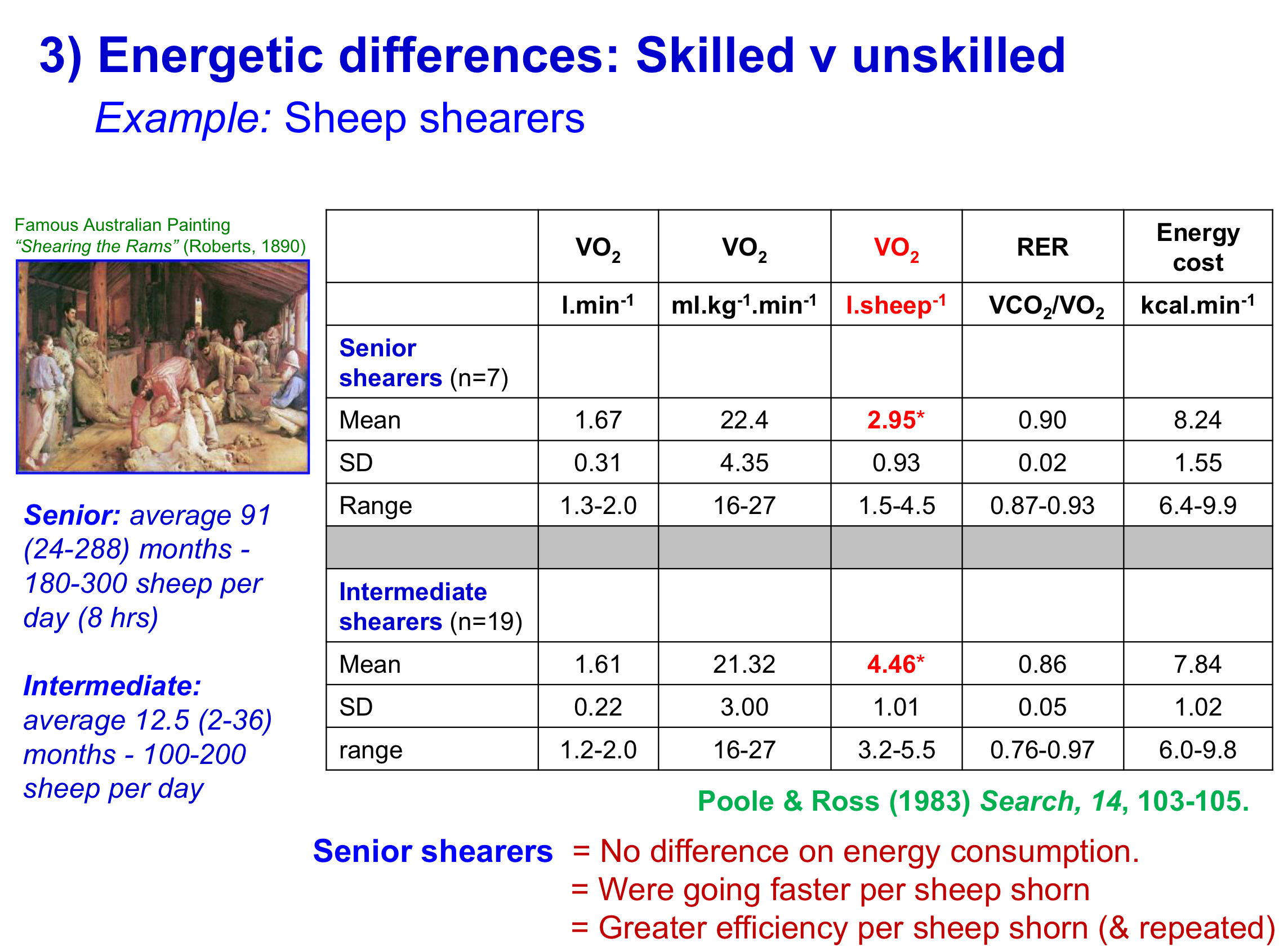
Slide 17–18: Skilled vs Unskilled – Sheep Shearers Example
Senior vs Intermediate shearers:
Similar O2 consumption
Senior shearers were faster per sheep, thus more efficient
Result = lower energy cost per sheep
Efficiency developed via skill and repetition over time
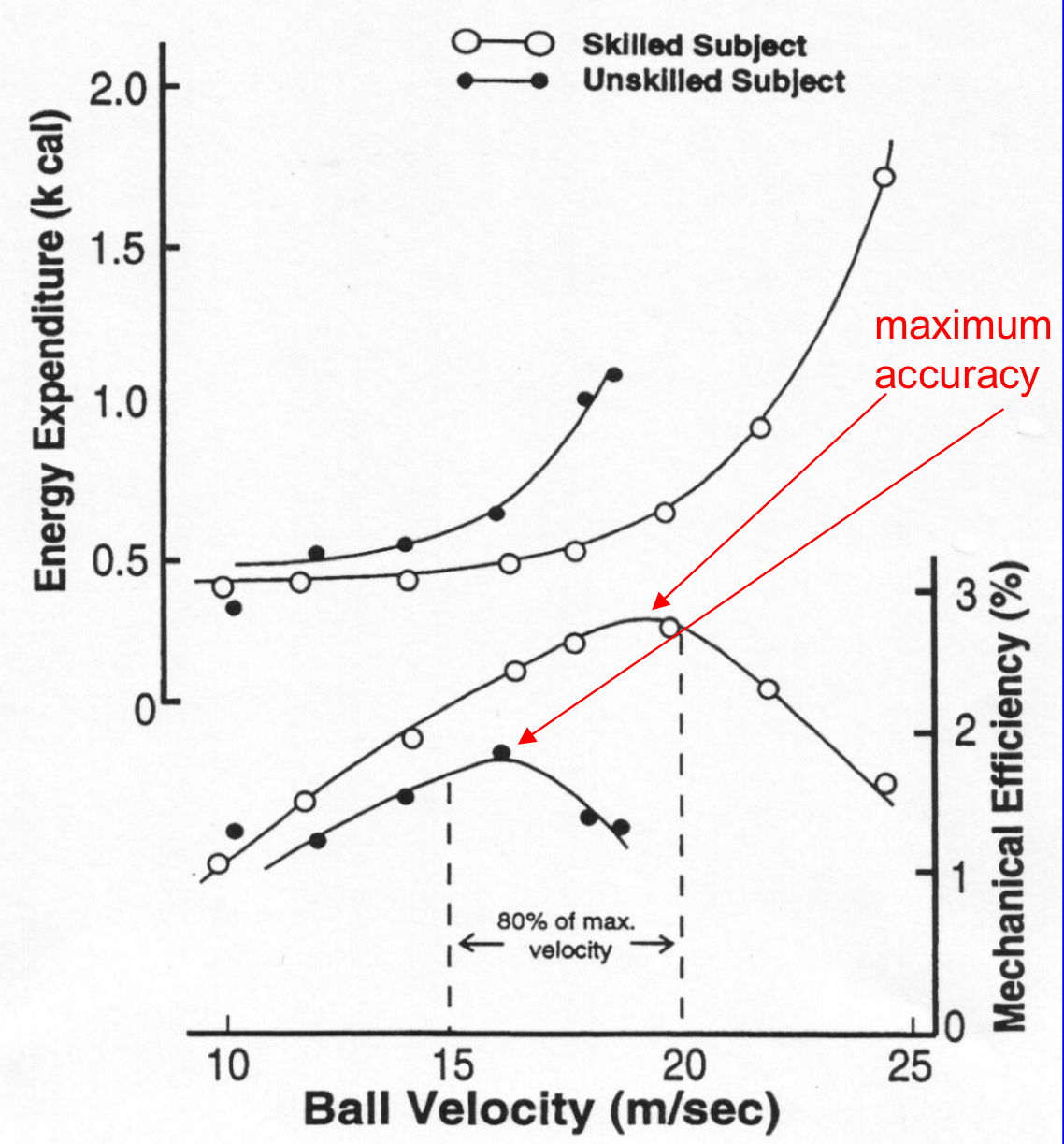
Slide 19: Soccer Kicking Example
Asami et al. (1976): Skilled vs unskilled soccer players
Findings:
Energy ↑ with ball speed
Skilled players used less energy at given velocity
Best accuracy at 80% of max speed for both groups
Skilled players had greater accuracy at higher speeds
Slide 20: Penalty Kick Example
Chloe Kelly (2023 World Cup): 30.84 m/s penalty kick (faster than men’s EPL average)
Factors in energy transfer:
Foot speed, hip/knee ROM
Stance, posture, coordination
High-level coordination allows optimal force transfer, showing energetic efficiency
Slide 21: Skilled Movement Requires Coordination of Constraints
Energy-efficient movement arises from:
Anatomical/biomechanical constraints
Environmental and task demands
Reinforces the interaction of performer-task-environment
Slide 22: Lay et al. (2002) Study Overview
Participants: 6 male rowing novices, trained over 40 days
Constant work rate (100W), but efficiency and coordination improved
Measured: EMG, force, stroke rate, O2 consumption, HR, RPE, economy
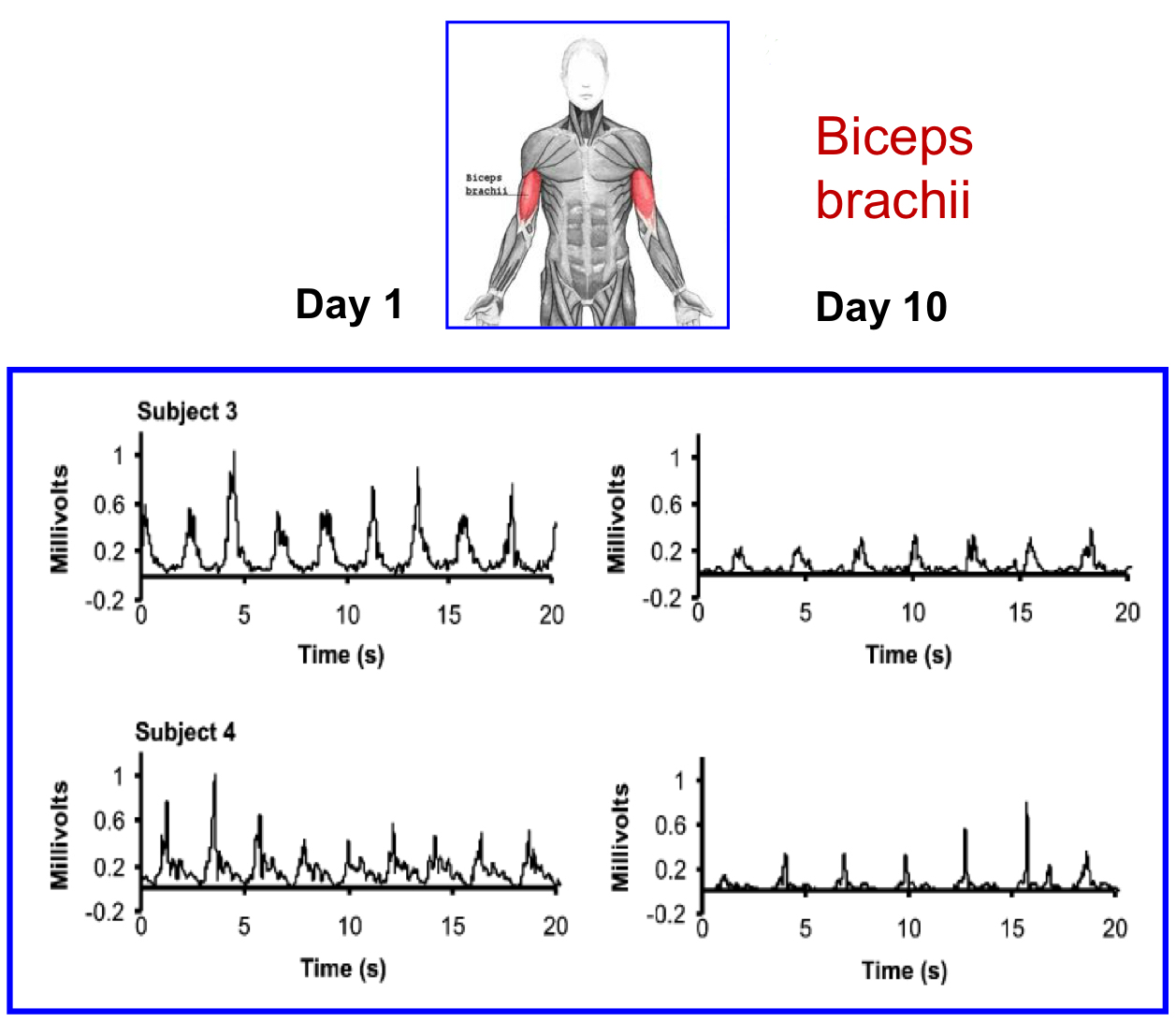
Slide 23: EMG Findings – Biceps Brachii
From Day 1 to Day 10:
↓ magnitude and duration of muscle activation
Shift to shorter, discrete bursts with rest intervals
Indicates refined neuromuscular control and improved coordination
Slide 24: EMG Findings – Vastus Lateralis
Similar pattern to biceps brachii
Greater cycle consistency
↓ bursts of activity = ↓ energy usage
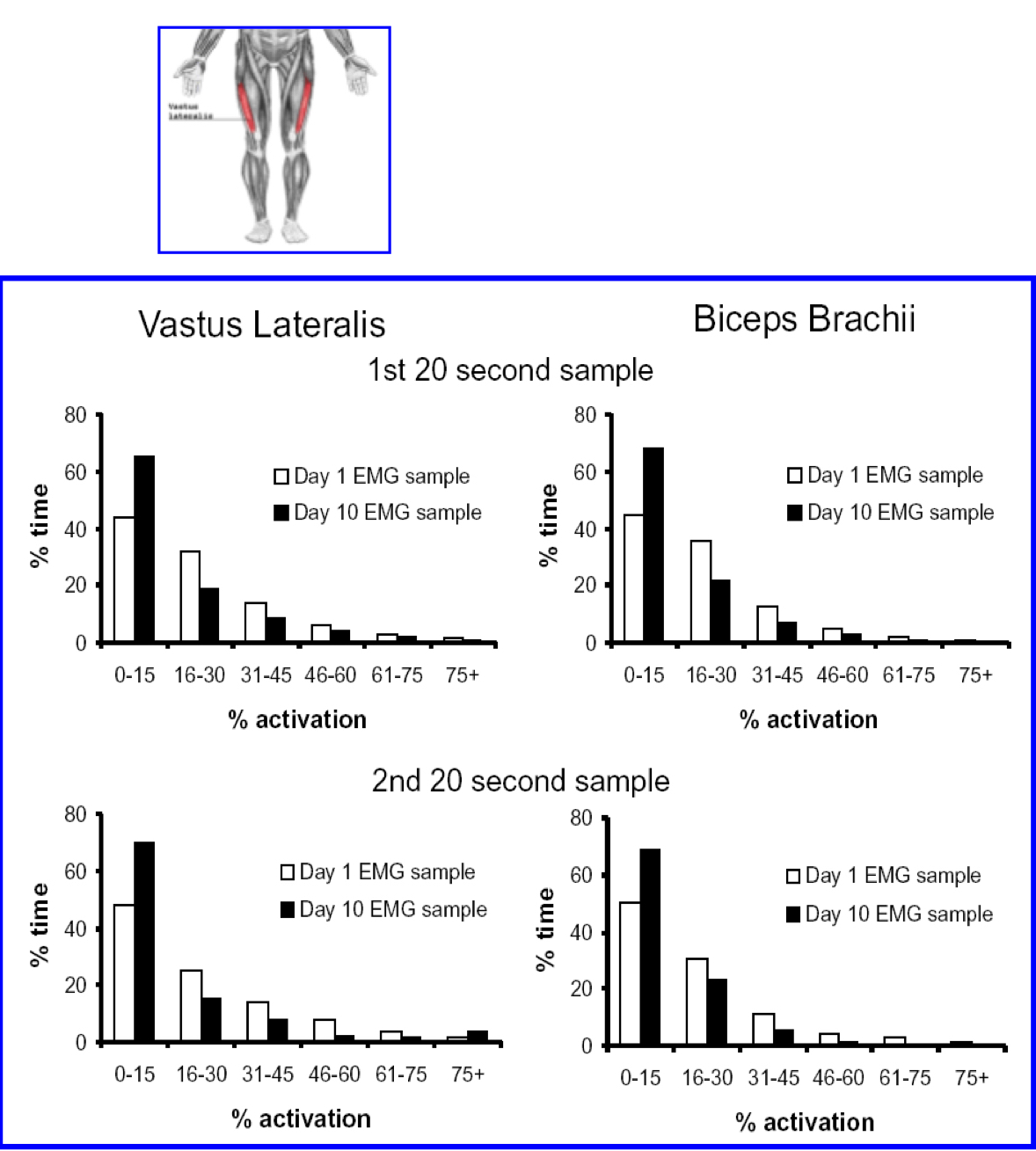
Slide 25: Neural Signal – MVC Reduction
Participants spent less time at high % of max voluntary contraction
Indicates:
↓ motor unit recruitment
↑ reliance on low-threshold units (more economical)
Reduced energetic demand
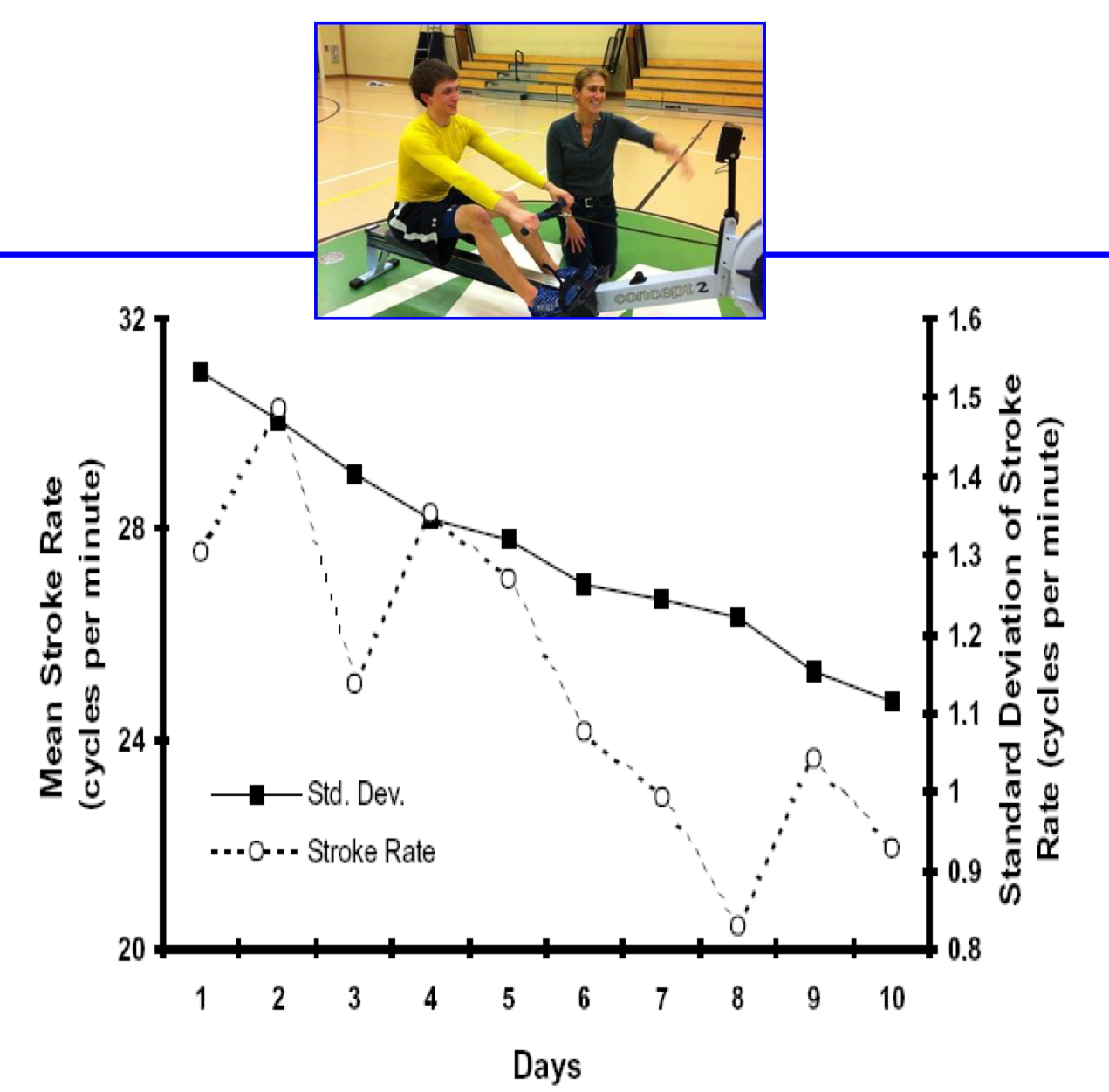
Slide 26: Stroke Rate & Coordination
Stroke rate became more stable
Slower, consistent stroke pattern emerged
Suggests improved motor planning and coordination
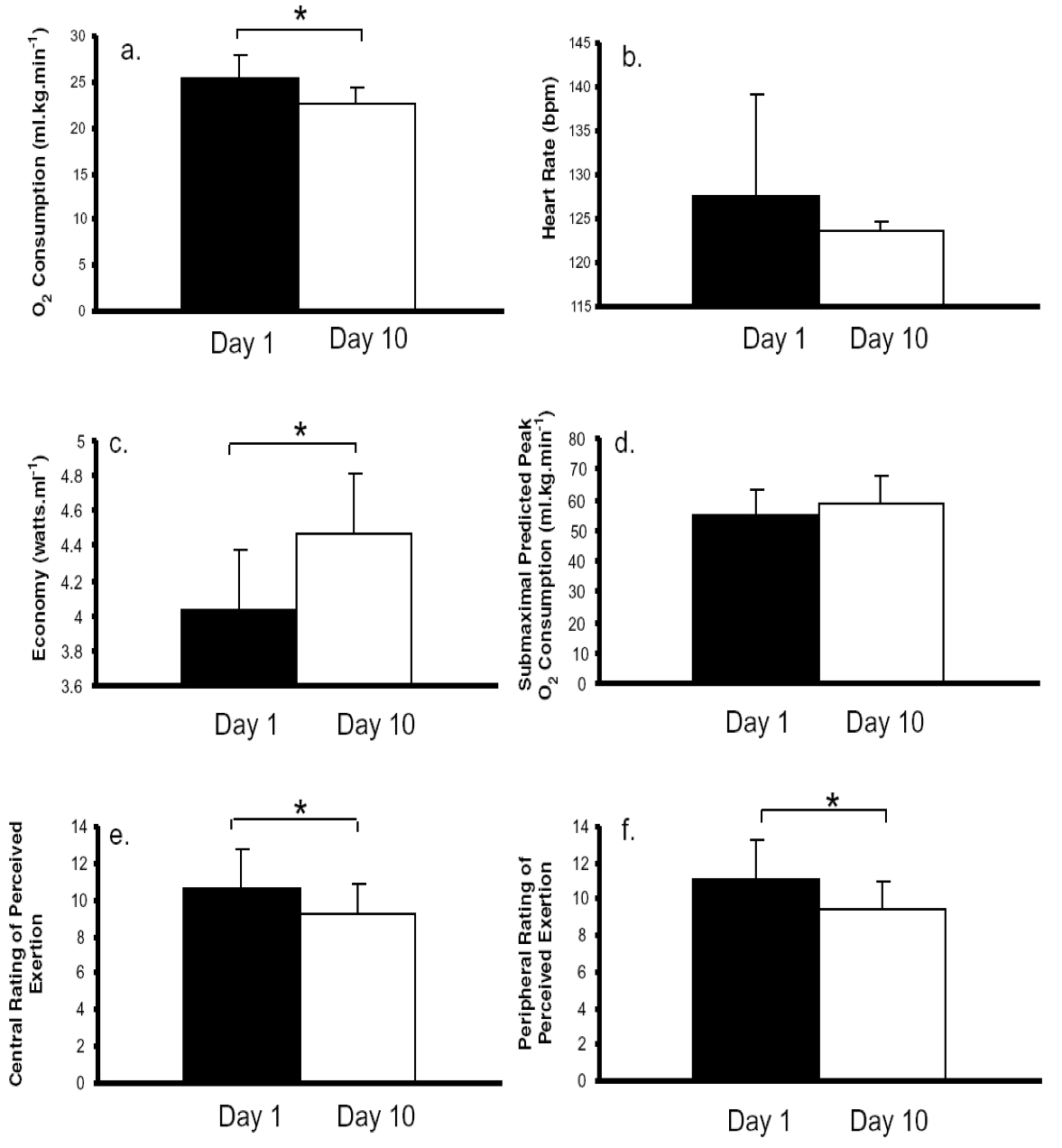
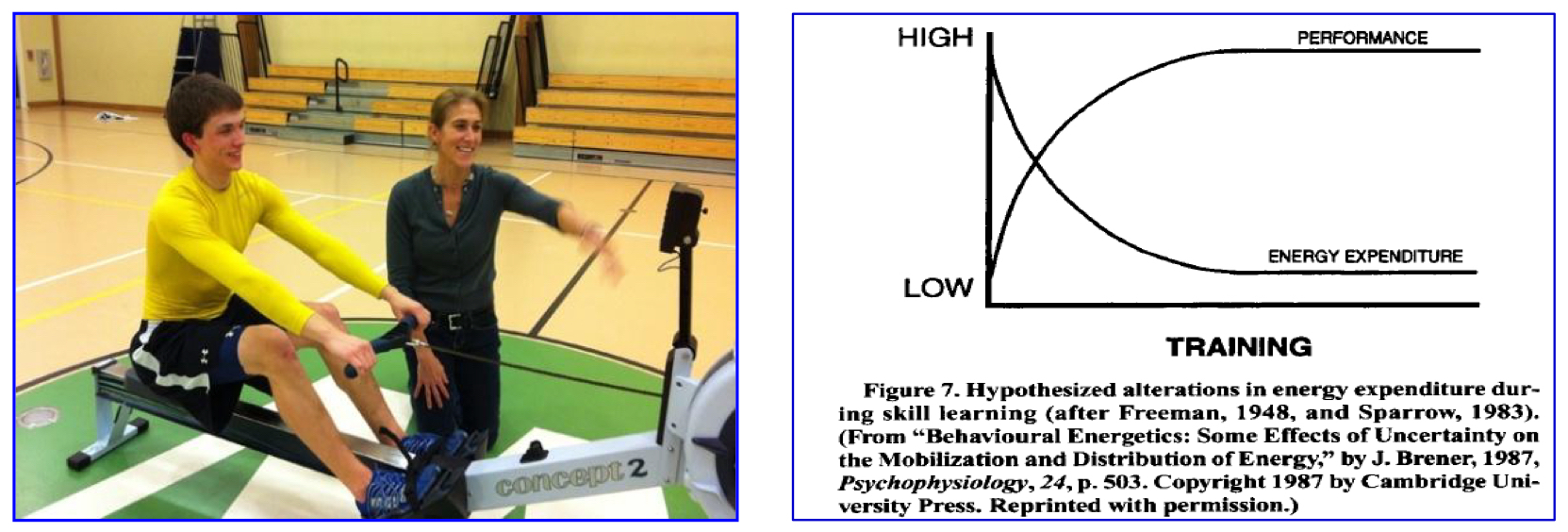
Slide 27: Energy Outcomes
From Day 1 to 10:
↓ O2 consumption
↓ Heart rate
↓ Perceived exertion (RPE)
Economy of movement increased
Training led to greater efficiency at same workload
Slide 28: Summary of Lay et al. (2002)
Practice led to:
Refined neural coordination
↓ Muscle activation = ↓ energy cost
Improved metabolic efficiency
Learning enhanced performance economy
Slide 29: Lecture Summary
Efficiency & Economy are fundamental to motor coordination
Preferred movement speeds often align with optimal energy use
Motor learning = restructuring recruitment and muscle coordination for efficiency
Skilled movement = ↓ global & local energy use, ↑ speed, stability, and accuracy
Slide 30: Lecture Conclusion
Skill learning includes:
The ability to economically & efficiently control movement
Task success depends on this coordination
Quote: “Ability to economically/efficiently coordinate & control movement to achieve the task goal” — Sparrow & Newell (1998)