EXSS3062 Week 3 Lecture 1
Slide 1: Introduction
• Course: EXSS3062 – Motor Control & Learning (MC3)
• Topic: Acquiring Information – Sensory Proprioception
• Definition: Proprioception plays a key role in coordinating, guiding, and adjusting movement to produce skilled performance.
• Quote: “The experience of our world, our reality, comes from sensation!” – Prof. Stephen Cobley
Slide 2: Acknowledgment of Country
• Acknowledges the traditional custodians of the land where the University of Sydney stands.
• Respects and honors Indigenous people who continue to care for the land.
• Artwork: Yanhambabirra Burambabirra Yalbailinya by Luke Penrith.
Slide 3: Copyright Notice
• Material is protected under the Copyright Act 1968.
• Only for use by University of Sydney students.
Slide 4: Assessment 1 – Lecture Quiz (Week 3)
• Availability: Quiz opens after the lecture, closes before the Week 4 lecture.
• Format: 3 multiple-choice questions (MCQs) on Motor Control & 3 on Motor Learning.
• Attempts: Two allowed; highest score recorded.
• Weighting: 5% of the total mark, contributing to 30 points across quizzes.
Slide 5: Key Learning Objectives
1. Explain how movement control depends on sensory afferent information integrated with efferent activity.
2. Identify sources of sensory afferent input:
• Golgi Tendon Organs (GTOs)
• Joint Receptors
• Efference Copy
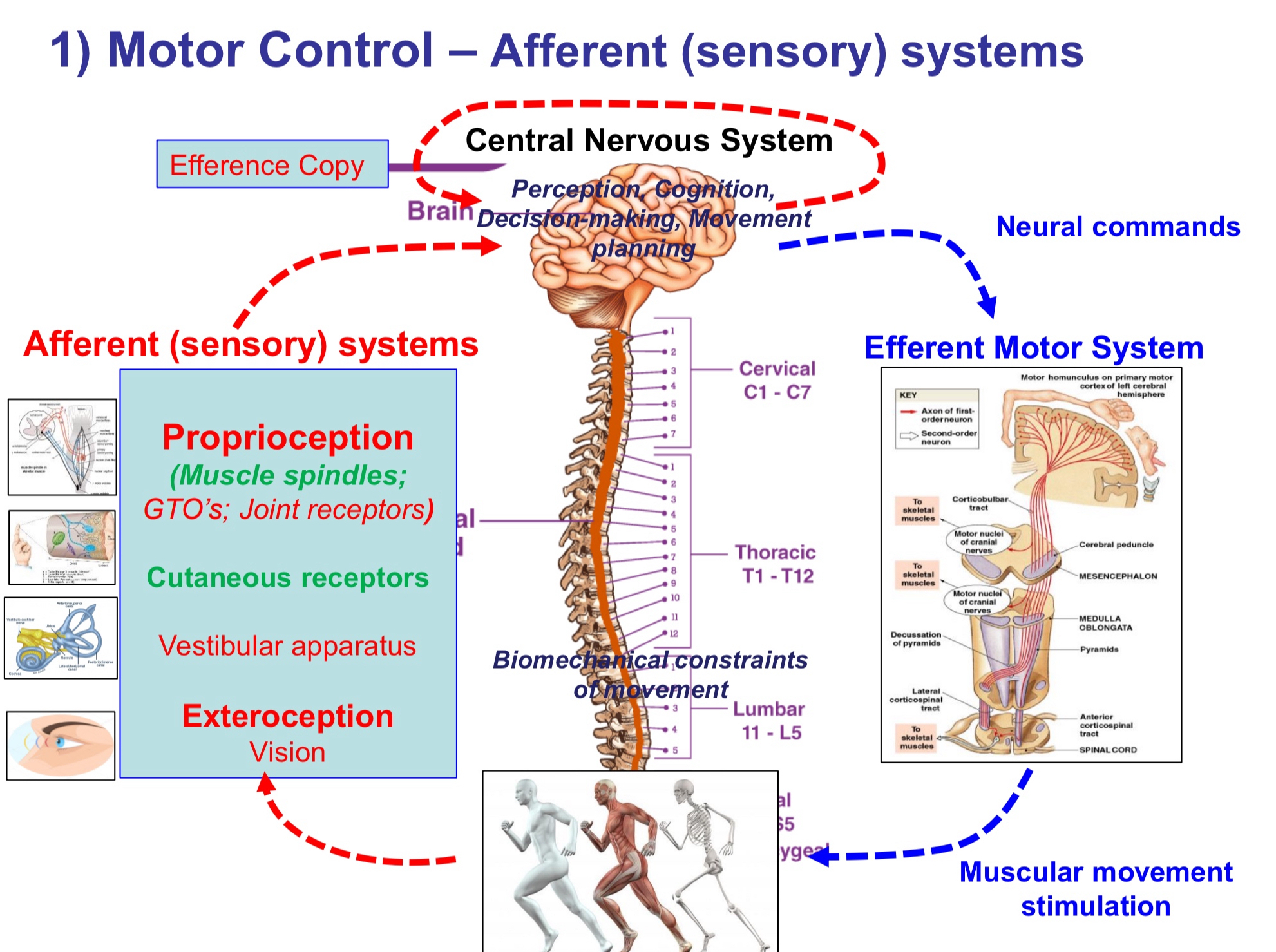
Slide 6: Sensory Input & Motor Control
• Sensory (Afferent) Systems: Provide feedback on body movement.
• Efferent Motor System: Sends commands for movement execution.
• Proprioception Components: Includes muscle spindles, GTOs, joint receptors, cutaneous receptors, vestibular apparatus, vision, and efference copy.
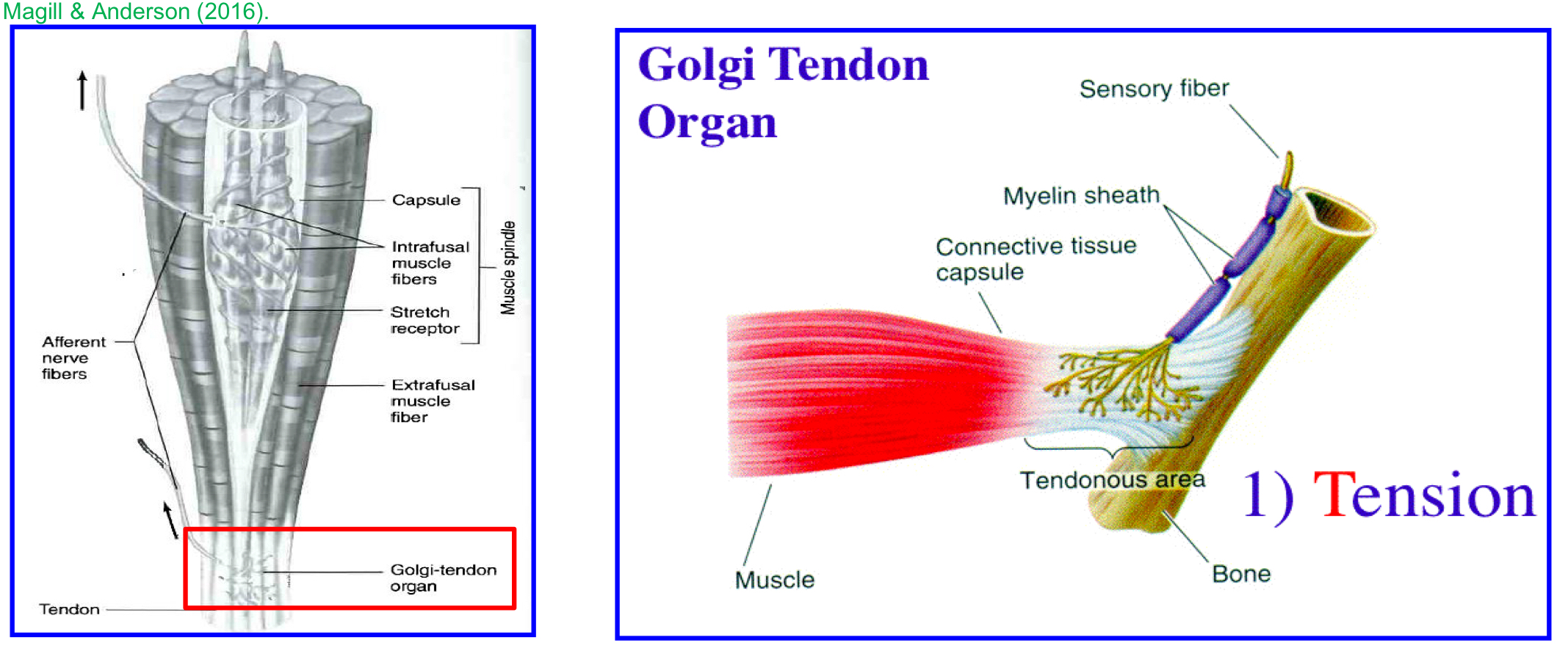
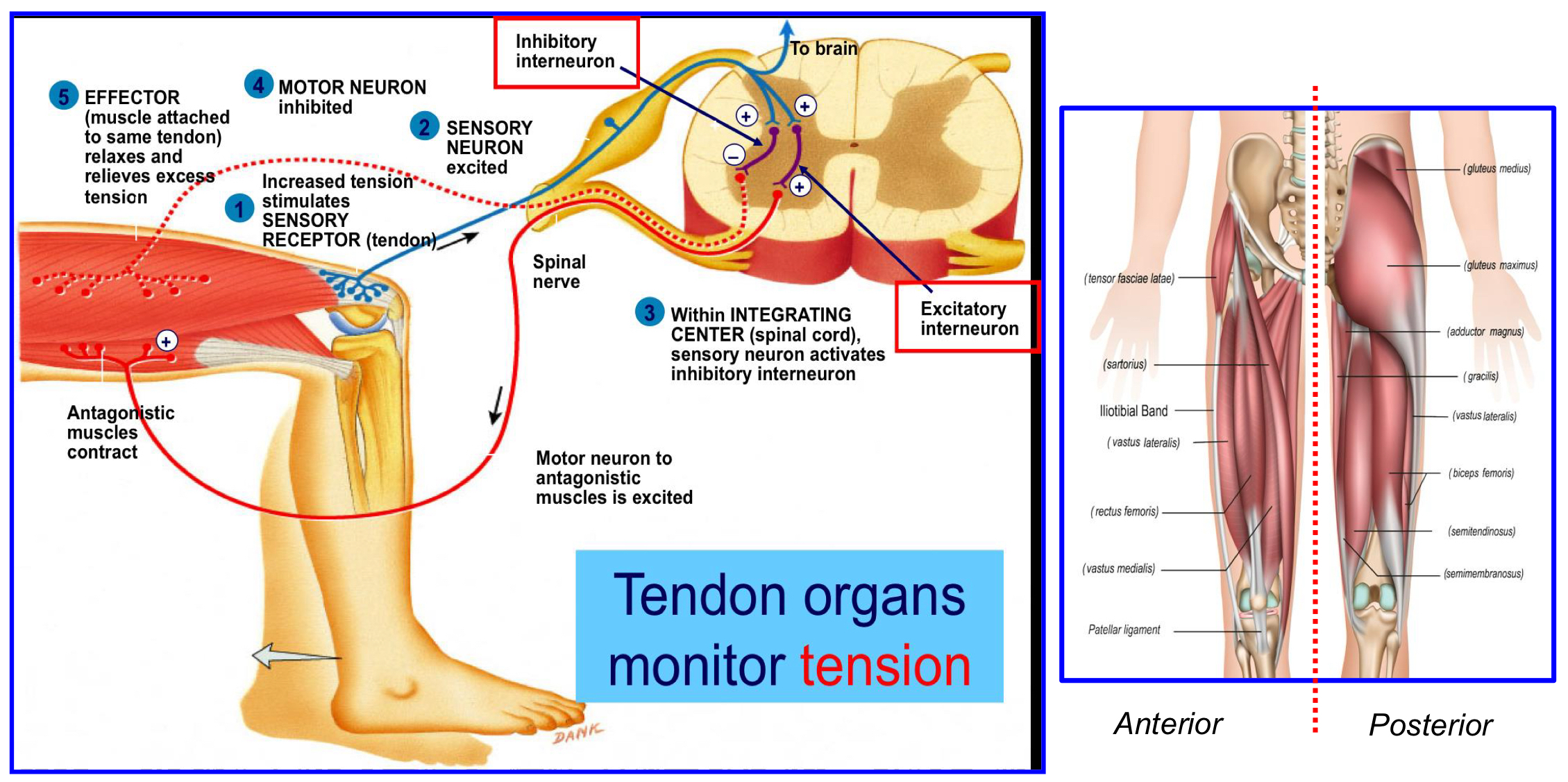
Slide 7-10: Golgi Tendon Organs (GTOs)
• Function: Detects muscle tension/force.
• Location: Between muscle fibers and tendons.
• Modality: Proprioception.
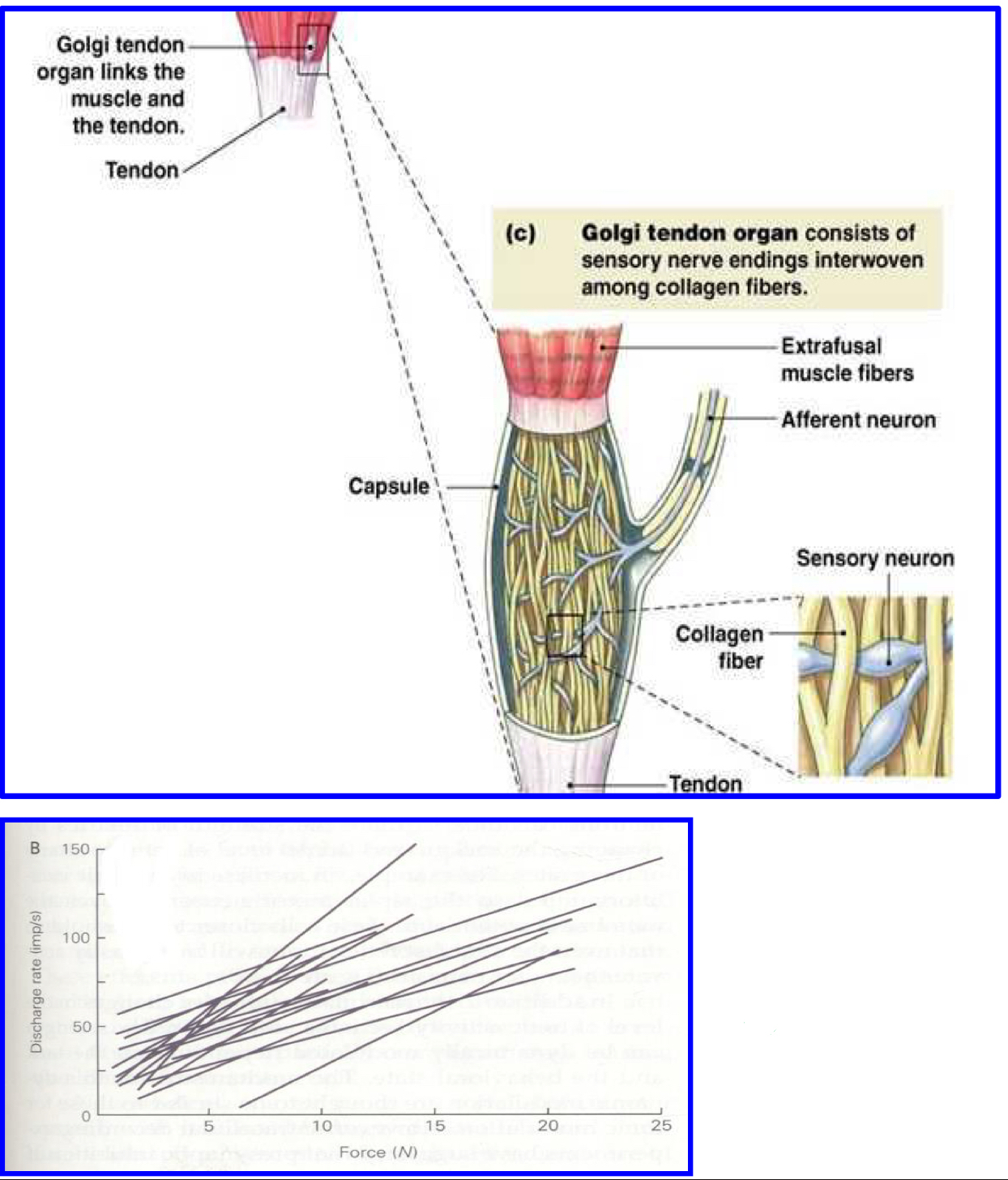
• Mechanism:
• Muscle force increases → GTOs increase neural discharge.
• Provides feedback to regulate muscle force and prevent excessive tension.
• Protective Role: Prevents muscle/tendon overstrain by triggering inhibitory reflex.
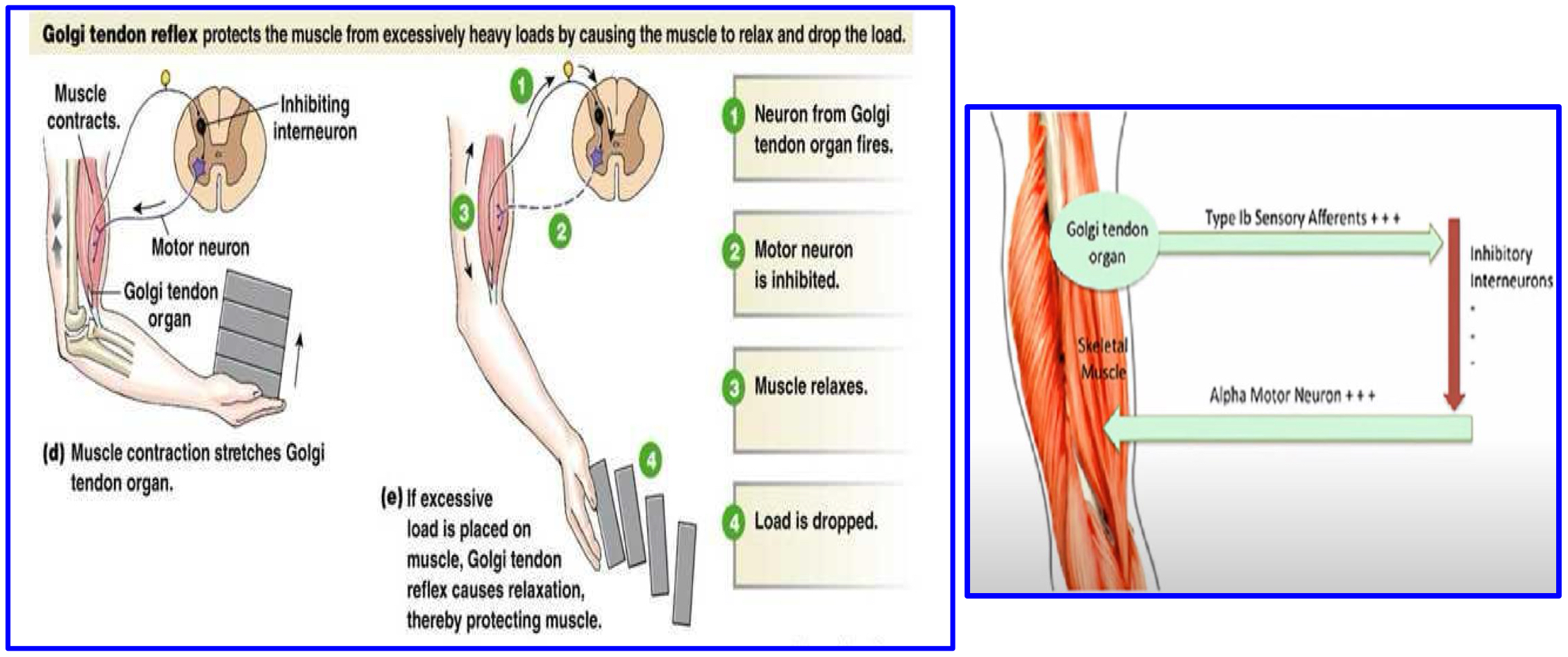
Slide 11-12: GTO Reflex
• Function: Signals CNS about muscle contraction/stretching.
• Prevents Injury: Stops excessive muscle tension from damaging muscles, tendons, and joints.
• Video Links: Demonstrations of GTO reflex action.
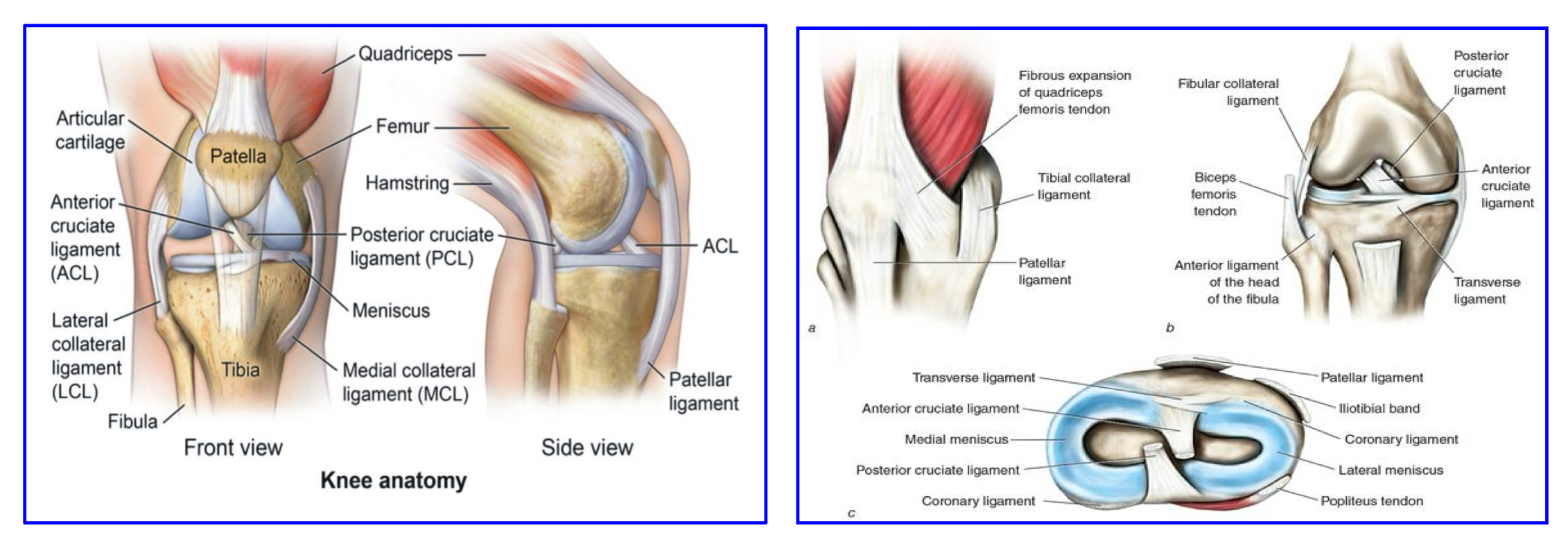
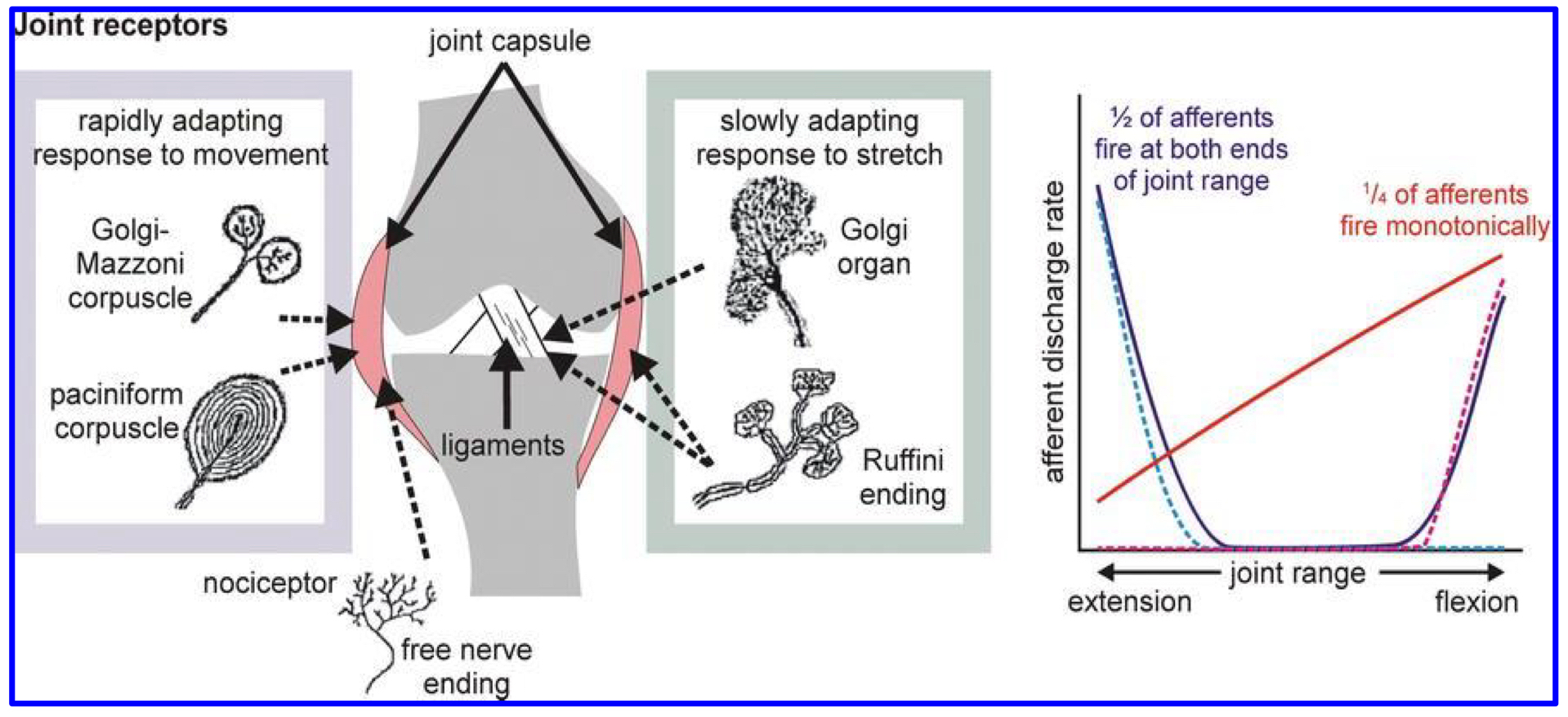
Slide 13-14: Joint Receptors
• Location: Synovial joints.
• Function: Detects mechanical deformation within capsules and ligaments.
• Firing Mechanism: Previously thought to fire only at extreme movement; now shown to fire throughout motion range.
• Primary Roles:
1. Awareness of joint position.
2. Protection from excessive flexion/extension.

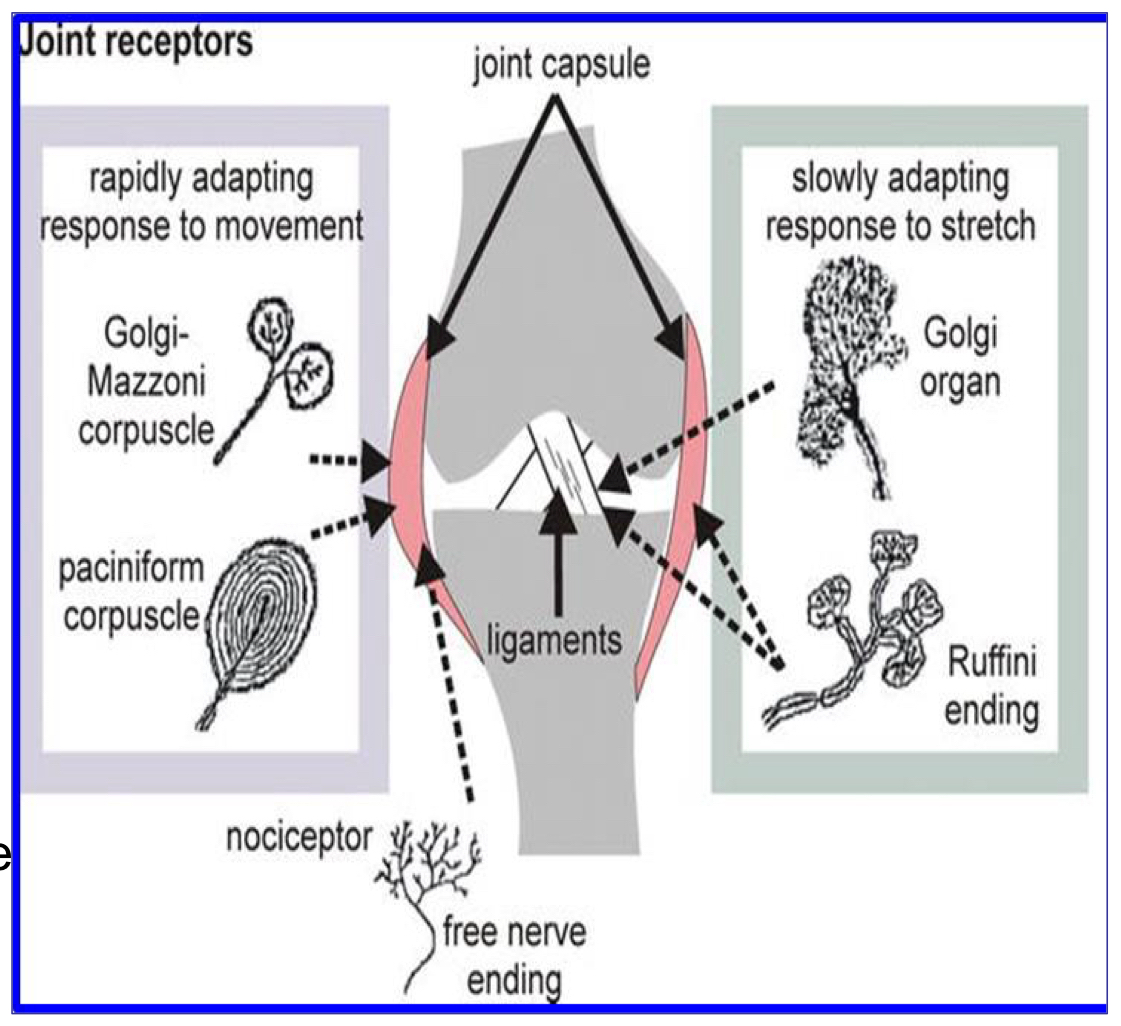
Slide 15-16: Types of Joint Receptors
1. Golgi-Mazzoni Corpuscles: Detects velocity/acceleration. (fast adapting)
2. Pacinian Corpuscles: Signals movement onset/termination. (fast adapting)
3. Ruffini Endings: Active in both motion and rest; detects speed. (slow adapting)
4. Golgi-type Endings: Respond to ligament stretch; active in extreme positions. (slow adapting)
Free nerve endings: located in joint capsule and connective tissue. Activated by mechanical or chemical irritation. (slow adapting)
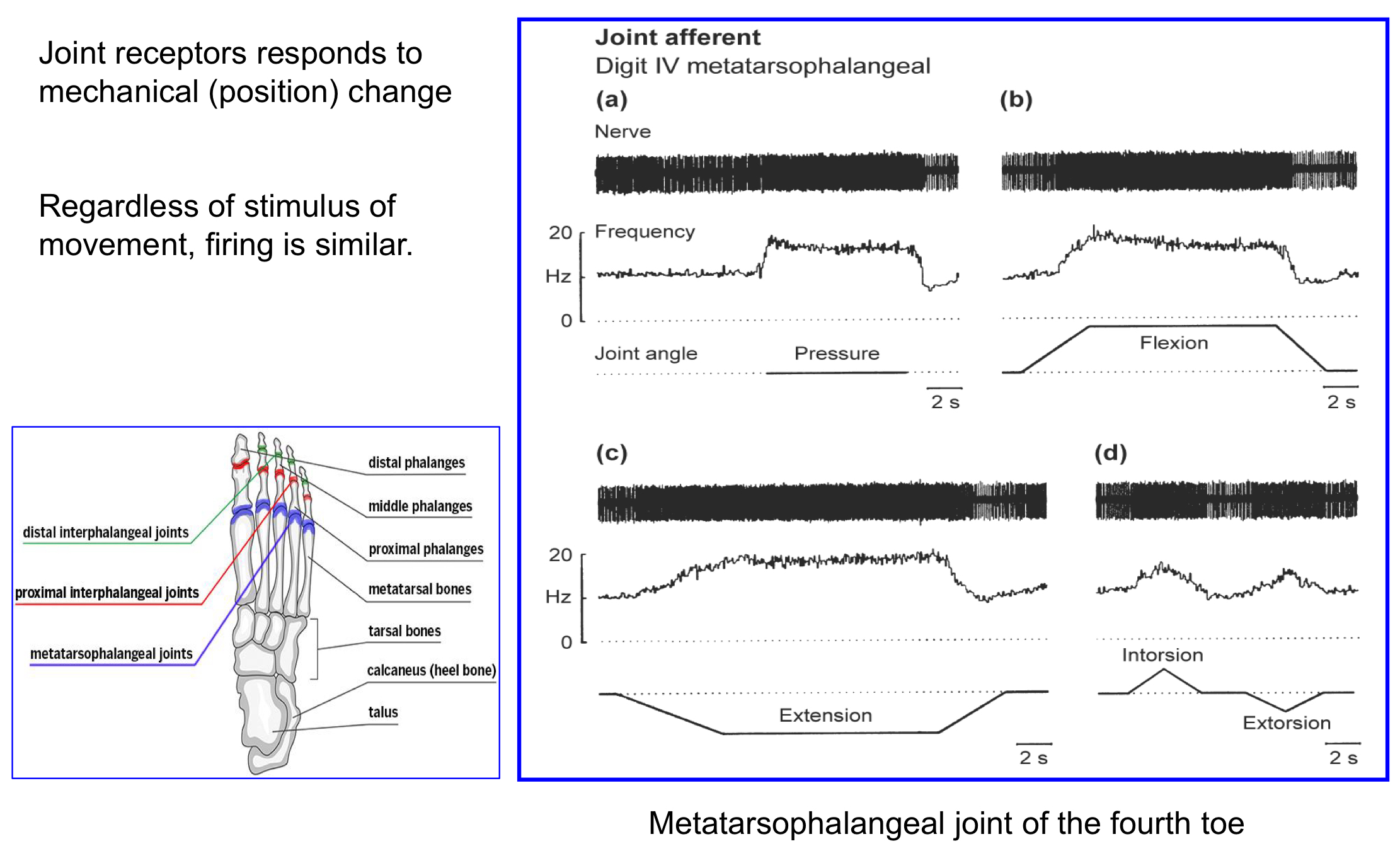
Slide 17-18: Joint Receptor Activation
• Joint receptors signal continuously but are more active at extreme positions.
• Swelling increases receptor sensitivity, influencing movement coordination.
• No position exists where all joint receptors are silent.
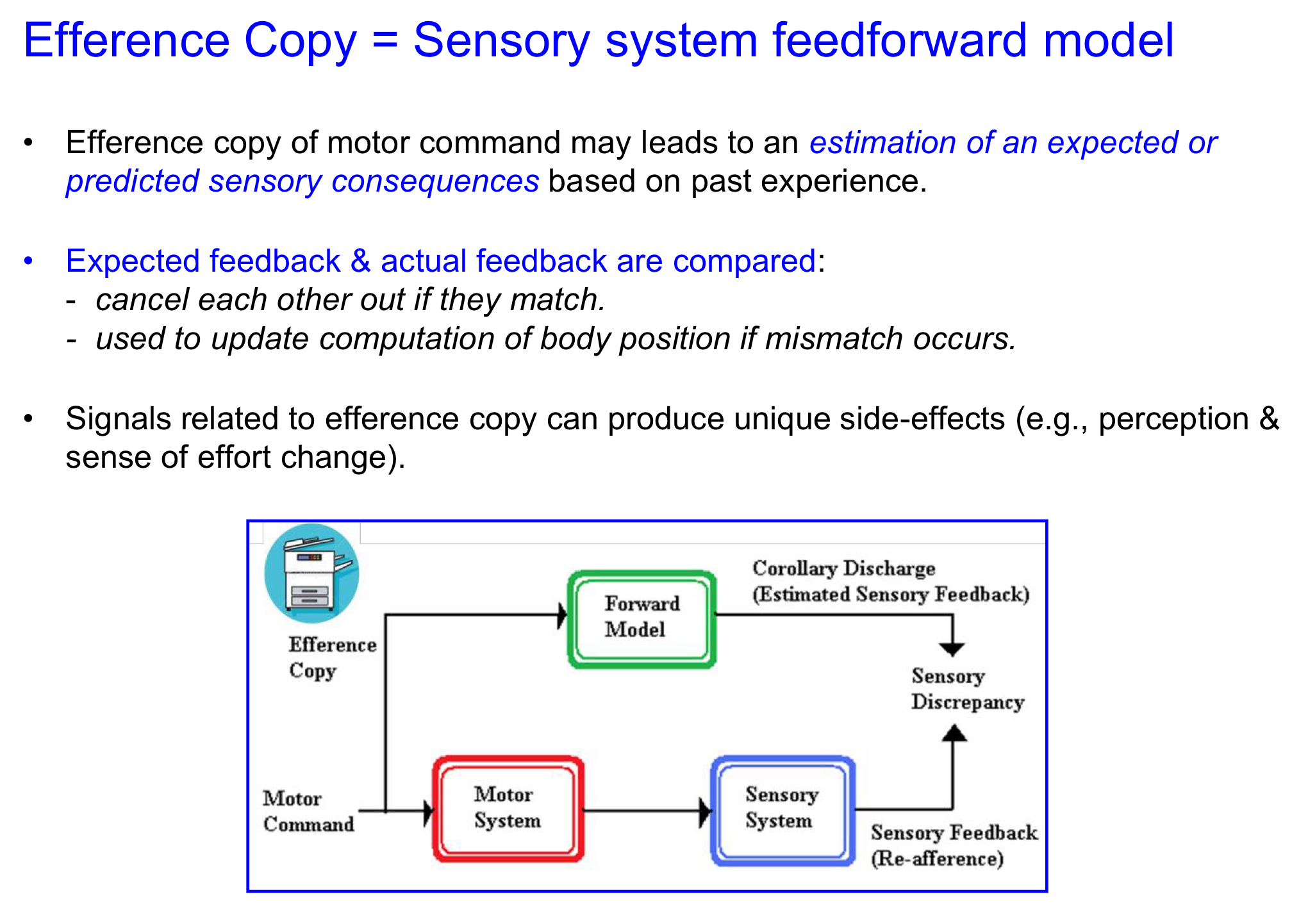
Slide 19-20: Efference Copy
• Definition: Internal copy of a motor command, used for movement prediction and adaptation.
• Function:
• Prepares sensory systems for upcoming movements.
• Compares expected vs. actual movement outcomes.
• Helps modify motor actions based on feedback.
• Proprioception Contribution: Provides feedforward sensory input to refine movement.

Slide 21-22: Feedforward & Feedback Control
• Efference Copy Mechanism:
1. Motor cortex sends movement command.
2. Efference copy informs the cerebellum of expected movement.
3. CNS compares expected vs. actual sensory feedback.
• Learning Aspect: Internal models improve with practice.

Slide 23-24: Evidence of Efference Copy
• Self-initiated vs. External Stimuli:
• Example: Tickle sensation reduced when self-initiated due to prediction.
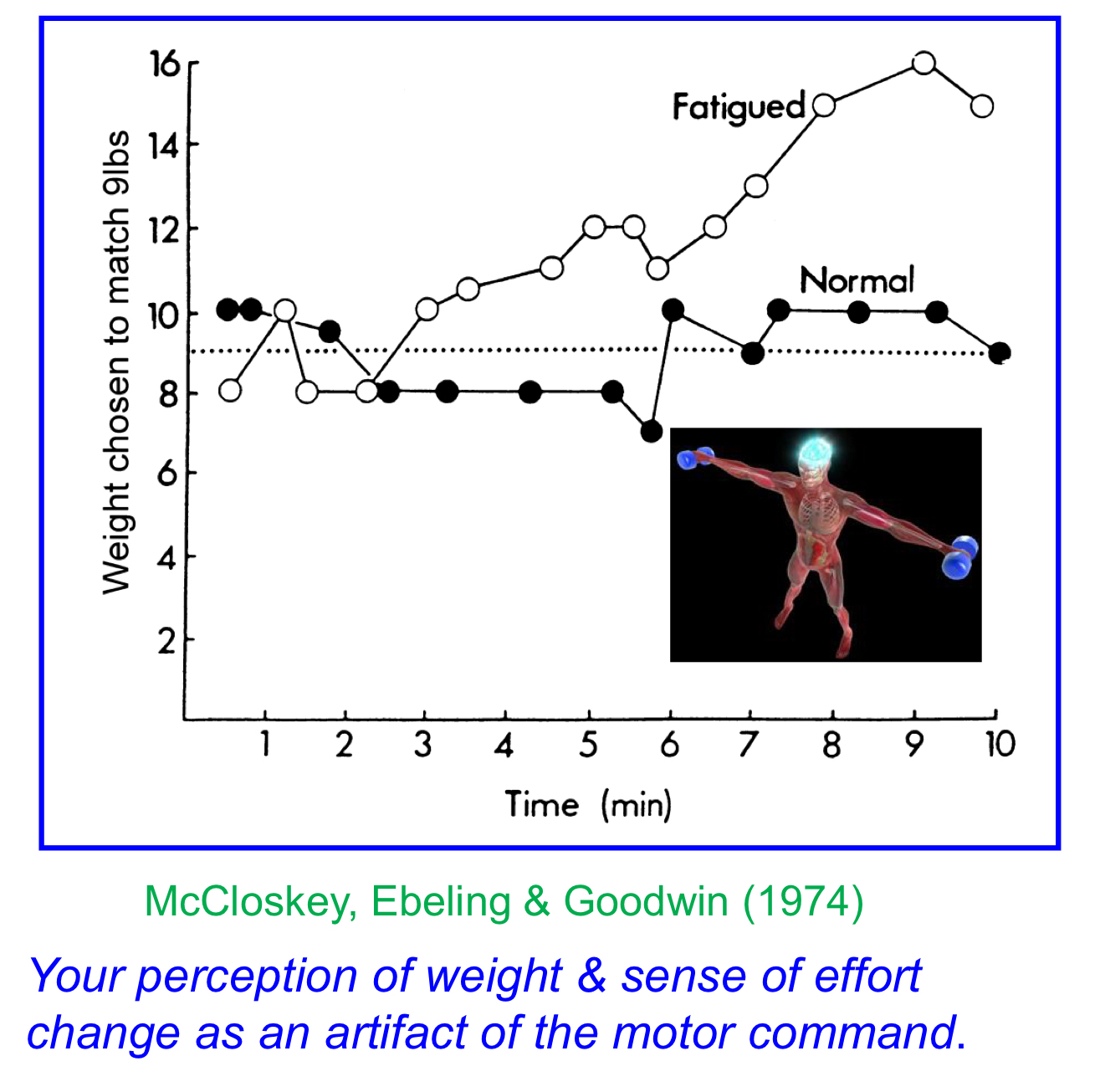
• Perception Adjustments:
• Phantom Limb Phenomenon: Brain maintains efference copy for missing limbs.
• Sense of Effort: Perceived weight increases over time due to muscle fatigue.
Slide 25: Efference Copy & Motor Control
• Key Function: Compares predicted vs. actual sensory outcomes.
• Results: Adjustments in movement execution based on mismatches.
Slide 26: Lecture Summary
• Sensory Neural Activity: Essential for motor control.
• GTOs: Monitor muscle force and prevent overstrain.
• Joint Receptors: Provide position sense and protect joints.
• Efference Copy: Enables predictive control and movement adaptation.
Slide 27: Sensory Receptor Overview table
Sensory Receptor Organ | Transduced Information | Function |
Eyes | 3D light detection (adjustable) | Vision |
Ears | Sound detection | Hearing |
Vestibular System (utricle, saccule, semicircular canals) | Multi-axial accelerometers (linear & angular; adjustable) | Balance, equilibrium |
Cutaneous Receptors (Merkel cells, Ruffini endings, Meissner’s corpuscles, Pacinian corpuscles) | Pressure, stretch, mechanical deformation, vibration | Touch, texture, pressure, vibration |
Muscle Spindles | Length, velocity (adjustable) | Muscle length & velocity, joint position, vibration |
Golgi Tendon Organs | Tension/force | Muscle tension (force) |
Joint Receptors | Mechanical stretch/deformation | Joint position & movement |
Efference Copy (Multiple locations within CNS) | A copy of commands to muscles | Reference information for movement |
Nociceptors | Mechanical impacts, vibrations | Pain, itch, mechanical impacts, vibrations |