Chapter 11 - Rotational Motion
In physics we distinguish two types of motion for objects:
Translational (Linear) Motion - change of motion
Rotational Motion - change of orientation
In linear kinematics, we had measurements and variables which we used to describe the motion of an object
We need to ‘redefine’ and ‘rename’ these since now they will be for rotational kinematics
Variables for Linear Kinematics:
Measurement Variable Unit
Time t s
Displacement Δx, Δy m
Velocity vi, vf m/s
Acceleration a m/s2
Variables for Rotational Kinematics:
Measurement Variable Unit
Time t s
Displacement θ rad (radians)
Velocity ω rad/s
Acceleration α rad/s2
Everything in rotational kinematics we have already done in linear kinematics, so all of the concepts stay the same
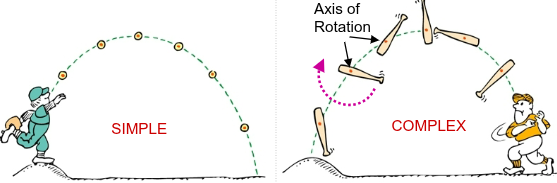
There are 2 types of pure unmixed motion:
Translational - linear motion
Rotational - motion involving a rotation or revolution around a fixed chosen axis (aka an axis that doesn’t move)
We need a system that defines BOTH types of motion working together on a system
Rotational quantities are usually defined with units involving a radian measure
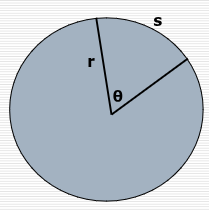
If we take the radius of a circle and LAY IT DOWN on the circumference, it will create an angle whose arc length is equal to R
In other words, one radian angle subtends an arc length s equal to the radius of the circle (R)
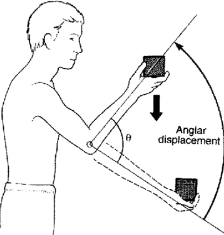
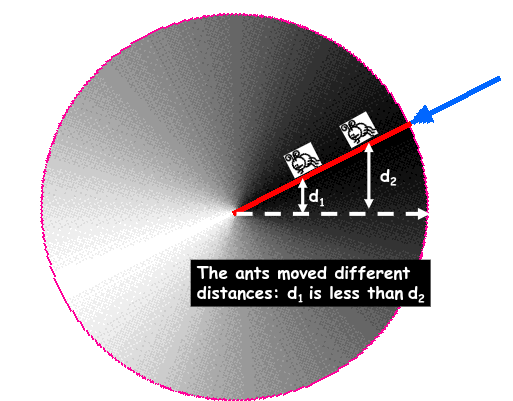
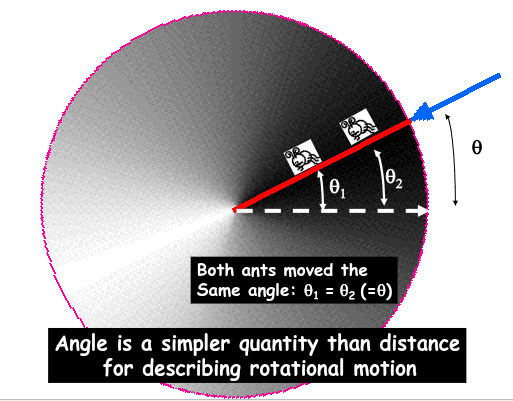
Displacement, measured in θ, is measured in radians
Just like linear, we have to include the direction
Counterclockwise is positive
Clockwise is negative
One revolution is 2π radians (aka 360°)
1 rev = 360° = 2π
θ (in radians) = Arc length / Radius
θ = s / r
Velocity is measured in rad/s,
ω = θ / r
Acceleration is measured in rad/s²
α = Δω / t
vf = vi + at ———> ωf = ωi + αt
Δx = vit +½ at² —> θ = ωit + ½ αt²
vf² = vi² + 2aΔx —> ωf² = ωi² + 2αθ
Δx = ½ (vi + vf)t -> θ = ½ (ωf + ωi)t
We can now do kinetic problems like we used to, except for the variable change
To succeed here, remember our new variables and terms
There is a way to link rotational and linear kinematics
vtan = rω
This equation uses the angular velocity and ‘converts’ it to linear, or translational velocity
Torque
Torque is the ‘rotational equivalent’ of force
Torques make objects change their rotational velocity (ω)
Torque is defined as:
τ = F⊥ℓ
Torque is considered:
positive when the force tends to produce a counterclockwise rotation about the axis
negative when the force tends to produce a clockwise rotation
The last equation is known as
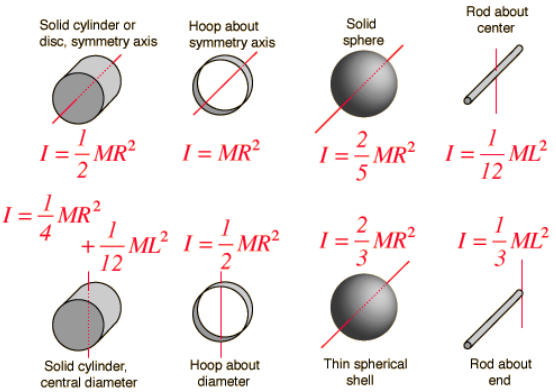
τ = Iα
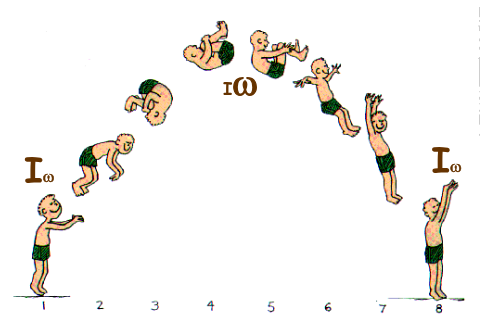
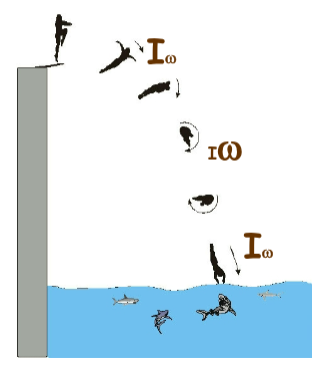
The moment of inertia is kind of like ‘mass’ but different objects rotate differently, so depending on the object and the distribution of the mass, there are different moments of inertia
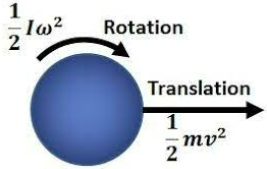
Rotational Kinetic Energy
Kinetic energy is the energy of motion
When you ‘spin’ or ‘rotate’, you are in motion
We will call our linear/translational motion kinetic energy is KEtrans
KE = ½mv² —> K=1/2Iω²
Rotation, Angular Motion & Angular Momentum