Note
3.0(2)
Explore Top Notes Note
Note Studied by 20 peopleNoteStudied by 18 peopleNoteStudied by 51 peopleNoteStudied by 7380 peopleNoteStudied by 7 peopleNoteStudied by 20 people
Studied by 20 peopleNoteStudied by 18 peopleNoteStudied by 51 peopleNoteStudied by 7380 peopleNoteStudied by 7 peopleNoteStudied by 20 people
Uses and Risk
Chapter 21 - Phylogeny, Speciation, and Extinction
My Notes
Unit 7: Torque and Rotational Motion
Chapter 10.3 Digestive Disorders
Chapter 3 - Human Development
Chapter 1-Conics
# 1.1
**Conic section**- Shapes that are obtained by taking different plane slices through a __double cone__
__Menaechmus__ (Greek mathematician) discovered conic sections around __350 BC__
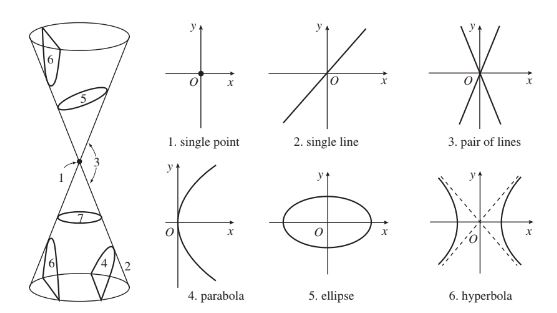
* Slice 7 is considered an ellipse
* **Ellipse-** An area where the sum of the distances from 2 fixed points on the plane remain constant
* The __ellipse__ and the __hyperbola__ both have a **centre**
* **Non-degenerate conics**- conics that are __parabolas, ellipses, or hyperbolas__
* **Degenerate**- A single point, line, and pair of lines
## 1.1.2 Circles
* **Circle**- a __type of conic,__ a set of points that lie at a fixed distance (radius), from a fixed point (centre)
* Use the techniques of coordinate geometry to find the __equation of a circle__ with given centre and radius.
* **Theorem 1**: The equation of a circle with centre (a,b) and radius r is (x-a)^2 + (y-b)^2 = r^2
* Why?
* This is a variation of the distance formula (d= (x1-x2)^2 + (y1-y2)^2)
### Example Problems
Write the equation for the given centre and radius
(a) centre the origin, radius 1
(1)^2 - (x-0)^2 + (y-0)^2
1= x^2 + y^2
**x^2 + y^2 -1 = 0**
(b) centre (3, 4), radius 3
(3)^2 = (x-3)^2 + (y-4)^2
9= (x-3)(x-3)+ (y-4)(y-4)
9 = x^2 + y^2 -6x -8y + 25
**x^2 + y^2 -6x -8y +16=0**
Determine the condition on the numbers f, g, and h in the equation x^2 + y^2 + fx + gy + h = 0 for the equation to pass through the __origin__
### **Explanation:**
* This is the __factored/ distributed form__ of our original equation
* We have to find the state of the equation when **a and b equal zero**…. (x-0)^2 and (y-0)^2
* We can factor our this form to see the conditions
* This would mean that **f,g, and h all must equal 0**
(c) Consider the set of points (x,y) that satisfy the equation: x^2 + y^2 -4x +6y +9 = 0
1. Our goal is to complete the square (note that the coefficients on x^2 and y^2 are both 1)
2. Re-write equations containing just the x-terms, and just the y-terms
x^2 − 4x = (x − 2)^2− 4
y^2 + 6y = (y + 3)^2 − 9
3. These terms can be substituted into our original equation
(x-2)^2 -4 + (y+3)^2 -9 +9 = 0
(x-2)^2 + (y+3)^2 = 4
4. This means that the circle has a radius of 2 and a centre of (2, -3)
**Theorem 2**: You can __complete the square__ in the equation x^2 + y^2 + fx + gy + h = 0 to put it in the form (x+1/2f)^2 + (y+1/2g)^2 = 1/4 f^2 +1/4g^2 -h
This equation represents a circle with the centre (-1/2f, -1/2g) and a radius sqrt(1/4f^2 + 1/4g^2 -h)
This only occurs when the 1/4f^2 + 1/4g^2 -h is greater than zero, if this is less than zero, we can prove that the figure is __not a circle__
**Why?**
The equation is equal to r^2 (radius squared), when any number is squared, it has to equal a positive number. Also, when you go to take the square root of this side of the equation, it is impossible to get a rational answer when square-rooting a negative number.
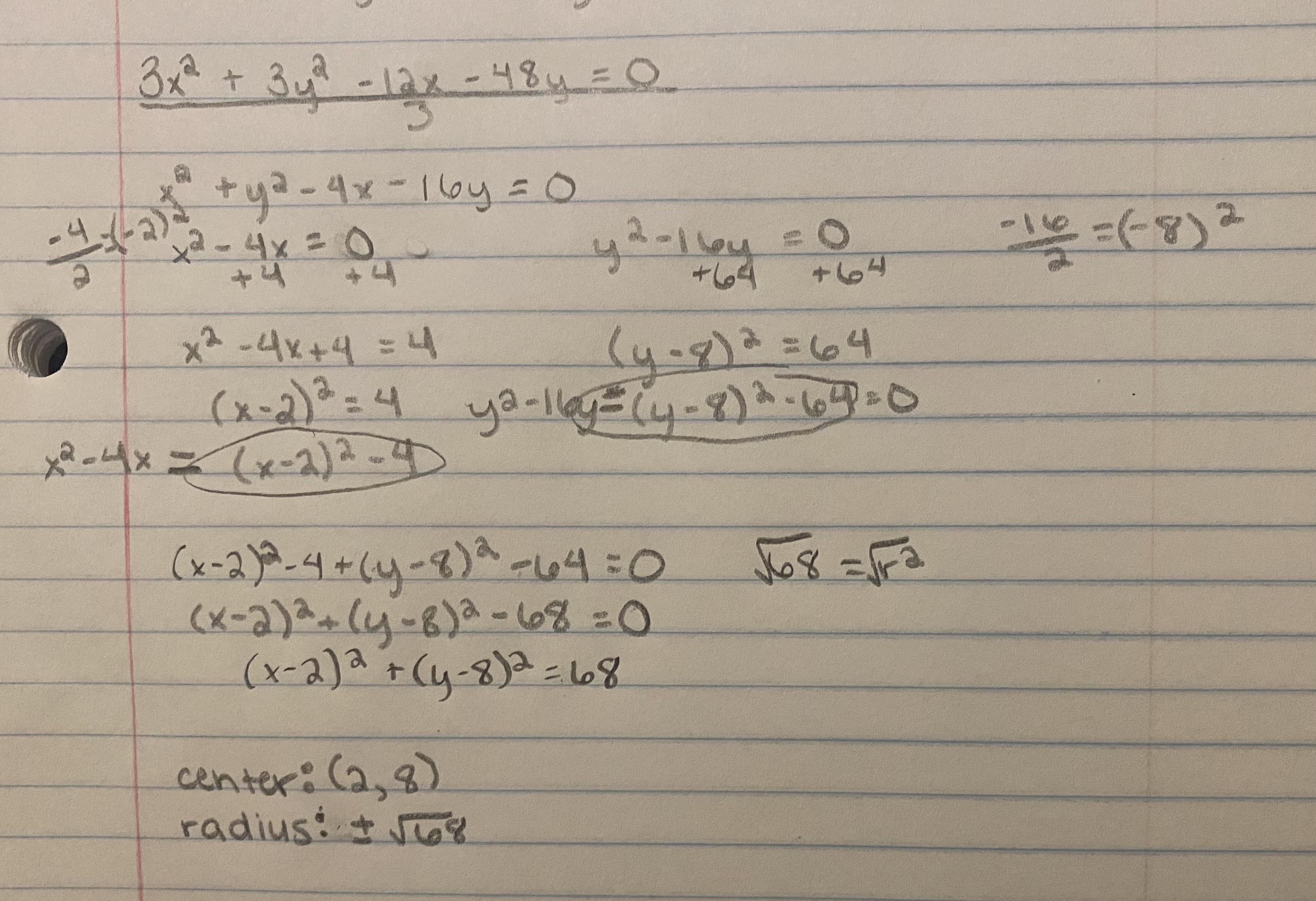
(d) Determine the centre and radius of the equation
3x^2 + 3y^2 − 12x − 48y = 0.
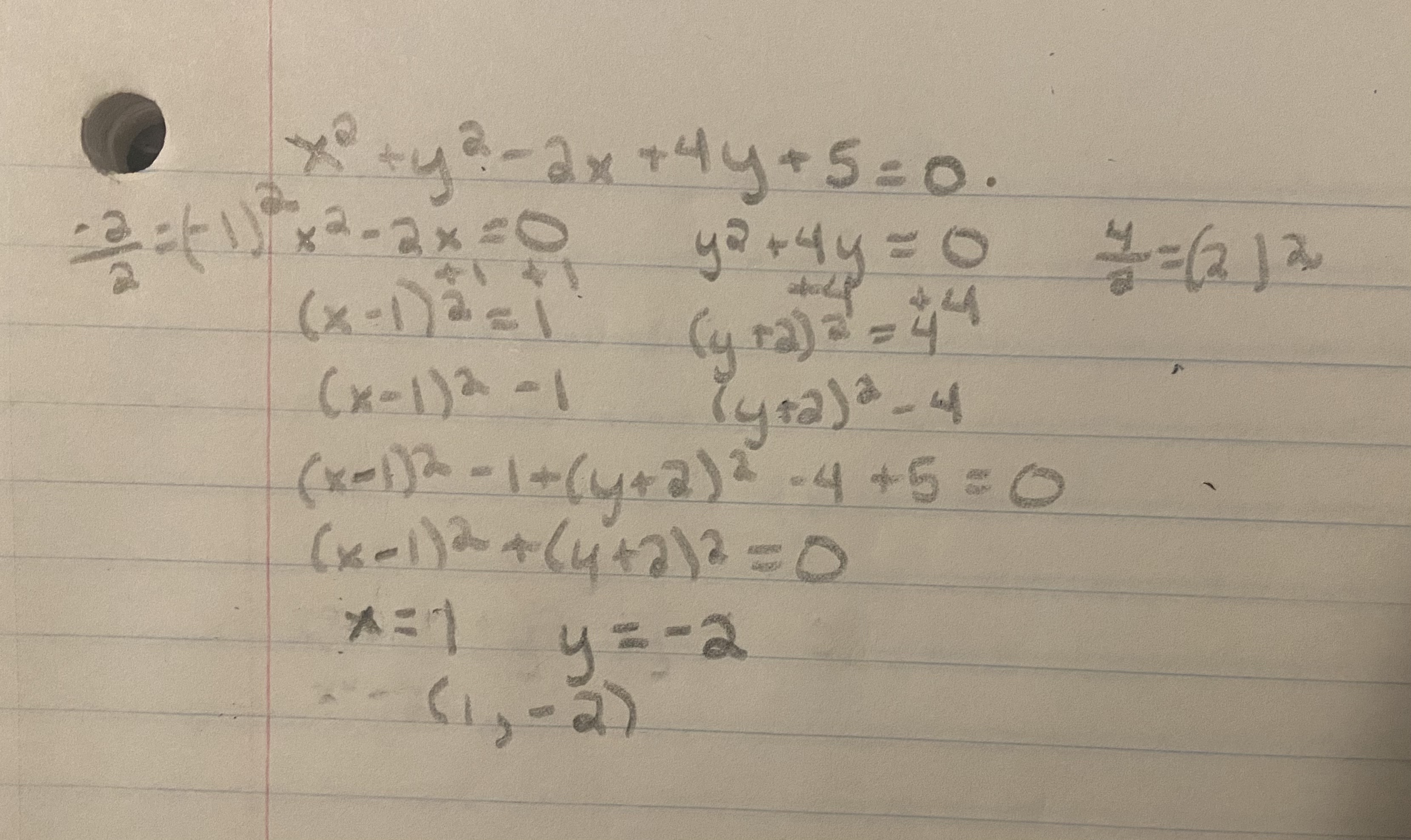
(e) Determine the set of points that satisfies the following equation
x^2 + y^2 − 2x + 4y + 5 = 0;
### Orthogonal Circles
Two intersecting circles that meet at __right angles__
**Theorem 3**: __Orthogonality__ test
Two intersecting circles with equations x^2 + y^2 + f1x + g1 y + h1 = 0 and x^2 + y^2 + f2x + g2 y + h2 = 0, are only orthogonal if f1 f2 + g1g2 = 2(h1 + h2).
Why?
This can be tested with the __pythagorem theorem__, where P is a point of intersection, and A and B are points inside of each of the circles. This means that
AP^2 + BP^2 = AB^2. Using our previous formulas, we know that 
This can be solved to result in the original equation

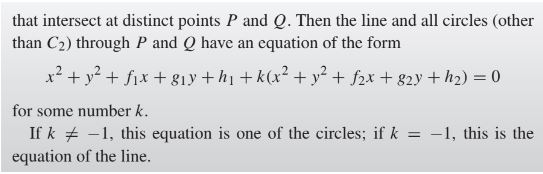
### Circles Through Two Points
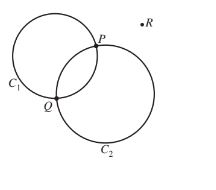
* In this image, the circle intersects at distinct points P and Q

This equation represents a circle when k __does not__ equal -1, and this means that P and Q will satisfy the equation
\

### Explanation:
These circles have distinct points of intersection, and the line containing these points can be expressed using the second equation, only when __k=-1.__ When k is any other number, this is the equation of __one of the circles__
\
## 1.1.3 Focus-Directrix Definition of the Non-Degenerate Conics
* The three __non-degenerate conics__ are the parabola, ellipse, and hyperbola
* The distance of a set of points from a fixed point (**focus**) follow a constant multiple (**eccentricity)**
* This distance is also followed from a line (**directrix**)
* **Eccentricity**- It is an ellipse if e (eccentricity) is between 0 and 1, a parabola of e equals 1, and a hyperbola is e is greater than 1
### Parabola (e=1)
* < 0, e > 1.
* Foci **(±ae, 0)** and Directrices **x = ±a/e**
* Parametric equations: x = a sec t, y = b tan t (t ∈ (−π/2, π/2) ∪ (π/2, 3π/2)).
* **Asymptotes-** the lines of the parabola that the branches grow closer to. They are notated as y = ±(b/a)x
### Rectangular Hyperbola
* ^^e= sqrt (2)^^
* This means that e^2=2 and a=b
* The __asymptotes__ have the equation **y = ±x,** so they are at __right angles__
* A hyperbola whose asymptotes are at right angles is called a __rectangular hyperbola__
* You can use the asymptotes as new __x and y axes,__ and the equation can then be written as xy = c^2
* The origin will always be at the __center__ in this form
Parametric equations: x = ct, y = c/t where t = 0.
### Polar Equation of a Conic
* You can describe the equation of a non-degenerate conic in terms of **polar coordinates**
* Polar coordinates: r and θ
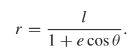
This formula comes from the equation **OP = e · PM** where the distance from the origin to a point is equal to the eccentricity multiplied by the distance between that same point and the directrix.
## 1.1.4 Focal Distance Properties
**Theorem 5:** The sum of the two focal distances from a point always equal double the major axis.
Why?
The distance from a point to __either foci__ is equal to the __eccentricity times the distance from said point__ __to the directrix.__ This distance is equal to the distance from the second foci to to second directrix **(d’ and f’).** When adding these two distances, they will always equal **2a** (double the major axis)
**Theorem 6:** Differences of __Focal Distances__ of Hyperbola
* If a point (P) is closer to **F**, then **PF’ - PF = 2a**
* If P is closer to **F’** then **PF’ - PF = -2a**
* |PF − PF| is __constant__ for every point on the parabola
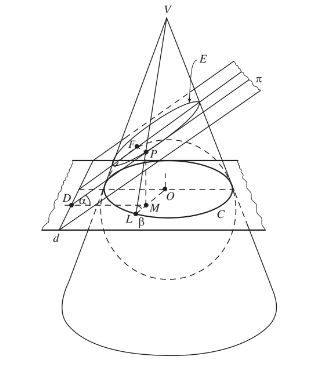
## 1.1.5 Dandelin Spheres
A slant plane (pi) that cuts one portion of a right, circular cone is an __ellipse__
# 1.2 Properties of Conics
## 1.2.1 Tangents
Goals: Find the slope of the line that is __tangent__ to the curve at the __parameter__, so that you can determine the __equation of the tangent__
**Theorem 1:** The slope of a tangent to a curve is **y’(t)/ x’(t)**
**Theorem 2:** Equations of tangents in __standard form__
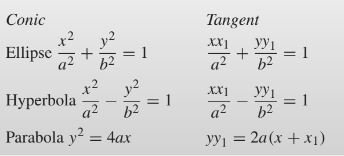
**Polar** of (a,b) with respect to the unit circle
* If (a,b) is some point on a tangent, then it can be determined that **ax1 + by1 = 1** because of the equation **xx1 + yy1 = 1**. This equation can be re-written with points x2 and y2, which deduces the fact that points
( x1, y1) and (x2, y2) are on the __same line,__ and this line is called the __polar of (a,b) with respect to the unit circle__
**Theorem 3:** When a point (a,b) lies __outside__ of the circle, and the tangents from point (a,b) touch the circle at P1 and P2, then the equation of the line is **ax + by = 1**
* **Normal of a curve**- the line through a point that is __perpindicular to the tangent__ of a curve at said point
* To find the equation of a normal of the curve, you find its __slope__ and the __coordinates__ of the point on the parabola where they intersect
## 1.2.2 Reflections
**Reflection law**- The angle that __incoming light__ makes with the __tangent__ to a surface is the same as the angle that the __reflected light__ makes with the tangent.
* Applies to all mirrors, whether __plane__ or __curved__
* Mirrors are often designed to have a __conic curve__
**Reflection property of the Ellipse** - light which comes from one focus of an __elliptical mirror__ is reflected at the ellipse to pass through the __second focus.__
**Reflection property of the hyperbola-** light coming from one focus of a hyperbolic mirror is reflected at the __hyperbola__ and makes the light appear to have come from the other focus (**Internal Reflection property**). Light going towards one focus is reflected towards the __other focus__ **(External Reflection Property**)
**Reflection Property of the Parabola**- incoming light __parallel__ to the axis is reflected at the __parabola__ to pass through the __focus__. Light coming from the focus of a parabola is reflected to give a beam of light parallel to the axis of the parabola
## 1.2.3
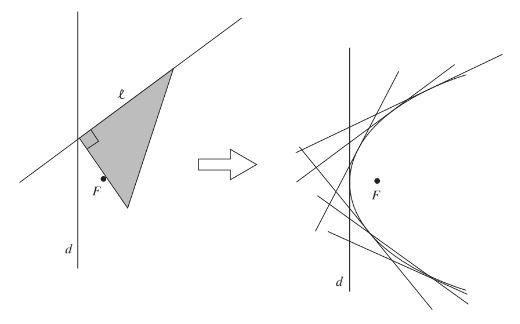
* __Non-degenerate conics__ are the __envelopes__ of a family of lines that are tangent to the conics
* The conic being constructed is the __curve in the plane__ that has each of the lines in the family as a tangent
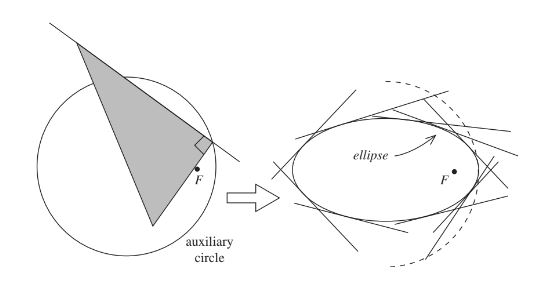
* **Auxiliary circle**- A circle whose diameter is its major axis
* The tangent to a parabola at its vertex is the auxiliary circle of the parabola
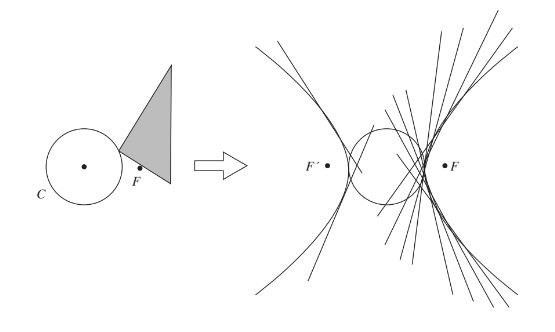
**Theorem 4:** A perpindicular from a focus of a non-degenerate conic to a tangent meets the tangent on the auxiliary circle of the conic
* When given a parabola and its axis, this theorem is used to identify the focus
### Envelope Drawings
**Parabola:**
**Ellipse:**
**Hyperbola:**
\
# 1.3 Recognizing Conics
**Standard form of conics**- the centre is at the __origin__, and the axes are parallel to the __x and y axis__
* Equations of all __non-degenerate conics__ follow this equation in __standard form:__
* Ax^2 + Bxy + Cy^2 + Fx + Gy + H = 0,
* Any non-degenerate conic can be determined from a conic in standard form using a __rotation__ **(x, y) → (x cos θ − y sin θ, x sin θ + y cos θ)** followed by a __translation__ **(x,y) → (x-a, y-b)**
* Both tranformations are __linear__, so the equation of the conic at each stage is just a __second degree__ of the original equation
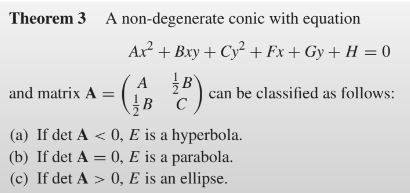
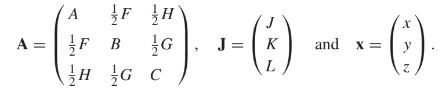
### Matrices
Matrix form of the equation: **x^T Ax + J^T x + H = 0.**
* Look back at the old equation: Ax^2 + Bxy + Cy^2 + Fx + Gy + H = 0
* The values from this form are used to plug into the __matrix form__
* 
\
**Theorem 2:** A 2x2 matrix P represents a __rotation__ of R^2 when P is __orthogonal__ and the det of P = 1
Classify a conic (E) with the equation Ax^2 + Bxy + Cy^2 + Fx + Gy + H = 0
1. Write the equation in __matrix__ form (**x^T Ax + J^T x + H = 0**)
2. Determine the __orthogonal matrix__ P, with a determinant of **1** that __diagonalizes__ A
3. Make the change of coordinate system **x=Px’**. This changes the equation to **λ1x’^2 + λ2 y’^2 + f x’ + gy’ + h = 0**
1. λ1 and λ2 are the __eigenvalues__ of A
4. Complete the square to rewrite the equation of E into **(x’’, y’’)** as the equation of a conic in standard form
5. Use the equation x’ = P^Tx to determine the __centre__ and __axes__ of E in the terms of the __original__ coordinate system.
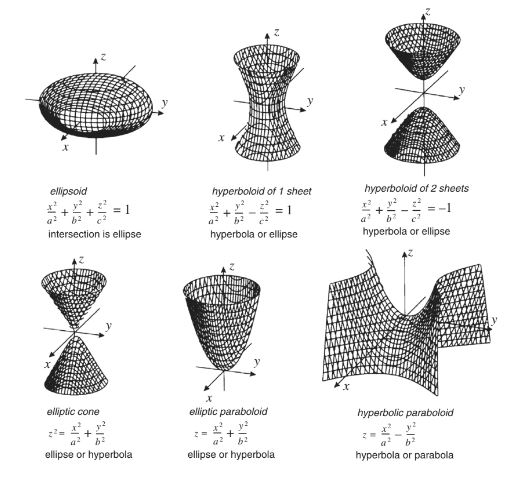
# 1.4 Quadric Surfaces
* **Quadric surfaces**- (quadrics) surfaces in R^3 that are the __natural analogues__ of the conics.
* Ax^2 + By^2 + Cz^2 + Fxy + Gyz + Hxz + Jx + Ky + Lz + M = 0
* **Degenerate quadrics**- Empty set, single point, single line, single plane, pair of planes, and a cylinder
* **Cylinder**- any surface that consists of an ellipse, parabola, or hyperbola in some plane
\
## 1.4.2
* Use the __orthogonal diagonalization__ of 3x3 matrices to classify non-degenerate quadrics, similarly to how 2x2 matrices were used to __classify conics__
**Idetifying matrices:** In the equation Ax^2 + By^2 + Cz^2 + Fxy + Gyz + Hxz + Jx + Ky + Lz + M = 0,
If a 3x3 matrix (P) represents a __rotation__ of R^3 about the origin when __P is orthogonal__ and **det P = 1**
Classify quadric E with the equation Ax^2 + By^2 + Cz^2 + Fxy + Gyz + Hxz + Jx + Ky + Lz + M = 0,
1. Write the equation in matrix form (**x^T Ax + J^T x + M = 0**)
2. Determine the __orthogonal matrix P, with a determinant of 1 that diagonalizes A__
3. Make the change of coordinate system **x=Px’.** This changes the equation to λ1x’^2 + λ2 y’^2 + λ3 z’^2 + jx’ + ky’ + lz” +m = 0
1. λ1, λ2, and λ3 are the __eigenvalues__ of A
4. Complete the square to rewrite the equation of E into **(x’’, y’’, z’’)** as the equation of a __quadric__ in standard form
5. Use the equation x’ = P^Tx to determine the centre and axes of E in the terms of the __original__ coordinate system.
## 1.4.3 Rulings of Quadric Surfaces
**Ruled Surface in R^3**- a surface that can be made up from a family of __straight lines__
### Hyperboloid of One Sheet
* **x^2 + y^2 - z^2 = 1**
* The surface meets each horizontal plane in a circle whose __centre lies on the z-axis__
* The surface meets each plane containing the z-axis in a __rectangular hyperbola__
* **Family of Generators**- (generating lines) straight lines that __construct__ the hyperboloid
* **Ruled surface**- __surface__ created by the generating lines
* There is a __second family__ of lines that are also generators of said surface, these lines are __rotated__ around the z-axis
* The lines that share a family never meet, but the lines of opposite families will always meet
**Theorem 2:** A hyperboloid of one sheet contains __two families__ of generating lines, **The members of each family are disjoint, and each member of either family intersects each member of the other,** with exactly __one exception__
### Hyperbolic Paraboloid
* Theorem 2 is also valid for this figure
\
\
Note
3.0(2)
Explore Top NotesNoteStudied by 20 peopleNoteStudied by 18 peopleNoteStudied by 51 peopleNoteStudied by 7380 peopleNoteStudied by 7 peopleNoteStudied by 20 people
Uses and Risk
Chapter 21 - Phylogeny, Speciation, and Extinction
My Notes
Unit 7: Torque and Rotational Motion
Chapter 10.3 Digestive Disorders
Chapter 3 - Human Development